2.2. MWSSR Samples and Experimental Testing Cases
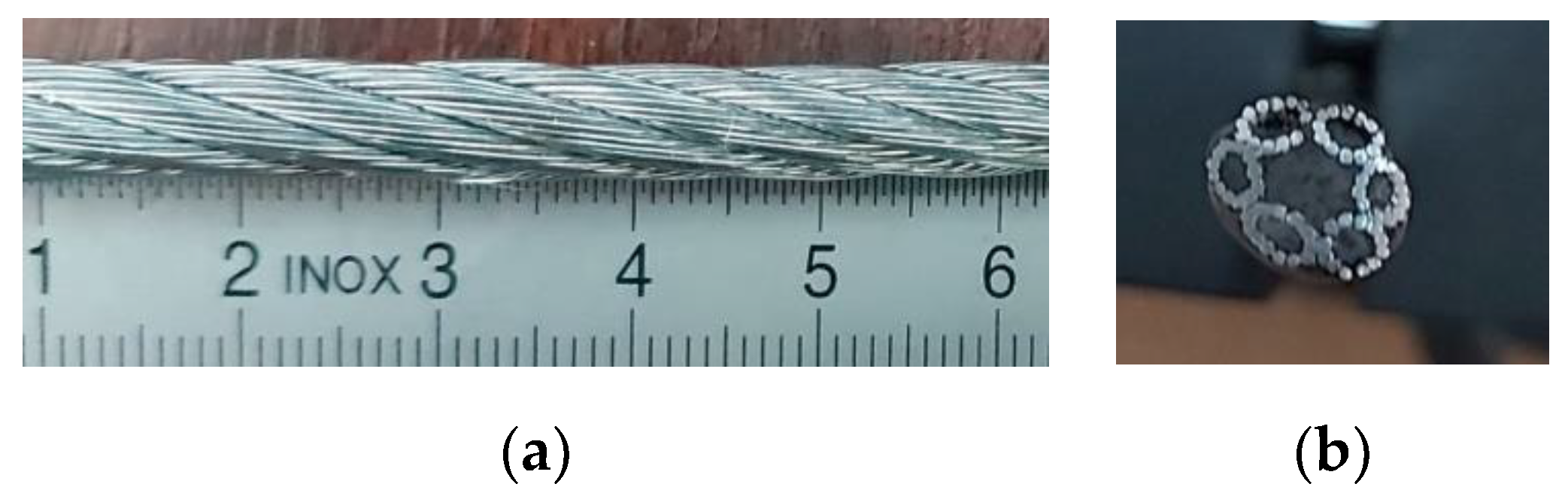
The strands wire rope considered in this analysis was a regular 6(12+
FC) +
FC commercial cable, type CA1AA072A© (CABLERO, Iasi, Romania), 6-mm diameter, based on 6 strands with 12 steel wires of 0.4-mm diameter, designed for 288-kg maximum service load (traction load) for utilization on anchorage and kinematical applications, without any flexural loads due to pulley-based devices (
Figure 3). The symbol
FC within its code means that it has a fiber core, both for stands and for the rope. The unitary length mass is 0.11 kg/m and the theoretical failure load is 9.82 kN [
12]. The nominal metallic cross-section area
S, evaluated with the expression (π/4)
fd2, acquires the value
S = 9.05 mm
2, where
d denotes cable diameter, and the fill factor
f yields 0.32 value, according to the steel wire and whole cable diameters ratio δ/
d = 0.4/6 = 0.067 [
12].
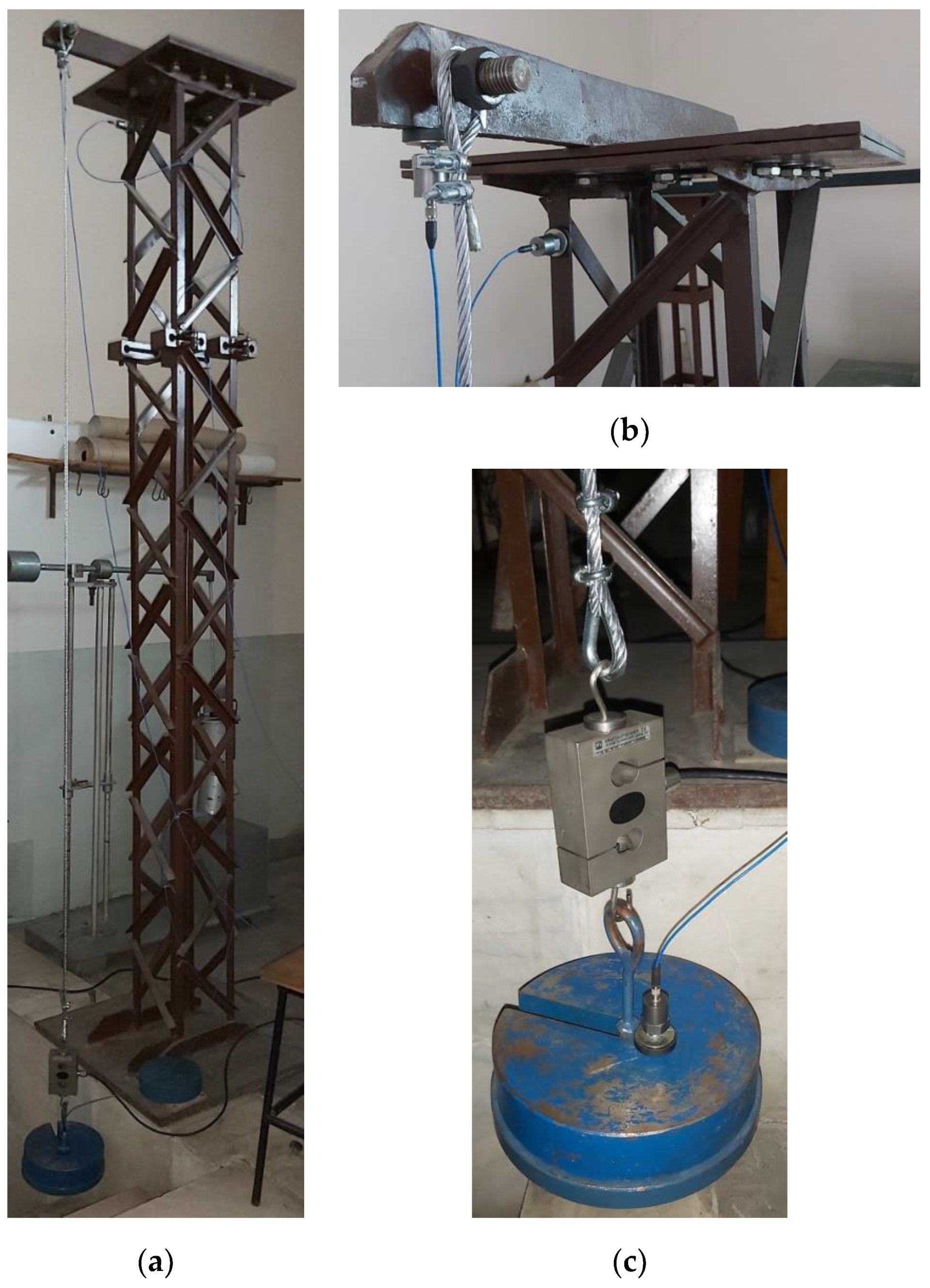
The experimental schedule considered many tests, with both initial integrity cable samples and artificially induced damages. Each sample had 2.200 m length between linkage devices. All samples were adopted from the same wire rope. Pre-tensioning force was enabled by a static load with mass m = 19 kg.
The defects produced during the use of strands wire rope within technical systems include wire breakage, wear, deformation, rust, and fatigue. Among them, fatigue includes various representations: internal and external cracks, internal and external wire breakages, and slack. In practice, the above damages interact with each other. Among these, the wire breakage is the main cause of MWSSR failure. It will reduce the strength and increase the potential safety hazards of MWSSR [
11]. Thus, we exclusively considered the structural damage case of steel wire breakage.
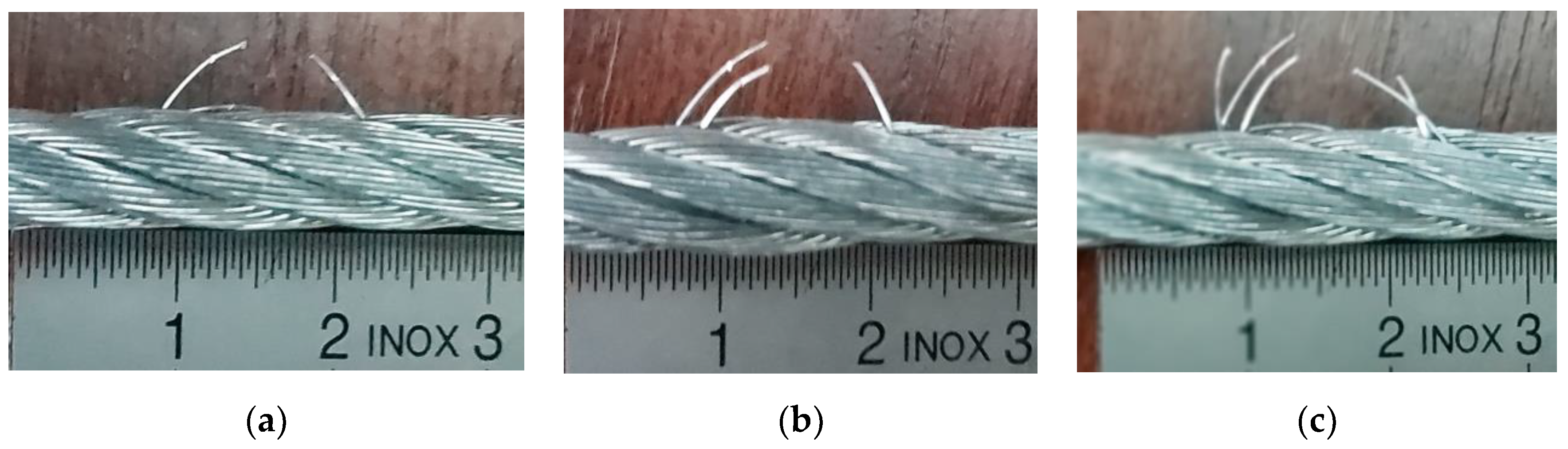
The damage induced into the cable structure during the tests consist of an artificial rupture of steel wire. It was considered a damage succession of one by one to three wires within a single rope strand. Taking into account the objective of this paper, the scenario of experiment was adopted based on the hypotheses: (1) The method is able to identify dynamic effects due to one broken wire; (2) The method is able to identify spectral differences between one-step broken wires; (3) The experimental investigations start with the case of no damaged cable sample. Thus, the increasing of broken wires number (beyond three) is not necessary because it does not provide additional information, but only increases the number of iterations for post-processing procedure. The authors considered that the adopted experimental schedule could provide enough evidence to demonstrate the feasibility of the proposed techniques.
Figure 4 shows the selected cases for presentation, with specification that the first case supposed undamaged inspected cable (strands rope with full integrity).
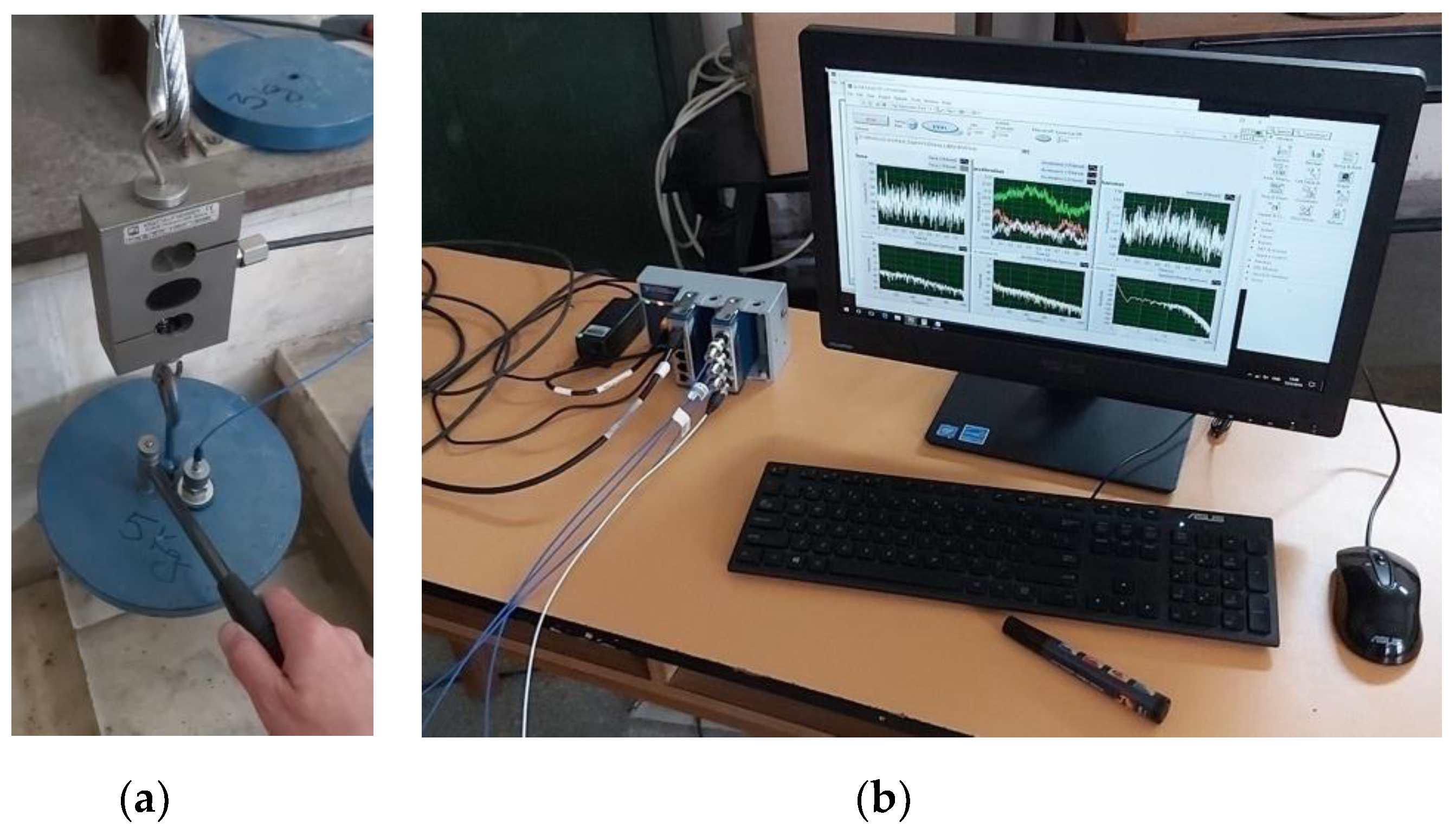
The same procedure of dynamic response evaluation of the rope-mass ensemble was carried out for each case and situation of analysis. To facilitate further comparative analysis of results, a computational procedure intended for timed harmonization of acquired signals was used. Effectively, it was used 0.1 s until the impact, 3.0 s time length of signal, and 104 samples/s acquisition rate, for all signals, cases, and situations. For high-order spectral analyses (see next section), short time-length signals of 0.05 s were adopted, cutting up from 0.005 s until the impact moment. To avoid the residual noise within high frequency spectrum, the signals from force transducers were initially filtered with a low-pass filter (fcut = 400 Hz) within the acquiring equipment (analog filtering).
2.3. Theoretical Basics for Signals Post-Processing and Investigations
The assessments within this study were formulated based on the hypothesis that the inspected wire rope and the loading mass formed a vibrating system, and the dynamic response due to experimental/operational perturbations contains essential information about the wire rope characteristics. Obviously, due to the changes during the exploitation time, these are able to provide useful information regarding potential structural/functional damage.
Considering the monitored residual motions of the hanging point on the upper side of the latticed support tower, the post-processing procedure primarily implied the evaluation of the absolute acceleration of loading mass, through rejection of parasitic components from the main acceleration acquired on the loading mass. Note that the vertical direction was considered acceleration (along the cable) to simplify the post-processing and analysis computational steps.
We considered that changes between analyzed cases would be more evident on spectral composition of investigated signal. Thus, we took three categories of spectral methods into account, starting from the simplest to the advanced (related to their intrinsic capability of analysis). It was assumed that constant scale methods based on Fourier transform (of both low and high order) provide basic information, while multi-scale techniques carry out deep data investigations.
Acquired signals were investigated, in terms of spectrum composition, in three main directions: (i) using classical Fourier transforms and cross-spectral techniques; (ii) using high-order spectral analysis techniques; and (iii) using complex multi-scale methods, mainly based on wavelet algorithms. Theoretical basics and computational formulations for all directions are briefly presented in this section.
The first direction of analysis contains the evaluation of spectral composition for each acquired signal. A Fourier Transform-based computational algorithm, known as Discrete Fourier Transform (DFT), was used, and the results were exclusively considered in terms of magnitude. Supposing an input data sequence
, the DFT algorithm will transform it into another sequence
with the expression [
13,
14]
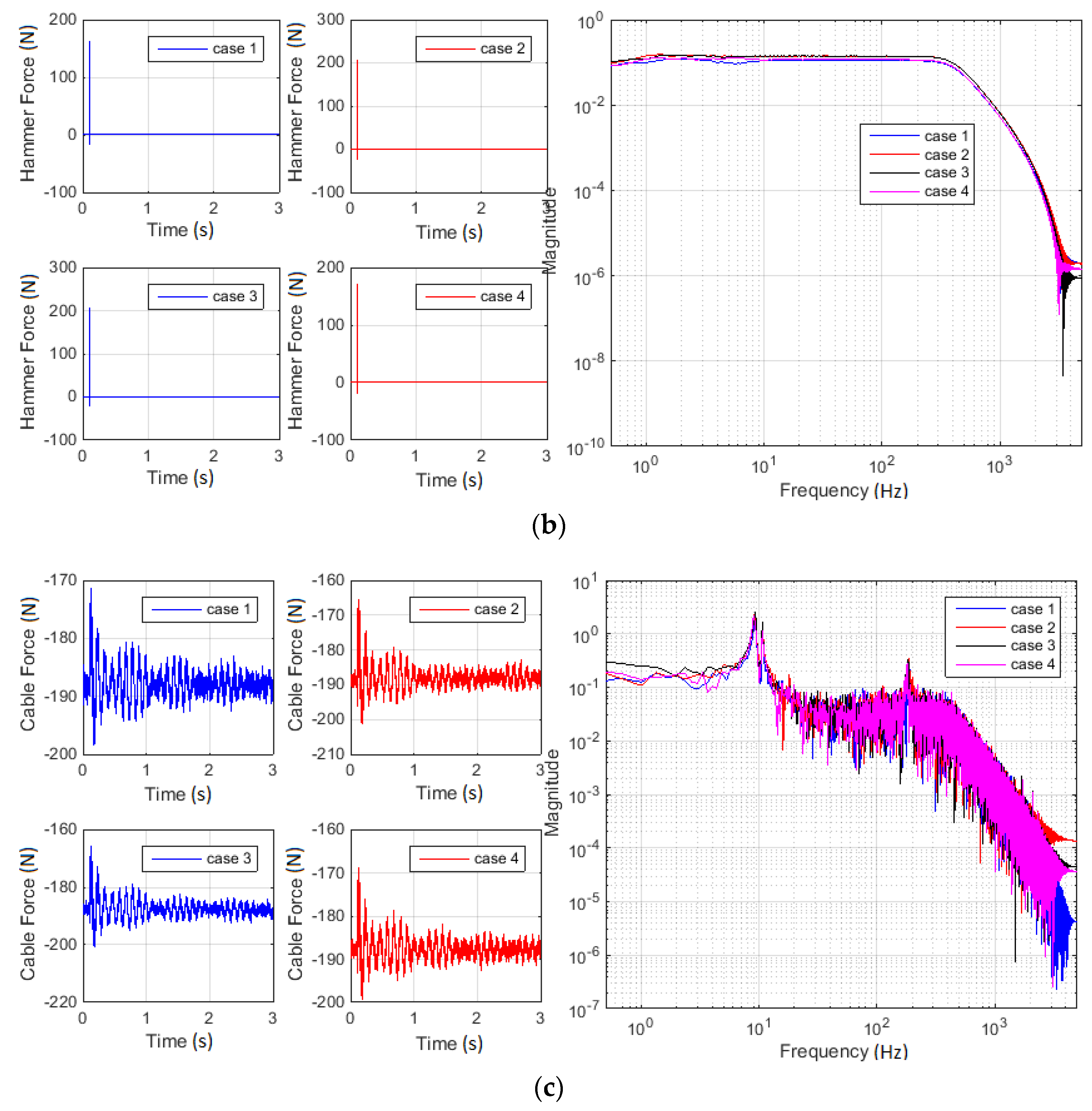
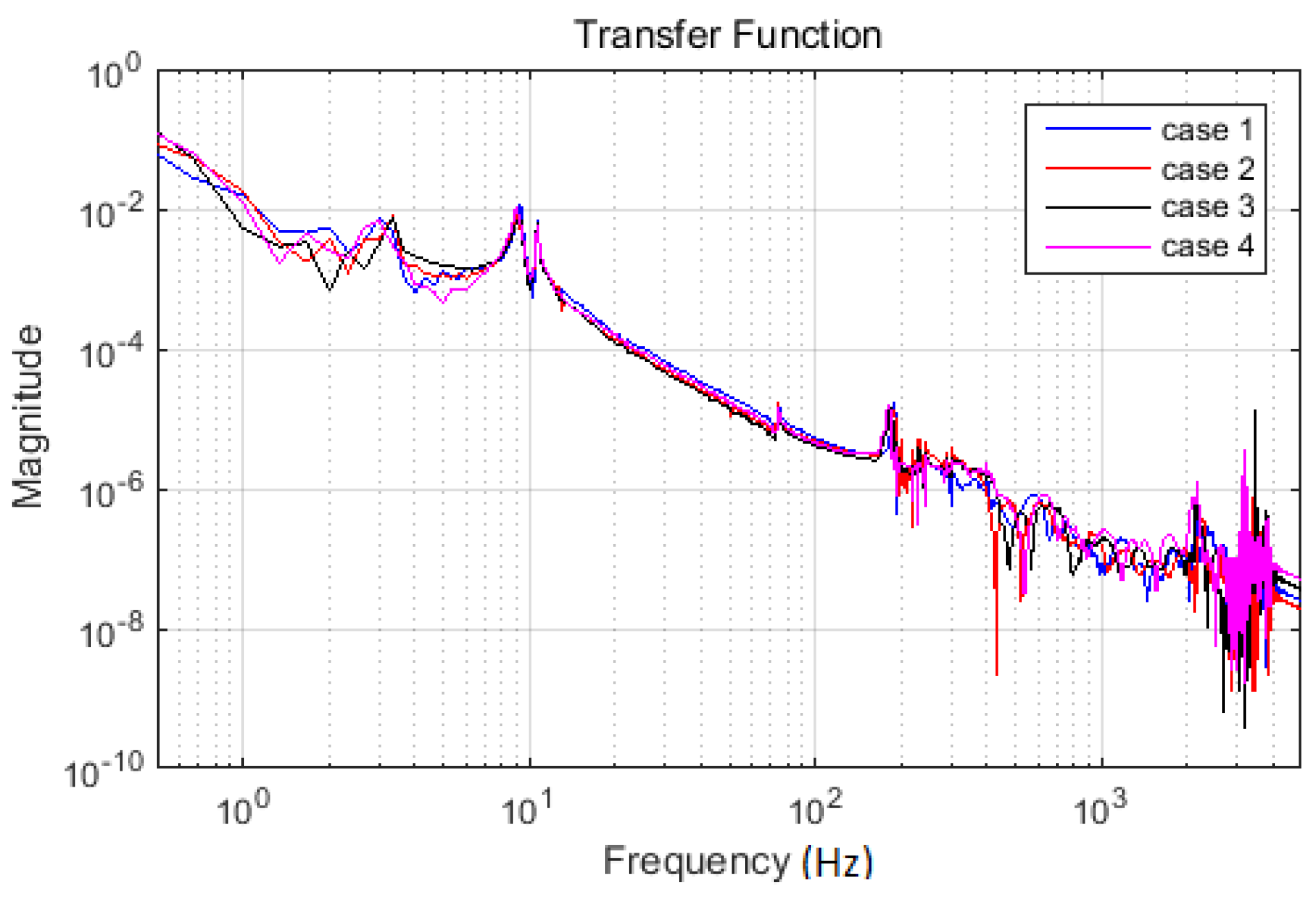
The spectra of the impact hammer force and the loading mass displacement directly result in the transfer function of the investigated system. Since the impact force and the displacement were both acquired at the same location (situated onto loading mass), the evaluated transfer function denotes the driving point function, which is the system admittance as viewed through the input point
where
H is the driving point transfer function,
f denotes the frequency, and
a and
F represent acceleration and force spectra, respectively [
14,
15].
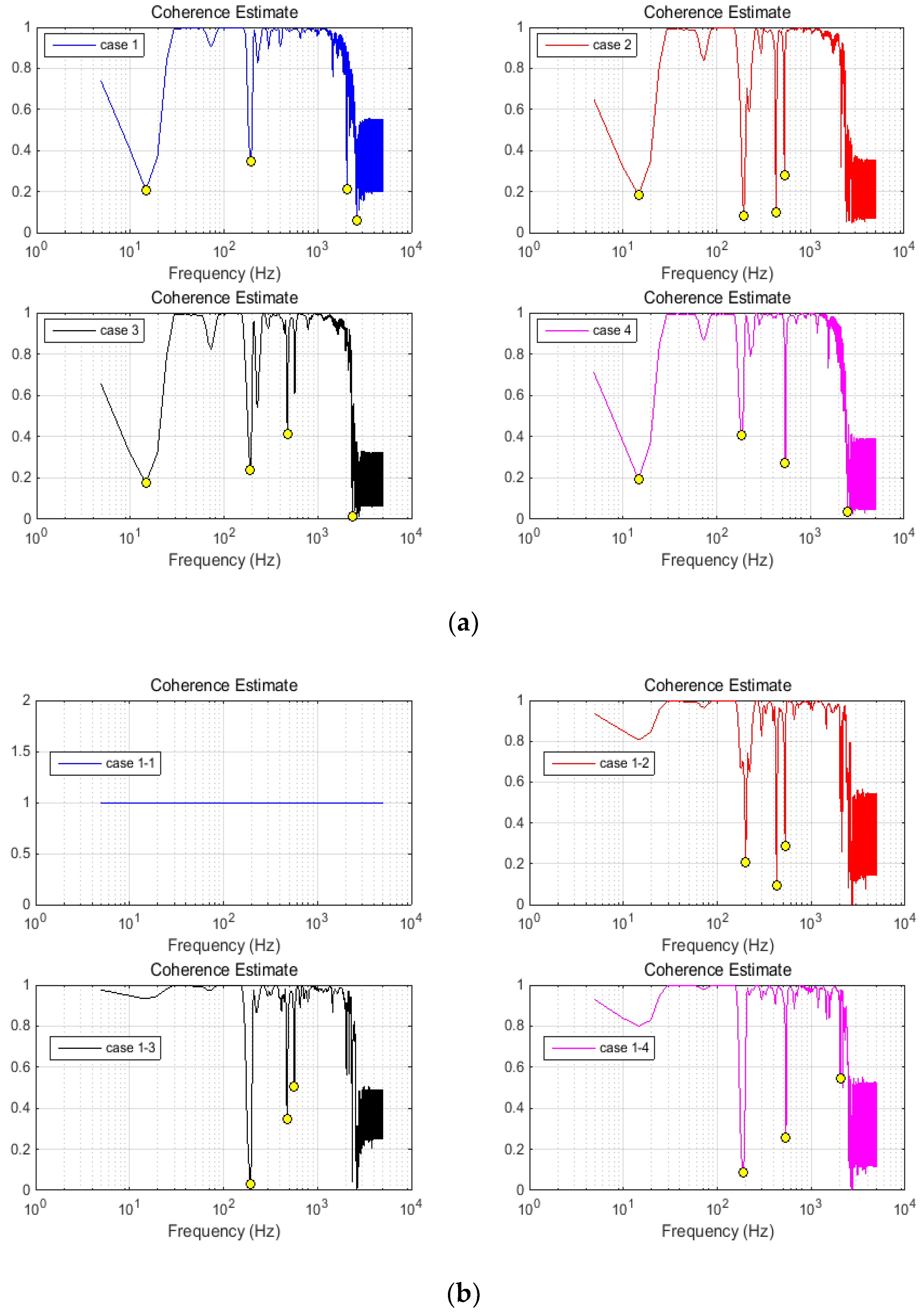
Supposing that the investigated ensemble respects the single-input–single-output (SISO) system schematization, the coherence between the input and the output was evaluated for each case, using the expression of magnitude-squared coherence
Cxy(
f) [
16]
where
Gxy(
f) is the cross-spectral density between input/output investigated signals
x and
y, respectively
Gxx(
f) and
Gyy(
f) denote the auto-spectral density of the two signals.
A procedure involving the evaluation of coherence losing points in diagrams, followed by a comparative analysis may become time-consuming. In addition, this approach may produce results affected by errors due to the adopted technique of picking peaks. Hereby, the authors proposed a new approach, according which the coherence between initial and actual response of the monitored system is permanently computed. The responses are considered in terms of effective acceleration.
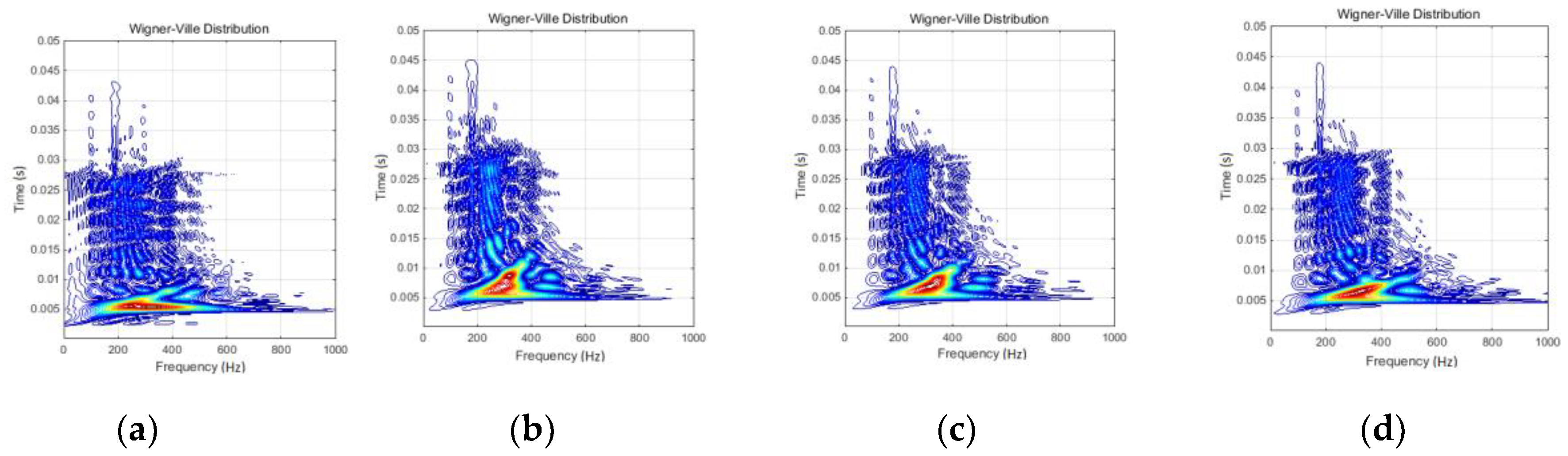
The second direction, involving high-order spectral analysis (HOSA) techniques, was adopted to increase the ability to detect fine changes within the response signal spectrum, where classical Fast Fourier Transform (FFT) might fail in proper evaluation. From the available methods, the authors selected the Wigner–Ville distribution (WVD) and the bi-spectrum (BS) evaluation.
The motivation for the WVD was that it offers excellent resolution in both the frequency and time domains, in contrast to the short time Fourier transform that has resolution limited in either time or frequency (related to window function) and suffers from smearing and side lobes leakage. Additionally, the Wigner function reduces the spectral density function at all times for stationary processes and is equivalent to the non-stationary autocorrelation function. Therefore, it roughly shows how the spectral density changes in time [
17,
18].
Supposing a signal
x(
t), the continuous WVD is given by [
17,
18]
where
t and
f denote time and frequency, respectively, and stared superscript indicates the conjugate. In the case of a unique signal
x(
t), the WVD is a bilinear function of the signal.
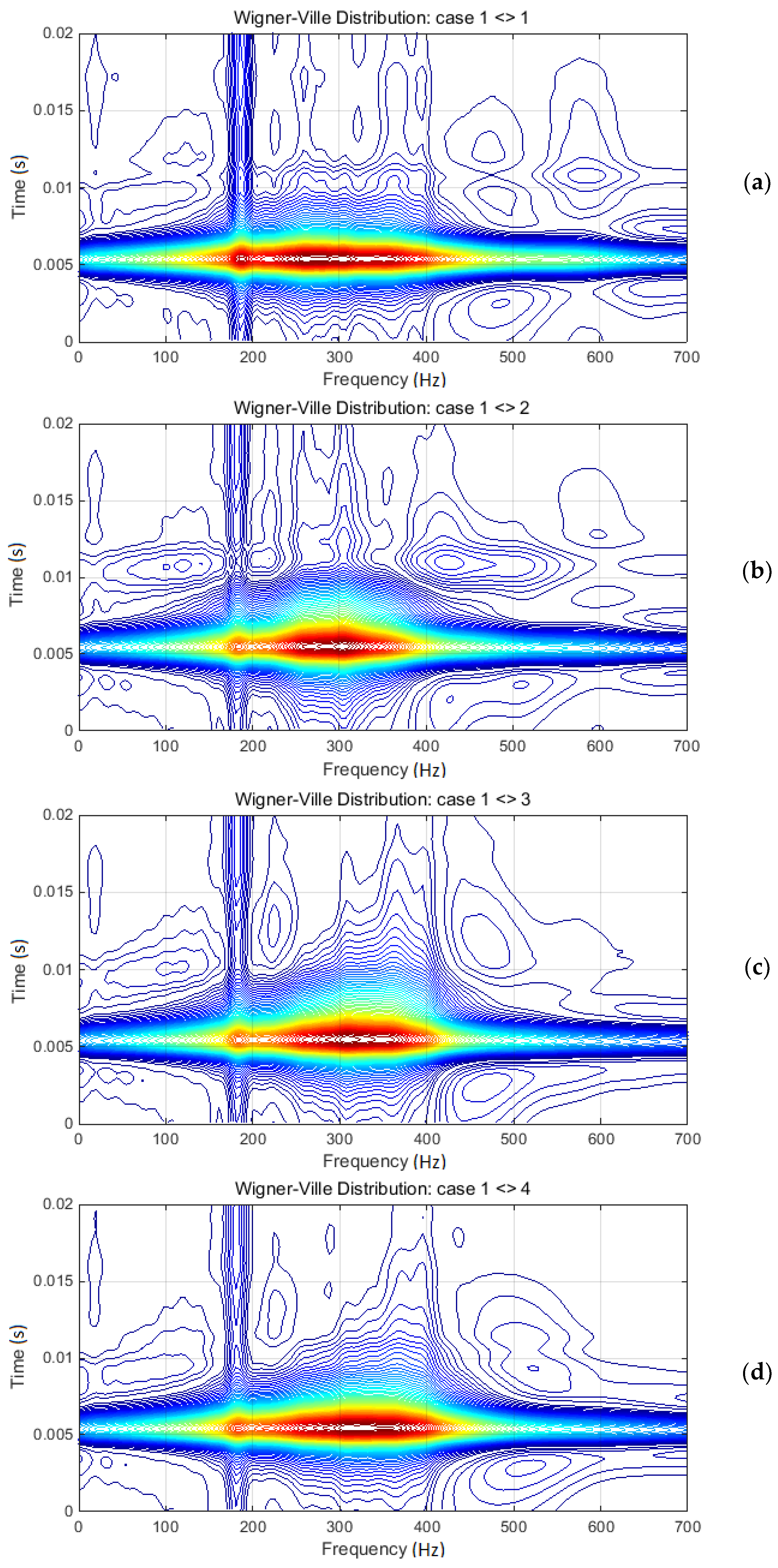
Since the present study treats the problem of changes in spectral distribution of multiple signals (acquired on the same point, but at different moment of time), the authors used the WVD between the initial case and one of the other cases (successively considered). Additionally, in practice, the signals were usually provided by sampling procedures, thus a discrete formulation of WVD becomes necessary. The most utilized expression for discrete WVD, for two signals
x(
t) and
y(
t), is [
17,
18]
with the instantaneous cross-correlation
Rxy defined by
where
n is a parameter identified with time and
m with lag. Note that the input signals must be sampled at twice the Nyquist rate or faster, in order to avoid aliasing.
To reject the cross-interference terms that result from the components that differ in both time and frequency center, a kernel function based on Choi–Williams distribution function was used. This windowing function, also known as exponential kernel function, can be calculated as [
19,
20]
where
η and
τ can be identified with frequency and time variables, respectively, and α represents the scale factor of the Choi-Williams window. This scale factor, usually constant, assures the suppression performance of the cross-terms (the smallest α values implies the better rejection performance) [
19,
20]. Thus, considering the inverse Fourier transform of this kernel function [
19,
20,
21], and windowing the instantaneous cross-correlation, the practical expression of complex WVD scaled by Choi–Williams window is
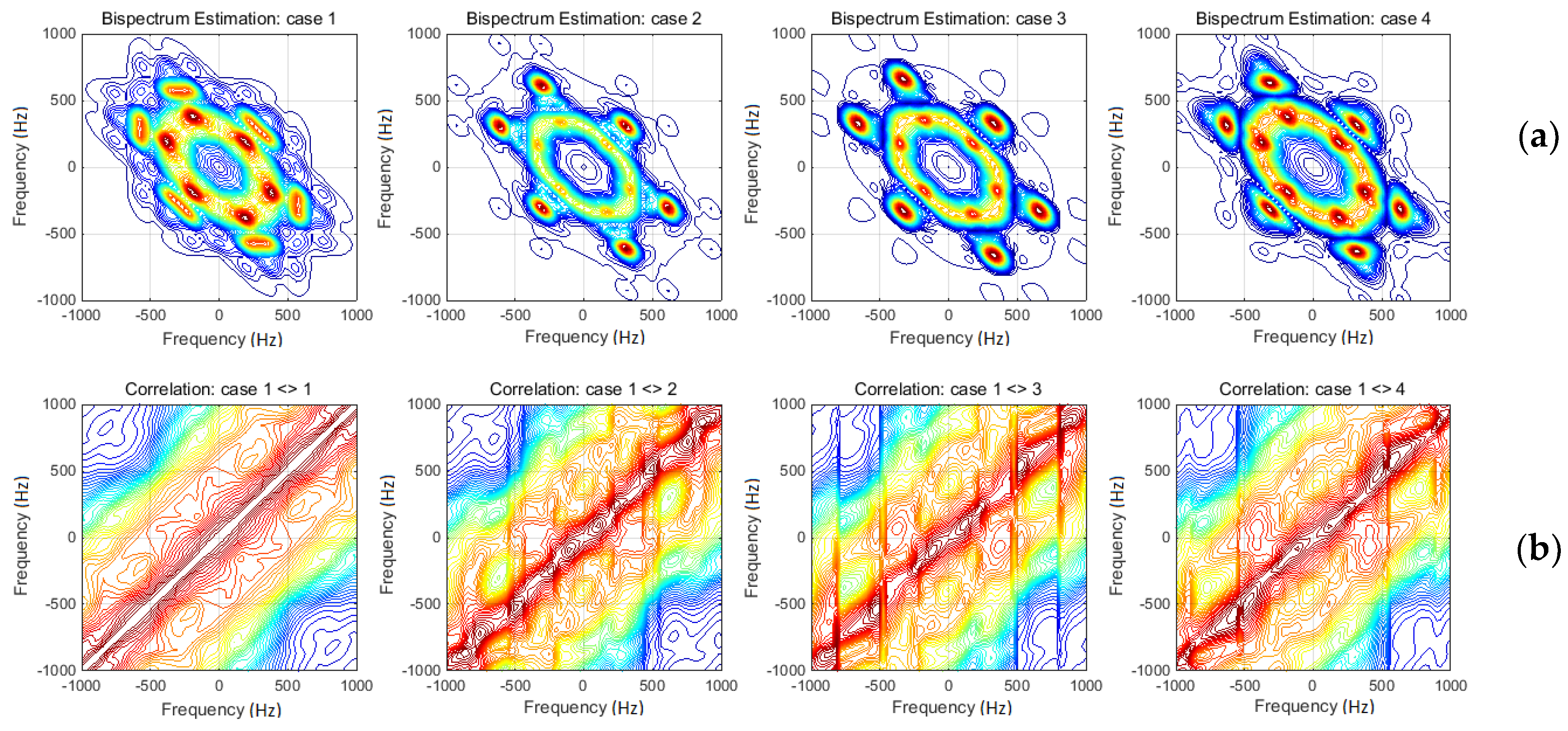
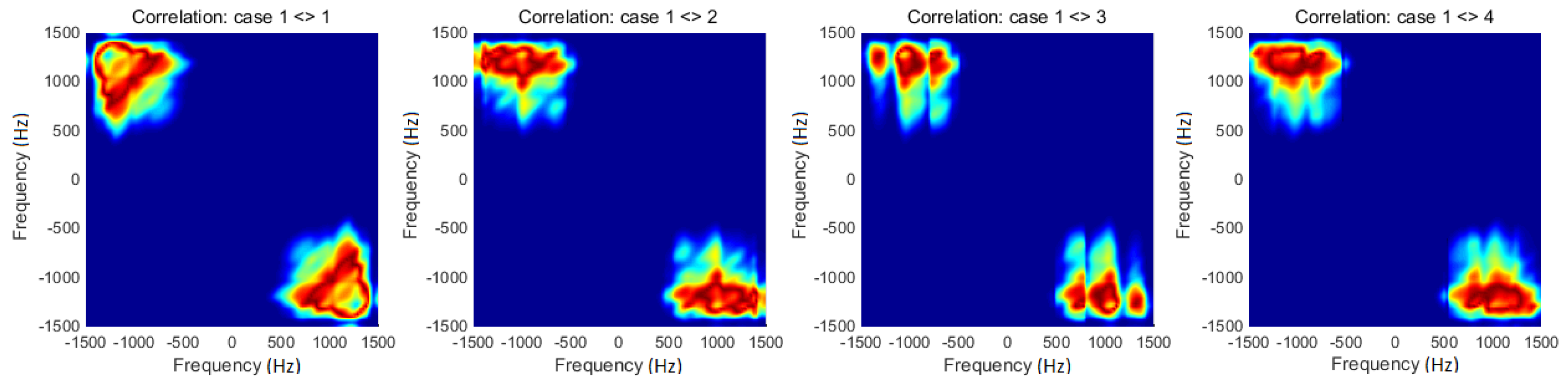
BS ist he second HOSA technique used in the post-processing stage, because it can find nonlinear interactions [
22]. In fact, BS is able to estimate the proportion of signal energy at any bi-frequency that enables quadratic phase coupling. BS is usually estimated as [
22]
where
B is the bi-spectrum evaluated at any frequencies
f1 and
f2,
F denotes the Fourier transform of original signal at specified frequencies, and superscript symbol (*) indicates the complex conjugate. It has to be noted that the prefix “bi” in BS terminology refers not to two signals, but rather to two frequencies of a single signal. One additional variant for analysis may consist in bi-spectral coherency (simply known as bi-coherence), which represents a squared normalized version of BS.
This polyspectral method is recommended to be used in the case of nonlinear interactions of a continuous spectrum of propagating waves in one dimension [
21,
22], thus that it may become very interesting in wire rope dynamic behavior investigation, especially for quantifying the extent of phase coupling in a signal.
Within present study, the authors performed comparative analysis between the BS of initial case and, successively, of every other case. Correlative estimations were performed in terms of cross-correlation method (with correlation coefficient and associated p-value outputs) applied to the two inspected BS. The correlation was separately evaluated for each frequency axis, and finally the results were averaged. This approach was adopted because the algorithm evaluates correlation coefficient and p-values for the correspondent column within the two investigated matrices. Thus, a pertinent evaluation of full correlation imposed a linear combination of results gained for each frequency axis.
The last direction of analysis supposes a complex multi-scale method for signal decomposition consisting of complex wavelet coherence (CWC) and cross-spectrum (CWCS). The HOSA techniques were involved to increase the changes estimation in spectral composition, while the multi-scale methods were additionally considered to gain certain significant spectral changes, but inoperable for the other algorithms.
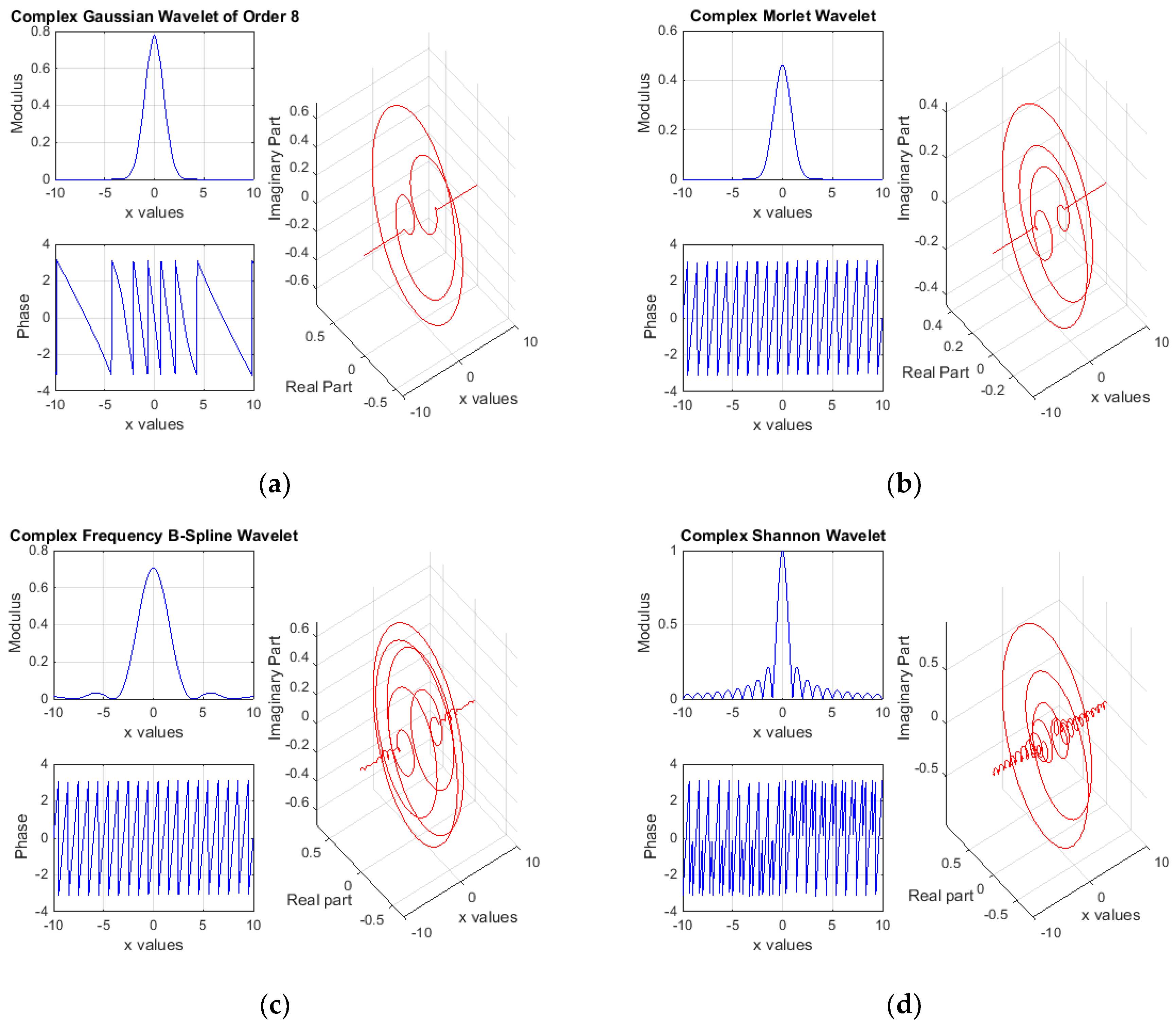
Initial wavelet-based estimations supposed four complex wavelet types, briefly presented as follows. Starting from the complex Gaussian function [
23,
24,
25]
results the complex Gaussian wavelet, by taking the
pth derivative of function
f. The integer
p denotes the parameter of this wavelet family and in the previous formula,
Cp is such that
, where
f(p) represents the
pth derivative of
f. A graphical representation of complex Gaussian wavelet, in terms of both modulus-phase and real-imaginary parts, is depicted in
Figure 5a.
The second type was the complex Morlet wavelet, defined by [
23,
24,
25]
where the two parameters are the bandwidth
fb and the wavelet center frequency
fc. A graphical representation of complex Morlet wavelet (modulus-phase and real-imaginary parts) is depicted in
Figure 5b.
Third type was the complex frequency B-spline wavelet, defined by [
23,
24,
25]
and depending on three main parameters as follows.
fb and
fc have the same signification as previously mentioned and
m is an integer-order parameter (m ≥ 1). Diagrams of complex frequency B-spline wavelet (modulus-phase and real-imaginary parts) are depicted in
Figure 5c.
Last wavelet type was the complex Shannon wavelet, usually obtained from the frequency B-spline wavelet by setting unitary
m [
23,
24,
25]
Such that it depends on the same two parameters
fb and
fc.
Figure 5d depicts the modulus-phase and real-imaginary parts of complex Shannon wavelet.
The continuous wavelet transform (CWT) was considered in terms of [
23,
24,
25]
where the mother wavelet was defined [
23,
24,
25]
with
a denoting the scaling parameter and
b the translation parameter. In Equation (15),
Ψ denotes the basic wavelet function and superscript symbol (*) indicates the complex conjugate. The wavelet function
Ψ within the wavelet transform
must have zero mean and be localized in both time and frequency domain [
24]. The wavelet is stretched in time by varying its scale
a [
25].
The authors adopted the complex Morlet wavelet to be used practically within this study, because it is able to provide a good balance between time and frequency localization [
24,
25].
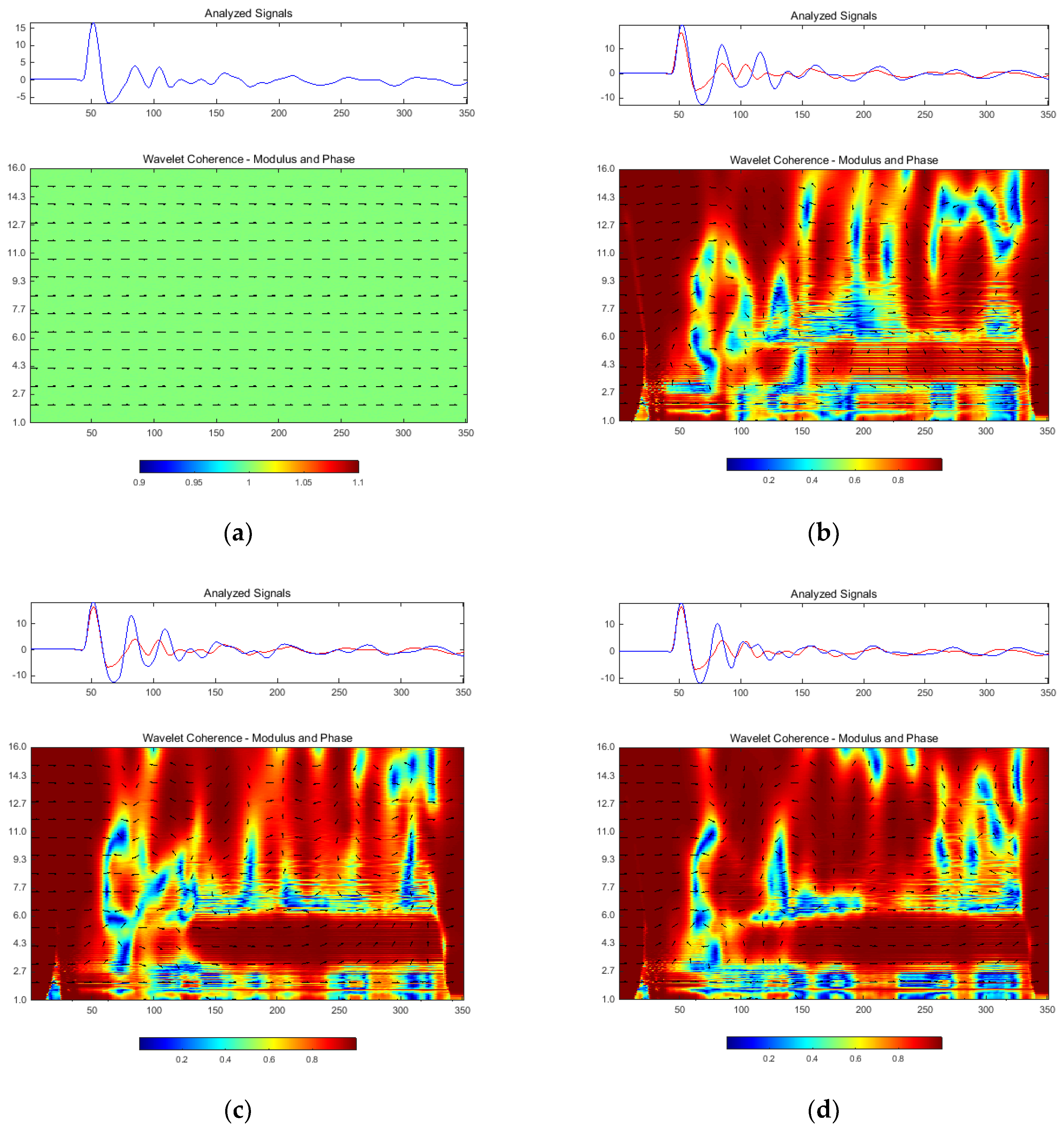
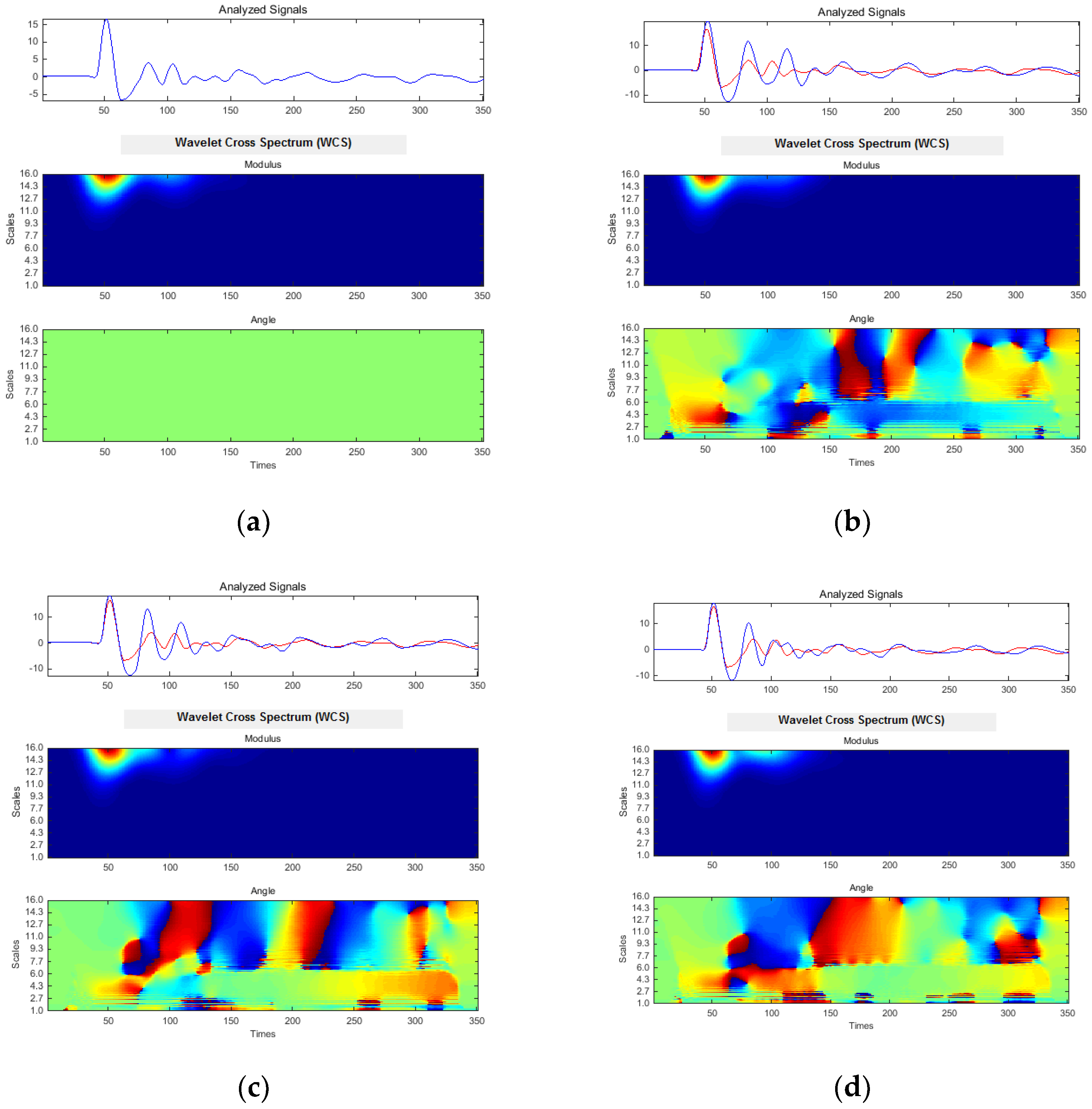
The wavelet-based investigations used the complex wavelet cross-spectrum, defined as the product by CWT of first signal
f with the complex conjugate CWT of second signal
g [
25]
The wavelet coherence results as a normalized wavelet cross-spectrum [
25]
Since inspected signals were provided by an initial sampling procedure, the wavelet transform in Equation (14) has to be reconsidered for discrete data application. Hereby, the discrete wavelet transform (DWT) of a time series (
xn,
n = 1, …,
N) with uniform time steps
δt is defined as the convolution of
xn with the scaled and normalized wavelet [
25]
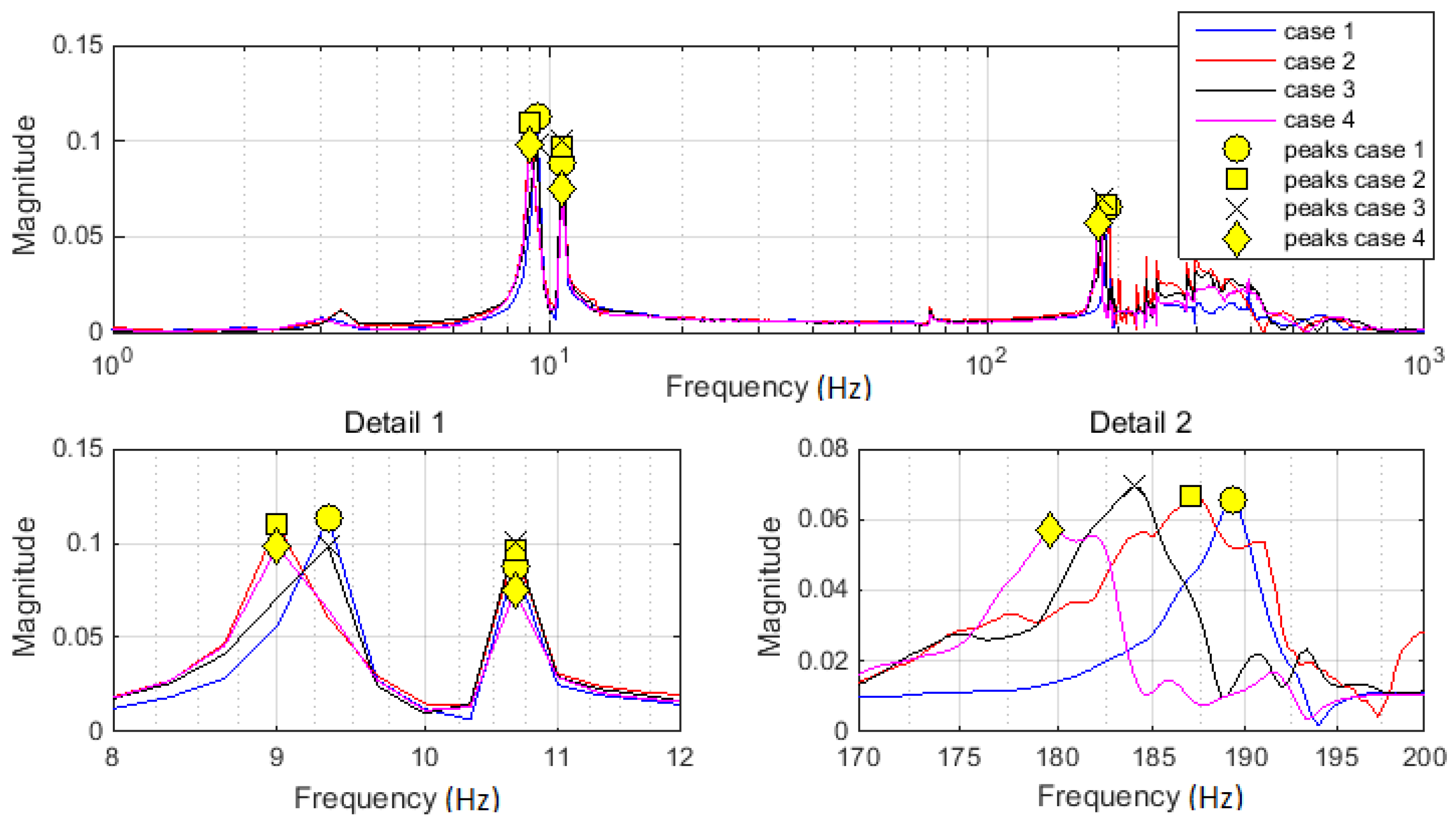
For clarity, the primarily used investigation techniques are summarized. In terms of particular changes between inspected cases (during the exploitation time), following aspects were considered:
- (i)
essential peaks in FFT magnitude of mass acceleration;
- (ii)
frequencies of losing coherency, both for each considered cases and between initial and successively actual cases;
- (iii)
consistent regions within initial transitory time domain on WVD diagrams;
- (iv)
shape changes and symmetry losing on cross-correlation between BS diagrams; and
- (v)
low values within the scale-time diagrams related to CWC between initial and successively actual cases.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}