
Imaging of Increasing Damage in Steel Plates Using Lamb Waves and Ultrasound Computed Tomography



Abstract
:1. Introduction
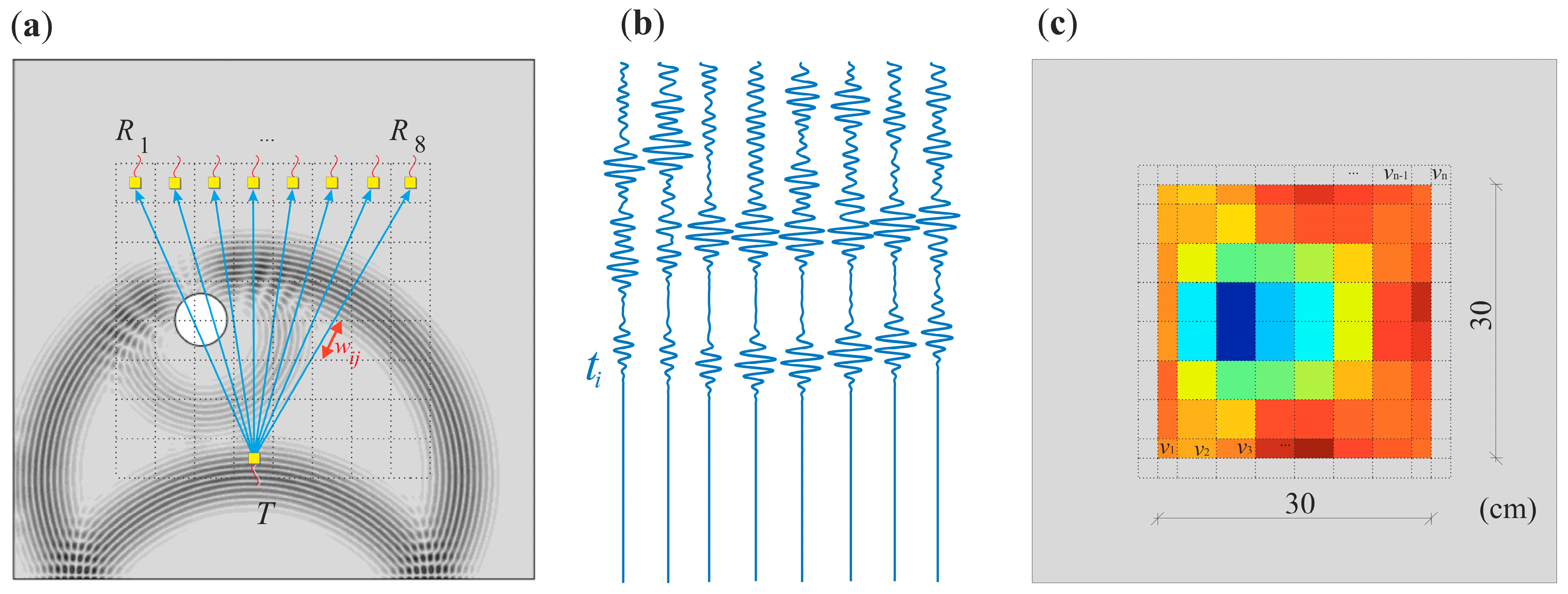
2. Ultrasound Tomography—Theoretical Background
3. Materials and Methods
3.1. Description of Specimens
3.2. Experimental Investigations
3.3. Identification of Material Parameters
3.4. Numerical Modelling
4. Results and Discussion
4.1. Non-Reference Velocity Reconstruction
4.2. Velocity Reconstruction with the Reference to Undamaged Plate
4.3. Influence of the Ray Tracing Technique
- Assign all nodes to group II and give them an infinite cost, except for the start node, whose cost is zero;
- Choose the node from group II with the lowest value. Name it as S (start node) and transfer this node to group I;
- Name as N (neighbour node) each node from group II that is connected to node S;
- Calculate time travel between S and each N node using the equation:
- 5.
- Repeat steps 2–4 until group II is empty.
4.4. Influence of the Pixel Grid Size
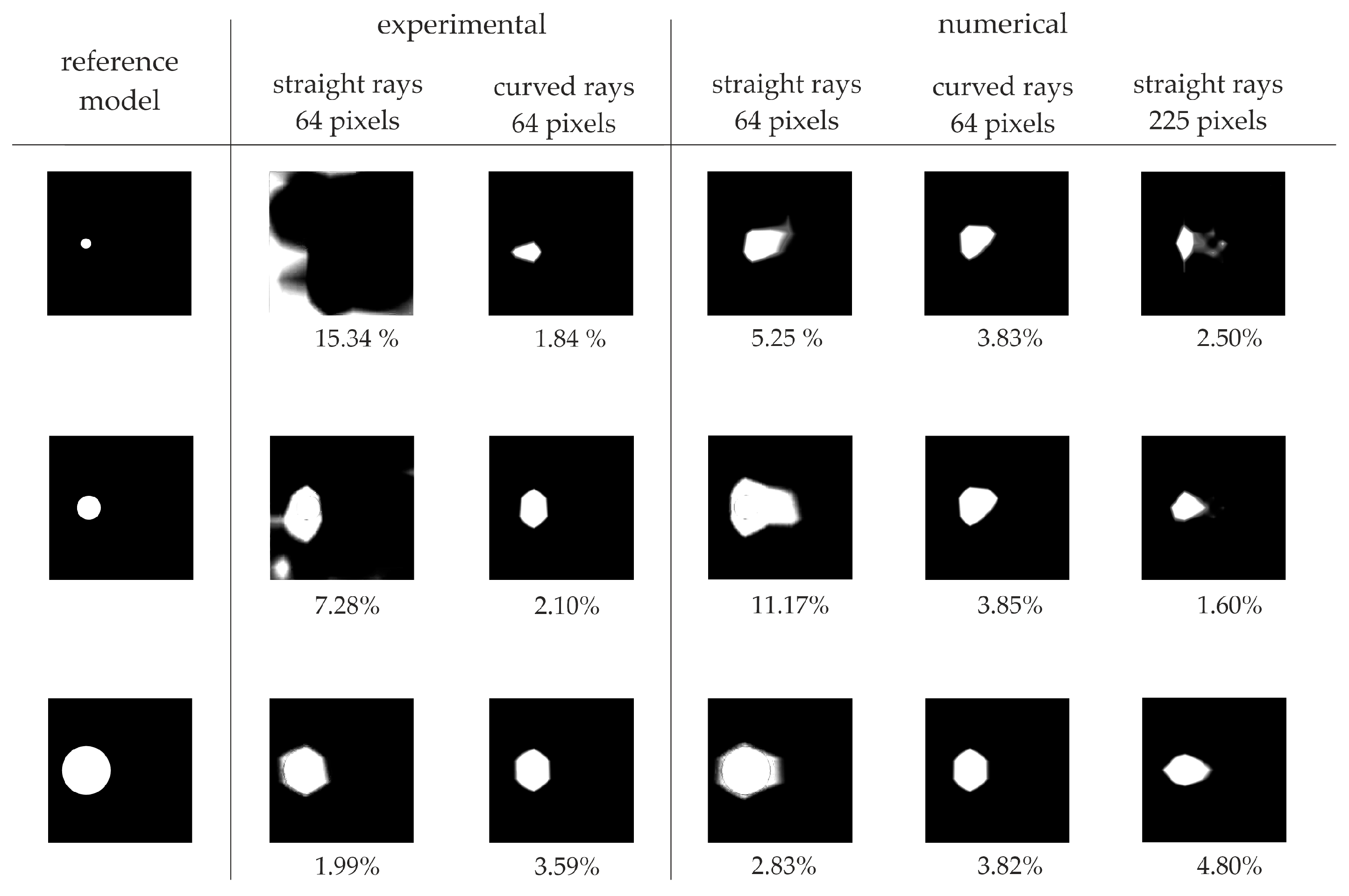
4.5. Quantitative Analysis Using Error Coefficient
5. Conclusions
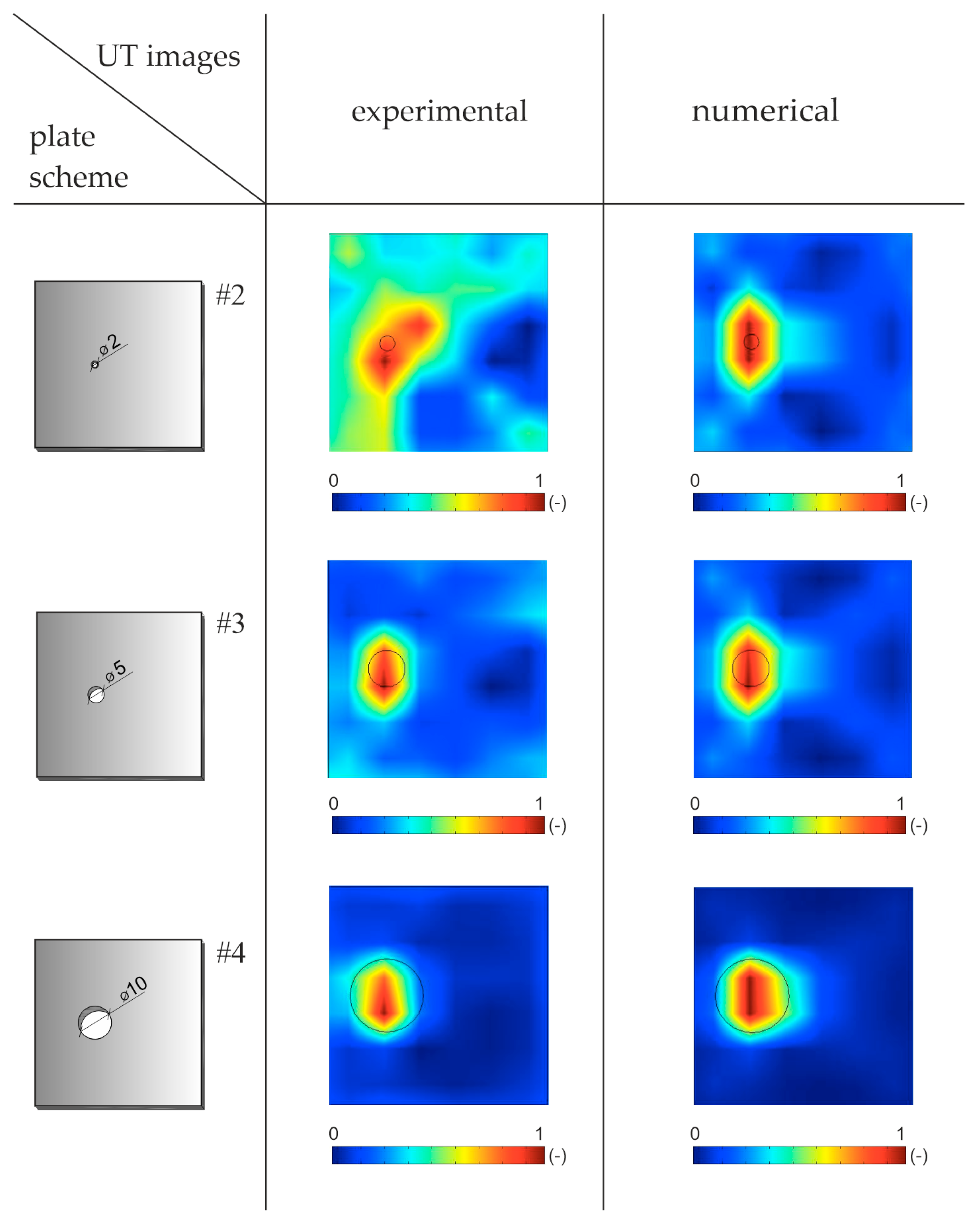
- Surface defects in the form of a circular hole were visualized effectively on tomograms as areas with reduced wave propagation velocity using both the TOF for the current state and the difference of the TOF between the current and reference state;
- The method comparing the TOF of ultrasonic waves propagating through a damaged and undamaged plate proved to be more effective, especially in the case of small defects;
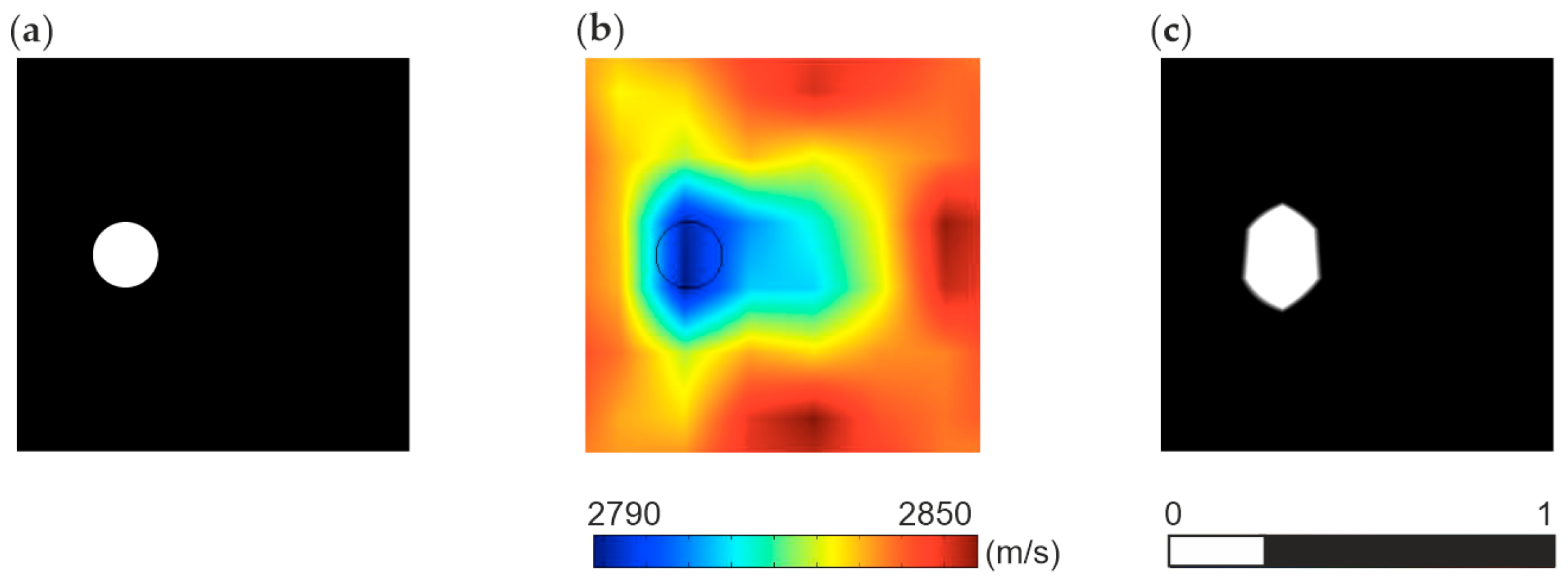
- The apparent velocity of the waves propagating through the tested element decreased with the increase of the damaged area. At the same time, the value of standard deviation and coefficient of variation of wave propagation velocities increased;
- The use of curved wave paths improved the quality of the created ultrasonic tomography maps. However, at the same time, this approach did not allow assessing the damage size, which depends on image resolution, i.e., the number of pixels into which the examined area is divided;
- The course of curved paths was varied. In the case of discontinuities in the material, rays bypassed the place of the defect. However, when comparing the results of the damaged element with undamaged material, defects were detected as places of ray concentration;
- The possibility of assessing the damage size was related to the number of pixels into which the tested model is divided. The densification of the pixel grid made it possible to estimate the damage size more efficiently;
- The quantitative evaluation of the applied methods of densification of the pixel grid and the hybrid ray-tracing method was performed using an error coefficient. The coefficient clearly indicated the improvement in determining the size of the damage in the case of small defects with a diameter of 2 and 5 cm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wojtczak, E.; Rucka, M. Wave frequency effects on damage imaging in adhesive joints using lamb waves and RMS. Materials 2019, 12, 1842. [Google Scholar] [CrossRef] [Green Version]
- Wojtczak, E.; Rucka, M.; Knak, M. Detection and Imaging of Debonding in Adhesive Joints of Concrete Beams Strengthened with Steel Plates Using Guided Waves and Weighted Root Mean Square. Materials 2020, 13, 2167. [Google Scholar] [CrossRef] [PubMed]
- Zou, F.; Rao, J.; Aliabadi, M.H. Highly accurate online characterisation of cracks in plate-like structures. NDT E Int. 2018, 94, 1–12. [Google Scholar] [CrossRef]
- Li, D.; Jing, Z.; Jin, M. Plate-like structure damage location identification based on Lamb wave baseline-free probability imaging method. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Fendzi, C.; Mechbal, N.; Rébillat, M.; Guskov, M.; Coffignal, G. A general Bayesian framework for ellipse-based and hyperbola-based damage localization in anisotropic composite plates. J. Intell. Mater. Syst. Struct. 2016, 27, 350–374. [Google Scholar] [CrossRef] [Green Version]
- Miao, X.; Wang, D.; Ye, L.; Lu, Y.; Li, F.; Meng, G. Identification of dual notches based on time-reversal lamb waves and a damage diagnostic imaging algorithm. J. Intell. Mater. Syst. Struct. 2011, 22, 1983–1992. [Google Scholar] [CrossRef]
- Lin, X.; Yuan, F.G. Damage detection of a plate using migration technique. J. Intell. Mater. Syst. Struct. 2001, 12, 469–482. [Google Scholar] [CrossRef]
- Giurgiutiu, V.; Bao, J. Embedded-ultrasonics structural radar for in situ structural health monitoring of thin-wall structures. Struct. Health Monit. 2004, 3, 121–140. [Google Scholar] [CrossRef] [Green Version]
- Słoński, M.; Schabowicz, K.; Krawczyk, E. Detection of Flaws in Concrete Using Ultrasonic Tomography and Convolutional Neural Networks. Materials 2020, 13, 1557. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schabowicz, K. Ultrasonic tomography—The latest nondestructive technique for testing concrete members—Description, test methodology, application example. Arch. Civ. Mech. Eng. 2014, 14, 295–303. [Google Scholar] [CrossRef]
- Perkowski, Z.; Tatara, K. The Use of Dijkstra’s Algorithm in Assessing the Correctness of Imaging Brittle Damage in Concrete Beams by Means of Ultrasonic Transmission Tomography. Materials 2020, 13, 551. [Google Scholar] [CrossRef] [Green Version]
- Jansen, D.P.; Hutchins, D.A. Lamb wave tomography. In Proceedings of the IEEE Symposium on Ultrasonics, Honolulu, HI, USA, 4–7 December 1990. [Google Scholar] [CrossRef]
- Hutchins, D.A.; Jansen, D.P.; Edwards, C. Lamb-wave tomography using non-contact transduction. Ultrasonics 1993, 31, 97–103. [Google Scholar] [CrossRef]
- Nagata, Y.; Huang, J.; Achenbach, D.; Krishnaswamy, S. Lamb wave tomography using laser-based ultrasonic. Rev. Prog. Quant. Nondestruct. Eval. 1995, 14, 561–568. [Google Scholar]
- Jansen, D.; Hutchins, D.; Mottram, J. Lamb wave tomography of advanced composite laminates containing damage. Ultrasonics 1994, 32, 83–90. [Google Scholar] [CrossRef]
- Asokkumar, A.; Jasiūnienė, E.; Raišutis, R.; Kažys, R.J. Comparison of ultrasonic non-contact air-coupled techniques for characterization of impact-type defects in pultruded gfrp composites. Materials 2021, 14, 1058. [Google Scholar] [CrossRef] [PubMed]
- Bin, H.; Ning, H.; Leilei, L.; Weiguo, L.; Shan, T.; Xianghe, P.; Atsushi, H.; Yaolu, L.; Liangke, W.; Huiming, N. Tomographic reconstruction of damage images in hollow cylinders using Lamb waves. Ultrasonics 2014, 54, 2015–2023. [Google Scholar] [CrossRef]
- Hildebrand, B.P.; Davis, T.J.; Posakony, G.J.; Spanner, J.C. Lamb wave tomography for imaging erosion/corrosion in piping. In Review of Progress in Quantitative Nondestructive Evaluation. Review of Progress in Quantitative Nondestructive Evaluation, Vol 18 A; Thompson, D.O., Chimenti, D.E., Eds.; Springer: Boston, MA, USA, 1999; pp. 967–973. [Google Scholar]
- Huthwaite, P.; Ribichini, R.; Cawley, P.; Lowe, M. Mode selection for corrosion detection in pipes and vessels via guided wave tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1165–1177. [Google Scholar] [CrossRef]
- Leonard, K.R.; Hinders, M.K. Lamb wave tomography of pipe-like structures. Ultrasonics 2005, 43, 574–583. [Google Scholar] [CrossRef]
- Amjad, U.; Yadav, S.K.; Kundu, T. Detection and quantification of pipe damage from change in time of flight and phase. Ultrasonics 2015, 62, 223–236. [Google Scholar] [CrossRef]
- Volker, A.; Mast, A.; Bloom, J. Experimental results of guided wave travel time tomography. In Proceedings of the Review of Progress in Quantitative Nondestructive Evaluation, AIP Conference Proceedings, San Diego, CA, USA, 18–23 July 2010; Volume 1211, pp. 2052–2059. [Google Scholar]
- Zhao, X.; Rose, J.L. Ultrasonic guided wave tomography for ice detection. Ultrasonics 2016, 67, 212–219. [Google Scholar] [CrossRef]
- Rao, J.; Ratassepp, M.; Lisevych, D.; Hamzah Caffoor, M.; Fan, Z. On-Line Corrosion Monitoring of Plate Structures Based on Guided Wave Tomography Using Piezoelectric Sensors. Sensors 2017, 17, 2882. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, D.; Zhang, W.; Wang, X.; Sun, B. Lamb-wave-based tomographic imaging techniques for hole-edge corrosion monitoring in plate structures. Materials 2016, 9, 916. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic Lamb wave tomography in structural health monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Leonard, K.R.; Malyarenko, E.V.; Hinders, M.K. Ultrasonic Lamb wave tomography. Inverse Probl. 2002, 18, 1795–1808. [Google Scholar] [CrossRef]
- Khare, S.; Razdan, M.; Jain, N.; Munshi, P.; Sekhar, B.V.S. Lamb wave tomographic reconstruction using various MART algorithms. In Proceedings of the Indian Society for Non-Destructive Testing Hyderabad Chapter Proc. National Seminar on Non-Destructive Evaluation, Hyderabad, India, 7–9 December 2006. [Google Scholar]
- Balvantin, A.; Baltazar, A. Ultrasonic Tomography Using Lamb Wave Propagation Parameters. In Proceedings of the 5th Pan American Conference for NDT, Cancun, Mexico, 2–6 October 2011. [Google Scholar]
- Prasad, S.M.; Balasubramaniam, K.; Krishnamurthy, C.V. Structural health monitoring of composite structures using Lamb wave tomography. Smart Mater. Struct. 2004, 13, N73–N79. [Google Scholar] [CrossRef]
- Menke, W.; Abbott, D. Geophysical Theory; Columbia University Press: New York, NY, USA, 1990. [Google Scholar]
- Červený, V. Seismic Ray Theory; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Belanger, P.; Cawley, P. Feasibility of low-frequency straight-ray guided wave tomography. NDT E Int. 2009, 1096, 153–160. [Google Scholar] [CrossRef]
- Xu, K.; Ta, D.; Su, Z.; Wang, W. Transmission analysis of ultrasonic Lamb mode conversion in a plate with partial-thickness notch. Ultrasonics 2014, 54, 395–401. [Google Scholar] [CrossRef]
- Chen, Q.; Xu, K.; Ta, D. High-resolution Lamb waves dispersion curves estimation and elastic property inversion. Ultrasonics 2021, 115, 106427. [Google Scholar] [CrossRef]
- Liu, Z.; Xu, K.; Li, D.; Ta, D.; Wang, W. Automatic mode extraction of ultrasonic guided waves using synchrosqueezed wavelet transform. Ultrasonics 2019, 99, 105948. [Google Scholar] [CrossRef] [PubMed]
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; The Institiute of Electrical and Electronics Engineers, Inc.: New York, NY, USA, 1988. [Google Scholar]
- Moustafa, A.; Salamone, S. Fractal dimension-based Lamb wave tomography algorithm for damage detection in plate-like structures. J. Intell. Mater. Syst. Struct. 2012, 23, 1269–1276. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, F.; Cao, P.; Liu, Y.; Zhang, J.; Fu, S.; Zhang, J.; Hu, N. Generation mechanism of nonlinear ultrasonic Lamb waves in thin plates with randomly distributed micro-cracks. Ultrasonics 2017, 79, 60–67. [Google Scholar] [CrossRef] [Green Version]
- Schuller, M.P.; Atkinson, R.H. Evaluation of concrete using acoustic tomography. Rev. Prog. Quant. Nondestruct. Eval. 1995, 14, 2215–2222. [Google Scholar]
- Martin, J.; Broughton, K.J.; Giannopolous, A.; Hardy, M.S.A.; Forde, M.C. Ultrasonic tomography of grouted duct post-tensioned reinforced concrete bridge beams. NDT E Int. 2001, 34, 107–113. [Google Scholar] [CrossRef]
- Shiotani, T.; Momoki, S.; Chai, H.; Aggelis, D.G. Elastic wave validation of large concrete structures repaired by means of cement grouting. Constr. Build. Mater. 2009, 23, 2647–2652. [Google Scholar] [CrossRef] [Green Version]
- Aggelis, D.G.; Tsimpris, N.; Chai, H.K.; Shiotani, T.; Kobayashi, Y. Numerical simulation of elastic waves for visualization of defects. Constr. Build. Mater. 2011, 25, 1503–1512. [Google Scholar] [CrossRef]
- Choi, H.; Popovics, J.S. NDE application of ultrasonic tomography to a full-scale concrete structure. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2015, 62, 1076–1085. [Google Scholar] [CrossRef] [PubMed]
- Choi, H.; Ham, Y.; Popovics, J.S. Integrated visualization for reinforced concrete using ultrasonic tomography and image-based 3-D reconstruction. Constr. Build. Mater. 2016, 123, 384–393. [Google Scholar] [CrossRef] [Green Version]
- Chai, H.K.; Liu, K.F.; Behnia, A.; Yoshikazu, K.; Shiotani, T. Development of a tomography technique for assessment of the material condition of concrete using optimized elastic wave parameters. Materials 2016, 9, 291. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Haach, V.G.; Ramirez, F.C. Qualitative assessment of concrete by ultrasound tomography. Constr. Build. Mater. 2016, 119, 61–70. [Google Scholar] [CrossRef]
- Lluveras Núñez, D.; Molero-Armenta, M.Á.; Izquierdo, M.Á.G.; Hernández, M.G.; Velayos, J.J.A. Ultrasound transmission tomography for detecting and measuring cylindrical objects embedded in concrete. Sensors 2017, 17, 1085. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.; Tang, S.; Dai, X.; Fang, Z. Investigation into the Effectiveness of Ultrasonic Tomography for Grouting Quality Evaluation. KSCE J. Civ. Eng. 2018, 22, 5094–5101. [Google Scholar] [CrossRef]
- Zielińska, M.; Rucka, M. Non-Destructive Assessment of Masonry Pillars using Ultrasonic Tomography. Materials 2018, 11, 2543. [Google Scholar] [CrossRef] [Green Version]
- Zielińska, M.; Rucka, M. Detection of debonding in reinforced concrete beams using ultrasonic transmission tomography and hybrid ray tracing technique. Constr. Build. Mater. 2020, 262, 120104. [Google Scholar] [CrossRef]
- Nowers, O.; Duxbury, D.J.; Zhang, J.; Drinkwater, B.W. Novel ray-tracing algorithms in NDE: Application of Dijkstra and A* algorithms to the inspection of an anisotropic weld. NDT E Int. 2014, 61, 58–66. [Google Scholar] [CrossRef]
- Perlin, L.P.; Pinto, R.C.; de, A. Use of network theory to improve the ultrasonic tomography in concrete. Ultrasonics 2019, 96, 185–195. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plate | vmin (m/s) | vmax (m/s) | Δv = vmax − vmin (m/s) | vavg (m/s) | SD (m/s) | CV (%) |
|---|---|---|---|---|---|---|
| #1 | 2789.50 | 2872.62 | 83.11 | 2835.33 | 22.75 | 0.80 |
| #2 | 2764.14 | 2872.62 | 108.47 | 2807.85 | 25.27 | 0.90 |
| #3 | 2746.01 | 2872.62 | 126.61 | 2821.63 | 27.47 | 0.97 |
| #4 | 2555.47 | 2860.07 | 304.60 | 2791.01 | 53.29 | 1.91 |
| Plate | vmin (m/s) | vmax (m/s) | Δv = vmax − vmin (m/s) | vavg (m/s) | SD (m/s) | CV (%) |
|---|---|---|---|---|---|---|
| #1 | 2703.95 | 2807.84 | 103.89 | 2756.65 | 29.22 | 1.06 |
| #2 | 2703.95 | 2807.84 | 103.89 | 2756.22 | 29.35 | 1.06 |
| #3 | 2692.14 | 2844.99 | 152.85 | 2752.52 | 32.53 | 1.18 |
| #4 | 2559.39 | 2891.45 | 332.06 | 2743.33 | 51.36 | 1.87 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zielińska, M.; Rucka, M. Imaging of Increasing Damage in Steel Plates Using Lamb Waves and Ultrasound Computed Tomography. Materials 2021, 14, 5114. https://doi.org/10.3390/ma14175114
Zielińska M, Rucka M. Imaging of Increasing Damage in Steel Plates Using Lamb Waves and Ultrasound Computed Tomography. Materials. 2021; 14(17):5114. https://doi.org/10.3390/ma14175114
Chicago/Turabian StyleZielińska, Monika, and Magdalena Rucka. 2021. "Imaging of Increasing Damage in Steel Plates Using Lamb Waves and Ultrasound Computed Tomography" Materials 14, no. 17: 5114. https://doi.org/10.3390/ma14175114
APA StyleZielińska, M., & Rucka, M. (2021). Imaging of Increasing Damage in Steel Plates Using Lamb Waves and Ultrasound Computed Tomography. Materials, 14(17), 5114. https://doi.org/10.3390/ma14175114