4.1. Linear Elastic Material Model
For a descriptive mathematical model of tensile fabrics using linear elastic formulation, the physical body is idealized as a two dimensional membrane with plane stress conditions and orthotropic material response [
18,
19]. In general, 5 elastic constants appear in the formulation which are identified from the stress–strain paths of the considered experiments. To this end, a typical least-square objective function may be introduced to minimize the difference between the experimental and computed engineering strains along the yarn directions; i.e.,
,
which are obtained from
Another alternative of the objective function may be an error function which reduces the difference between the experimentally measured and numerically computed nominal stress values; i.e.,
,
, which are formulated as
In these equations,
and
are the Young’s modulus in the warp and the fill directions. The Poisson’s ratios are denoted as
and
. The thickness
t is set to 1
and thus, the nominal stresses are the resultant ones with the unit of force per length
. The same applies to the unit of elastic moduli. Since in the experiments no shear test was carried out, the in-plane shear moduli may not be identified here and later in the structural simulations it will be set to a usual magnitude of
, see [
20]. Taking into account the material symmetry constraint, the relation in Equation (
3) holds, and hence the total number of material parameters to be identified for the linear elastic model is reduced to 3. That is, the second Poisson’s ratio is computed from Equation (
3) and not directly considered in the optimization.
In order to preserve the positive definiteness of material tangent of the linear elastic formulation, the product of the Poisson’s ratios is bounded with . In case of violation of this condition, the linear elastic model can not be directly used in numerical simulations. In addition, this restriction leads to a less precise representation of the observed lateral contractions during uniaxial tensile tests in either directions.
In the current work, unlike the traditional method of parameter adjustment of the fabric membranes, see [
18,
19], the Poisson’s ratios are not identified only based on the stress–strain relation of biaxial tensile tests. Therefore, by inclusion of the lateral contraction data of the uniaxial tension tests in the objective function, the model is trained and may allow for more crosswise interactions, cf. [
8].
4.2. Orthotropic Nonlinear Polyconvex Material Model
In the following, the nonlinear orthotropic material model is briefly described. The model was originally proposed for the geometrically nonlinear simulation of glass-PTFE fabrics, see [
14]; nonetheless, the capability of the model was also demonstrated in the representation of material response of PES-PVC fabrics in [
15]. The terms included in the model are all polyconvex, thereby, a numerically robust and materially stable formulation is guaranteed, cf. [
14,
21,
22]. The orthotropic nonlinear model was characterized and investigated in [
14]; wherein, the advantages including increased numerical robustness and match with experimental data of inclusion of the polyconvex orthotropic term was demonstrated and compared to the other competitive formulations, see [
23,
24]. Comparing the model to the linear elastic formulation in [
8], the accuracy of the proposed model in simulation of the newly proposed large-scale inhomogeneous test setting, the pressure chamber test, using glass-PTFE material was showcased. In [
15], taking into account three types of PES-PVCs, the possible meaningful correlation between the material parameters of the nonlinear model and the tensile strength was established.
In the continuum mechanical description, taking into account the constituents of woven coated fabrics, either glass-PTFE or PES-PVC, the heterogeneous material is idealized as a continuum membrane with an isotropic matrix (coating) which is reinforced in two perpendicular in-plane directions, i.e., warp- and fill directions. Therefore, by postulating the existence of a strain energy function , the proposed hyperelastic model is formed as an additive combination of different energy terms. It is assumed that each separate nonlinear term represents a specific behavior where the intensity of the intended response is simply controlled with only one linear coefficient ; i.e., . This is the salient feature of the proposed nonlinear model, as at the end, only 4 material parameters remain which are to be adjusted for an individual material, i.e., .
Each included nonlinear deformation mode
is a function of the right Cauchy–Green deformation tensor
, with
being the deformation gradient, and the nonlinear model parameters
. The
are internal parameters controlling the nonlinearity of each deformation mode. They are identified and fixed for each group of fabrics; i.e., PES-PVC and glass-PTFE, following [
8] which is based on the proposed method in [
25]. Thus, the final form of the nonlinear model becomes linear in the material parameters
while staying nonlinear in the deformations and is obtained in the following form
In the above, the isotropic term represents the isotropic response mainly caused by the coating (matrix) material. The two transversely isotropic terms act as tensile reinforcement in the warp- and fill directions which are denoted as and . The orthotropic or interaction term mainly controls the crosswise inter-yarns interactions and is denoted with . In addition, one penalty/volumetric term is included which assures a nearly incompressible material response. Hence, the coefficient is chosen large enough to fulfill this purpose . Although, the terms in the energy density are included to represent the intended response, the impact of different terms on each other is not completely avoidable.
In the formulation of the implemented polyconvex orthotropic term, unlike the typical multiplicative non-polyconvex ones [
23,
26], the notion of anisotropic metric tensor
is utilized as the so-called structural tensor. In general, the full component metric tensors are able to describe generic classes of anisotropy which at the same time may preserve the polyconvexity condition of the energy density functions [
22]. The anisotropic metric tensors
are, therefore, a more generalized form of the classical structural tensor which are defined as
, cf. [
27]. In the classical form, also utilized in the formulation of the transversely isotropic terms, here
,
is a unit vector pointing in the yarn direction, where the properties
,
and
hold. However, the metric tensor is determined as
with tensor
being a linear tangent map of a fictitious Cartesian basis
into the material principal directions; i.e.,
and
where
. For further details on the characteristics of anisotropic metric tensors, we refer to [
14,
22,
28]. In the simplified case where the global Cartesian basis and the material basis coincides, the orthotropic metric tensor turns into the simple diagonal matrix
with only 3 non-zero components
which are the postulated length of material basis in the warp, fill and thickness directions, respectively. They can scale a material property in the specific material direction and at the same time, allow for direct transverse interactions. In the case of textile membranes where only two yarn families are presented, the thickness direction component may be set to zero
. For further simplification purpose, the component in
-direction is set to one, i.e.,
, and only the model parameter
b is to be identified for a specific material which will be termed as
in the model. Thus, the final form of the metric tensor is obtained as
. Considering weak interactions between yarns and coating material, the specific forms of each individual nonlinear term/mode are given as
In the above, the principal invariants of deformation tensor are , and . In the transversely isotropic terms, the mixed invariants of and are utilized; i.e., and . Considering only tensile reinforcements, the Macaulay brackets are used to cancel out the transversely isotropic terms while the yarn direction is under compression; i.e., . The bar above the quantities implies the volume-preserving part of the invariants, i.e., and . The mixed invariants in the interaction term are defined as and using the above described metric tensor. The trace of metric tensor is denoted as .
4.3. Parameter Adjustment Procedure
As demonstrated in [
15], the 4 model parameters
can be initially identified as a part of the model and kept fixed for each group of fabric material, i.e., either glass-PTFE or PES-PVC, also independent from their types, see
Table 1. The main idea behind the identification of the model parameters is to minimize the deviation from the average value of the material parameters
, which can be identified and computed for each individual stress–strain point [
25]. Once this variation becomes minimized, the model parameters are identified and fixed for all types of a membrane material. In principle, the parameters
can also be individually identified to best match each membrane response by exploiting the full flexibility of the original formulation as in [
14]. Nevertheless, the application of this method leads to the following advantages: (a) The model will be specialized for each group of membrane material and can be easily handled. (b) The number of total material parameters to be identified for each membrane is decreased to maximum 4 parameters, which is very similar to the simple linear elastic model; however, with a more accurate representation of membrane behavior [
8]. (c) As it will be demonstrated, the identified model parameters can be used for all types of a fabric material at different stress–strain states, despite the fact that the material response is significantly changing from an initial load cycle (LC) to the latest one at LC 1000. (d) Following the method in [
25], a unique identification of material parameters may become feasible as the remaining parameters appear only linearly in the formulation and thereby, the least-square error functional in terms of the stress deviation becomes convex in the material properties
, see [
8]. Moreover, since the material parameters mainly act as scaling factors of each deformation mode, a quite small sensitivity on the material behavior is automatically included. Therefore, to demonstrate the above mentioned points and show the generality of the nonlinear model, in this paper, the previously identified values of model parameters
from the authors’ work in [
8,
15,
24] are directly implemented for the tested glass-PTFE and PES-PVC fabrics here. The values are listed in
Table 3.
In the remainder of the paper, for simplicity of the formulations, the parameters in the linear elastic formulation (
) and the material parameters in the nonlinear model (
) are all referred as material parameters
. Furthermore, for a fair comparison between the two models, the material parameters
of both models are fitted using the objective function defined
The total error functional is defined as the summation of different least-square error functions , which are determined as the relative deviation of a computed value denoted as from its measured counterpart . The shows the total number of measurement points. Subsequently, the material parameters are identified by minimization of the objective functional according to . Note that during the optimization procedure, the measured engineering strains in the yarn directions, i.e., and , are prescribed to the material model and the nominal stress components are computed. For the hyperelastic nonlinear material model, due to its 3-dimensional formulation, the third dimension deformation is computed by assuming an incompressible material response of woven fabrics. For both formulations, in the case of uniaxial tensile tests, the lateral strain was computed by iterating the transverse stress components to zero and thus, the deviation from the measured strain is included in the objective function.
For the further analysis in the next sections, a number of 10 load cycles out of the 1000 measured load cycles are selected and the material parameters are adjusted to each state, see
Table 4 and
Table 5. Five chosen load cycles belong to the first 100 cycles in order to highlight the change in the material parameters where the maximum portion of irreversible strain usually appears, i.e., LCs {4,5,10,20,75}. The other five are from the higher cycles where the material behavior is mainly elastic as the share of irreversible strain has decreased to a large extent, i.e., LCs {100, 250, 500, 750, 1000}.
Table 4 shows the adjusted parameters of the nonlinear material model. Note that, while fitting the glass-PTFE materials using the nonlinear material model, it was observed that the isotropic parameter tends to become zero. This indicates that the isotropic response in the glass-PTFE material is generally non-dominant; therefore, the material behavior is mainly dominated by the yarns’ tensile stiffness and their direct crosswise interactions, cf. [
8]. Thus, for the glass-PTFE materials, the parameter
is set to zero and the behavior is represented only with the remaining 3 parameters. This, however, was not observed in the case of PES-PVC where all parameters were influencing the material response.
Table 5 shows the adjusted material parameters of the linear elastic formulation. The second Poisson’s ratio was computed based on Equation (
3); however, the computed values are also included in
Table 5.
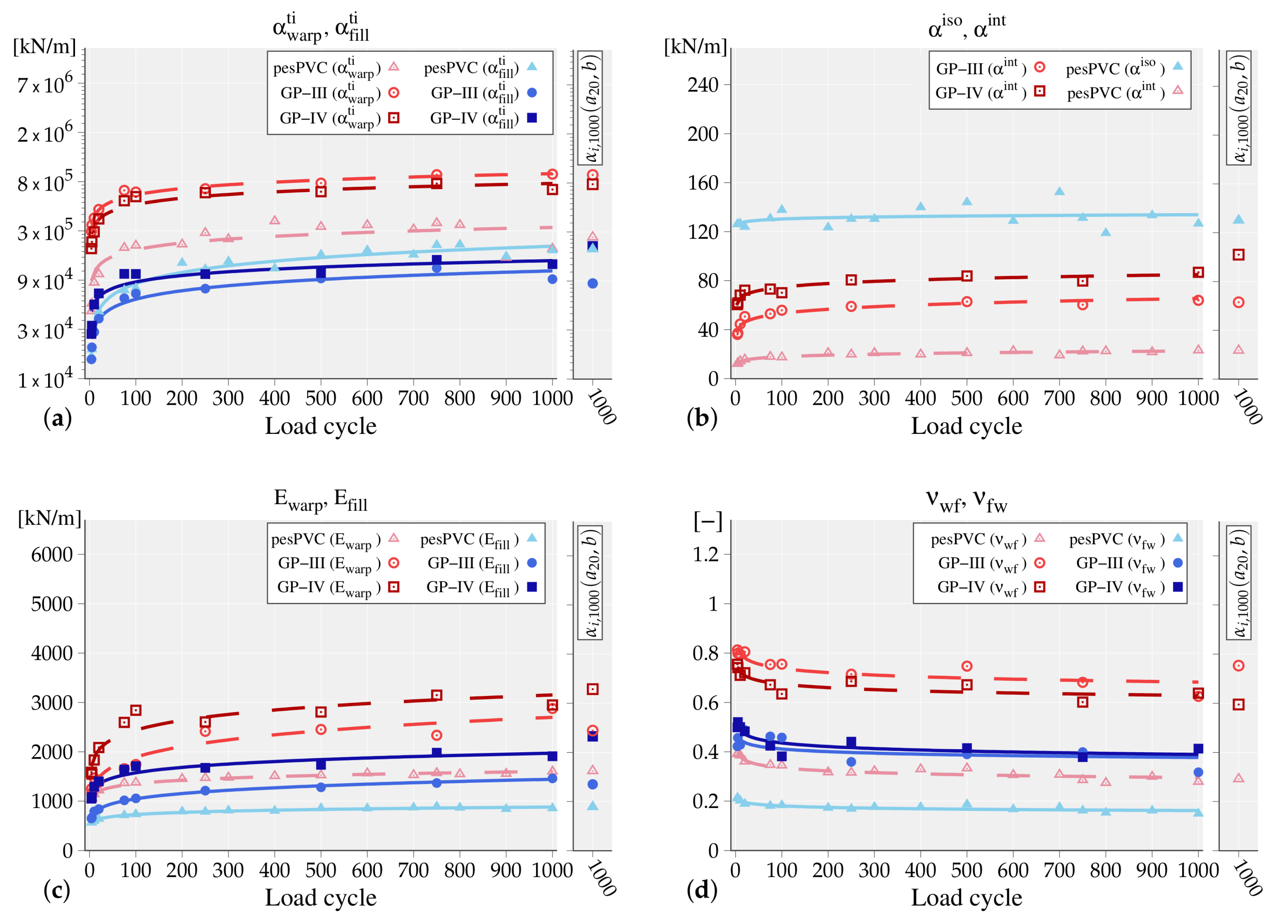
Taking into account the change of adjusted parameters of both fabrics from LC 4 to LC 1000, see
Table 4 and
Table 5, it is noticeable that the material parameters directly linked to the material stiffness are remarkably increased. That is, in the case of the linear elastic model, the Young’s modulus
and
become almost doubled and in the case of the nonlinear material model, the two coefficients of transversely isotropic terms
and
are raised by a factor of 5. The interaction parameters
of three tested fabrics also increase during cyclic loading, where, in the case of PES-PVC the values are much lower than the counterparts in glass-PTFE as the non-zero isotropic coefficient influences the material response. The Poisson’s ratios are all decreasing by advancing toward the LC 1000 indicating the change/decrease in the lateral contractions of the uniaxial tensile tests. Overall, the material response of the tested fabrics became stiffer after undergoing 1000 load cycles.
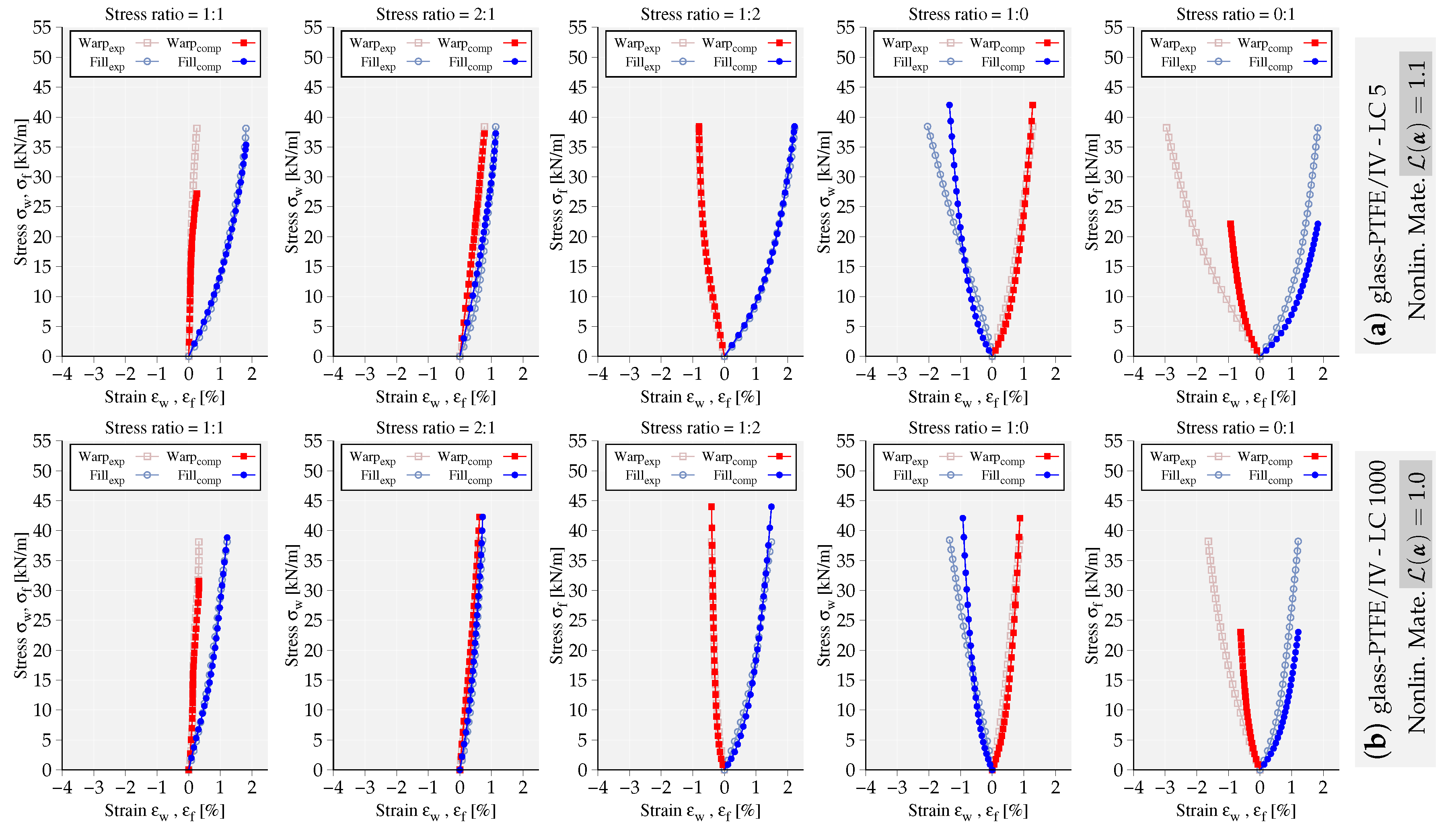
To exemplify the capability of the implemented models, the mechanical response of the fitted models to LC 5 and LC 1000 of glass-PTFE type IV are compared and illustrated in
Figure 3 and
Figure 4. The deviation of mechanical response from the experimental data is quantified using the value of objective functional
, where the obtained values are reported next to each set of graphs. It is noteworthy that both models fit more accurately the stress–strain paths at LC 1000 with the obtained lower error values. In general, the nonlinear material model represents the experimental data of glass-PTFE with more accuracy, at least 40% lower error value compared to the linear elastic model. In
Figure 5, the mechanical response of the nonlinear model fitted to LC 1000 of PES-PVC is shown. The nonlinear model is able to fit better both uniaxial stress–strain paths compared to the ones from glass-PTFE data. This becomes also evident from the overall error value which shows almost 30% less deviation from the considered experiments. More examples of PES-PVC data fitted by both formulations can be found in the previous work of the authors in [
15].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}