Comparison of Meshing Strategies in THR Finite Element Modelling



Abstract
:1. Introduction
2. Materials and Methods
- 1)
- Automatic meshing method: An extensible mesh is realized if possible, otherwise a tetrahedral mesh with a patch-conforming algorithm is optimized, in which the position of the nodes is performed in an automatic way by the program-controlled software.
- 2)
- Tetrahedron/hybrid meshing method: With this method, it is possible to generate an exclusively tetrahedral mesh. There is the possibility of choosing between the “patch-conforming” and “patch-independent” algorithm. The first uses Delaunay triangulation for tetrahedron formation. The second is based on a spatial subdivision. This algorithm ensures a refinement of the mesh, where necessary, but preserves larger elements where possible, allowing a faster calculation. It is based on the creation of a tetrahedron that incorporates the entire structure, then this is divided up into the required size.
- 3)
- Hex-dominant meshing method: This generates a completely hexahedral mesh; this option is recommended for inextensible bodies. The elements formed by this type of mesh are smaller than a tetrahedral mesh, and for this reason, it is not recommended for large bodies. The algorithms check that this type of mesh is applicable through the calculation of the normalized area volume ratio; if this is greater than two, it is necessary to pay attention.
- 4)
- Sweep meshing method: This forces a diffuse mesh on extensible bodies, including axially-extensible bodies. A mesh of this type is preferable on extensible bodies or if it is necessary to calculate the mesh of a body that rotates around an axis.
- 5)
- “Multizone”: This is a technique that uses an algorithm of the “patch-independent” type, providing the automatic decomposition of the geometry into extensible and free regions. It will achieve a purely hexahedral mesh in structured regions and a free one in unstructured regions. It is possible to choose the shape of the element to use (hexahedral form, hexahedrons, and prisms). If a body has parts that should be discretized through the “multizone” approach and others do not, the former will be discretized according to this option, while the others according to the default method.
- 6)
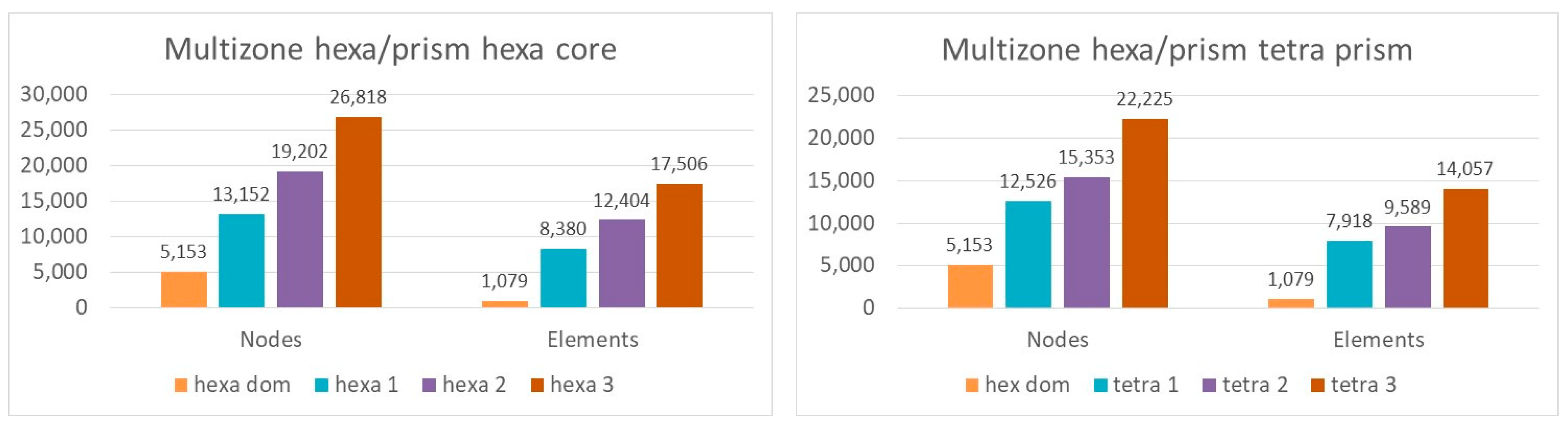
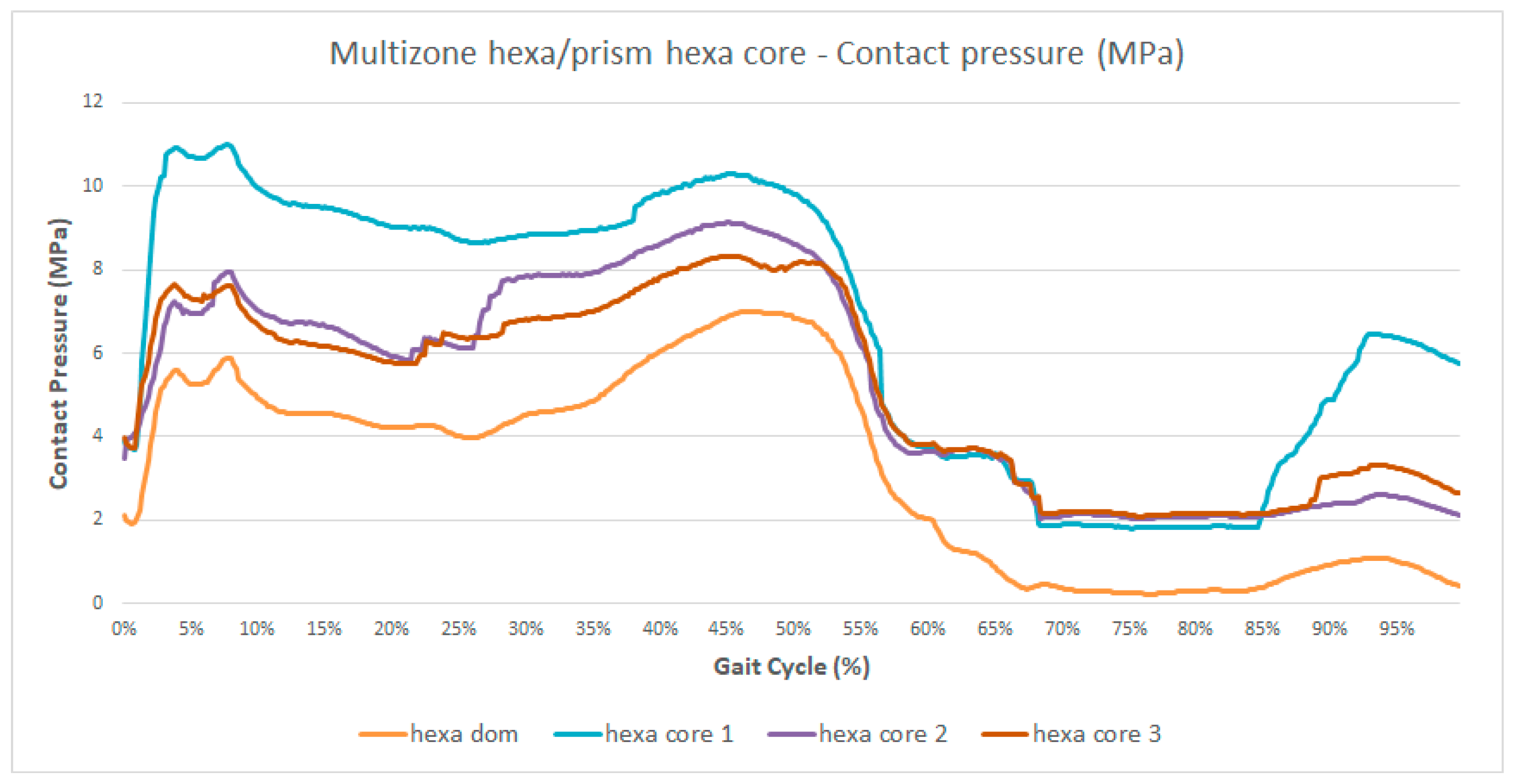
- Hexa-core: This will use a bottom-up meshing approach. It will retain the tri-surface or prism mesh, delete the existing tetra-mesh, and remesh the internal volume with a Cartesian approach.
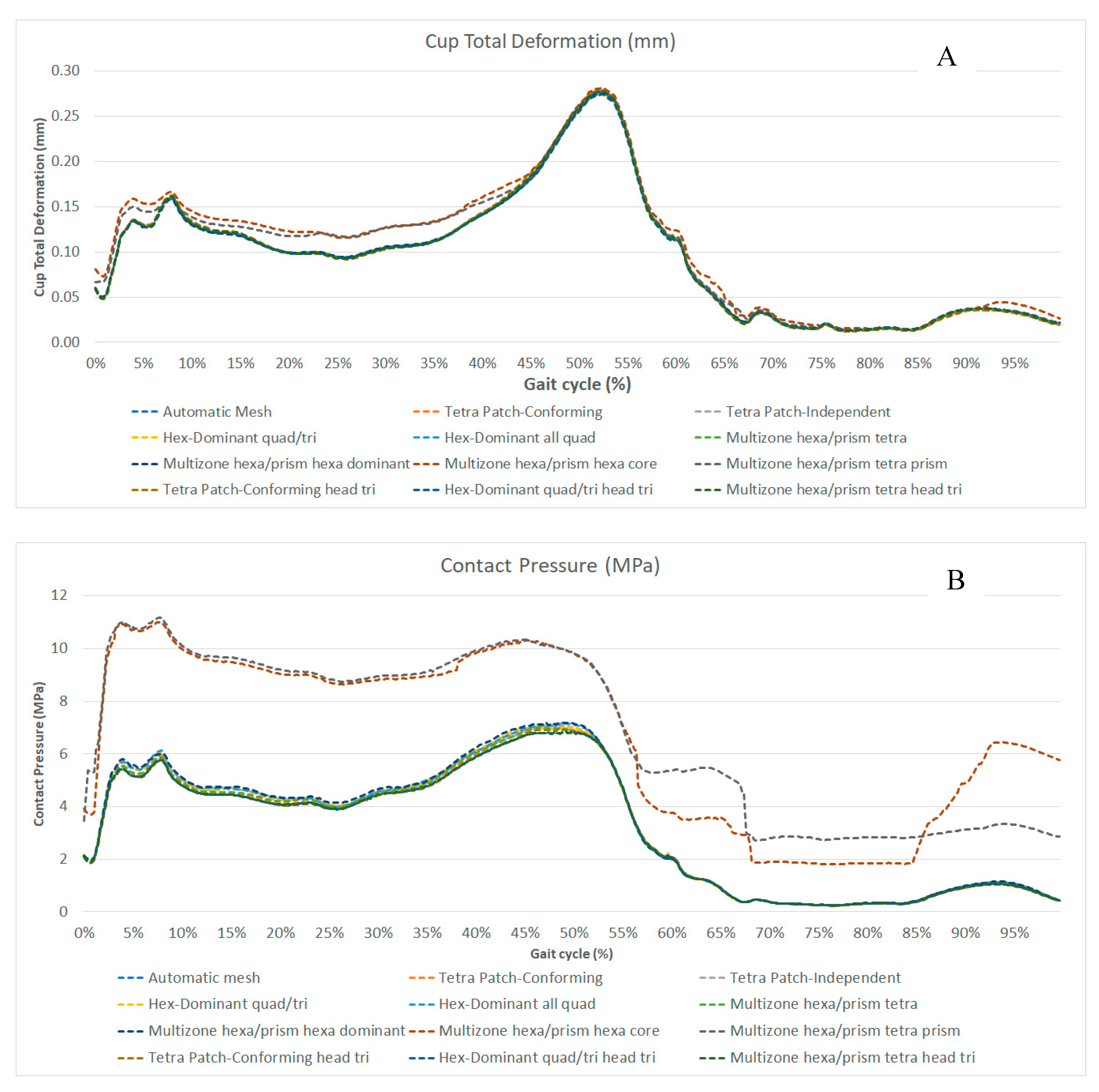
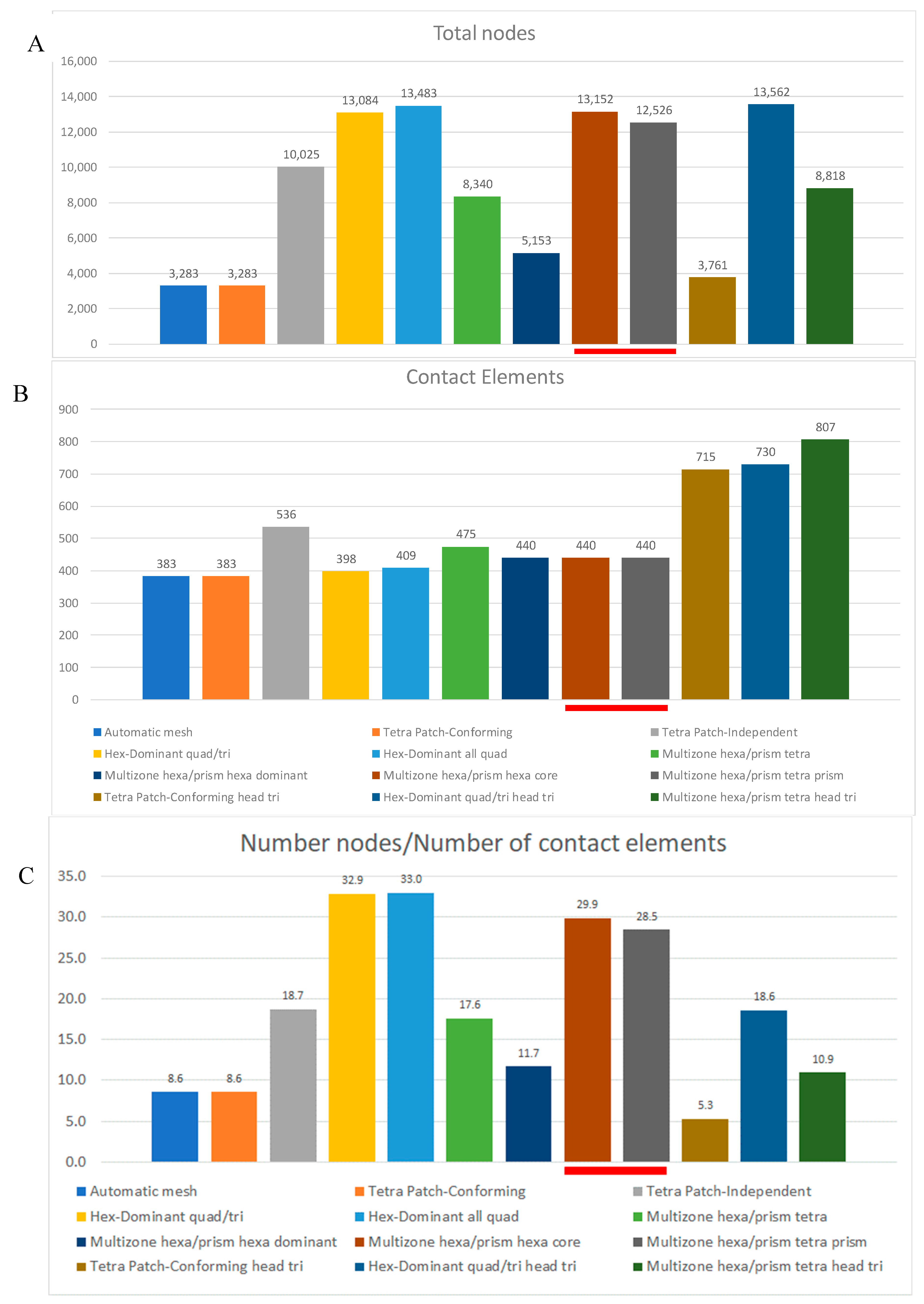
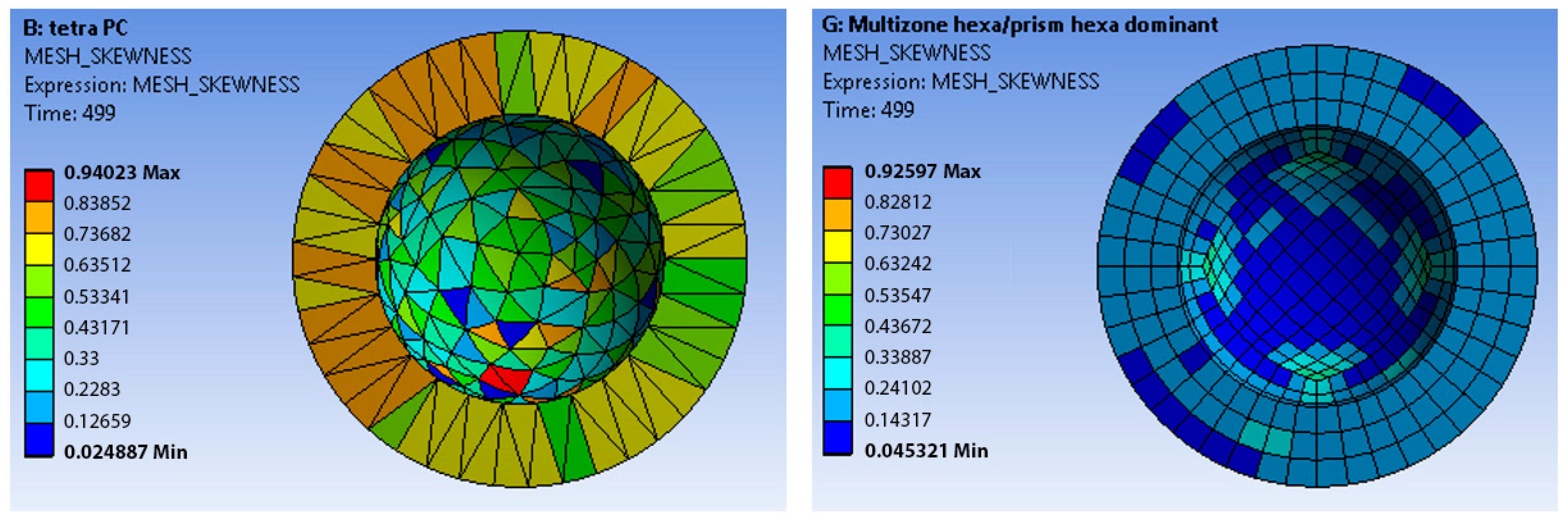
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Affatato, S.; Merola, M.; Ruggiero, A. Development of a Novel in Silico Model to Investigate the Influence of Radial Clearance on the Acetabular Cup Contact Pressure in Hip Implants. Materials (Basel) 2018, 11, 1282. [Google Scholar] [CrossRef]
- Ruggiero, A.; Affatato, S.; Merola, M.; De Simone, M.C. FEM analysis of metal on UHMWPE total hip prosthesis during normal walking cycle. In Proceedings of the XXIII Conference of the Italian Association of Theoretical and Applied Mechanics, Salerno, Italy, 4–7 September 2017; pp. 4–7. [Google Scholar]
- Brekelmans, W.A.M.; Poort, H.W.; Slooff, T.J.J.H. A new method to analyse the mechanical behaviour of skeletal parts. Acta Orthop. 1972, 43, 301–317. [Google Scholar] [CrossRef]
- Shim, V.B.; Böshme, J.; Vaitl, P.; Josten, C.; Anderson, I.A. An Efficient and Accurate Prediction of the Stability of Percutaneous Fixation of Acetabular Fractures with Finite Element Simulation. J. Biomech. Eng. 2011, 133, 094501. [Google Scholar] [CrossRef] [PubMed]
- Ruggiero, A.; Merola, M.; Affatato, S. Finite Element Simulations of Hard-On-Soft Hip Joint Prosthesis Accounting for Dynamic Loads Calculated from a Musculoskeletal Model during Walking. Materials (Basel) 2018, 11, 574. [Google Scholar] [CrossRef] [PubMed]
- Islan, M.; Blaya, F.; Pedro, P.S.; D’Amato, R.; Urquijo, E.L.; Juanes, J.A. Analysis and Fem Simulation Methodology of Dynamic Behavior of Human Rotator Cuff in Repetitive Routines: Musician Case Study. J. Med. Syst. 2018, 42, 55. [Google Scholar] [CrossRef] [PubMed]
- Islán Marcos, M.; Lechosa Urquijo, E.; Blaya Haro, F.; D’Amato, R.; Soriano Heras, E.; Juanes, J.A. Behavior under Load of A Human Shoulder: Finite Element Simulation and Analysis. J. Med. Syst. 2019, 43, 132. [Google Scholar] [CrossRef] [PubMed]
- Raut, P. Impact of mesh quality parameters on elements such as beam, shell and 3D solid in structural analysis. Int. J. Eng. Res. Appl. 2012, 2, 99–103. [Google Scholar]
- Tadepalli, S.C.; Erdemir, A.; Cavanagh, P.R. Comparison of hexahedral and tetrahedral elements in finite element analysis of the foot and footwear. J. Biomech. 2011, 44, 2337–2343. [Google Scholar] [CrossRef] [PubMed]
- Benzley, S.E.; Perry, E.; Merkley, K.; Clark, B.; Sjaardama, G. A comparison of all hexagonal and all tetrahedral finite element meshes for elastic and elasto-plastic analysis. In Proceedings of the 4th International Meshing Roundtable, Sandia National Laboratories, Albuquerque, NM, USA, 16–17 October 1995; pp. 179–191. [Google Scholar]
- Burkhart, T.A.; Andrews, D.M.; Dunning, C.E. Finite element modeling mesh quality, energy balance and validation methods: A review with recommendations associated with the modeling of bone tissue. J. Biomech. 2013, 46, 1477–1488. [Google Scholar] [CrossRef] [PubMed]
- ANSYS Meshing User’s Guide. Available online: https://www.ansys.com/products/platform/ansys-meshing (accessed on 18 May 2019).
- Rice, J.R. The Aspect Ratio Significant for Finite Element Problems; 85-535; Purdue University: West Lafayette, IN, USA, 1985. [Google Scholar]
- Felippa, C.A. Introduction to Finite Element Methods. Available online: https://vulcanhammernet.files.wordpress.com/2017/01/ifem.pdf (accessed on May 18 2019).
- Tsukcrman, I.; Plaks, A. Comparison of accuracy criteria for approximation of conservative fields on tetrahedra. IEEE Trans. Magn. 1998, 34, 3248–3251. [Google Scholar]
- Affatato, S.; Ruggiero, A.; De Mattia, J.S.; Taddei, P. Does metal transfer affect the tribological behaviour of femoral heads? Roughness and phase transformation analyses on retrieved zirconia and Biolox® Delta composites. Compos. Part B-Eng. 2016, 92, 290–298. [Google Scholar] [CrossRef]
- Ruggiero, A.; Merola, M.; Affatato, S. On the biotribology of total knee replacement: A new roughness measurements protocol on in vivo condyles considering the dynamic loading from musculoskeletal multibody model. Measurement 2017, 112, 22–28. [Google Scholar] [CrossRef]
- Lee, H.-H. Finite Element Simulations with ANSYS Workbench 14: Theory, Applications, Case Studies; Schroff Development Corp: Mission, KS, USA, 2012; ISBN 9781585037254. [Google Scholar]
- Affatato, S.; Ruggiero, A.; Jaber, S.A.; Merola, M.; Bracco, P. Wear behaviours and oxidation effects on different uhmwpe acetabular cups using a hip joint simulator. Materials (Basel) 2018, 11, 433. [Google Scholar] [CrossRef] [PubMed]
- Affatato, S.; Merola, M.; Ruggiero, A. Tribological performances of total knee prostheses: Roughness measurements on medial and lateral compartments of retrieved femoral components. Measurement 2019, 135, 341–347. [Google Scholar] [CrossRef]
- Affatato, S.; Ruggiero, A. A Critical Analysis of TKR In Vitro Wear Tests Considering Predicted Knee Joint Loads. Materials 2019, 12, 1597. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cup Mesh | Head Mesh | Mesh Number |
|---|---|---|
| Automatic mesh | 1 | |
| Tetra patch conforming | 2 | |
| Tetra patch independent | 3 | |
| Hex dominant quad/tri | 4 | |
| Hex dominant all quad | All Quad Head | 5 |
| Multizone hexa/prism tetra | 6 | |
| Multizone hexa/prism hexa dominant | 7 | |
| Multizone hexa/prism hexa core | 8 | |
| Multizone hexa/prism tetra prism | 9 | |
| Tetra patch-conforming head tri | 10 | |
| Hex-dominant quad/tri | Triangular Head | 11 |
| Multizone hexa/prism tetra | 12 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruggiero, A.; D’Amato, R.; Affatato, S. Comparison of Meshing Strategies in THR Finite Element Modelling. Materials 2019, 12, 2332. https://doi.org/10.3390/ma12142332
Ruggiero A, D’Amato R, Affatato S. Comparison of Meshing Strategies in THR Finite Element Modelling. Materials. 2019; 12(14):2332. https://doi.org/10.3390/ma12142332
Chicago/Turabian StyleRuggiero, Alessandro, Roberto D’Amato, and Saverio Affatato. 2019. "Comparison of Meshing Strategies in THR Finite Element Modelling" Materials 12, no. 14: 2332. https://doi.org/10.3390/ma12142332
APA StyleRuggiero, A., D’Amato, R., & Affatato, S. (2019). Comparison of Meshing Strategies in THR Finite Element Modelling. Materials, 12(14), 2332. https://doi.org/10.3390/ma12142332