Analysis and Modelling of Non-Fourier Heat Behavior Using the Wavelet Finite Element Method


Abstract
:1. Introduction
2. Problem Descriptions
2.1. Cattaneo–Vernotte Model (CV Model)
2.2. Dual-Phase-Lagging Model (DPL Model)
2.3. The Dimensionless Formulation
3. Numerical Model
3.1. Wavelet Interpolating/Shape Function
3.2. WFEM Formulation
3.3. Solving Methodology
3.4. Definition of Boudary Condition and Initial Condition
3.5. Stability Conditions of Central Difference Time Integration
4. Numerical Results and Discussions
- (1)
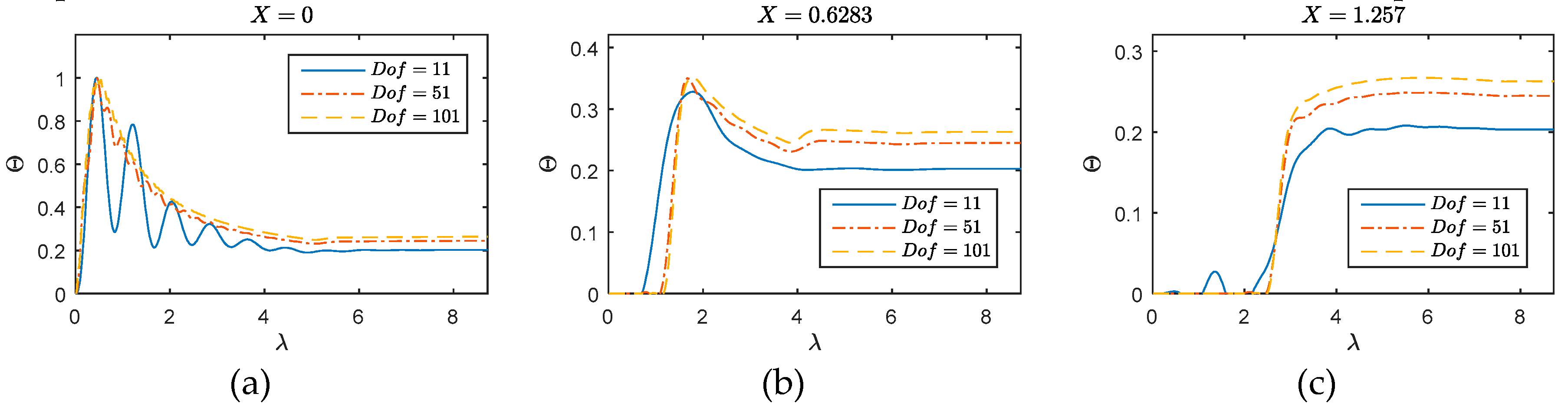
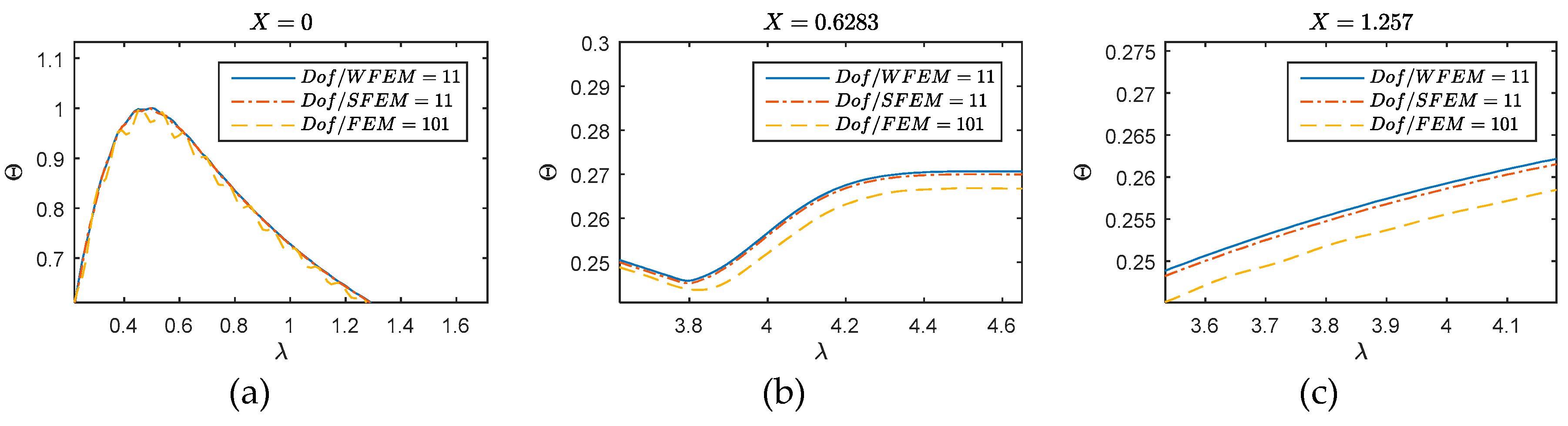
- Validate the convergence and accuracy of the presented WFEM method by comparing with the time domain spectral finite element method (SFEM) proposed by Ostachowicz and Kudela et al. [53], one of the best methods for the dynamic analysis, and the classical FEM. The comparisons about convergence and accuracy are conducted on one-dimensional structures. These methods are all coded by Matlab in the similar program structure. It should be mentioned that although the time consumption can be obtained by “tic, toc” in Matlab and the similar program structure are used, we do not compare the efficiency by time, however, by DOFs used.
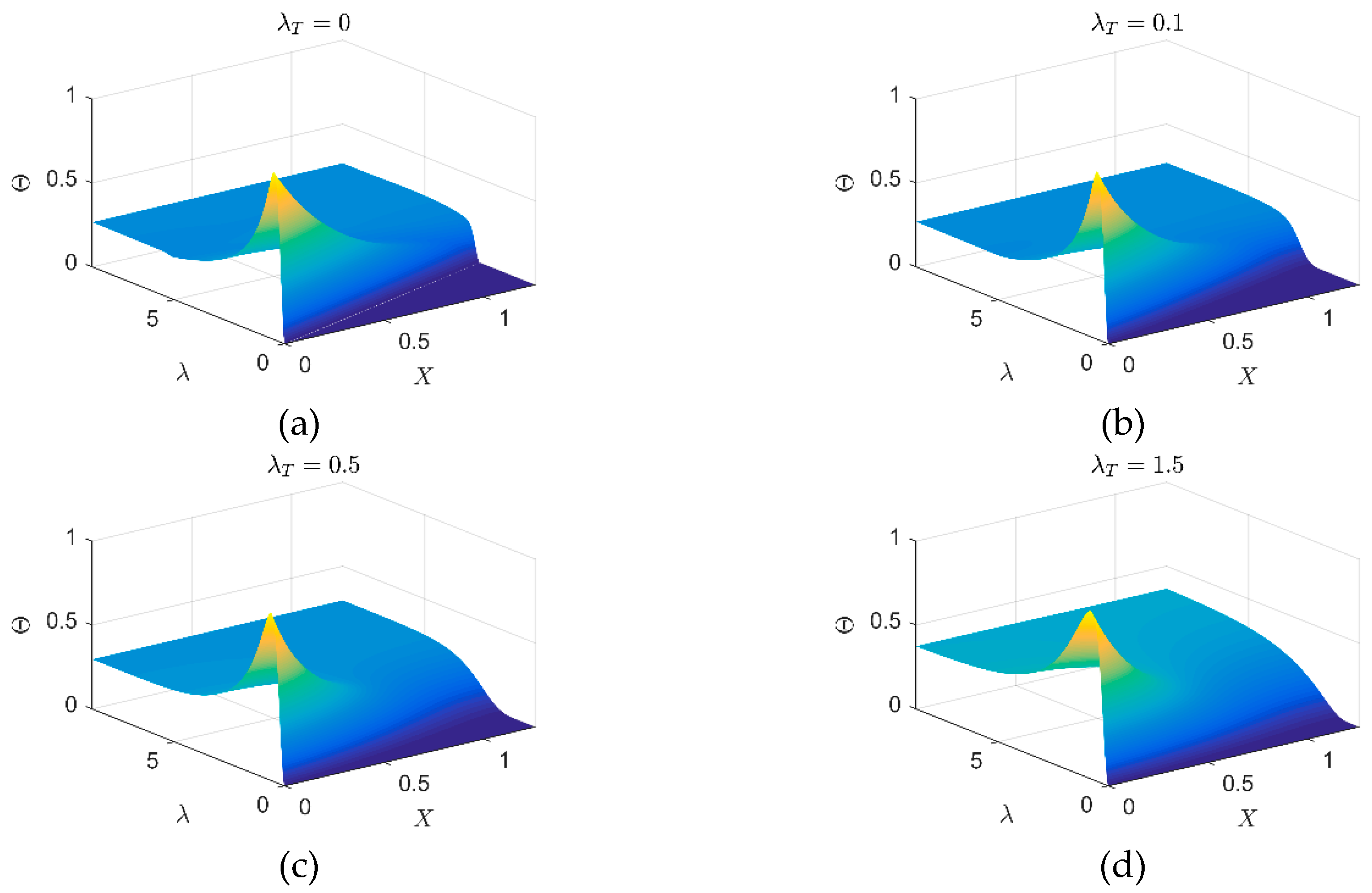
- (2)
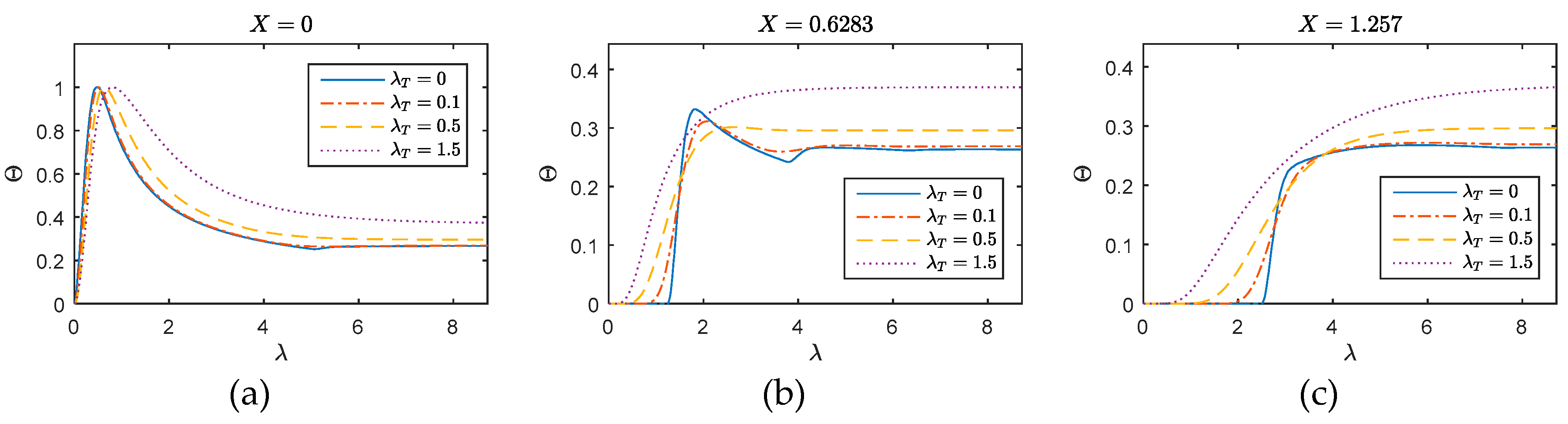
- Different behaviors of the inspected systems are performed using the developed model, containing the wavy behavior (), the wavelike behavior (), the diffusive behavior (), and the over-diffusive behavior (). On this aspect, the applicability of the proposed model in different situations can be verified.
- (3)
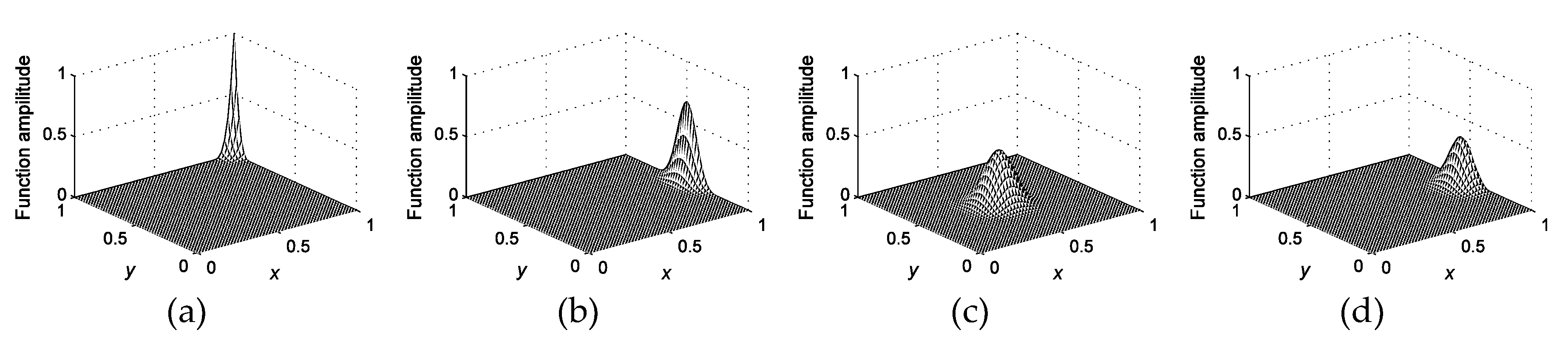
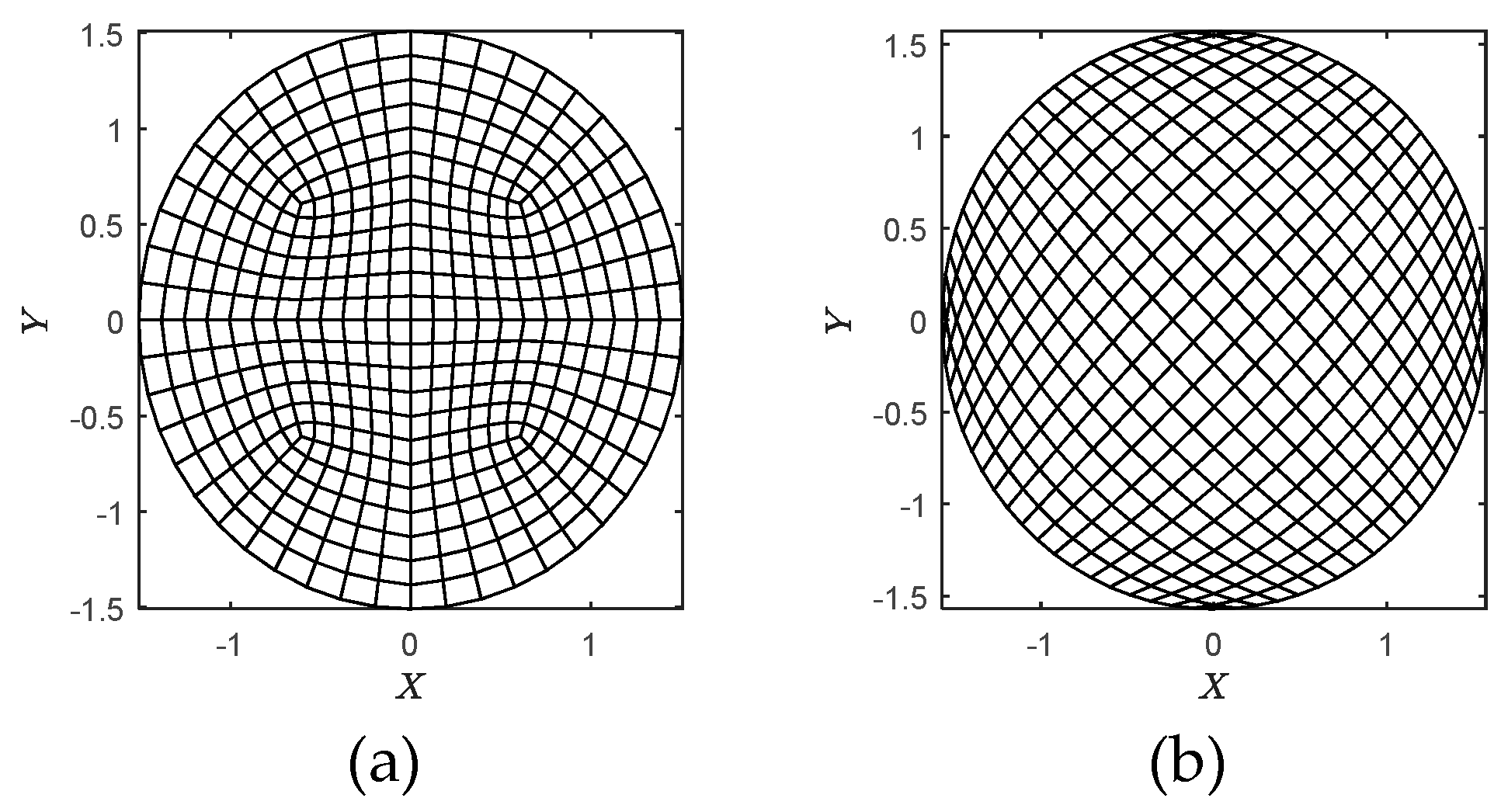
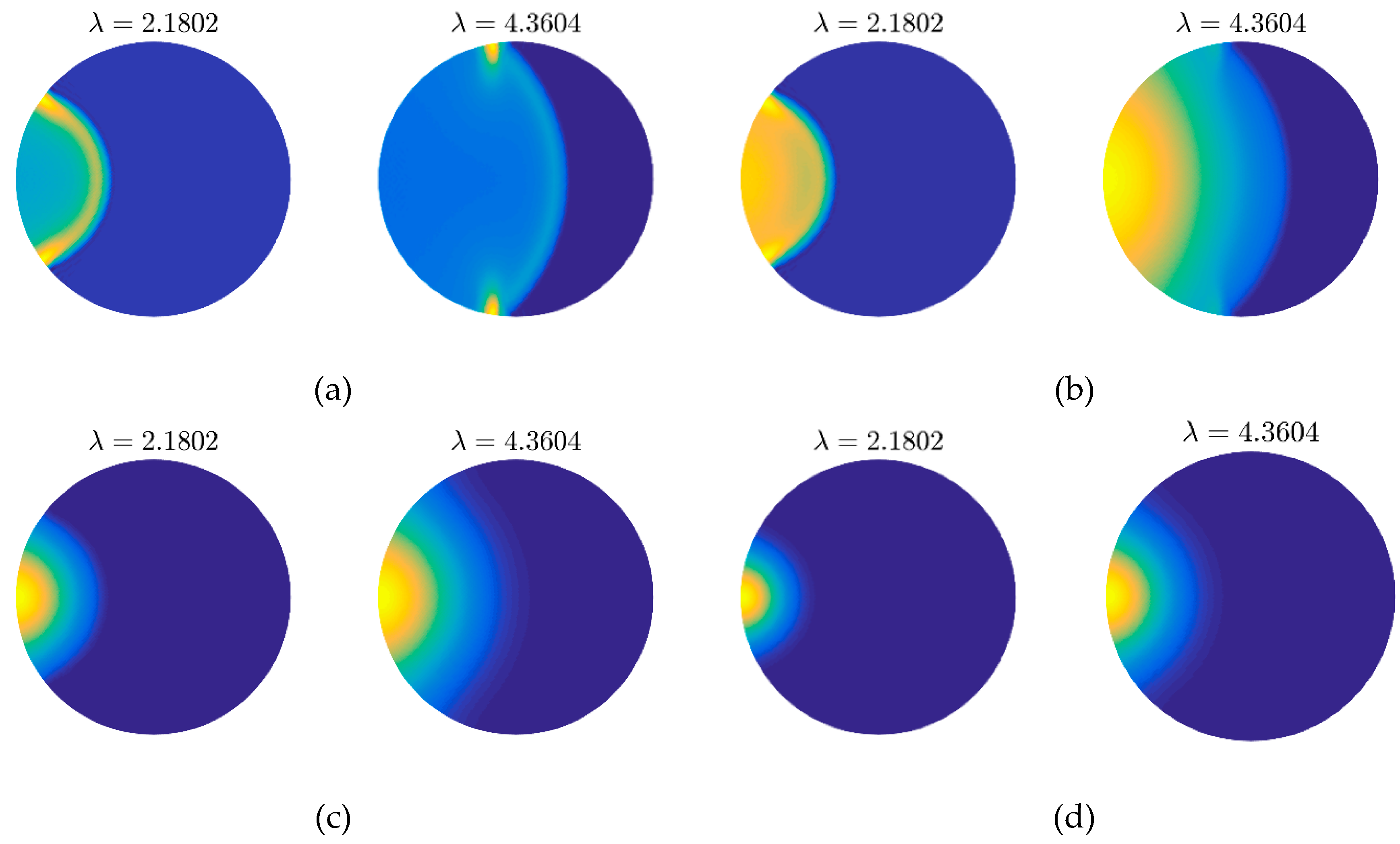
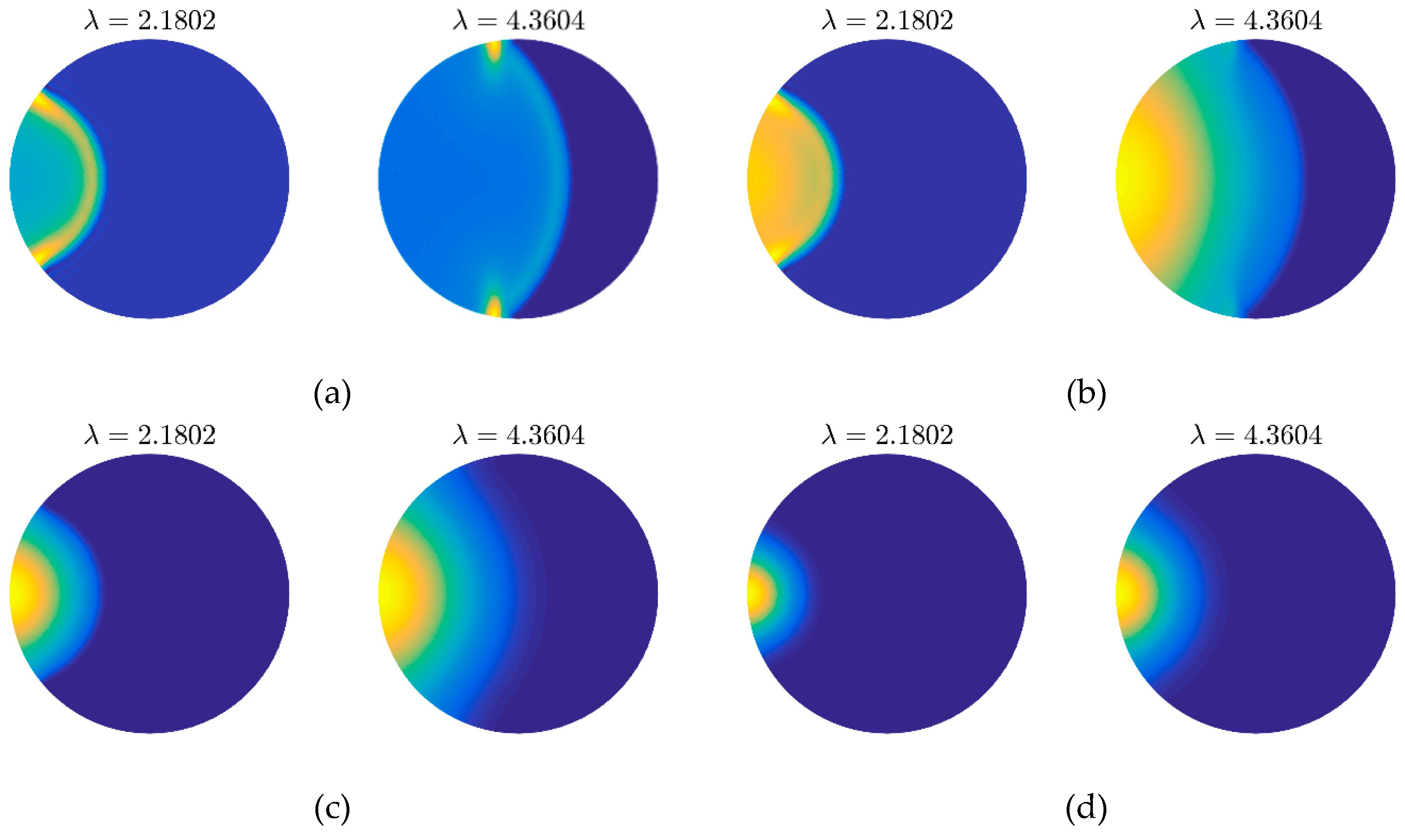
- Considering the simplicity of one-dimensional grids, the flexibility and applicability of the presented method are validated by comparisons on two-dimensional grids.
4.1. Convergence and Accuracy
4.2. Flexibility and Applicability
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Joseph, D.D.; Preziosi, L. Heat waves. Rev. Mod. Phys. 1989, 61, 41. [Google Scholar] [CrossRef]
- Tzou, D.Y. Macro-to Microscale Heat Transfer: The Lagging Behavior; John Wiley & Sons: London, UK, 2014. [Google Scholar]
- Tzou, D.Y. The generalized lagging response in small-scale and high-rate heating. Int. J. Heat Mass Transf. 1995, 38, 3231–3240. [Google Scholar] [CrossRef]
- Xu, M.; Wang, L. Thermal oscillation and resonance in dual-phase-lagging heat conduction. Int. J. Heat Mass Transf. 2002, 45, 1055–1061. [Google Scholar] [CrossRef]
- Tang, D.; Araki, N. Wavy, wavelike, diffusive thermal responses of finite rigid slabs to high-speed heating of laser-pulses. Int. J. Heat Mass Transf. 1999, 42, 855–860. [Google Scholar] [CrossRef]
- Tzou, D.Y. Experimental support for the lagging behavior in heat propagation. J. Thermophys. Heat Transf. 1995, 9, 686–693. [Google Scholar] [CrossRef]
- Rukolaine, S.A. Unphysical effects of the dual-phase-lag model of heat conduction: Higher-order approximations. Int. J. Thermal Sci. 2017, 113, 83–88. [Google Scholar] [CrossRef]
- Rukolaine, S.A. Unphysical effects of the dual-phase-lag model of heat conduction. Int. J. Heat Mass Transf. 2014, 78, 58–63. [Google Scholar] [CrossRef]
- Rukolaine, S.A.; Samsonov, A.M.J.P.R.E. Local immobilization of particles in mass transfer described by a Jeffreys-type equation. Phys. Rev. E Stat. Nonlin. Soft Matter Phys. 2013, 88, 062116. [Google Scholar] [CrossRef]
- Rukolaine, S.A.; Samsonov, A.M. A model of diffusion, based on the equation of the Jeffreys type. In Proceedings of the International Conference Days on Diffraction 2013, St. Petersburg, Russia, 27–31 May 2013. [Google Scholar]
- Wang, L.; Zhou, X.; Wei, X. Heat Conduction: Mathematical Models and Analytical Solutions; Springer: Berlin, Germany, 2007. [Google Scholar]
- Zhang, S.; Dai, W.; Wang, H.; Melnik, R.V.N. A finite difference method for studying thermal deformation in a 3D thin film exposed to ultrashort pulsed lasers. Int. J. Heat Mass Transf. 2008, 51, 1979–1995. [Google Scholar] [CrossRef]
- Du, X.; Dai, W.; Wang, P. A finite-difference method for studying thermal deformation in a 3-D microsphere exposed to ultrashort pulsed lasers. Numer. Heat Transf. Part A Appl. 2007, 53, 457–484. [Google Scholar] [CrossRef]
- Lu, W.-Q.; Liu, J.; Zeng, Y. Simulation of the thermal wave propagation in biological tissues by the dual reciprocity boundary element method. Eng. Anal. Bound. Elem. 1998, 22, 167–174. [Google Scholar] [CrossRef]
- Hosseini-Tehrani, P.; Eslami, M. BEM analysis of thermal and mechanical shock in a two-dimensional finite domain considering coupled thermoelasticity. Eng. Anal. Bound. Elem. 2000, 24, 249–257. [Google Scholar] [CrossRef]
- Liu, K.-C.; Cheng, P.-J.; Wang, Y.-N. Analysis of non-Fourier thermal behaviour for multi-layer skin model. Therm. Sci. 2011, 15, 61. [Google Scholar]
- Mandelis, A. Diffusion-Wave Fields: Mathematical Methods and Green Functions; Springer: Berlin, Germany, 2013. [Google Scholar]
- Wu, C.-Y. Integral equation solution for hyperbolic heat conduction with surface radiation. Int. Commun. Heat Mass Transf. 1988, 15, 365–374. [Google Scholar] [CrossRef]
- Tornabene, F.; Fantuzzi, N.; Bacciocchi, M. Linear Static Behavior of Damaged Laminated Composite Plates and Shells. Materials 2017, 10, 811. [Google Scholar] [CrossRef] [PubMed]
- Tornabene, F.; Fantuzzi, N.; Bacciocchi, M.; Viola, E.; Reddy, J.N. A Numerical Investigation on the Natural Frequencies of FGM Sandwich Shells with Variable Thickness by the Local Generalized Differential Quadrature Method. Appli. Sci. 2017, 7, 131. [Google Scholar] [CrossRef]
- Lam, T.T.; Yeung, W.K. A numerical scheme for non-Fourier heat conduction, part II: two-dimensional problem formulation and verification. Numer. Heat Transf. Part B Fundam. 2002, 41, 543–564. [Google Scholar] [CrossRef]
- Yeung, W.K.; Lam, T.T. A numerical scheme for non-Fourier heat conduction, part I: one-dimensional problem formulation and applications. Numer. Heat Transf. 1998, 33, 215–233. [Google Scholar] [CrossRef]
- Han, P.; Tang, D.; Zhou, L. Numerical analysis of two-dimensional lagging thermal behavior under short-pulse-laser heating on surface. Int. J. Eng. Sci. 2006, 44, 1510–1519. [Google Scholar] [CrossRef]
- Dai, W.; Shen, L.; Nassar, R. A convergent three-level finite difference scheme for solving a dual-phase-lagging heat transport equation in spherical coordinates. Numer. Methods Partial Differ. Equ. An Int. J. 2004, 20, 60–71. [Google Scholar] [CrossRef]
- Sun, H.; Du, R.; Dai, W.; Sun, Z. A high order accurate numerical method for solving two-dimensional dual-phase-lagging equation with temperature jump boundary condition in nanoheat conduction. Numer. Methods Partial Differ. Equ. 2015, 31, 1742–1768. [Google Scholar] [CrossRef]
- Wang, D.; Qu, Z.; Ma, Y. An enhanced Gray model for nondiffusive heat conduction solved by implicit lattice Boltzmann method. Int. J. Heat Mass Transf. 2016, 94, 411–418. [Google Scholar] [CrossRef]
- Xu, M.; Wang, L. Dual-phase-lagging heat conduction based on Boltzmann transport equation. Int. J. Heat Mass Transf. 2005, 48, 5616–5624. [Google Scholar] [CrossRef]
- Cheng, L.; Xu, M.; Wang, L. From Boltzmann transport equation to single-phase-lagging heat conduction. Int. J. Heat Mass Transf. 2008, 51, 6018–6023. [Google Scholar] [CrossRef]
- Ai, X.; Li, B. A discontinuous finite element method for hyperbolic thermal wave problems. Eng. Comput. 2004, 21, 577–597. [Google Scholar] [CrossRef]
- Ai, X.; Li, B. Numerical simulation of thermal wave propagation during laser processing of thin films. J. Electron. Mater. 2005, 34, 583–591. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, X.; He, Y.; He, Z. The construction of plane elastomechanics and Mindlin plate elements of B-spline wavelet on the interval. Finite Elem. Anal. Des. 2006, 42, 1269–1280. [Google Scholar] [CrossRef]
- Xiang, J.; Chen, X.; Mo, Q.; He, Z. Identification of crack in a rotor system based on wavelet finite element method. Finite Elem. Anal. Des. 2007, 43, 1068–1081. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, X.; He, Y.; He, Z.; Zhang, J. The Analysis of Curved Beam Using B-Spline Wavelet on Interval Finite Element Method. Shock Vib. 2014, 2014. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, X.; Li, X.; Jiang, Y.; Miao, H.; He, Z. Wave motion analysis in arch structures via wavelet finite element method. J. Sound Vib. 2014, 333, 446–469. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, X.; Zhang, X.; He, Z. Free vibration and buckling analysis of plates using B-spline wavelet on the interval Mindlin element. Appl. Math. Model. 2013, 37, 3449–3466. [Google Scholar] [CrossRef]
- Zuo, H.; Yang, Z.; Chen, X.; Xie, Y.; Miao, H. Analysis of laminated composite plates using wavelet finite element method and higher-order plate theory. Compos. Struct. 2015, 131, 248–258. [Google Scholar] [CrossRef]
- Zhao, B. Temperature-coupled field analysis of LPG tank under fire based on wavelet finite element method. J. Therm. Anal. Calorim. 2014, 117, 413–422. [Google Scholar] [CrossRef]
- Tisza, L. The thermal superconductivity of helium II and the statistics of Bose-Einstein. Compt. Rend 1938, 207, 1035–1037. [Google Scholar]
- Peshkov, V. The Second Sound in Helium II. J. Phys. 1944, 8, 381–382. [Google Scholar]
- Chiriţă, S.; Ciarletta, M.; Tibullo, V. On the thermomechanical consistency of the time differential dual-phase-lag models of heat conduction. Int. J. Heat Mass Transf. 2017, 114, 277–285. [Google Scholar] [CrossRef]
- Chiriţă, S. On the time differential dual-phase-lag thermoelastic model. Meccanica 2017, 52, 349–361. [Google Scholar] [CrossRef]
- Chiriţă, S.; Ciarletta, M.; Tibullo, V. Qualitative properties of solutions in the time differential dual-phase-lag model of heat conduction. Appl. Math. Model. 2017, 50, 380–393. [Google Scholar] [CrossRef]
- Chiriţă, S.; Ciarletta, M.; Tibullo, V. On the wave propagation in the time differential dual-phase-lag thermoelastic model. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150400. [Google Scholar] [CrossRef]
- Goswami, J.C.; Chan, A.K.; Chui, C.K. On Solving First-Kind Integral-Equations Using Wavelets on a Bounded Interval. IEEE Trans. Antennas Propag. 1995, 43, 614–622. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Taylor, R.L.; Zhu, J.Z. The Finite Element Method: Its Basis and Fundamentals; Butterworth-Heinemann: London, UK, 2005; Volume 1. [Google Scholar]
- Ostachowicz, W.M.; Güemes, A. New Trends in Structural Health Monitoring; Springer: Berlin, Germany, 2013. [Google Scholar]
- Ván, P.; Berezovski, A.; Fülöp, T.; Gróf, G.Y.; Kovács, R.; Lovas, Á.; Verhás, J. Guyer-Krumhansl–type heat conduction at room temperature. EPL 2017, 118, 50005. [Google Scholar]
- Both, S.; Czél, B.; Fülöp, T.; Gróf, G.Y.; Gyenis, Á.; Kovács, R.; Ván, P.; Verhás, J. Deviation from the Fourier law in room-temperature heat pulse experiments. J. Non-Equilib. Thermodyn. 2016, 41, 41–48. [Google Scholar] [CrossRef]
- Kovács, R.; Ván, P. Models of ballistic propagation of heat at low temperatures. Int. J. Thermophys. 2016, 37, 95. [Google Scholar] [CrossRef]
- Kovács, R.; Ván, P. Generalized heat conduction in heat pulse experiments. Int. J. Heat Mass Transf. 2015, 83, 613–620. [Google Scholar] [CrossRef]
- Hofer, M.; Finger, N.; Kovacs, G.; Schoberl, J.; Zaglmayr, S.; Langer, U.; Lerch, R. Finite-element simulation of wave propagation in periodic piezoelectric SAW structures. IEEE Trans. Ultrason. Ferroelectrics Freq. Control 2006, 53, 1192–1201. [Google Scholar] [CrossRef]
- Rieth, A.; Kovács, R.; Fülöp, T. Implicit numerical schemes for generalized heat conduction equations. Int. J. Heat Mass Transf. 2018, 126, 1177–1182. [Google Scholar] [CrossRef]
- Kudela, P.; Krawczuk, M.; Ostachowicz, W. Wave propagation modelling in 1D structures using spectral finite elements. J. Sound Vib. 2007, 300, 88–100. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Algorithm |
|---|
| #1 Loop over elements e Calculate the elemental matrices Ke, Me, and Ce Assemble matrices M, C, vector G Store every elemental stiffness matrix K #1 End of loop over element e Calculate the auxiliary vectors , , and Apply the initial condition #2 Loop over time instants #21 Loop over elements e Load the stiffness matrix Ke Calculate on elemental level Assemble vector by #21 End of loop over elements e Calculate effective vector Calculate #2 End of loop over time instants . |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.-B.; Wang, Z.-K.; Tian, S.-H.; Chen, X.-F. Analysis and Modelling of Non-Fourier Heat Behavior Using the Wavelet Finite Element Method. Materials 2019, 12, 1337. https://doi.org/10.3390/ma12081337
Yang Z-B, Wang Z-K, Tian S-H, Chen X-F. Analysis and Modelling of Non-Fourier Heat Behavior Using the Wavelet Finite Element Method. Materials. 2019; 12(8):1337. https://doi.org/10.3390/ma12081337
Chicago/Turabian StyleYang, Zhi-Bo, Zeng-Kun Wang, Shao-Hua Tian, and Xue-Feng Chen. 2019. "Analysis and Modelling of Non-Fourier Heat Behavior Using the Wavelet Finite Element Method" Materials 12, no. 8: 1337. https://doi.org/10.3390/ma12081337
APA StyleYang, Z. -B., Wang, Z. -K., Tian, S. -H., & Chen, X. -F. (2019). Analysis and Modelling of Non-Fourier Heat Behavior Using the Wavelet Finite Element Method. Materials, 12(8), 1337. https://doi.org/10.3390/ma12081337