2.1. Fluid–Solid Coupling Model
When solving fluid–solid coupling problems, the virtual mass method has the advantages of high solution precision and small calculation load. In this study, the virtual mass method was used to study the effects of mutual coupling between fuel and specimens in fuel tanks. With the consumption of fuel, the total mass of the fuel tank of a diesel locomotive is continuously reduced, and the natural frequency constantly changes. If the frequency of the fuel tank is close to the excitation frequency of the engine and the motor, resonance will occur.
The calculation of natural frequency and vibration mode is a typical eigenvalue problem. The eigenvalue corresponds to the natural frequency, and the eigenvector corresponds to the vibration mode. The typical forced vibration equation with N degrees of freedom is [
1]:
In Equation (1), [M] is a mass matrix, [C] is a damping matrix, [K] is a stiffness matrix, F is the external load, and {u} is a displacement vector.
If the equation ignores the effects of damping and external load, assuming that the deformation of the fuel tank is within the linear elastic range of the material, the equation becomes [
21]:
A simple harmonic excitation as shown in Equation (3) is applied to the specimen in the fuel tank:
In Equation (3), ϕ is an amplitude vector of the simple harmonic excitation, ω is the frequency, and t is time.
Under the action of simple harmonic excitation, the specimens and fuel in the fuel tank are subjected to acceleration, and the specimens in the fuel medium are more accelerated than the specimens in the air medium:
In Equation (4), is the mass of the fuel attached to the specimens in the fuel tank.
The core of the virtual mass method is to achieve the effect of an incompressible fluid on the structure by introducing an attached mass and stiffness matrix in Equation (2). The finite element calculation equation for the vibration mode of the structure in the fuel medium is [
14,
15,
16,
18]:
In Equation (5), MA is the attached mass matrix produced by the fluid to the structure, with and u as the acceleration and displacement vectors, respectively.
Substitution of Equation (3) into Equation (5) yields:
As Equation (6) holds at any time, one obtains:
The prerequisite for Equation (7) to have a non-zero solution is that the characteristic determinant is zero:
A series of eigenvalues
ωi can be obtained from Equation (8), each corresponding to an eigenvector
satisfying Equation (7). Each eigenvalue and the corresponding eigenvector satisfy Equation (9), wherein the eigenvalue corresponds to a natural frequency, and the eigenvector corresponds to a vibration mode [
22]:
As shown by Equation (5), on the one hand, the attached mass matrix changes with the state of the fluid, and the vibration of the structure is a state function of the fluid flow; on the other hand, the vibration of the structure affects the fluid flow state through boundary deformation, and the fluid and fuel tank form a closed fluid–solid coupling system. As the stiffness KA imposed by the fluid on the fuel tank is small relative to the stiffness of the fuel tank itself, it can be ignored. Consequently, the attached mass matrix MA is the main research object.
The following three assumptions are made to solve the equation of attached mass matrix
MA [
15,
18]:
The liquid is an isotropic, incompressible, non-viscous liquid;
The influence of gravity on the surface of the structure can be ignored;
The motion speed of the structure is very low.
According to the continuity, motion, and energy equations of fluid mechanics, assuming that
and
are, respectively, the fluid velocity and fluid acceleration calculated via the boundary element method at point r
j (a virtual source) on the boundary of the fluid domain, the flow velocity
and pressure
pi at another position
ri on the boundary of the fluid are expressed, respectively, by Equations (10) and (11) [
23]:
In Equations (10) and (11), is the velocity vector at any node; Aj is the area of a microelement on the surface of the structure; is the flow velocity vector at node j; eij is the unit vector from node j to node i; pi is the pressure on an arbitrary surface Aj; is the fluid density.
Integration of Equations (10) and (11) yields Equations (12) and (13) [
24]:
where
and
are integral coefficient matrices;
F is the force exerted by the fluid on the structure.
According to Newton’s second law, Equations (12) and (13) can be converted into Equation (14):
namely:
According to Equation (15), the attached mass matrix MA can be obtained, which is substituted in Equation (5) to solve the equation for eigenvalues and eigenvectors, which are the natural frequencies and vibration modes of the fluid–solid coupling system, respectively.
2.2. Model Validation
Frequency sweep tests were performed on a small-scale fuel-tank model of a diesel locomotive with different fuel levels. The test results were compared with the simulation results obtained based on the virtual mass method to verify the validity of the fluid–solid coupling model.
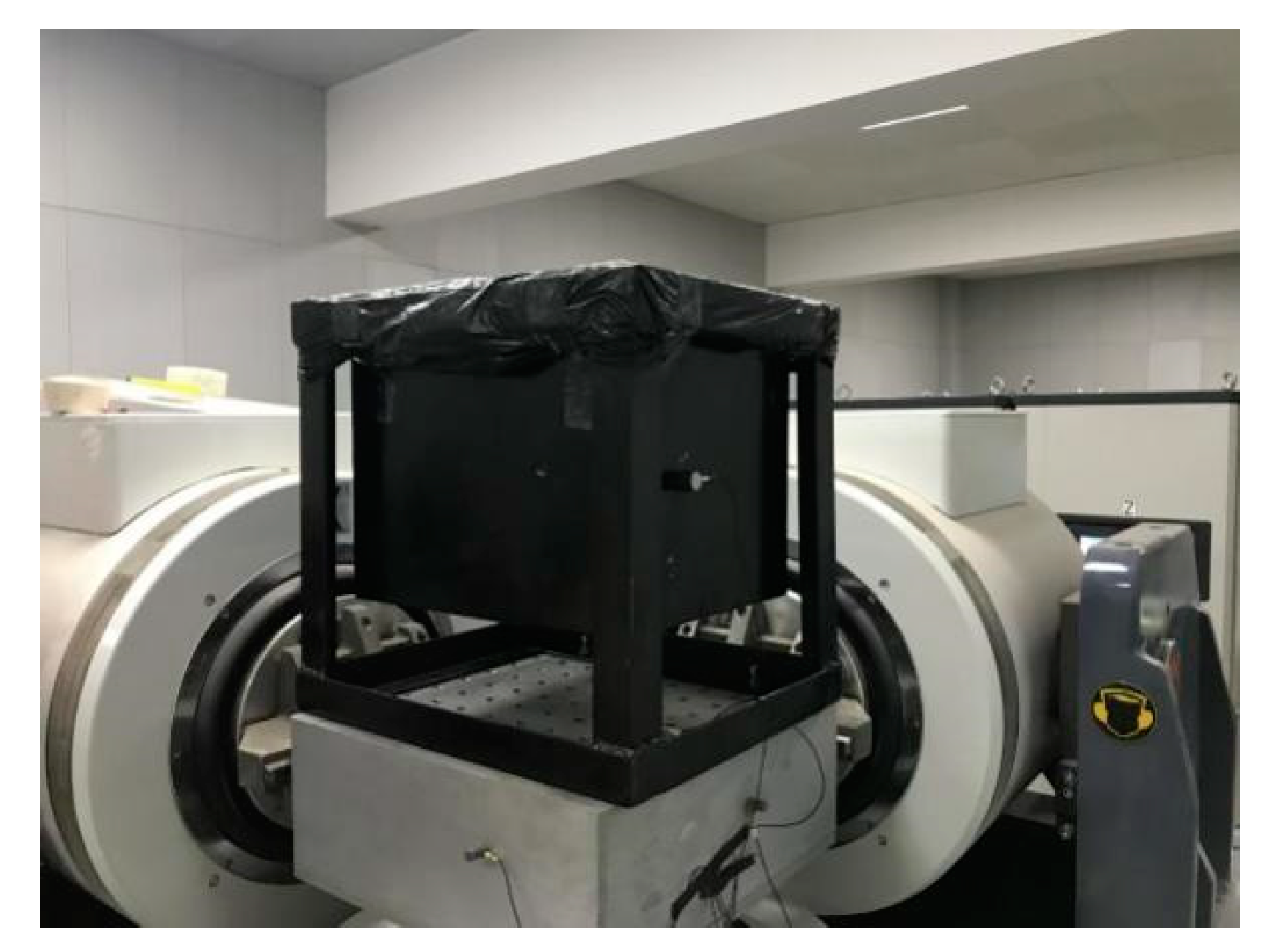
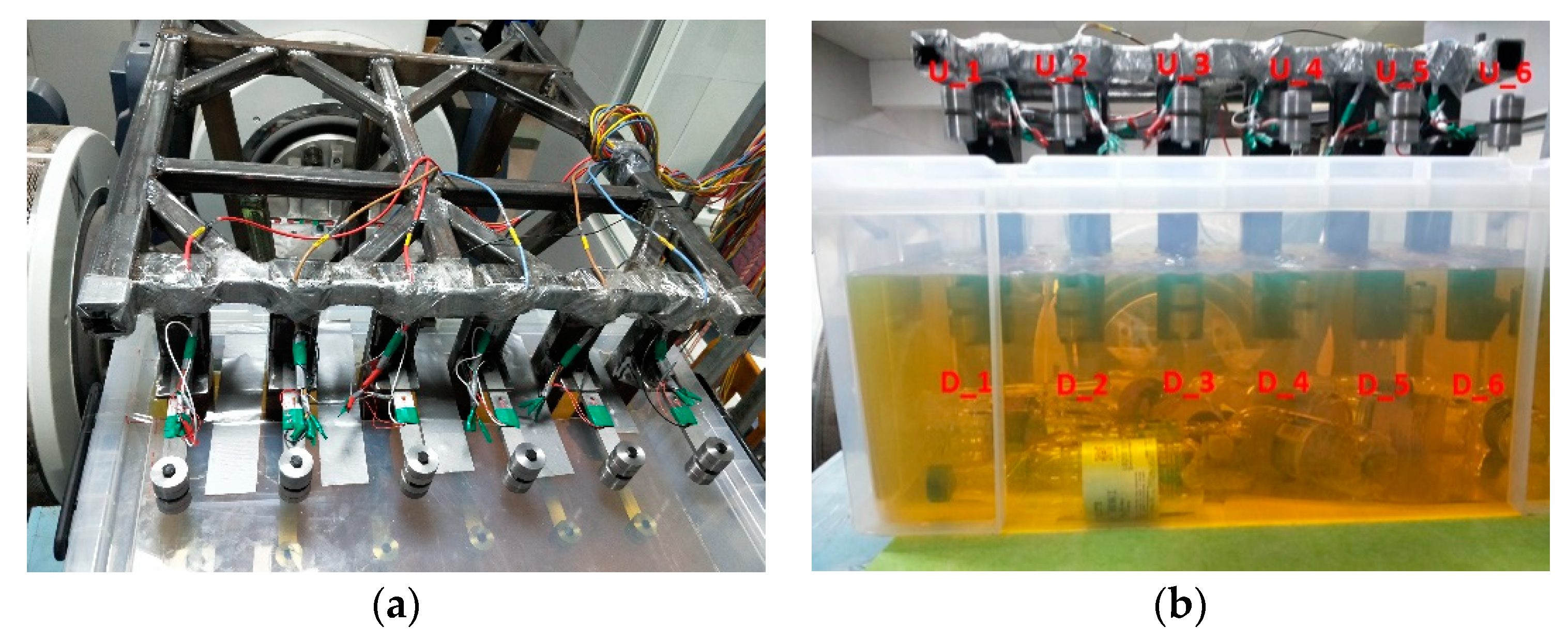
The small-scale fuel-tank model was installed on a multi-axial synchronous vibration platform for a sinusoidal frequency sweep test. The test platform and model installation are shown in
Figure 2.
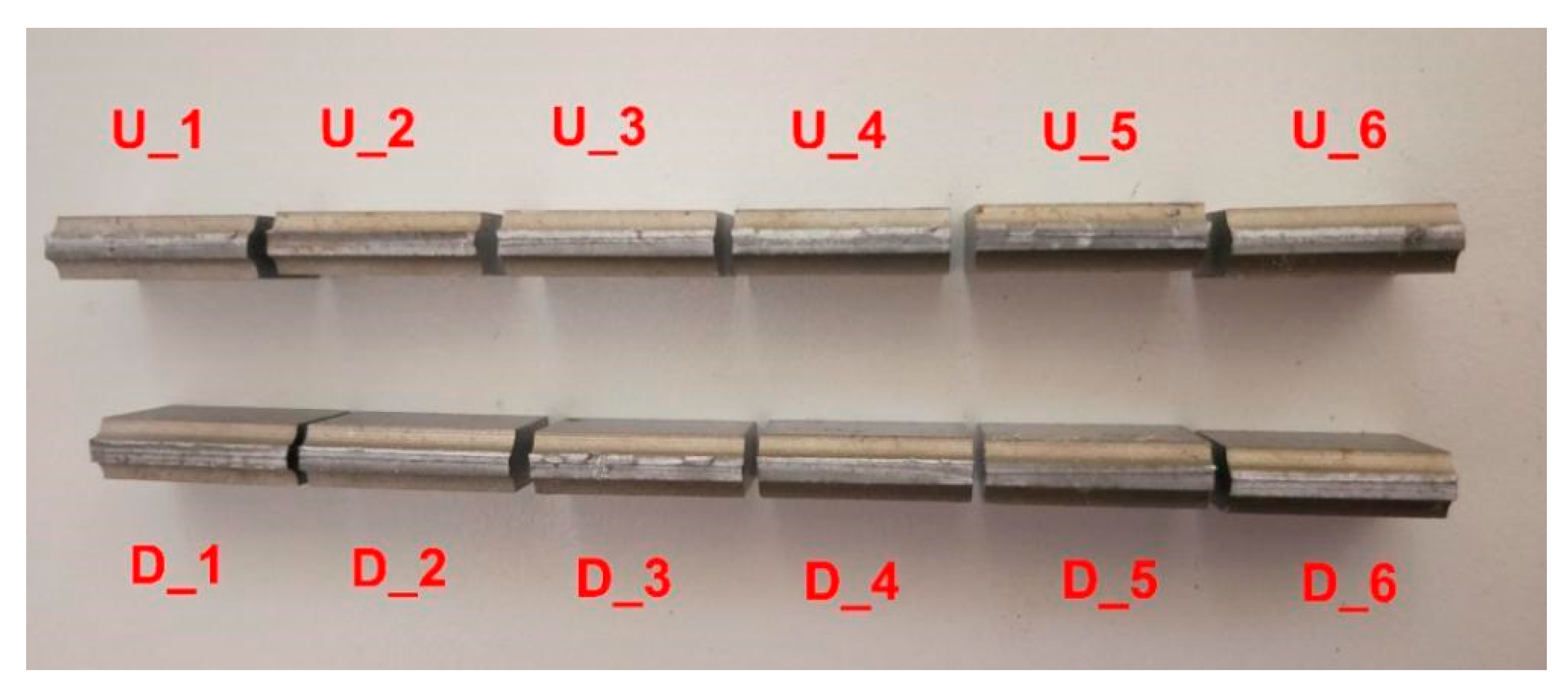
Acceleration sensors were arranged on the two side plates and the bottom plate of the model. The lower and upper frequency limits of the sweep test were set to 5 Hz and 160 Hz in the vibration control system, respectively, with the sweep rate set to 1 oct/min.
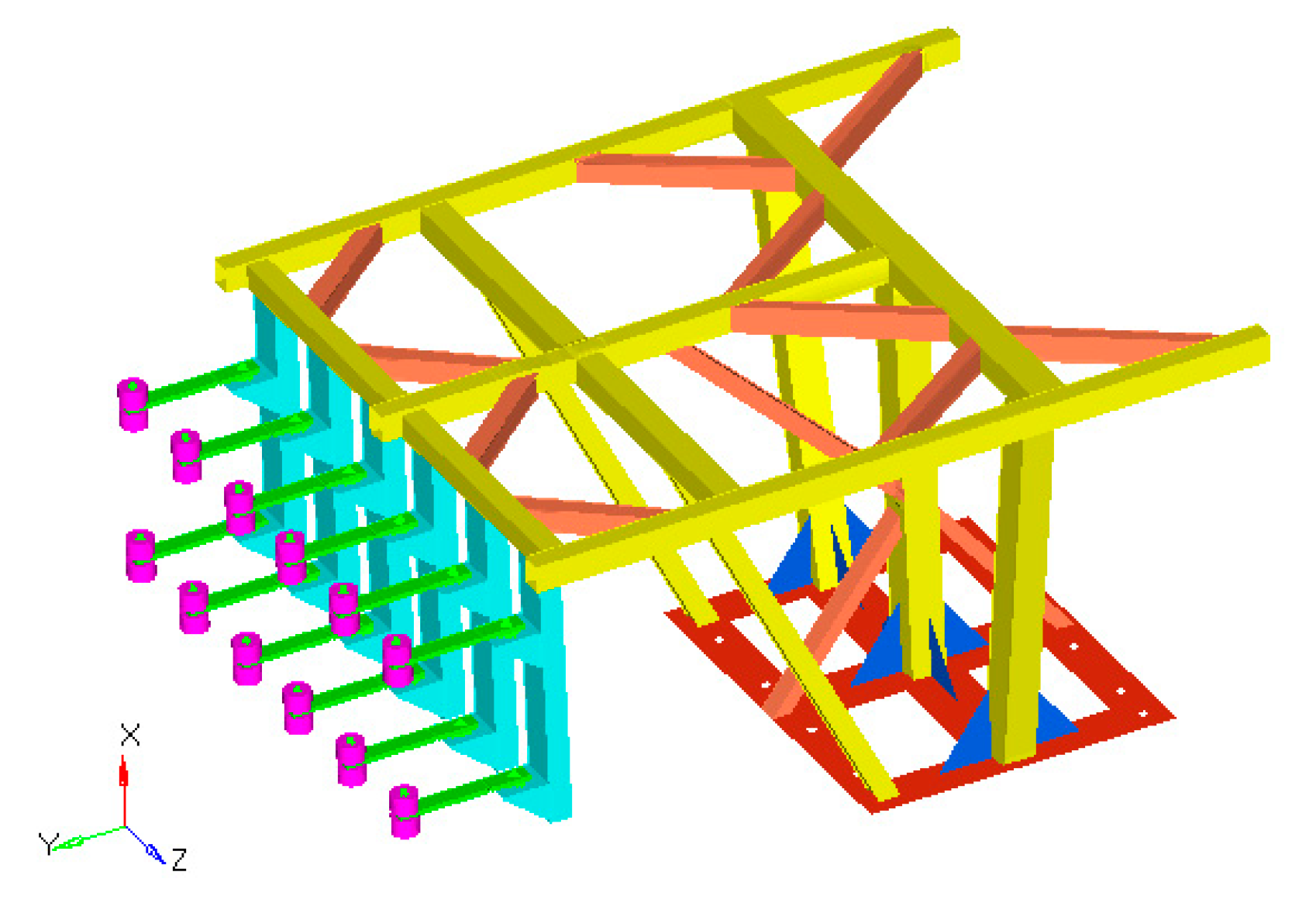
The small-scale fuel-tank model was subjected to a sinusoidal frequency sweep test at 0/4, 1/4, 2/4, 3/4, and 4/4 of the full fuel level, which provided the first-order resonance frequency at each fuel level. When using the virtual mass method to simulate fluid–solid coupling of the small-scale fuel-tank model, the first step was to establish a local coordinate system at the bottom of the tank, and the second step was to define the fluid characteristics and the characteristics of fluid–solid coupling elements by modifying the MFLUID and ELIST control cards in the Msc Nastran 2010 software. The MFLUID and ELIST control cards can set the numbers of the continuous wetted elements, attribute and depth of the fluid. For example, ZFS defines the depth of the fluid, RHO defines the density of a fluid, E1 represents the number of the initial wetted elements and E3 represents the number of the terminal wetted elements. The parameters of the MFLUID and ELIST control cards are shown in
Table 1.
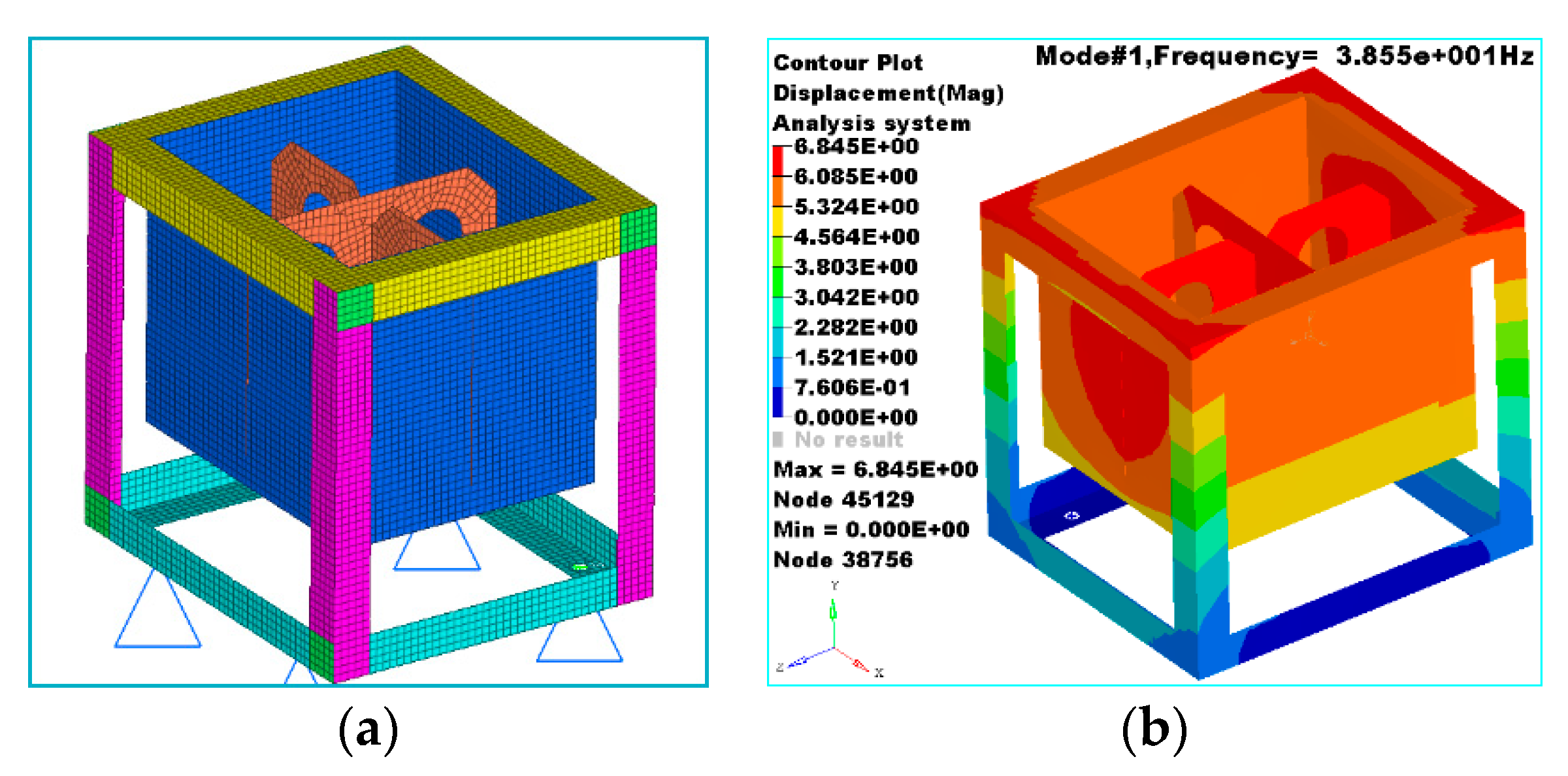
The small-scale fuel-tank finite element model and its modes at 1/4 of the full fuel level are shown in
Figure 3a,b.
The results of the frequency sweep test of the small-scale fuel-tank model and the modal simulation results based on the virtual mass method are shown in
Table 2.
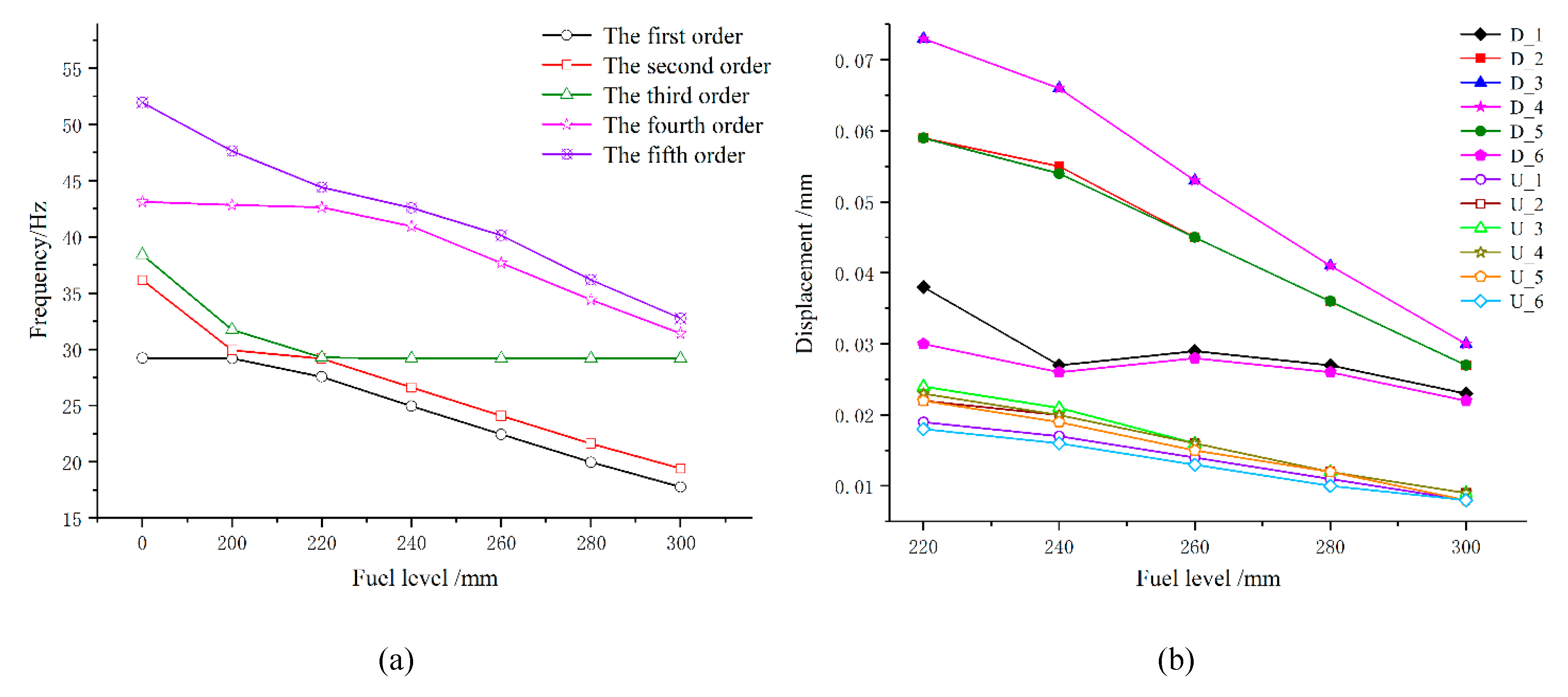
The results show that, with the increase in fuel height, the first-order frequency gradually decreased, which was attributed to the fact that the fluid mass was treated as the attached mass MA and absorbed in the mass matrix in the calculation. As shown by Equation (8), with the increase in MA, the eigenvalue ωi decreased gradually, that is, the natural frequency of the system gradually decreased. The test and simulation results are consistent with the theoretical solution of the fluid–solid coupling model.
The simulation results of the fluid–solid coupling model based on the virtual mass method are very close to those of the frequency sweep test, showing a maximum relative deviation of only 5.73%. This indicates that it is feasible to conduct fluid–solid coupling simulation based on the virtual mass method, thereby verifying the accuracy of the model. The virtual mass method greatly reduces the difficulty of modeling because it does not need to establish fluid grid cells, thereby making it more suitable for the fluid–solid coupling simulation of large fuel tanks, such as those of diesel locomotives, airplanes, and ships.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}