1. Introduction
Mechanical face seals are used in rotating equipment such as pumps, mixers, blowers, and compressors. The seal incorporates both rigid and flexible elements that maintain contact at the sealing interface and slide on each other, allowing a rotating element to pass through a sealed case [
1,
2,
3]. A mechanical face seal used in hydraulic pumps is investigated in this paper, with a focus on random vibration loading [
4,
5].
Hydraulic pumps are widely used in air and space vehicle fuel systems because of their advantages of high effectiveness and fast response. Failure of a hydraulic pump can produce serious consequences and the working environment of the pump is complex, creating enormous challenges for mechanical face seal design. Particularly in aeronautic and astronautic applications, the random vibration effect requires close attention. To achieve a high level sealing performance for mechanical face seals, an investigation of the influence of random vibration on mechanical seals is imperative to enhance the working reliability of hydraulic pumps.
The main components of a face seal are two rings, the stator, and the rotor, which are arranged perpendicular to the axis of the rotating shaft, as shown in
Figure 1. The stator and the rotor keep fit under the force of fluid pressure and compensating mechanism. There are two degrees of freedom in the motion between the stator and rotor, which are the axial motion and the circumferential rotation. The contact between the stator and the rotor is the key to determining the performance of the mechanical face seal [
6], and they can run in any of the following three lubrication regimes [
7,
8].
Full film lubrication regime: The seal face is separated by a sufficiently thick film and there is no contact between the stator and rotor. In this case, the friction and wear of the seal faces can be significantly reduced, however, fluid leakage could be excessive.
Boundary lubrication regime: The boundary film is partly discontinuous and there are solid contacts in some areas. Fluid pressure has not developed enough to separate the sealing faces, but it can obviously reduce friction and wear.
Mixed lubrication regime: This is the most common operation mode in many cases. Under these circumstances, part of the load is carried by mechanical contact, while a majority of the load is carried by fluid pressure. In this regime, friction and wear are relatively moderate and fluid leakage is very low.
Various scholars have explored the dynamics of mechanical seals, including Greenwood and Williamson [
9], who presented a contact model based on Hertzian theory. A plastic contact model was then proposed by Pullen and Williamson [
10] a few years later. Dayan et al. [
11] and Zou et al. [
12] simulated the dynamics of mechanical face seals to prevent possible contact between surfaces, and Pustan et al. [
13] presented theoretical models and experimental investigations of an internal mechanical seal with oscillating stator. The hydrostatic effect on the mechanical seals with oscillating stator was also examined. Minet et al. [
14] analyzed and modeled the morphology of the mechanical seal face, and research by Leishear et al. [
15] illustrated that relative vibrations between the stator and rotor affect the fluid film, damage the faces, and decrease the life of the seals. It was also determined that the smaller the axial damping between the two rings, the larger the impact force on the surface.
Random vibration has a significant influence on the axial direction of mechanical seals because it alters the lubricating regimes. Significant efforts have been made to study the random vibration responses of such systems [
16,
17,
18]. Influence analysis under random vibration loading is more complicated than under conventional loading. Many methods have been put forward to facilitate such analysis, including stochastic averaging technique [
19], the statistical linearization technique [
20], and the equivalent nonlinear system method [
21]. Under vibration loading, mechanical face seals are in an unsteady state. Varney [
22] analyzed the vibration of a noncontacting mechanical face seal caused by misalignment or imbalance. However, few authors have focused on exploring the influence of external random vibration loading on the mechanical face seals.
The focus of this study is the mechanical face seal used in air and space vehicles under random vibration loading. This study takes the surface roughness into account in the statistical sense from a macro perspective. As a small but unique contribution to this area of research, a spectrum analysis method based on frequency domain, and the root mean square (RMS) analysis method are presented to theoretically investigate the random vibration response characteristics. The research conclusions provide guidance for future robustness design under random vibration loading and to reduce wear in engineering applications.
This paper is organized as follows:
Section 1 presented an introduction to the work carried out in this paper. In
Section 2, the mathematical model of mechanical face seals under random vibration loading is derived.
Section 3 provides the flow of numerical calculation, and numerical experiments and analysis are conducted in
Section 4. Finally,
Section 5 presents the conclusion.
2. Modeling of Mechanical Face Seals under Random Vibration Loading
2.1. Description of the Mechanical Face Seal
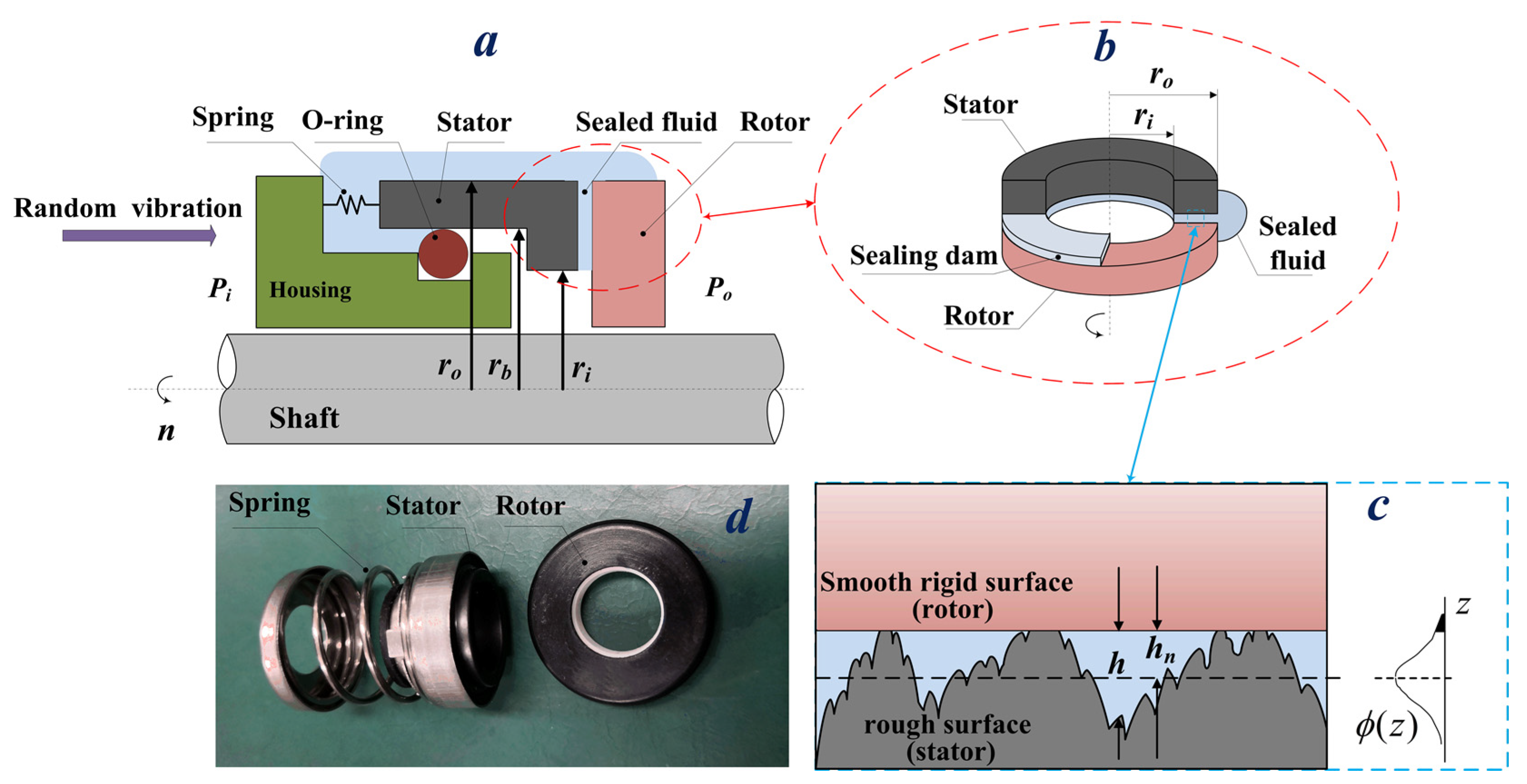
A typical mechanical face seal configuration is presented in
Figure 1a. The stator is flexibly mounted to the housing via two elastic parts: a radial support spring and a viscoelastic secondary seal O-ring. The spring supplies a closing force to the stator and the rotor rotates together with the shaft. The inner and outer radii are denoted as
ri and
ro, respectively,
rb is the balance radius, and the sealed fluid pressure and atmosphere pressure are
Po and
Pi, respectively. Random vibration from the environment is then transmitted to the housing. The nominal surfaces are flat and parallel, as shown in
Figure 1b, and a sealing dam is formed between the rotor surface and the stator surface. The stator should be rough, whereas the rotor is smooth, as shown in
Figure 1c. Additionally,
ϕ(z) is the probability density function of the surface height distribution,
hn is the nominal film thickness, and
h is the local film thickness for rough surfaces. The material used in the rotor is SiC (silicon carbide), and the material used in the stator is resin-impregnated carbon. The seal rings sample are presented in
Figure 1d. The fluid used in the mechanical face seal is aviation hydraulic oil, which has a density of 870 kg/m
3 and a kinematic viscosity of 10 mm
2/s. Therefore, its dynamic viscosity is 8.7 × 10
−3 Pa·s [
23].
2.2. Fluid Analysis
The output of the model is the fluid pressure distributed at the sealing interface. The fluid pressure
p(
r) is governed by Reynolds equation [
24], and average Reynolds equation [
25] is usually applied to study fluid flow at the interface between the stator and the rotor. As shown in
Figure 1b, the fluid film not only lubricates the interface surface and reduces friction and wear, but also supports the mating surface through the hydrodynamic effect. The average Reynolds equation is:
where
r is the radial direction,
α is the angular coordinate,
μ is the dynamic viscosity of the lubricant,
ω = ∂
α/∂
t is the relative angular speed,
hn is the nominal film thickness and is related to the axial load of mechanical face seals.
D is a universal variable that can be related to the fluid pressure
p or the density
ρ, depending on whether cavitation occurred or not.
F is a switch function that allows us to describe whether cavitation occurs or not.
In this equation, ρ and ρ0 are the local and liquid densities, respectively, and pcav is the cavitation pressure. These parameters are assumed to be constant in the present study.
When preparing mathematical models, particular assumptions are made which include:
This is a macro perspective, and the axial motion of mechanical face seal can be considered as a series of quasi-static process.
When the axial-symmetric configuration is taken into account, then ∂p/∂α = 0 and ∂hn/∂α = 0.
Installation misalignment is neglected.
The lubricated fluid is incompressible and Reynolds equation is taken into account for smooth surfaces [
26].
Because of low heat generation, the influence of temperature change is ignored and constant viscosity of the medium is assumed.
Mechanical seals usually work under mixed lubrication regime. The asperities interact with each other and are in a quasi-static process so that the squeeze term can be neglected [
26] in the evaluation of the fluid pressure.
thus, Reynolds equation can be simplified as:
Equation (3) is then integrated to obtain the fluid pressure
p(r) as follows:
where
p(
r) represents the distribution of pressure along the radial direction, the meaning the fluid pressure
Ff is:
2.3. Asperity Contact Mechanics Analysis
In the case of boundary lubrication and mixed lubrication conditions, asperity contact occurs and the influence of asperity contact pressure on mechanical face seals cannot be neglected. Greenwood and Williamson proposed a model (G-W model) to calculate the asperity contact pressure [
9]. In the G-W contact model, contact between two rough surfaces is reduced to that of contact between a smooth rigid surface and a rough surface. Independent Hertz contact is assumed to occur, as shown in
Figure 1c. It is also assumed that the asperities have spherical summits, all with constant radius
Re, and the asperity deformation is pure elastic deformation. According to the G-W model, the asperity contact pressure
pac is given by:
where
ϕ(z) is the probability density function of the surface height distribution,
(z,
t) is the average value of film thickness,
ηe is the equivalent surface density of the asperities,
Wa is the total asperity contact load,
An is the nominal contact area, and
Ee is the equivalent elastic modulus. The surface equivalent roughness
σe is defined as the root mean square roughness of stator and rotor surfaces heights [
14].
The probability density function of the surface height distribution
ϕ(z) is taken as:
Lebeck [
7] proposed that the plausible value for mechanical contact pressure
pc is the compressive yield stress
SC. The contact interface portion of mechanical seal can be estimated by normal cumulative distribution function:
The interfacial contact pressure can be expressed as:
Thus, the asperity contact load
Fc is given as:
2.4. Mass-Spring-Damping Model
The mass-spring-damping model has two degrees of freedom: the axial motion and the circumferential rotation around the seal’s axis of the stator and rotor. Random vibration loading mainly affects the axial direction of the mechanical face seal. The following discussion focuses on an analysis of the axial force.
A schematic of the mass-spring-damping model is provided in
Figure 2a. The mechanical face seal in the axial direction is abstracted as a mass-spring-damping system under random vibration loading. The housing is fixed to the pump and can be regarded as a moving base, while the O-ring produces the damping effect and the spring generates elastic force. A mass-spring-damping system with a discrete mass
m, damping coefficient
C, and spring stiffness
K is placed on a moving base with acceleration
.
It is assumed that the mechanical seal is in a state of equilibrium in its initial state, that is, the closing force Fcl equals the opening force Fo. The purpose of this is to facilitate the study of response characteristics of mechanical seals under random vibration.
The closing force
Fcl consists of hydrostatic pressure
Fp and seal spring force
Fs,
, and
Fcl is given by:
The opening force
Fo consists of fluid pressure
Ff and asperity contact load
Fc, and
Fo is given by:
In the initial state, the opening force balances the closing force:
In the case of random vibration loading input, in the axial direction of mechanical seal,
, that is:
where
Fe denotes force other than damping force and seal spring force, according to the principle of superposition, and the initial value of
Fe is assumed to be zero. A relative displacement is then defined as:
Substituting the relative displacement terms into Equation (14) provides:
By convention,
,
, where
ωn is the natural frequency and
ξ is the damping ratio. The final equation yields:
The derivation is continued in
Appendix A (Equations (A1)–(A18)). The excitation takes the form of a base input power spectral density. The root mean square (RMS) value of the response of the mass-spring-damping system can be expressed as:
The acceleration power spectral density (PSD) of mechanical seals is shown in
Figure 2b, as given by documents such as the MIL-STD-810G METHOD [
27]. In
Figure 2b, ascending spectrum is from 20 Hz to
f1, flat spectrum is from
f1 to
f2, and descending spectrum is from
f2 to 2000 Hz. The values of
f1 and
f2,
W1,
W2, and
W3 are obtained from specific tests. It is common to use the 3-sigma (3σ) values of the acceleration responses for verification of the mechanical structure design. The calculated
value is equal to 1σ value. In this work, it is assumed that the mean value of random vibration response spectrum is zero and is Gauss distribution with a probability density of:
The 3-sigma approach can be applied to analyze the lubrication state of mechanical face seals in which
Fv denotes the equivalent force caused by random vibration loading, and can be expressed as:
Because of the existence of Fv, the mechanical face seal is no longer in initial equilibrium state, Fv is the increase value of closing force Fcl, and the opening force Fo also changes with it.
2.5. Duty Parameter
The duty parameter
G was put forward by Stribeck following his investigation into bearing lubricity. Scholars including Sommerfeld, Gumbel, and Hershey have since applied this similarity number of friction characteristics in the field of sealing technology [
28]. The duty parameter indicates the operating condition of mechanical seals and the magnitude of the hydrodynamic effect in the fluid film, that is, it could express the friction characteristic of mechanical seals. The duty parameter of mechanical seals is defined as the ratio of the viscosity force of the liquid film between the end faces and the closing force of the seal faces
Fcl:
A method in which friction regime is judged by the duty parameter
G was put forward by Chen [
29]. The relationship between the lubrication regime of mechanical seals and the duty parameter
G is listed in
Table 1.
2.6. Wear Model
In the present work, Archard wear model is applied to calculate the local wear rate [
30]:
where
V is the volume loss,
L is the sliding distance,
KW is the dimensionless wear coefficient,
H is the hardness of the stator,
FW is the normal force, and wear is mainly caused by the asperity contact, so
FW equals
Fc. Because the rotor is much harder than the stator, it is assumed that the wear only takes place on the stator surface.
The wear modulus
kw is defined as
KW/H, so the wear model can be rewritten as:
The wear depth
hw is given as:
Wear modulus
kw is commonly evaluated through experiments under specific lubricated conditions. When the shaft is rotating under random vibration loading, the lubrication conditions vary with time. The 3-sigma approach can be applied to calculate the
FW of mechanical face seals under random vibration loading. The derivative of the loss of volume with respect to sliding distance is defined as the wear distance rate
ks. Thus, the wear distance rate is given by [
30]:
3. Numerical Algorithm
The analysis of mechanical face seals under random vibration loading based on the proposed model is performed according to the flowchart described in
Figure 3.
The input data includes the geometric parameters of mechanical face seal and random vibration loading. In the proposed mathematical model, the calculation process begins with the initial design parameters C, K, and m of the mechanical face seal. It then proceeds with random vibration response analysis, mainly calculating the random vibration response spectrum and RMS. The next step is mass-spring-damping model analysis, which aims at calculating the equivalent force caused by random vibration loading. Force analysis is then conducted, mainly calculating the hydrodynamic force and asperity contact force. Random vibration response analysis, mass-spring-damping model analysis, and force analysis are iterated until the film thickness achieves convergence. This process is followed by lubrication regime analysis, with the main purpose to analyze the relationship between duty parameter G and random vibration loading. Finally, wear analysis is carried out, mainly calculating the total normal load and solving the Archard wear equation. In this paper, surface roughness is considered to be a constant, the purpose is to get the asperity contact load Fc. The clearance between the stator and rotor determines the asperity contact load Fc. Similarly, according to the Reynolds equation, this clearance also determines the fluid pressure Ff. The change of stator surface height reflects the change of surface profiles. When the initial design parameters of the mechanical face seal cannot meet the operation requirements, new design parameters are re-introduced into the calculation process.
4. Numerical Experiments and Discussion
4.1. Random Vibration Loading
Random vibration loads can be conveniently described by PSD functions. According to the measured data in engineering, the most important part is the flat spectrum with a frequency from
f1 to
f2. In this work,
f1 was 80 Hz and
f2 was 350 Hz. The amplitude of input acceleration PSDs for simulation were 4.0, 5.0, 6.0, and 8.0 (m/s
2)
2/Hz, respectively, which represents the PSD value range of a mechanical seal in operation, as shown in
Figure 4.
4.2. Random Vibration Response Spectrum
The random vibration response spectra are all based on the response of the mass-spring-damping model exited to random accelerations. The probability that the response will exceed a critical level is of great significance. If the response levels exceed the allowable value, then severe wear will occur. As illustrated in
Figure 5, with the increase of input acceleration PSDs, the random vibration response spectrum curves increase. The main parameter values in this section are set as shown in
Table 2.
Under the same input acceleration PSD, the value is 4.0 (m/s
2)
2/Hz, and for different axial damping values, the random vibration response curve is shown in
Figure 6a. When axial damping increases from 3.00 N∙s/m to 8.00 N∙s/m, the random vibration response curve has a downward trend, shown as a log-log coordinate system in the figure. It can thus be concluded that random vibration can be suppressed by increasing the damping.
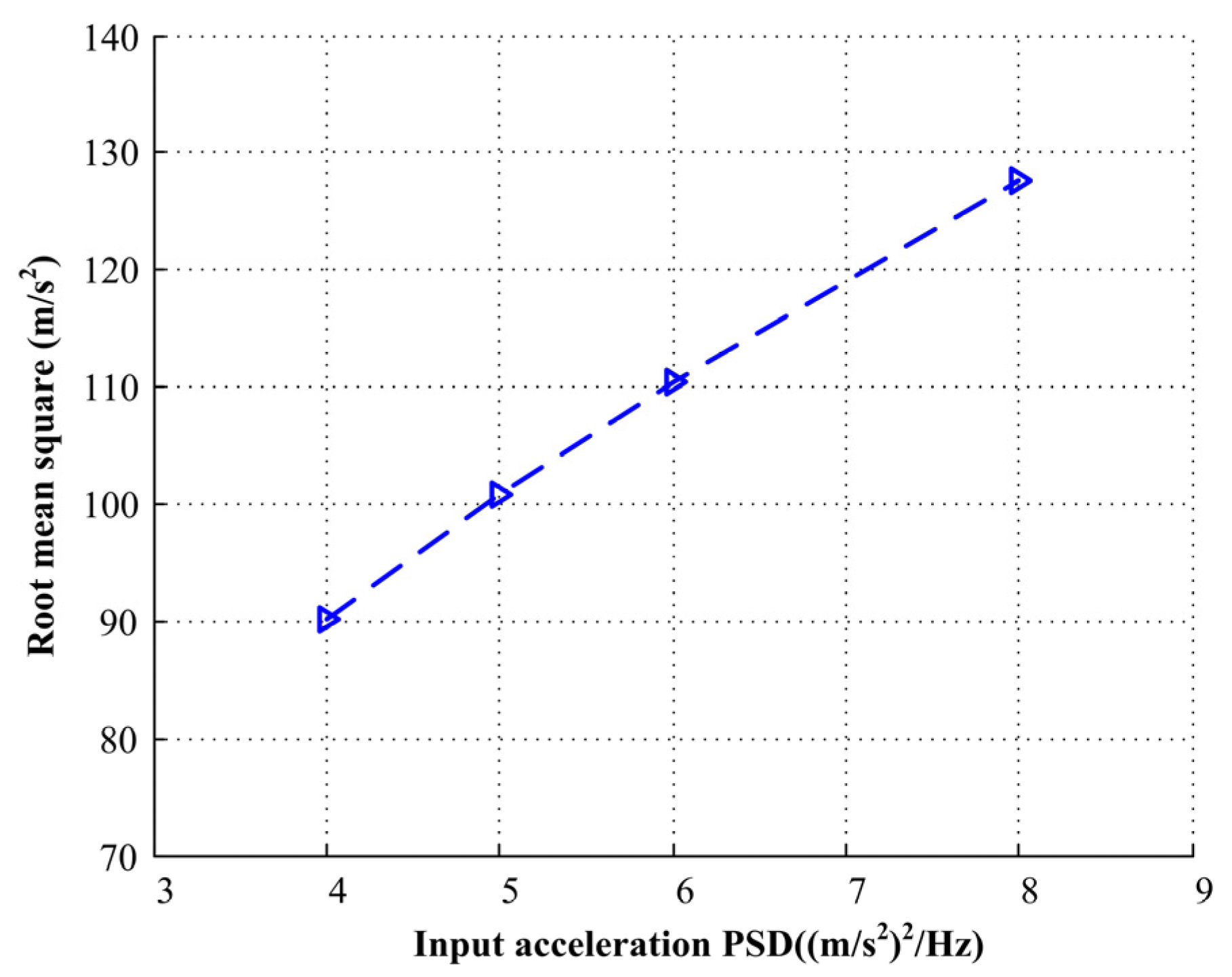
4.3. Root Mean Square Acceleration Response
Random vibration response spectrum analysis determines the RMS response of the stator to an acceleration base input. In this work, random vibration responses were simulated effectively using Equation (18). The total RMS value is equal to the square root of the area bounded by the PSD function between the initiation frequency
f1 and termination frequency
f2.
Figure 7 shows the RMS value
of the acceleration response when the input PSDs are 4.0, 5.0, 6.0, and 8.0 (m/s
2)
2/Hz, respectively. According to
Figure 7, it can be seen that the RMS value increases with the increase of input acceleration PSDs.
According to Equation (20), the corresponding equivalent force Fv caused by random vibration loading can then be calculated.
4.4. Force Analysis and Lubrication Regime Analysis
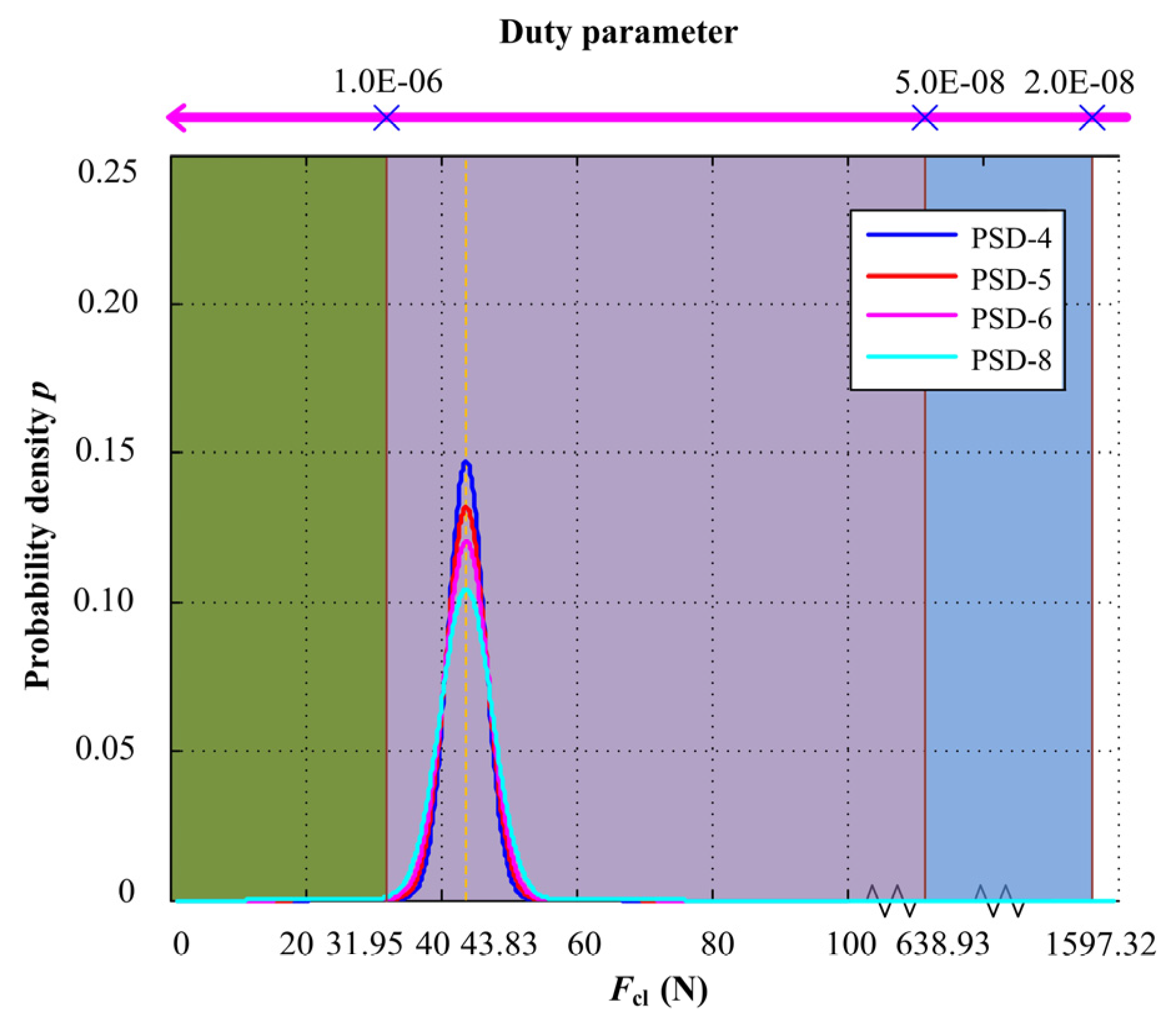
In the initial equilibrium state, the mechanical face seal works under mixed lubrication regime and the closing force Fcl is equal to the opening force Fo, according to the design parameters of mechanical seal. The balance radius rb is equal to 10.0 × 10−3 m, and the initial preload of the seal spring Fs is 25.0 N, so the closing force is 43.83 N.
The initial angular velocity is 200 rad/s, the dynamic viscosity is 8.7 × 10
−3 Pa∙s, on the basis of the relationship between the lubrication regime of mechanical seals and the duty parameter
G listed in
Table 1. When
Fcl is less than 31.95 N, the mechanical face seal works under full film lubrication regime and when
Fcl is greater than 31.95 N and less than 638.93 N, it works under the mixed lubrication regime. When
Fcl is greater than 638.93 N and less than 1597.32 N, it is under boundary lubrication regime. According to Equation (21),
G is equal to 7.29 × 10
−7, so the mechanical seal is operating under mixed lubrication regime.
When the input acceleration PSDs are 4.0, 5.0, 6.0, and 8.0 (m/s
2)
2/Hz, respectively, the probability density of closing force
Fcl under different input acceleration PSDs and the relationship with duty parameter
G is shown in
Figure 8. The green area represents full film lubrication regime, the purple area represents mixed lubrication regime, and the blue area represents boundary lubrication regime. When the input acceleration PSDs are small, the mechanical face seal mainly works under mixed lubrication regime, and with the increase of input PSDs, the probability of the mechanical face seal working under full film lubrication regime increases, with the probability value shown in
Figure 9. Because of the balance radius
rb and the initial preload of seal spring
Fs, the mechanical seal will not work under boundary lubrication regime.
When axial damping increases from 3.00 N∙s/m to 8.00 N∙s/m, the input acceleration PSD is 4.0 (m/s
2)
2/Hz, with the probability density of closing force
Fcl under different axial damping and the relationship with duty parameter
G shown in
Figure 10. The green area represents full film lubrication regime, the purple area represents mixed lubrication regime, and the blue area represents boundary lubrication regime. When the axial damping is large, the mechanical face seal mainly works under mixed lubrication regime, and with the decrease of axial damping, the probability of the mechanical face seal operating under full film lubrication regime increases, with the probability value shown in
Figure 11.
Similarly, when the input acceleration PSD is 4.0 (m/s
2)
2/Hz, for different axial stiffness values, the axial stiffness increases from 40000 to 50000 N/m. The probability density of closing force
Fcl under different axial stiffness and the relationship with duty parameter
G is shown in
Figure 12. When the axial stiffness is small, the mechanical face seal mainly works under mixed lubrication regime, and with the increase of axial stiffness, the probability of the mechanical face seal operating under full film lubrication regime increases, but not obviously, and the probability value is shown in
Figure 13.
4.5. Wear Analysis
According to Equations (24,25), it can be observed that the wear distance rate is directly related to the normal force FW, and its value is also equal to the asperity contact load Fc. Here, wear modulus kw was set as 0.35 × 10−6 mm3/N∙m, which is obtained from wear testing. It was also assumed that the shaft is rotating at constant speed, which is 200 rad/s. The 3-sigma approach was then applied to analyze the equivalent force caused by random vibration loading.
The relationship between the input acceleration PSDs and wear distance rate is shown in
Figure 14. The wear distance rate decreases when the input acceleration PSDs improve. The wear distance rate decreases from 0.56 × 10
−4 to 0.46 × 10
−4 um/m with increase of the input acceleration PSDs from 4.0 to 8.0 (m/s
2)
2/Hz. With the increase of input PSDs, the probability of mechanical face seal under full film lubrication regime increases. Therefore, in practical application, the magnitude of input acceleration PSDs must be considered.
The effect of mechanical face seal axial damping on wear distance rate is illustrated in
Figure 15. The wear distance rate increases when the axial damping increases. The wear distance rate increases from 0.49 × 10
-4 to 0.61 × 10
-4 um/m with an increase of the axial damping from 3.0 to 8.0 N∙s/m. With the increase of axial damping, the probability of the mechanical face seal under full film lubrication regime decreases. Therefore, decreasing axial damping can restrain random vibration and reduce wear.
The effect of axial stiffness on wear distance rate is illustrated in
Figure 16. The wear distance rate decreases when the axial stiffness increases. The wear distance rate decreases from 0.567 × 10
−4 to 0.538 × 10
−4 um/m with an increase in the axial stiffness from 40000 to 50000 N/m. With higher axial stiffness, the probability of the mechanical face seal working under full film lubrication regime increases, but the effect is not significant. As a result of
, when axial stiffness changes from 40000 to 50000 N/m, for a determined mass
m, the natural frequency range is from 183.8 to 205.5 Hz. In practical application, the frequency of this interval should be avoided to prevent resonance.
5. Conclusions
In this paper, mechanical face seals for hydraulic pumps used in air and space vehicles were studied. The effects of random vibration loading on seal lubrication regime and seal wear were focused. The mechanical face seal in the axial direction was abstracted as a mass-spring-damping system. The effects of input acceleration PSDs and dynamic parameters such as axial stiffness and axial damping on wear of the mechanical face seal were also taken into consideration. The model proposed in this paper can be used to analyze the lubrication regime of the mechanical face seal. Its purpose is to determine optimal mechanical specifications, reduce wear, and improve service life.
A simulation study was performed, and the results indicate that when the input acceleration PSDs are small, the mechanical face seal mainly works under mixed lubrication regime. With the increase of input acceleration PSDs, the probability of the mechanical face seal working under full film lubrication regime increases. The results also indicate that with the decrease of axial damping or the increase of axial stiffness, the probability of the mechanical face seal operating under full film lubrication regime increases.
The effects of the input acceleration PSDs, axial stiffness, and axial damping on wear were also studied. Numerical simulations demonstrated that increase in input acceleration PSDs results in an decreased wear distance rate. Similarly, an increase in axial damping or decrease in axial stiffness results in the increase of wear distance rate and the effect of axial damping is more significant.
The presented work provides a foundation for engineers to design mechanical face seals under random vibration loading. This research is carried out from the macroscopic perspective, and micromechanical aspects, such as the interaction of lubricant and asperities under random vibration loading can be further studied separately. Future work informed by the model presented in this article will include a comprehensive study of frictional heating, thermal deformation, the squeeze term in Reynolds equation, and viscosity variations in the film, aiming to reduce wear and improve the service life of mechanical face seals.
Author Contributions
The manuscript was written with the contribution of all authors. W.H. conceived the idea and carried out the simulation, X.W. proposed the method, D.L. and C.Z. analyzed the data and wrote the original draft, S.W. reviewed and edited the manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This study was co-supported by Natural Science Foundation of China: 51620105010, 51575019, Natural Science Foundation of Beijing Municipality: L171003 and Program 111 of China.
Acknowledgments
Thanks are due to Liang B. for valuable discussion.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Now taking the Fourier transform of each side
Note that the approach used here is rigorous. Let
Recall (A2), by substitution,
The relative acceleration equation can be expressed in terms of Fourier transforms as:
Multiply each side by its complex conjugate,
The Fourier transforms are converted into power spectral densities,
Equation (A16) can be transformed as a function of frequency
f as follows:
References
- Zhang, J.F.; Yuan, S.Q.; Fu, Y.H.; Fang, Y.J. A numerical simulation of 3-d inner flow in upstream pumping mechanical seal. J. Hydrodyn. 2006, 18, 572–577. [Google Scholar] [CrossRef]
- Kanda, K.; Sato, H.; Miyakoshi, T.; Kitano, T. Friction control of mechanical seals in a ventricular assist device. Biosurface Biotribology 2015, 1, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Liang, B.; Yang, X.; Wang, Z.; Su, X.; Liao, B.; Ren, Y.; Sun, B. Influence of Randomness in Rubber Materials Parameters on the Reliability of Rubber O-Ring Seal. Materials 2019, 12, 1566. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ye, S.; Zhang, J.; Xu, B.; Zhu, S.; Xiang, J.; Tang, H. Theoretical investigation of the contributions of the excitation forces to the vibration of an axial piston pump. Mech. Syst. Signal Process. 2019, 129, 201–217. [Google Scholar] [CrossRef]
- Liao, B.; Sun, B.; Yan, M.; Ren, Y.; Zhang, W.; Zhou, K. Time-variant reliability analysis for rubber O-ring seal considering both material degradation and random load. Materials 2017, 10, 1211. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.J.; Wei, L.; Feng, X.; Gu, B. Leakage prediction method for contacting mechanical seals with parallel faces. Chin. J. Mech. Eng. 2010, 23, 7–15. [Google Scholar] [CrossRef]
- Lebeck, A.O. Principles and Design of Mechanical Face Seal; John Wiley & Sons: Hoboken, NJ, USA, 1991. [Google Scholar]
- Braccesi, C.; Valigi, M.C. Undesired acoustic emissions of mechanical face seals: Model and simulations. Tribol. Int. 2013, 71, 125–131. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1966, 295, 300–319. [Google Scholar]
- Pullen, J.; Williamson, J.B.P. On the Plastic Contact of Rough Surfaces. Proc. R. Soc. Lond. A Math. Phys. Sci. 1972, 327, 159–173. [Google Scholar]
- Dayan, J.; Zou, M.; Green, I. Sensitivity analysis for the design and operation of non-contacting mechanical face seal. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2000, 214, 1207–1218. [Google Scholar] [CrossRef]
- Zou, M.; Dayan, J.; Green, I. Dynamic simulation and monitoring of non-contacting flexibly mounted rotor mechanical face seal. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2000, 214, 1195–1206. [Google Scholar] [CrossRef]
- Pustan, M.; Belcin, O.; Birleanu, C. Mechanical seals with oscillating stator. Meccanica 2013, 48, 1191–1200. [Google Scholar] [CrossRef]
- Minet, C.; Brunetiere, N.; Tournerie, B.; Fribourg, D. Analysis and modeling of the topography of mechanical seal faces. Tribol. Trans. 2010, 53, 799–815. [Google Scholar] [CrossRef]
- Leishear, R.A.; Stekanko, D.B. Relationship between vibrations and mechanical seal life in centrifugal pumps. In Proceedings of the STLE/ASME Int. Joint Tribology Conference, San Diego, CA, USA, 22–24 October 2007; pp. 429–431. [Google Scholar]
- Fang, Y.N.; Liang, X.H.; Zuo, M.J. Effects of friction and stochastic load on transient characteristics of a spur gear pair. Nonlinear Dyn. 2018, 93, 599–609. [Google Scholar] [CrossRef]
- Jin, X.L.; Wang, Y.; Huang, Z.L. Approximately analytical technique for random response of LuGre friction system. Int. J. Non Linear Mech. 2018, 104, 1–7. [Google Scholar] [CrossRef]
- Wang, Y.; Luan, X.L.; Jin, X.L.; Huang, Z.L. Random response evaluation of mono-stable and bi-stable Duffing systems with Dahl friction. Arch. Appl. Mech. 2016, 86, 1827–1840. [Google Scholar] [CrossRef]
- Jin, X.L.; Xu, H.; Wang, Y.; Huang, Z.L. Approximately analytical procedure to evaluate random stick–slip vibration of Duffing system including dry friction. J. Sound Vib. 2019, 443, 520–536. [Google Scholar] [CrossRef]
- Ahmadi, G. Stochastic earthquake response of structures on sliding foundation. Int. J. Eng. Sci. 1983, 21, 93–102. [Google Scholar] [CrossRef]
- Zhu, W.Q.; Soong, T.T.; Lei, Y. Equivalent nonlinear system method for stochastically excited Hamiltonian systems. J. Appl. Mech. 1984, 61, 618–623. [Google Scholar] [CrossRef]
- Varney, P.; Green, I. Impact phenomena in a noncontacting mechanical face seal. J. Tribol. 2016, 139, 022201. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.C.; Yu, X.; Hu, Y.L.; Zang, H.J.; Shu, W. Active control of hydraulic oil contamination to extend the service life of aviation hydraulic system. Int. J. Adv. Manuf. Technol. 2018, 96, 1693–1704. [Google Scholar] [CrossRef]
- Nyemeck, A.P.; Brunetiere, N.; Tournerie, B. A Mixed Thermoelastohydrodynamic Lubrication Analysis of Mechanical Face Seals by a Multiscale Approach. Tribol. Trans. 2015, 58, 836–848. [Google Scholar] [CrossRef]
- Patir, N.; Cheng, H.S. An Average Flow Model for Determining Effects of Three-Dimensional Roughness on Partial Hydrodynamic Lubrication. J. Lubr. Technol. 1978, 100, 12–17. [Google Scholar] [CrossRef]
- Valigi, M.C.; Braccesi, C.; Logozzo, S. A parametric study on friction instabilities in mechanical face seals. Tribol. Trans. 2016, 59, 911–922. [Google Scholar] [CrossRef]
- MIL-STD-810G, Environmental Engineering Considerations & Laboratory Tests; US Military Specs/Standards/Handbooks: Sydney, Australia, 2008.
- Gu, Y.Y. Friction Coefficient and Duty Parameter of Mechanical Face Seals. J. Univ. Pet. 1991, 15, 71–83. [Google Scholar]
- Chen, G.H. Relation between Liquid Hydrodynamic Effect and the Seal Duty Parameter. Chem. Mach. 1979, 6, 1–8. [Google Scholar]
- Liu, D.; Wang, S.P.; Zhang, C. A multiscale wear simulation method for rotary lip seal under mixed lubricating conditions. Tribol. Int. 2018, 121, 190–203. [Google Scholar] [CrossRef]
Figure 1.
(a) Schematic of mechanical face seal; (b) sealing dam between the rotor and the stator; (c) schematic of asperity contact; (d) seal rings.
Figure 1.
(a) Schematic of mechanical face seal; (b) sealing dam between the rotor and the stator; (c) schematic of asperity contact; (d) seal rings.
Figure 2.
(a) Mass-spring-damping model; (b) acceleration power spectral density (PSD).
Figure 2.
(a) Mass-spring-damping model; (b) acceleration power spectral density (PSD).
Figure 3.
Flowchart of the proposed simulation method.
Figure 3.
Flowchart of the proposed simulation method.
Figure 4.
Flowchart of the proposed simulation method.
Figure 4.
Flowchart of the proposed simulation method.
Figure 5.
Random vibration response spectrum curve under different input acceleration PSDs.
Figure 5.
Random vibration response spectrum curve under different input acceleration PSDs.
Figure 6.
(a) Random vibration response curve under different axial damping; (b) random vibration response curve under different axial stiffness.
Figure 6.
(a) Random vibration response curve under different axial damping; (b) random vibration response curve under different axial stiffness.
Figure 7.
The root mean square (RMS) acceleration response under different input acceleration PSDs.
Figure 7.
The root mean square (RMS) acceleration response under different input acceleration PSDs.
Figure 8.
Probability density of closing force Fcl under different input acceleration PSDs and the relationship with duty parameter G.
Figure 8.
Probability density of closing force Fcl under different input acceleration PSDs and the relationship with duty parameter G.
Figure 9.
Probability value under different input acceleration PSDs.
Figure 9.
Probability value under different input acceleration PSDs.
Figure 10.
Probability density of closing force Fcl under different axial damping and the relationship with duty parameter G.
Figure 10.
Probability density of closing force Fcl under different axial damping and the relationship with duty parameter G.
Figure 11.
Probability value under different axial damping.
Figure 11.
Probability value under different axial damping.
Figure 12.
Probability density of closing force Fcl under different axial stiffness and the relationship with duty parameter G.
Figure 12.
Probability density of closing force Fcl under different axial stiffness and the relationship with duty parameter G.
Figure 13.
Probability value under different axial stiffness.
Figure 13.
Probability value under different axial stiffness.
Figure 14.
Wear distance rate under different input acceleration PSDs.
Figure 14.
Wear distance rate under different input acceleration PSDs.
Figure 15.
Wear distance rate under different axial damping.
Figure 15.
Wear distance rate under different axial damping.
Figure 16.
Wear distance rate under different axial stiffness.
Figure 16.
Wear distance rate under different axial stiffness.
Table 1.
Relationship between lubrication regime and duty parameter G.
Table 1.
Relationship between lubrication regime and duty parameter G.
| Lubrication Regime | Duty Parameter G |
|---|
| Full film lubrication regime | |
| Boundary lubrication regime | |
| Mixed lubrication regime | |
Table 2.
Main parameter values.
Table 2.
Main parameter values.
| Parameter | Meaning | Value |
|---|
| C | Axial damping | 5.00 N∙s/m |
| K | Axial stiffness | 42000 N/m |
| m | Mass | 0.03 kg |
| ri | Inner stator radius | 9.3 × 10−3 m |
| rb | Balance radius | 10.0 × 10−3 m |
| ro | Outer stator radius | 11.1 × 10−3 m |
| f1 | Initiation frequency | 80 Hz |
| f2 | Termination frequency | 350 Hz |
| σe | Surface roughness | 0.152 × 10−6 m |
| μ | Dynamic viscosity | 8.7 × 10−3 Pa∙s |
| ω | Angular velocity in working state | 200 rad/s |
| kw | Wear modulus | 0.35 × 10−6 mm3/N∙m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}