On the Directivity of Lamb Waves Generated by Wedge PZT Actuator in Thin CFRP Panel

 ,
,  ,
, 
Abstract
:1. Introduction
- -
- Geometric spreading;
- -
- Material damping;
- -
- Wave dispersion;
- -
- Dissipation into adjacent media.
- -
- Viscoelastic nature of matrix and/or fiber materials;
- -
- Damping due to interphase interaction;
- -
- Damping due to damage;
- -
- Viscoplastic damping due to the presence of high stress and strain concentration that exists in local regions between fibers;
- -
- Thermo-elastic damping due to the cyclic heat flow from the region of compressive stress to the region of the tensile stress.
2. Materials and Methods
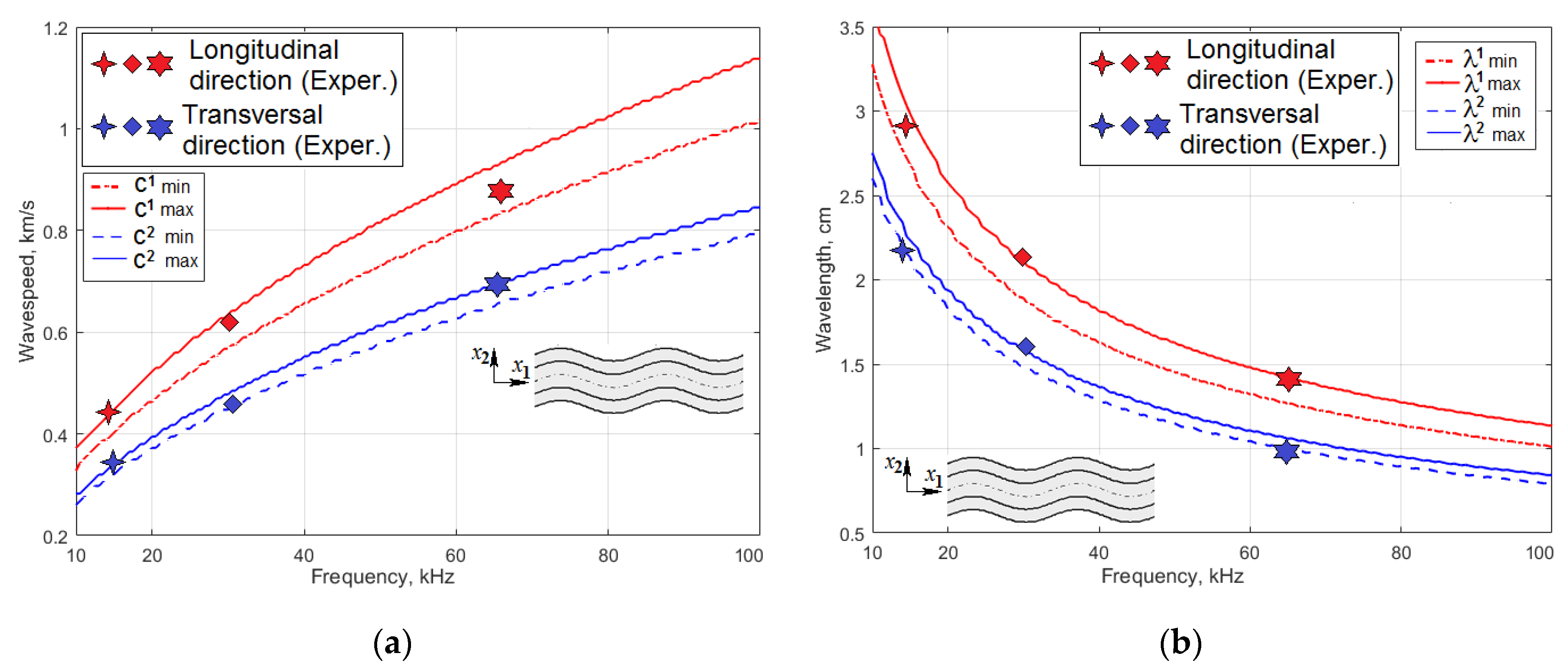
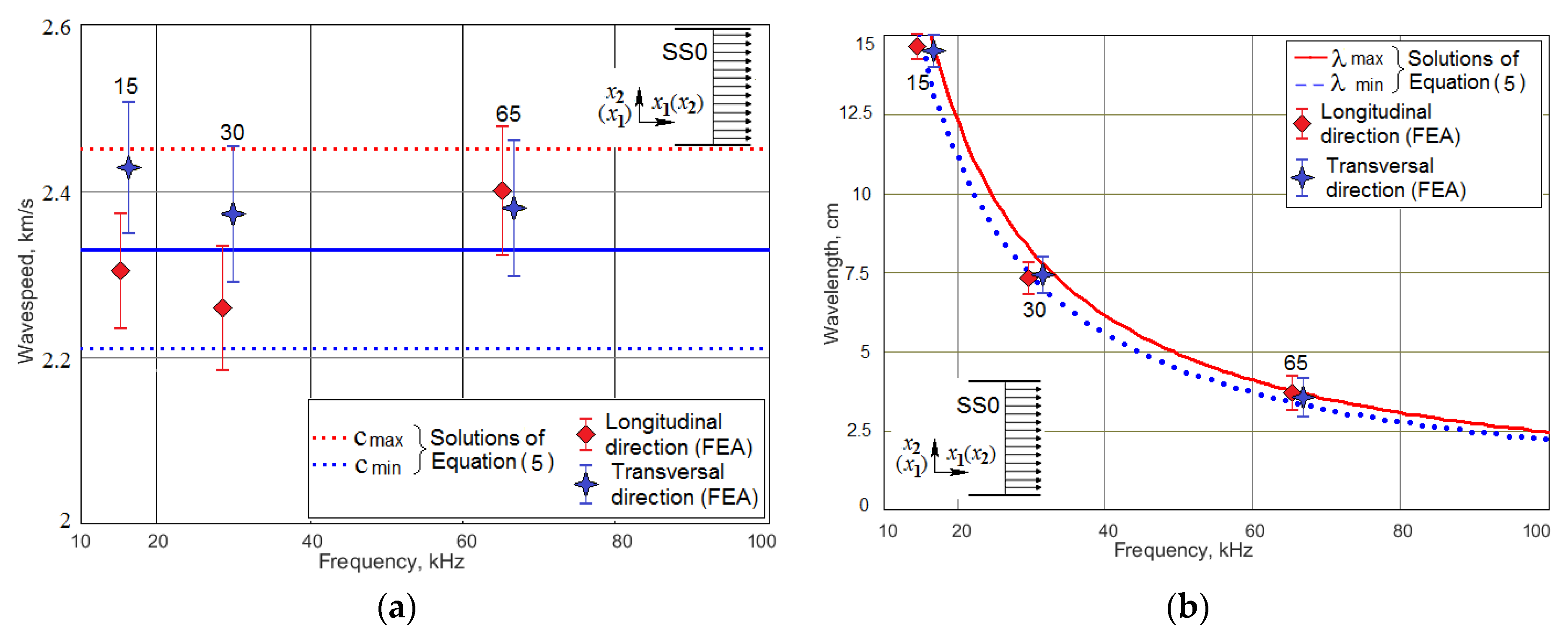
2.1. Dispersion Analysis of the Waves That Can Be Excited in CFRP Panel under Study
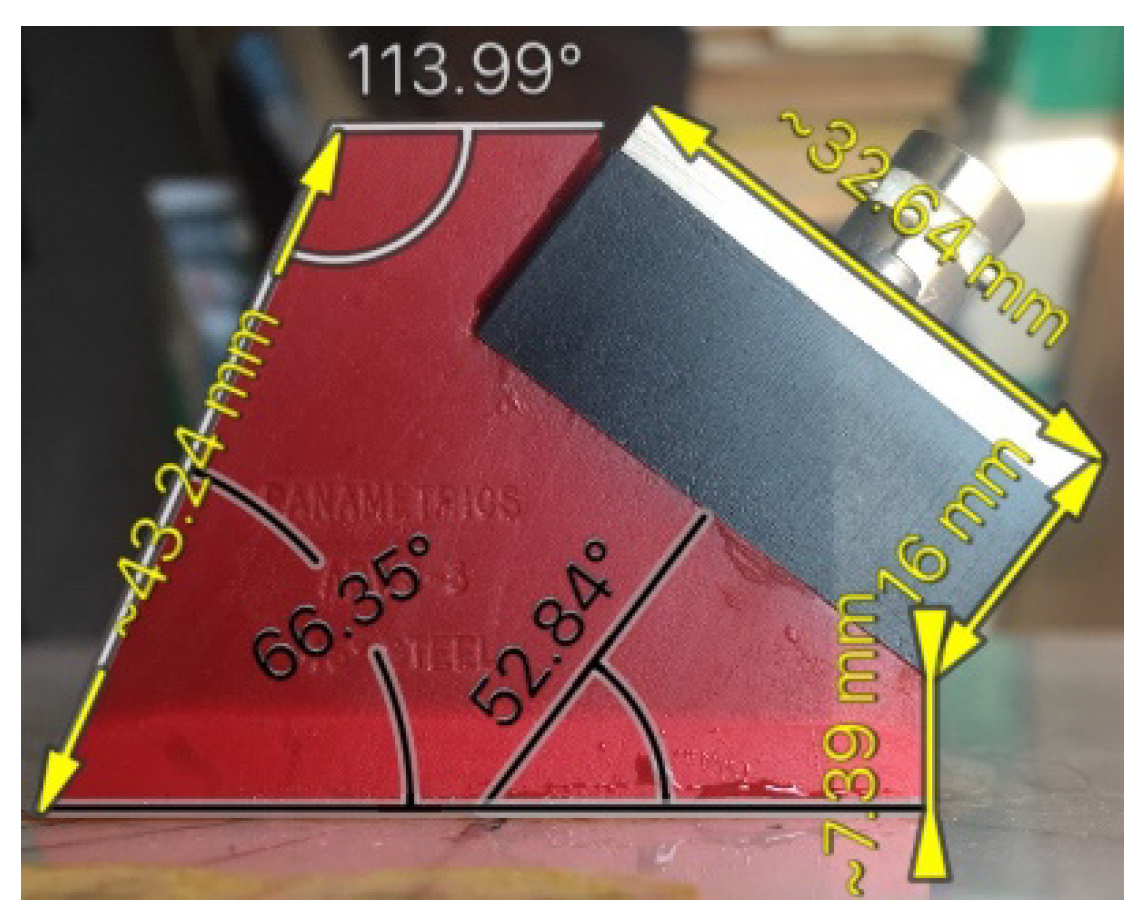
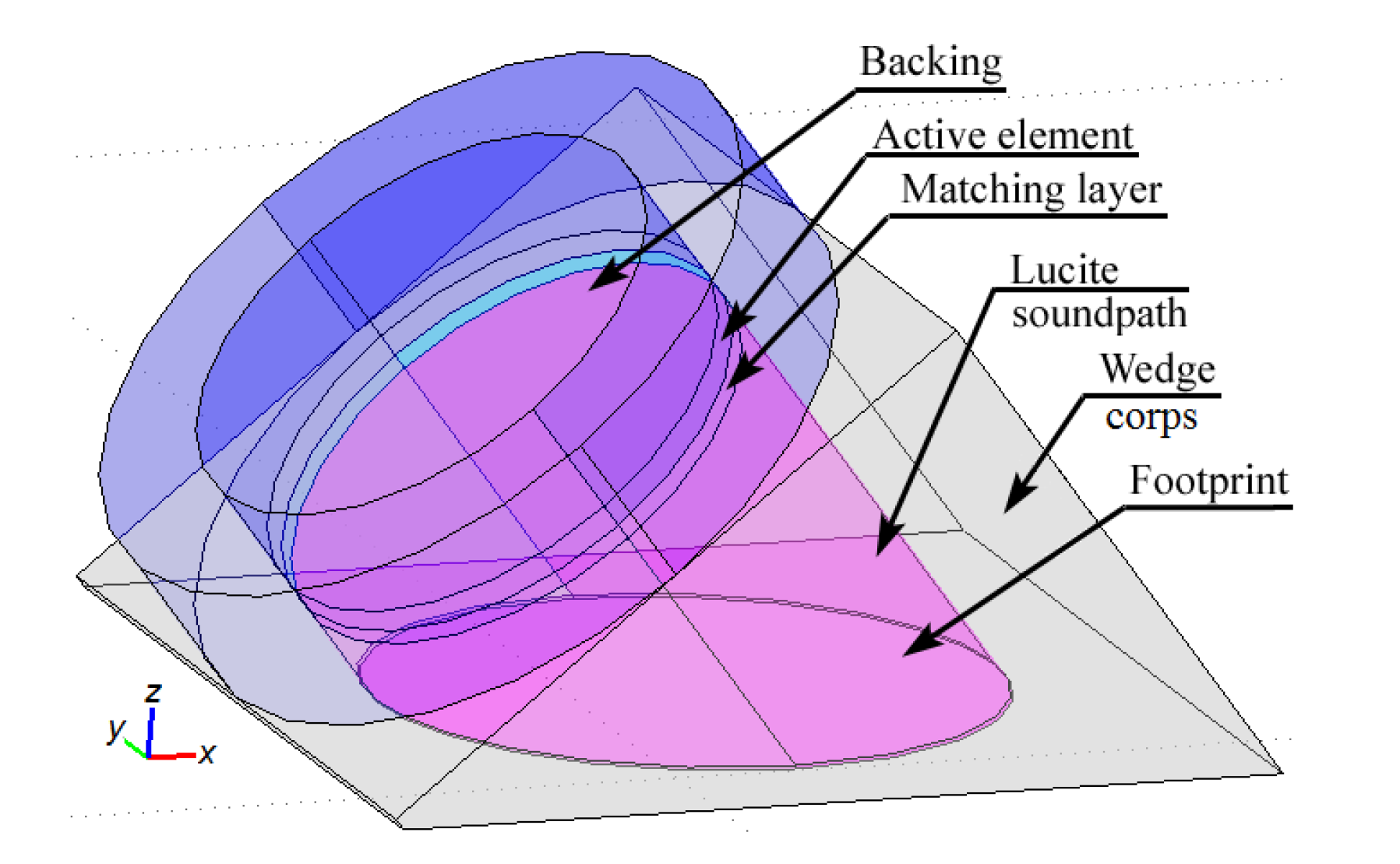
2.2. The Finite-Element Model of the Angle-Beam Wedge Actuator, Generating the Wave in a Thin CFRP Panel
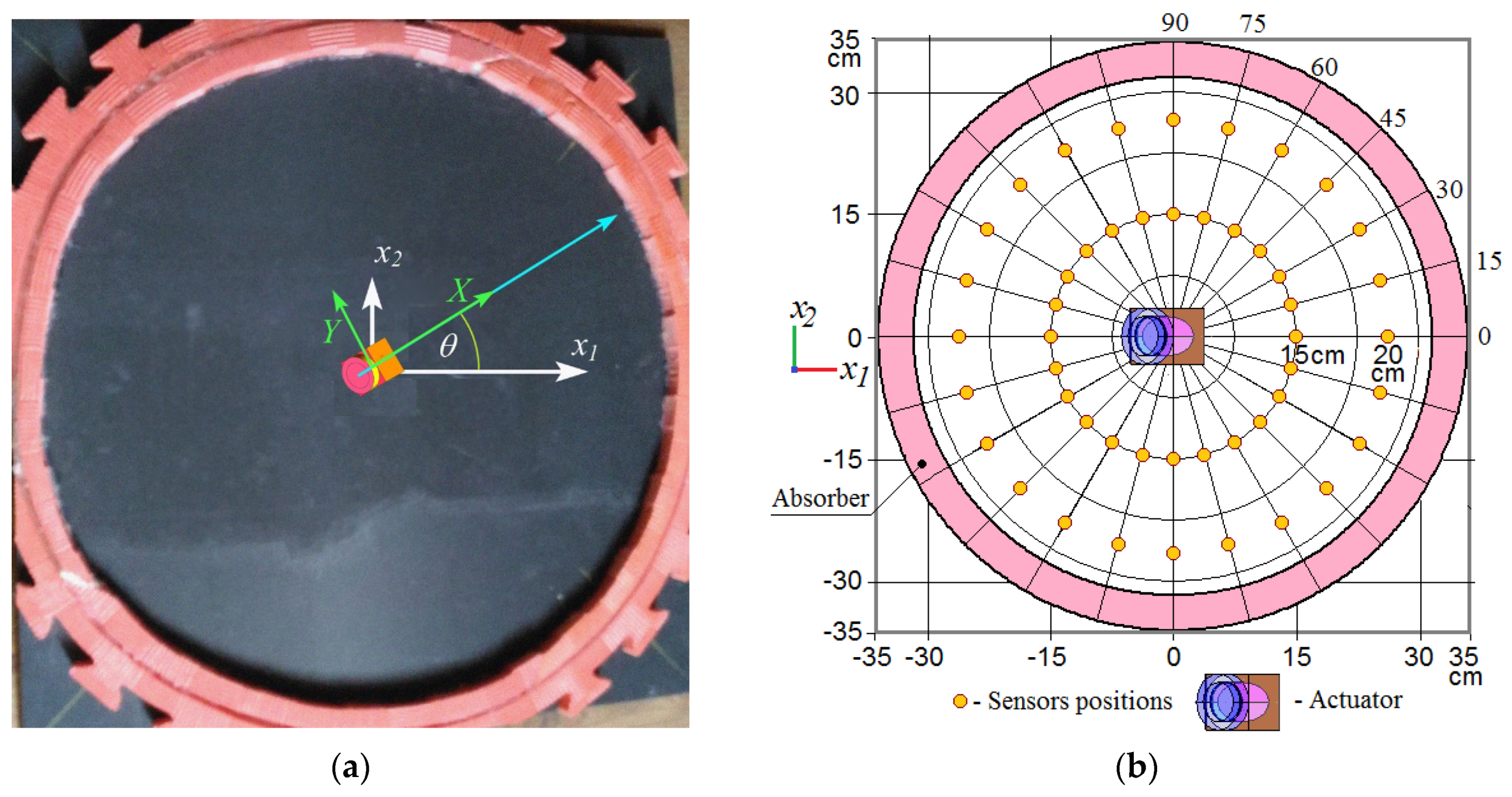
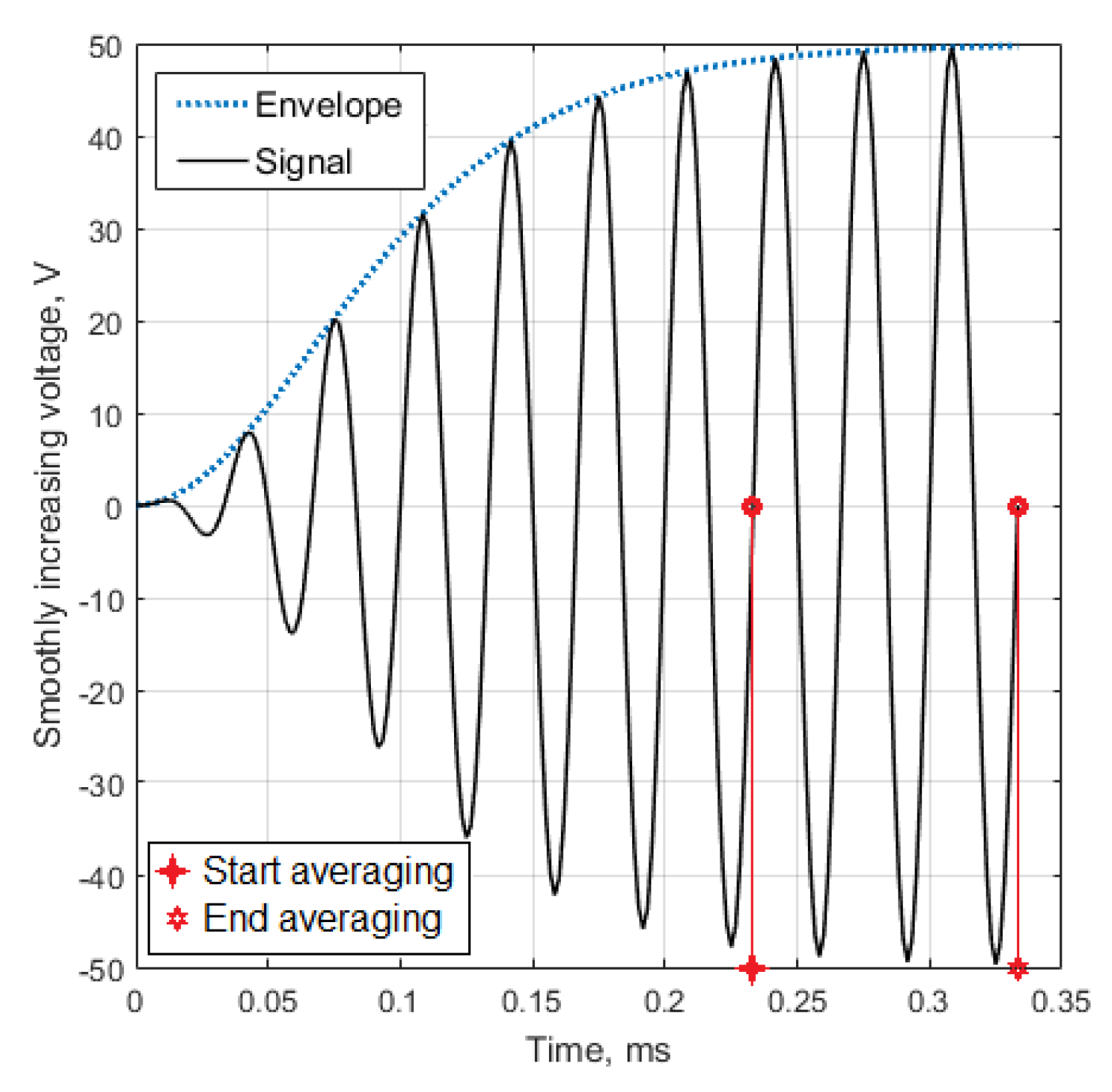
2.3. Investigation of the Wave Propagation Generated by the Oriented Angle-Beam Wedge Actuator in Orthotropic CFRP Panel: Experimental and Numerical Studies
3. Results and Discussion
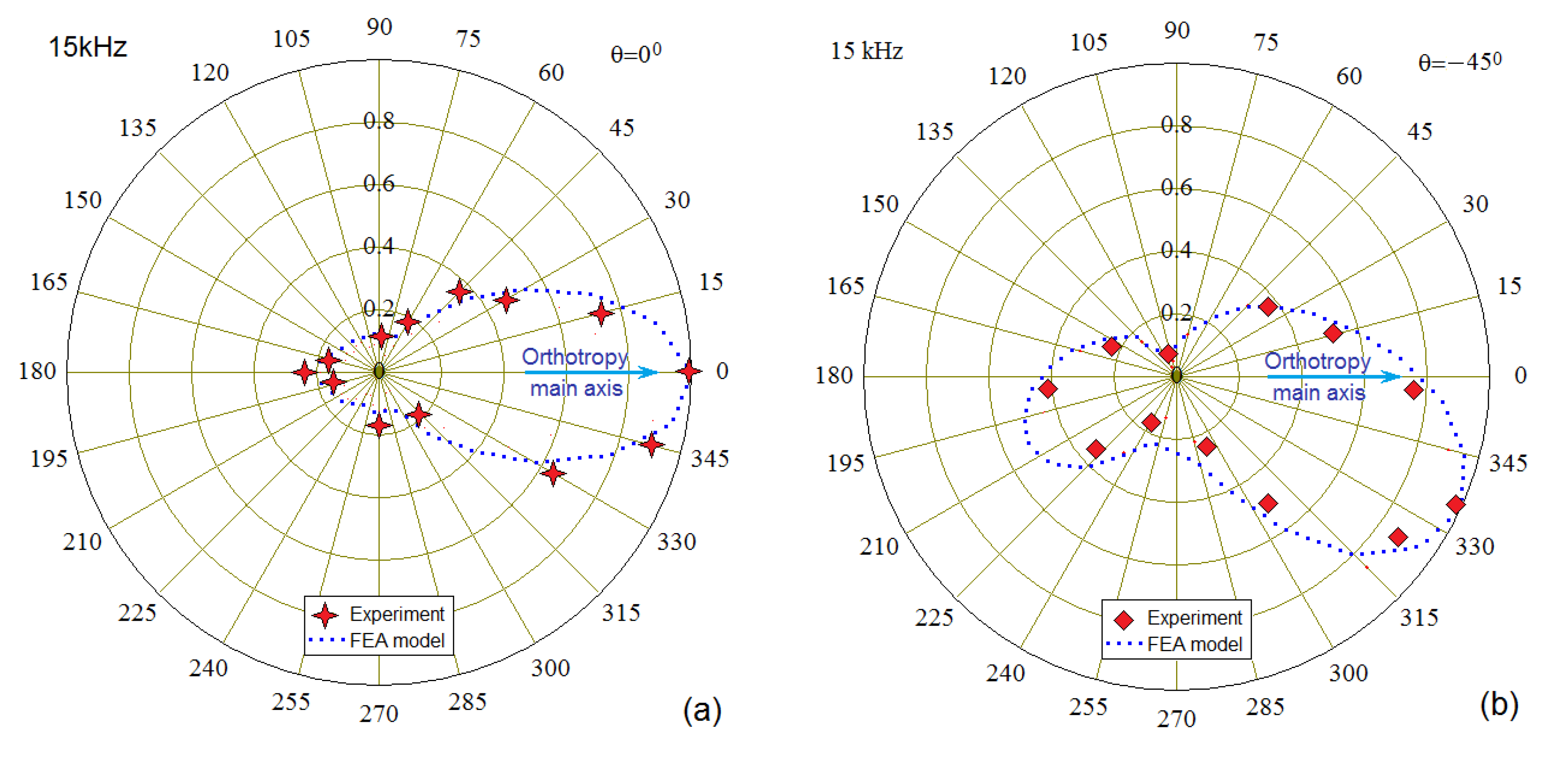
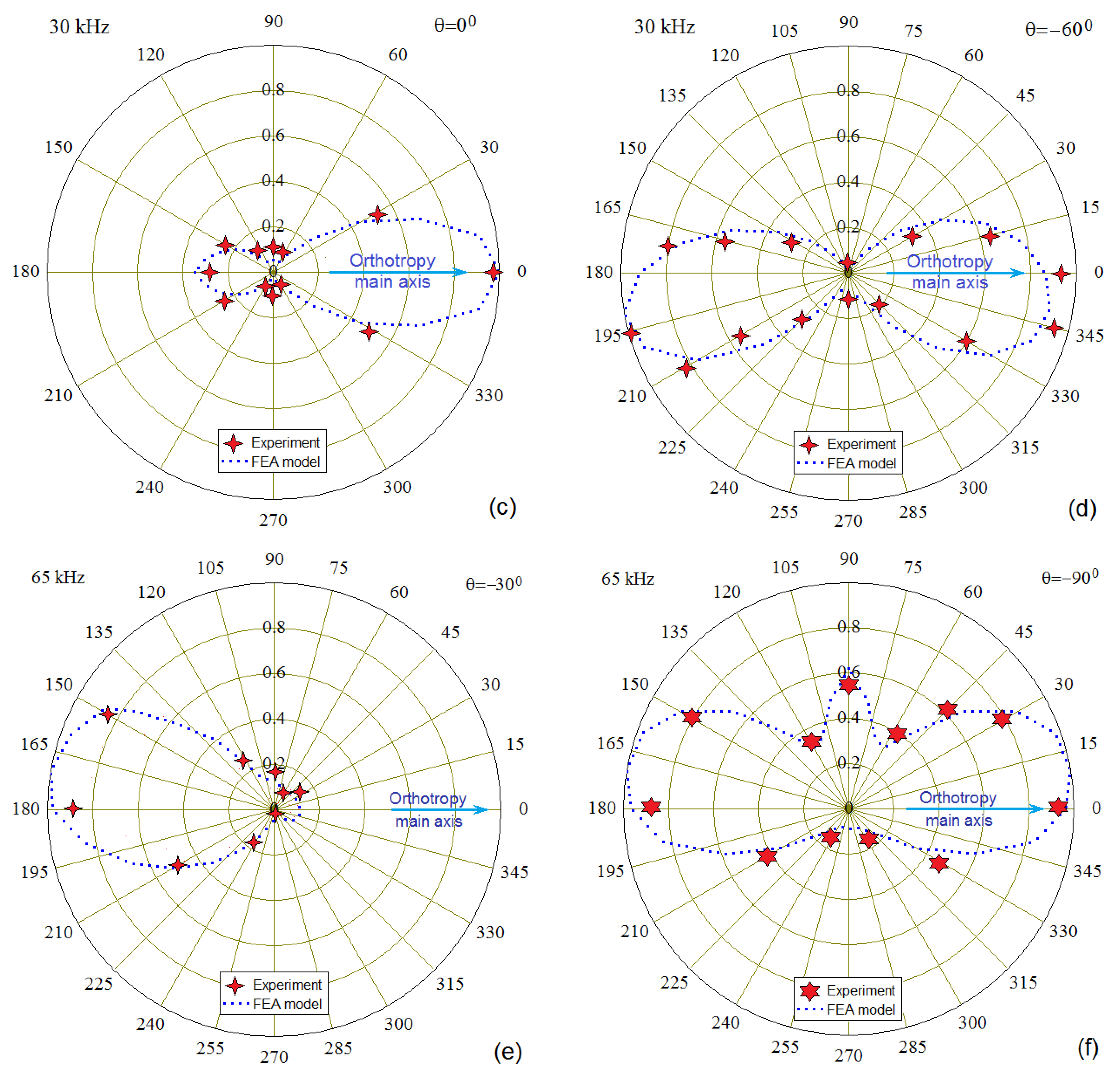
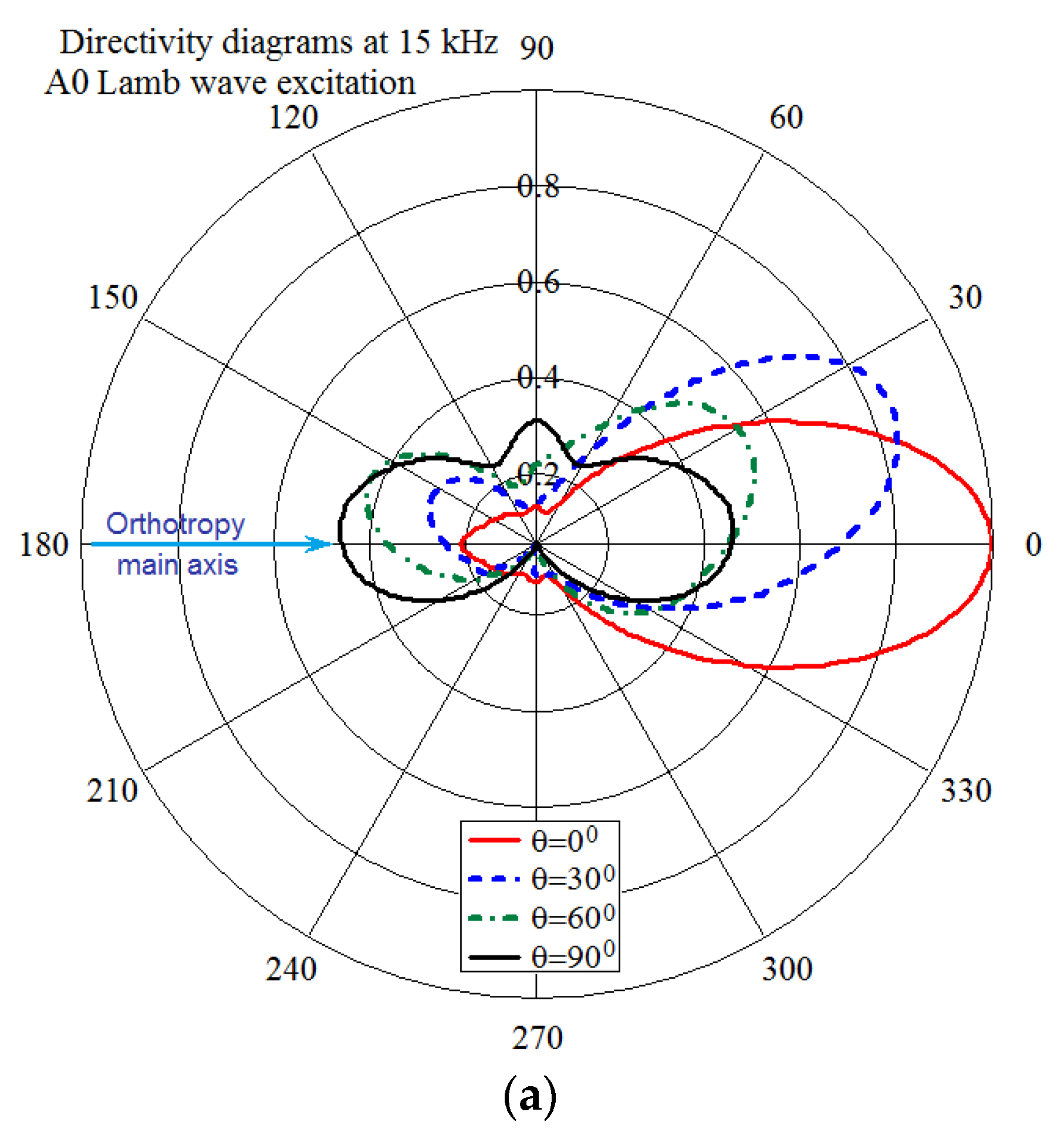
3.1. Comparison of the Experimentally Measured and Numerically Calculated A0 Wave Directivities
- -
- Wave propagation mainly in the direction of greatest structural stiffness and minimal attenuation;
- -
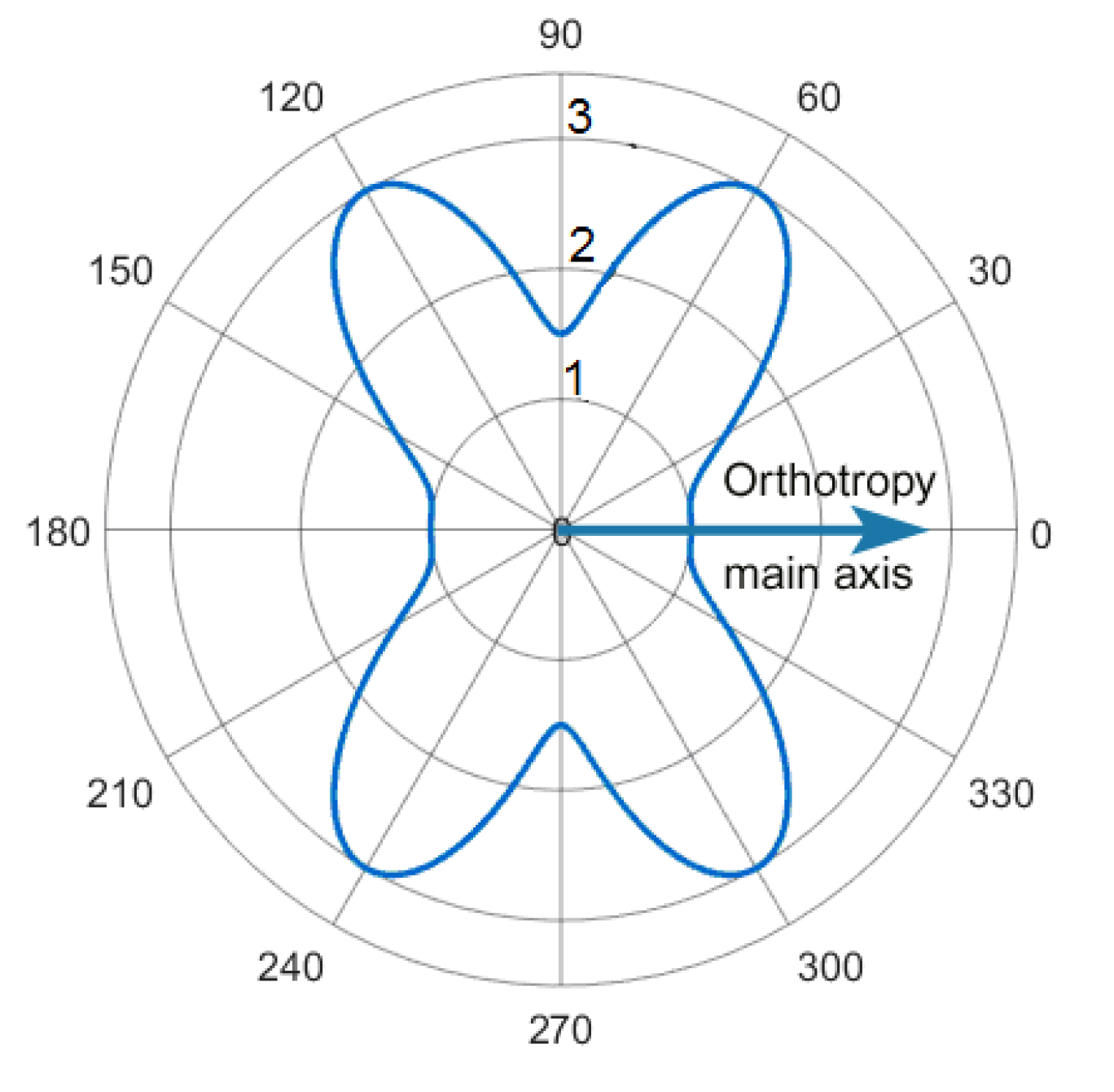
- Deviation of the maximum of the radiation directivity in the direction of the main axis of orthotropic anisotropy, which is confirmed by the fact that when the actuator rotates around an axis normal to the panel surface by a certain angle θ from the main axis, the directivity’s lobe rotates by a smaller angle (see Figure 11);
- -
- The reverse orientation of the wave relative to the orientation of the directional actuator when certain vibration modes are excited in it (see Figure 11c).
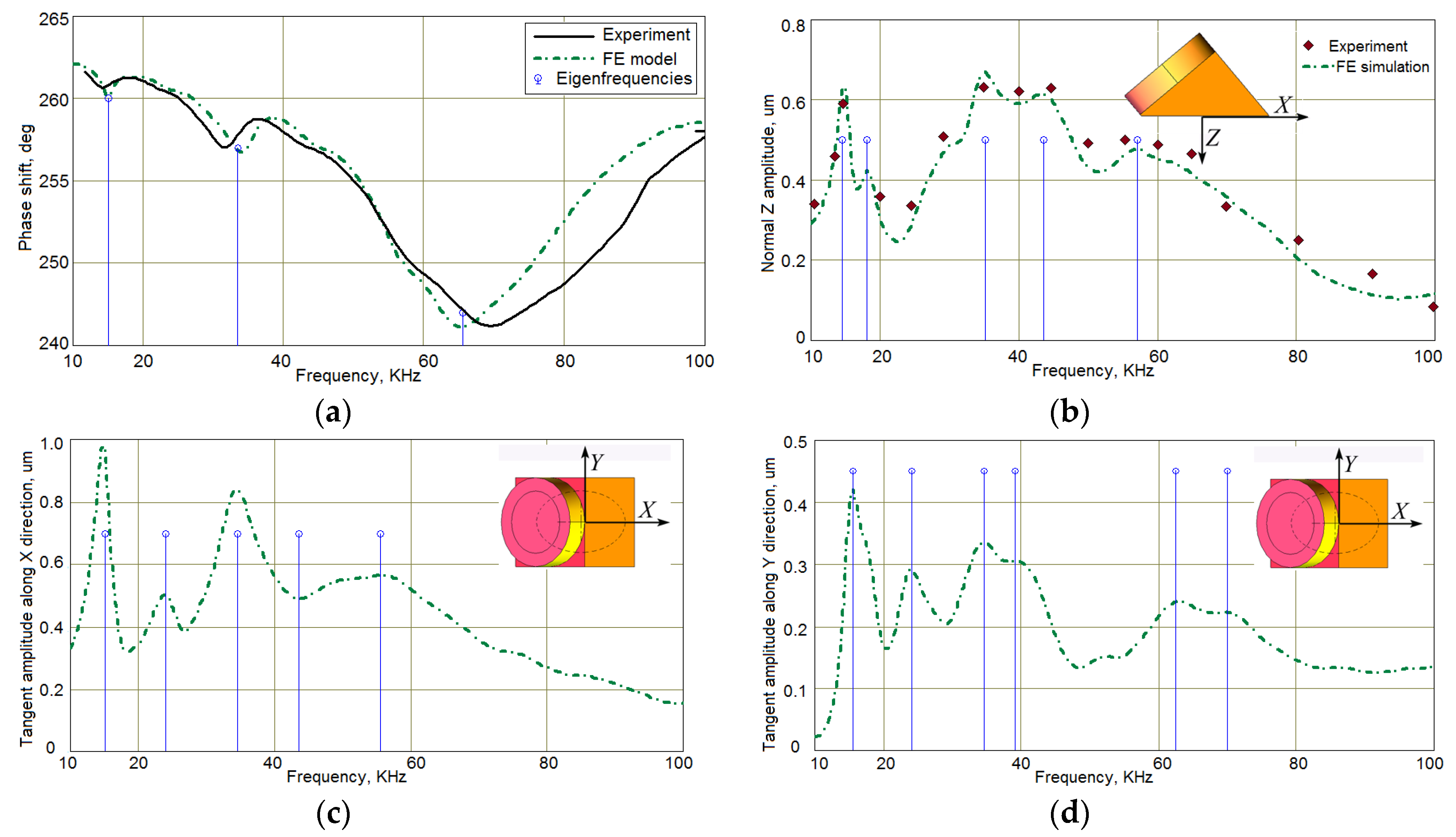
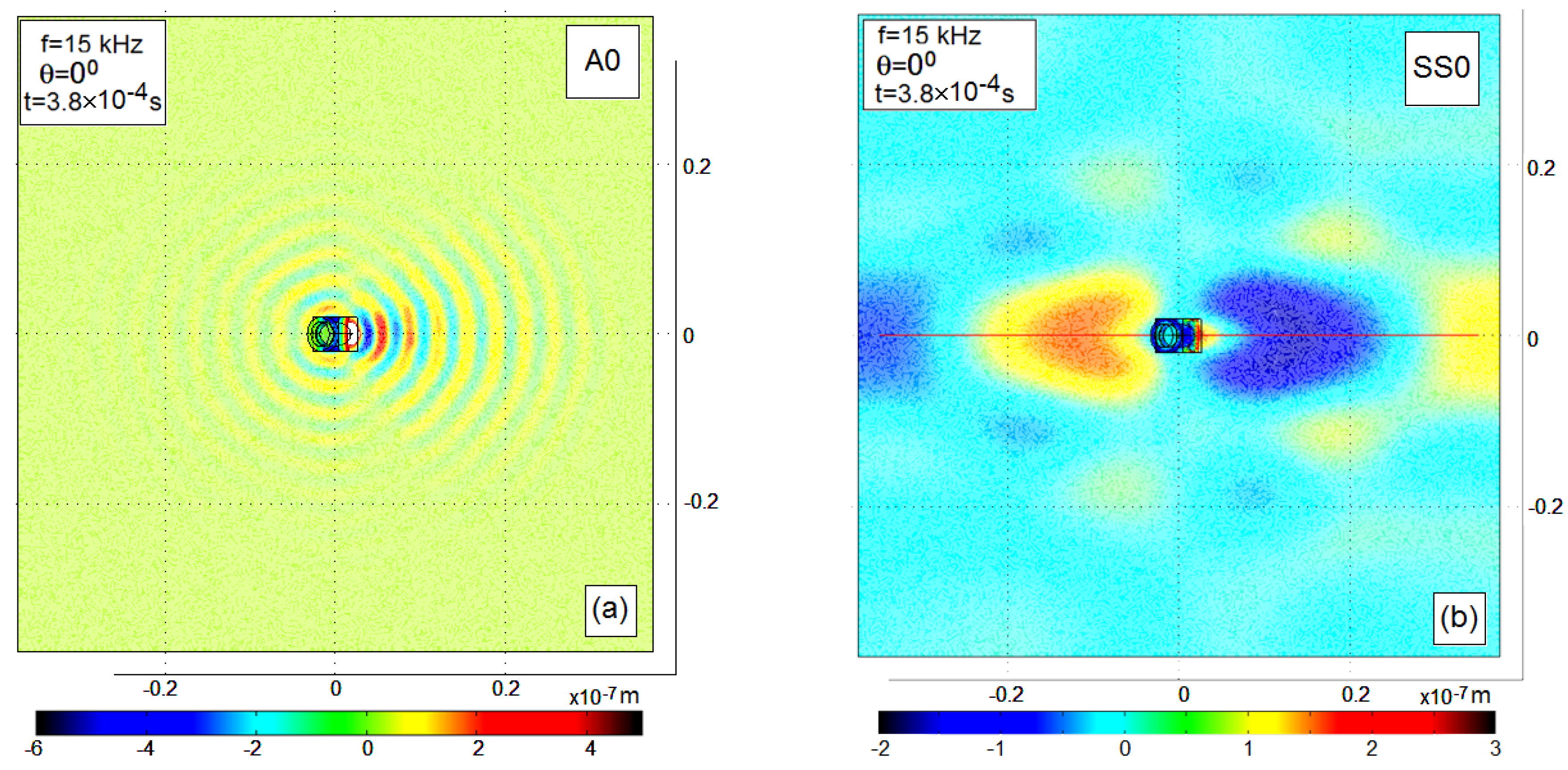
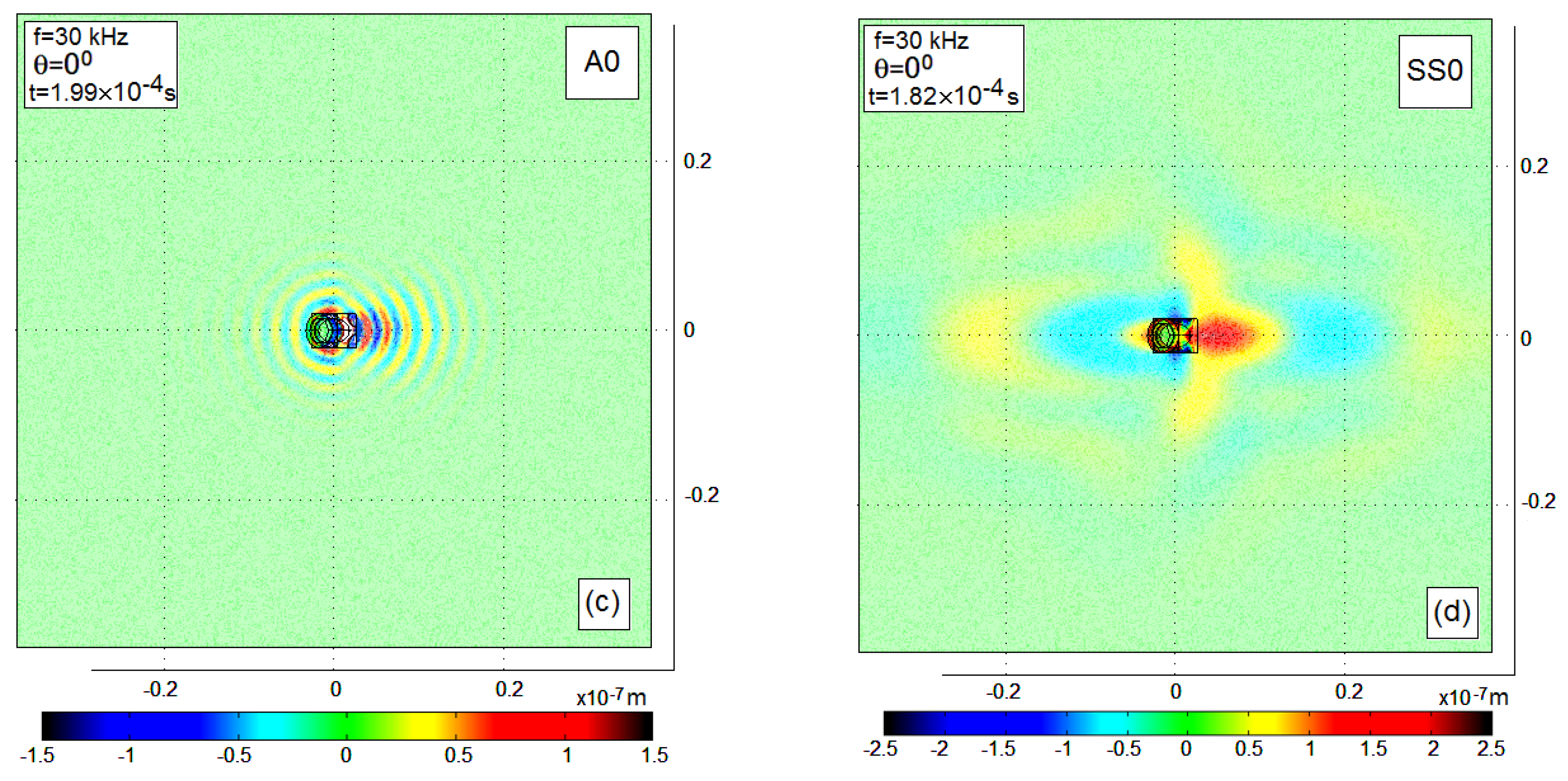
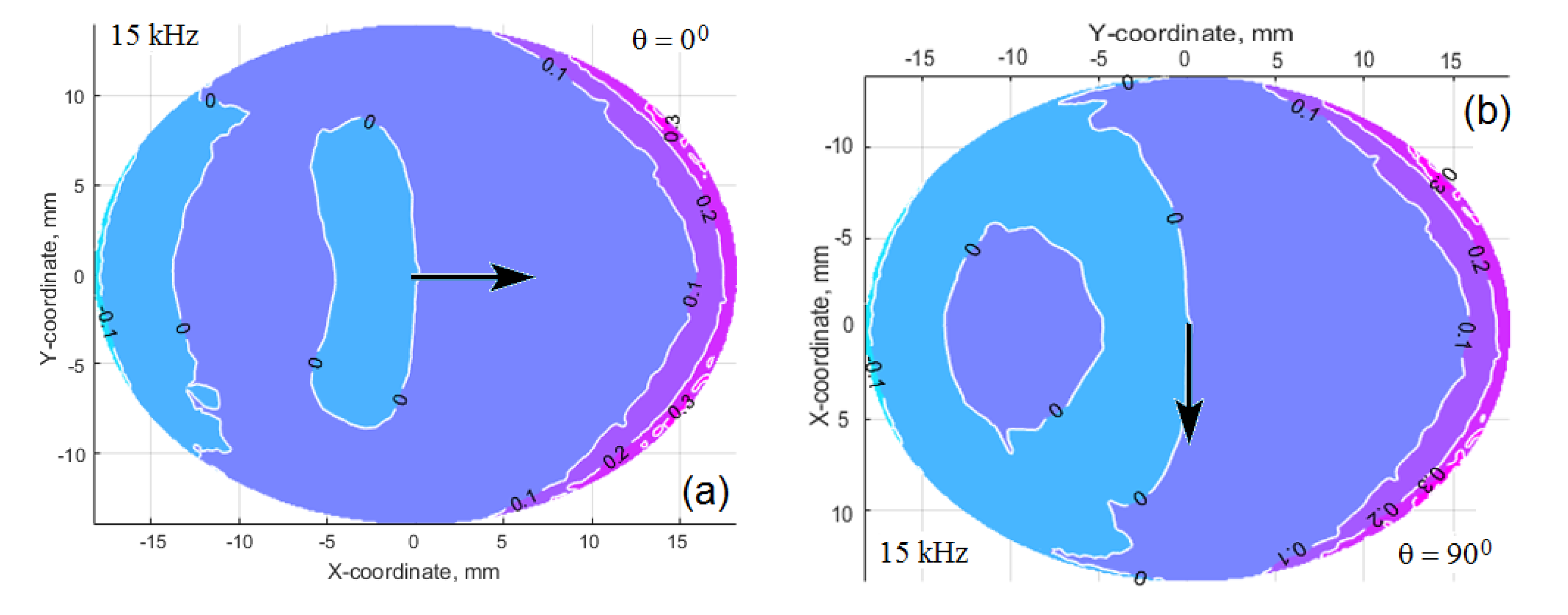
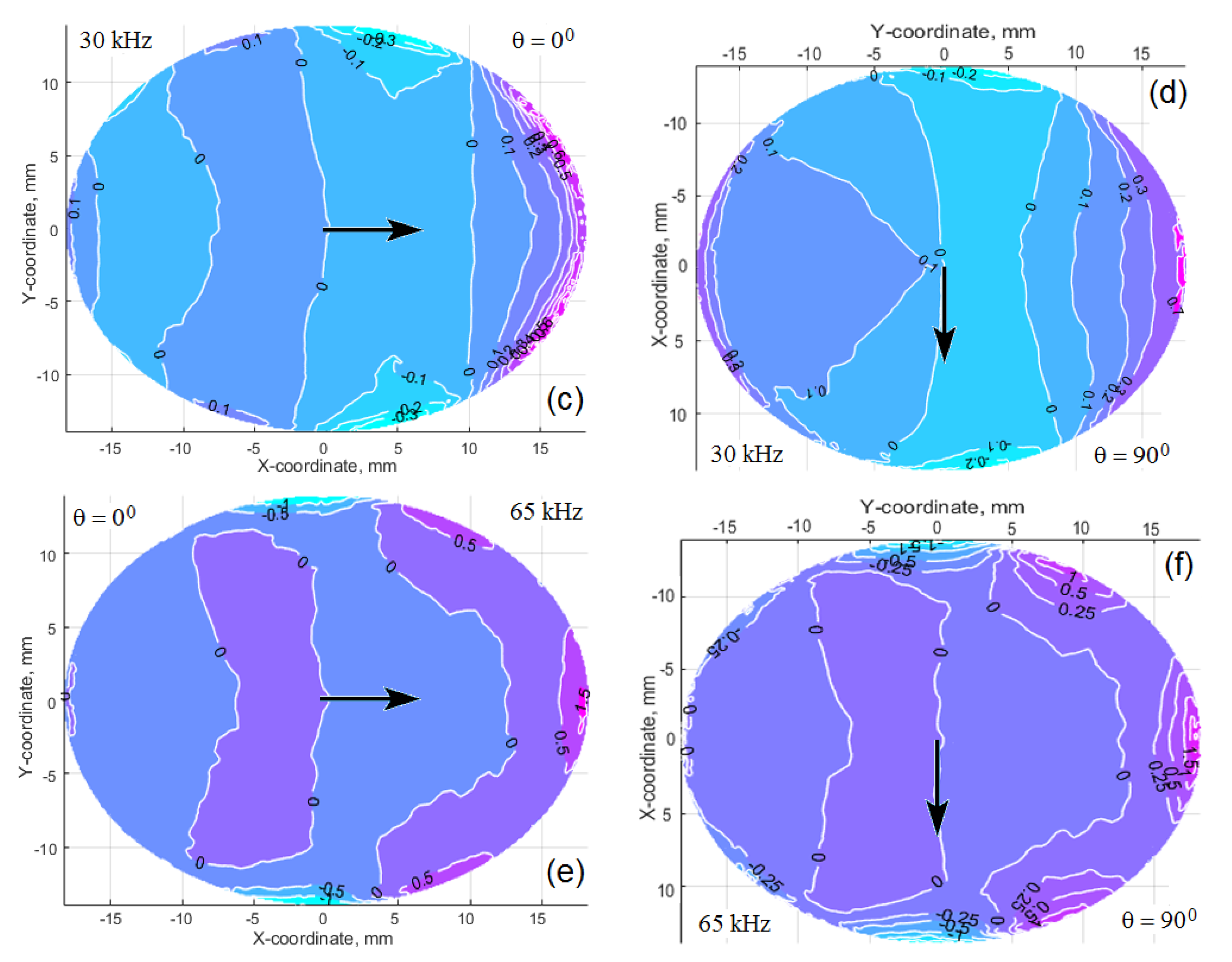
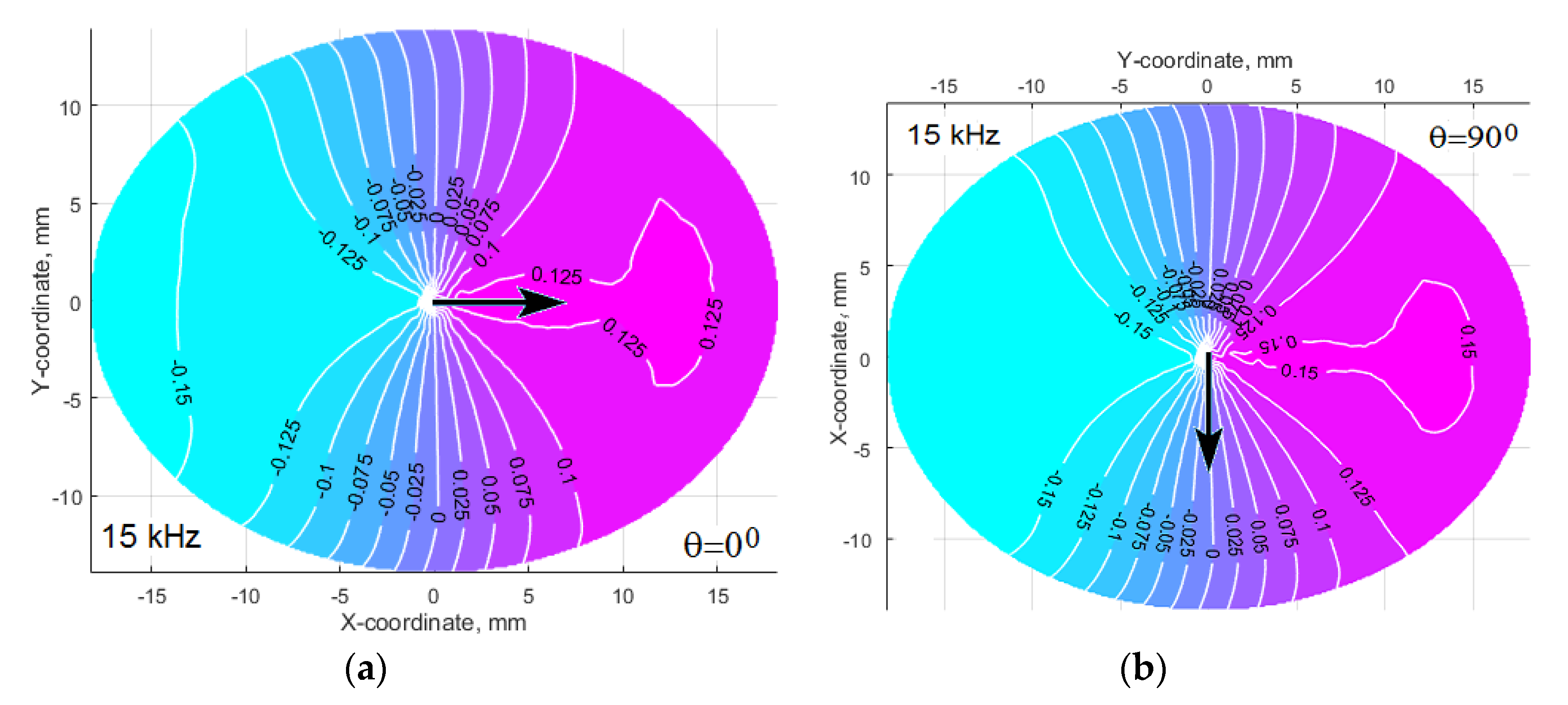
3.2. Interfacial Shear Stress and Radial Tangent Displacement Distributions: FE Simulation Results
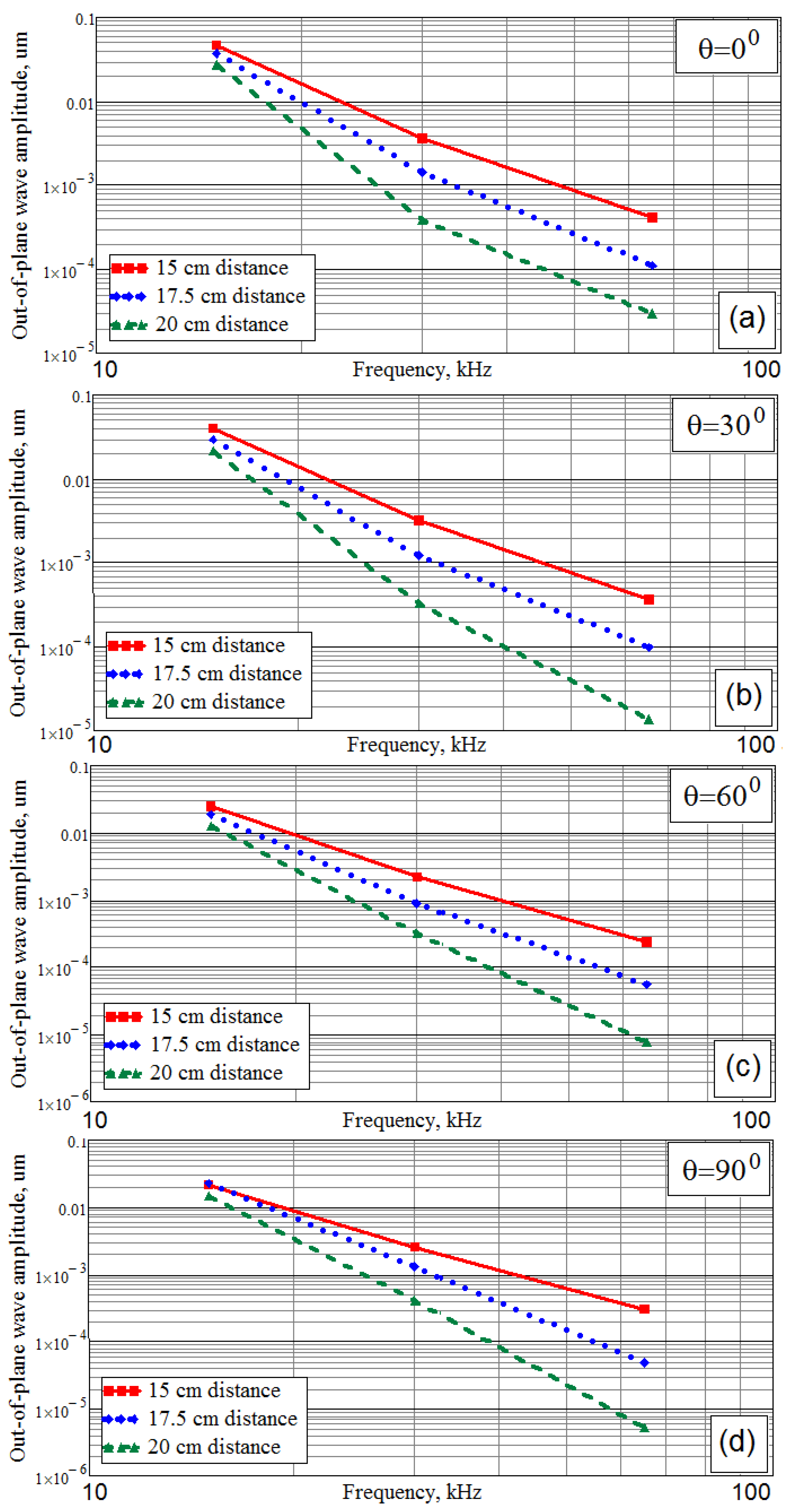
3.3. Attenuation of the Lamb Waves Generated by the Differently Oriented Wedge Actuator
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kessler, S.S.; Spearing, S.M.; Soutis, C. Damage Detection in Composite Materials Using Lamb Wave Methods. Smart Mater. Struct. 2002, 11, 269–278. [Google Scholar] [CrossRef] [Green Version]
- Kessler, S.S.; Rani, P. Pattern Recognition for Damage Characterization in Composite Materials. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Sun, Z.; Rocha, B.; Wu, K.-T.; Mrad, N.A. Methodological Review of Piezoelectric Based Acoustic Wave Generation and Detection Techniques for Structural Health Monitoring. Int. J. Aerosp. Eng. 2013, 2013, 22. [Google Scholar] [CrossRef]
- Andreades, C.; Malfense, G.P.; Meo, M.; Ciampa, F. Nonlinear ultrasonic inspection of smart carbon fibre reinforced plastic composites with embedded piezoelectric lead zirconate titanate transducers for space applications. J. Intel. Mat. Syst. Struct. 2019, 30, 2995–3007. [Google Scholar] [CrossRef]
- Gao, Y.; Li, Y.; Zhang, H.; He, X. Modeling of the Damping Properties of Unidirectional Carbon Fibre Composites. Polym. Polym. Compos. 2011, 19, 119–122. [Google Scholar] [CrossRef]
- Stepinski, T.; Manka, M.; Martowicz, A. Interdigital Lamb Wave Transducers for Applications in Structural Health Monitoring. NDT E Int. 2017, 86, 199–210. [Google Scholar] [CrossRef]
- Saravanos, D.A.; Chamis, C.C. Computational Simulation of Damping in Composite Structures. In NASA Technical Report; Lewis Research Center: Cleveland, OH, USA, 1989; p. 27. [Google Scholar]
- Ono, K.; Galego, A. Attenuation of Lamb Waves in CFRP Plates. J. Acoust. Emiss. 2012, 30, 109–123. [Google Scholar]
- Ramadas, C. Three-Dimensional Modeling of Lamb Wave Attenuation Due to Material and Geometry in Composite Laminates. J. Reinf. Plast. Comp. 2014, 33, 824–835. [Google Scholar] [CrossRef]
- Gresil, M.; Giurgiutiu, V. Prediction of Attenuated Guided Waves Propagation in Carbon Fiber Composites Using Rayleigh Damping Model. J. Intel. Mat. Syst. Struct. 2015, 26, 2151–2169. [Google Scholar] [CrossRef]
- Hu, N.; Liu, Y.; Peng, X.; Yan, B. Optimal Excitation Frequency of Lamb Waves for Delamination Detection in CFRP Laminates. J. Compos. Mater. 2010, 44, 1643–1662. [Google Scholar] [CrossRef]
- Han, K.; Lee, L.J. Dry Spot Formation and Changes in Liquid Composite Molding: I-Experimental. J. Compos. Mater. 1996, 30, 1458–1474. [Google Scholar] [CrossRef]
- Bertling, B.; Kaps, R.; Mulugeta, E. Analysis of dry-spot behavior in the pressure field of a liquid composite molding process. CEAS Aeronaut. J. 2016, 7, 577–585. [Google Scholar] [CrossRef] [Green Version]
- Im, K.-H.; Kim, H.-J.; Song, S.-J.; Hsu, D.K.; Lee, K.-S.; Yang, I.-Y.; Park, J.-W. Feasibility on Generation mechanism of Ultrasonic Shear Wave for the Application on Stacking Orientation Defect in CFRP Composite Laminates. AIP Conf. Proc. 2009, 1096, 1033–1040. [Google Scholar]
- Giurgiutiu, V. Tuned Lamb Wave Excitation and Detection with Piezoelectric Wafer Active Sensors for Structural Health Monitoring. J. Intel. Mat. Syst. Struct. 2005, 16, 291–305. [Google Scholar] [CrossRef]
- Raghavan, A.; Cesnik, C.E.S. Modeling of Guided-Wave Excitation by Finite-dimensional Piezoelectric Transducers in Composite Plates. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Schultz, A.B.; Tsai, S.W. Measurement of Complex Dynamic Moduli for Laminated Fiber Reinforced Composites. J. Compos. Mater. 1969, 3, 434–444. [Google Scholar] [CrossRef]
- Watanabe, Y.; Biwa, S.; Ohno, N. Experimental Investigation of Ultrasonic Attenuation Behavior in Carbon Fiber Reinforced Epoxy Composites. J. Soc. Mat. Sci. Jpn. 2002, 51, 451–457. [Google Scholar] [CrossRef]
- Shevtsova, M.; Kirillova, E.; Rozhkov, E.; Chebanenko, V.; Shevtsov, S.; Wu, J.K.; Chang, S.H. Piezoelectric Based Lamb Waves Generation and Propagation in Orthotropic CFRP Plates: I. Influence of Material Damping. Mater. Sci. Forum. 2019, 962, 218–226. [Google Scholar] [CrossRef]
- Shevtsova, M.; Kirillova, E.; Rozhkov, E.; Chebanenko, V.; Shevtsov, S.; Wu, J.K.; Chang, S.H. Piezoelectric Based Lamb Waves Generation and Propagation in Orthotropic CFRP Plates: II. Influence of Interfacial Stress Distribution. Mater. Sci. Forum. 2019, 962, 227–235. [Google Scholar] [CrossRef]
- Chinchan, L.; Shevtsov, S.; Soloviev, A.; Shevtsova, V.; Huang, J.P. Mechanical Testing of Polymeric Composites for Aircraft Applications: Standards, Requirements and Limitations. In Advanced Materials. Springer Proceedings in Physics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 152, pp. 201–221. [Google Scholar]
- Kamal, A.M.; Taha, I. Vibration Damping Behavior of Fiber Reinforced Composites: A Review. Key Eng. Mater. 2010, 425, 179–194. [Google Scholar] [CrossRef]
- Adams, R.D.; Fox, M.A.O.; Flood, R.J.L.; Hewitt, R.J. The Dynamic Properties of Unidirectional Carbon and Glass Fiber Reinforced Plastics in Torsion and Flexure. J. Compos. Mater. 1969, 3, 594–603. [Google Scholar] [CrossRef]
- Crane, R.M. Vibration Damping Response of Composite Materials. In David Taylor Research Center Report; David Taylor Research Center: Bethesda, MD, USA, 1991; p. 302. [Google Scholar]
- Hashin, Z. Complex moduli of viscoelastic composites—I. General theory and application to particulate composites. Int. J. Solid. Struct. 1970, 6, 539–552. [Google Scholar] [CrossRef]
- Vojiadjis, G.Z.; Kattan, P.I. Mechanics of Composite Materials with MATLAB; Springer: Berlin/Heidelberg, Germany, 2005; p. 336. [Google Scholar]
- Adams, M.R.; Maheri, M.R. Dynamic Flexural Properties of Anisotropic Fibrous Composite Beams. Compos. Sci. Technol. 1994, 50, 497–514. [Google Scholar] [CrossRef]
- Kim, I.; Chattopadhyay, A. Guided Lamb Wave–Based Structural Health Monitoring Using a Novel Wave Packet Tracing Method for Damage Localization and Size Quantification. J. Intel. Mat. Syst. Struct. 2015, 26, 2515–2530. [Google Scholar] [CrossRef]
- Ostiguy, P.-C.; Quaegebeur, N.; Bilodeau, M.; Masson, P. Semi-Analytical Modelling of Guided Waves Generation on Composite Structures Using Circular Piezoceramics. Proc. SPIE 2015, 9438, 94380K. [Google Scholar]
- Su, Z.; Ye, L. Selective Generation of Lamb Wave Modes and their Propagation Characteristics in Defective Composite Laminates. Proc. Inst. Mech. Eng. 2004, 218, 95–110. [Google Scholar] [CrossRef]
- Viktorov, L.A. Rayleigh and Lamb Waves: Physical Theory and Applications; Plenum: New York, NY, USA, 1967; p. 160. [Google Scholar]
- Bertoni, H.L. Design Considerations for Efficient Wedge Transducers. In Proceedings of the 3rd European Microwave Conference, Brussels, Belgium, 4–7 September 1973. [Google Scholar]
- Alphonse, G.A. The Wedged Transducer—A Transducer Design for Broad Band Characteristics. Ultrason. Imaging 1979, 1, 76–88. [Google Scholar] [CrossRef]
- Ditri, J.J.; Rajana, K.M. Analysis of the Wedge Method of Generating Guided Waves. Rev. Prog. Quant. Nondestruct. Eval. 1995, 14, 163–170. [Google Scholar]
- Rus, G.; Wooh, S.-C.; Gallego, R. Analysis and Design of Wedge Transducers Using the Boundary Element Method. J. Acoust. Soc. Am. 2004, 115, 2919–2927. [Google Scholar] [CrossRef]
- Jin, D.; Li, Z. Simulation and Optimization of Wedge-Shaped Ultrasonic Transducers Using Finite Element Method (FEM). Appl. Mech. Mater. 2013, 281, 112–115. [Google Scholar] [CrossRef]
- Zhao, X.; Schmerr, L.W., Jr.; Sedov, A.; Li, X. Ultrasonic Beam Models for Angle Beam Surface Wave Transducers. Res. Nondestruct. Eval. 2016, 27, 175–191. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Jeong, H.; Hu, H. Modeling nonlinear Rayleigh wave fields generated by angle beam wedge transducers—A theoretical study. Wave Motion 2016, 67, 141–159. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Jeong, H.; Hu, H. Modeling Linear Rayleigh Wave Sound Fields Generated by Angle Beam Wedge Transducers. AIP Adv. 2017, 7, 015005. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Li, X.; Jeong, H. Measurement of Rayleigh Wave Beams Using Angle Beam Wedge Transducers as the Transmitter and Receiver with Consideration of Beam Spreading. Sensors 2017, 17, 18. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shevtsov, S.; Chebanenko, V.; Shevtsova, M.; Kirillova, E.; Rozhkov, E. On the Directivity of Acoustic Waves Generated by the Angle Beam Wedge Actuator in Thin-Walled Structures. Actuators 2019, 8, 64. [Google Scholar] [CrossRef] [Green Version]
- Standard ASTM D 3039-95. Test Method for Tensile Properties of Polymer Matrix Composite Materials; ASTM: West Conshohocken, PA, USA, 1995.
- Standard D 5379-93. Test Method for Shear Properties of Composite Materials by V-Notched Beam Method; ASTM: West Conshohocken, PA, USA, 1995.
- Standard ASTM D 2344-84 (Reapproved 1989). Test Method for Apparent Interlaminar Shear Strength of Parallel Fiber Composites by Short Beam Method; ASTM: West Conshohocken, PA, USA, 1995.
- Barbero, E.J. Finite Element Analysis of Composite Materials with Abaqus; CRC Press: Boca Raton, FL, USA, 2013; p. 406. [Google Scholar]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: New York, NY, USA, 2014; p. 547. [Google Scholar]
- Li, Y.; Thompson, R.B. Propagation of Guided Elastic Waves in Orthotropic Plates. In Review of Progress in Quantitative Nondestructive Evaluation; Thompson, D.O., Chimenti, D.E., Eds.; Springer: Boston, MA, USA, 1989; pp. 189–196. [Google Scholar]
- Olympus NDT Instruments. Available online: Olympus-ims.com/en/ndt-instruments (accessed on 16 February 2020).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Young’s Moduli, GPa | Shear Moduli, GPa | Poisson’s Ratios | ||||||
|---|---|---|---|---|---|---|---|---|
| E1 | E2 | E3 | G12 | G23 | G31 | ν12 | ν23 | ν13 |
| 63 ± 12 | 22.5 ± 2.5 | 5 ± 1.5 | 9.6 ± 1.2 | 7.3 ± 0.6 | 7.8 ± 0.6 | 0.46 ± 0.06 | 0.32 ± 0.08 | 0.6 ± 0.1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shevtsov, S.; Chebanenko, V.; Shevtsova, M.; Chang, S.-H.; Kirillova, E.; Rozhkov, E. On the Directivity of Lamb Waves Generated by Wedge PZT Actuator in Thin CFRP Panel. Materials 2020, 13, 907. https://doi.org/10.3390/ma13040907
Shevtsov S, Chebanenko V, Shevtsova M, Chang S-H, Kirillova E, Rozhkov E. On the Directivity of Lamb Waves Generated by Wedge PZT Actuator in Thin CFRP Panel. Materials. 2020; 13(4):907. https://doi.org/10.3390/ma13040907
Chicago/Turabian StyleShevtsov, Sergey, Valery Chebanenko, Maria Shevtsova, Shun-Hsyung Chang, Evgenia Kirillova, and Evgeny Rozhkov. 2020. "On the Directivity of Lamb Waves Generated by Wedge PZT Actuator in Thin CFRP Panel" Materials 13, no. 4: 907. https://doi.org/10.3390/ma13040907
APA StyleShevtsov, S., Chebanenko, V., Shevtsova, M., Chang, S. -H., Kirillova, E., & Rozhkov, E. (2020). On the Directivity of Lamb Waves Generated by Wedge PZT Actuator in Thin CFRP Panel. Materials, 13(4), 907. https://doi.org/10.3390/ma13040907