
Dynamic NVH Numerical Analysis of Power Steering in the Presence of Lubricant in the System




Abstract
:1. Introduction
1.1. Evolution of Car Comfort Expectations
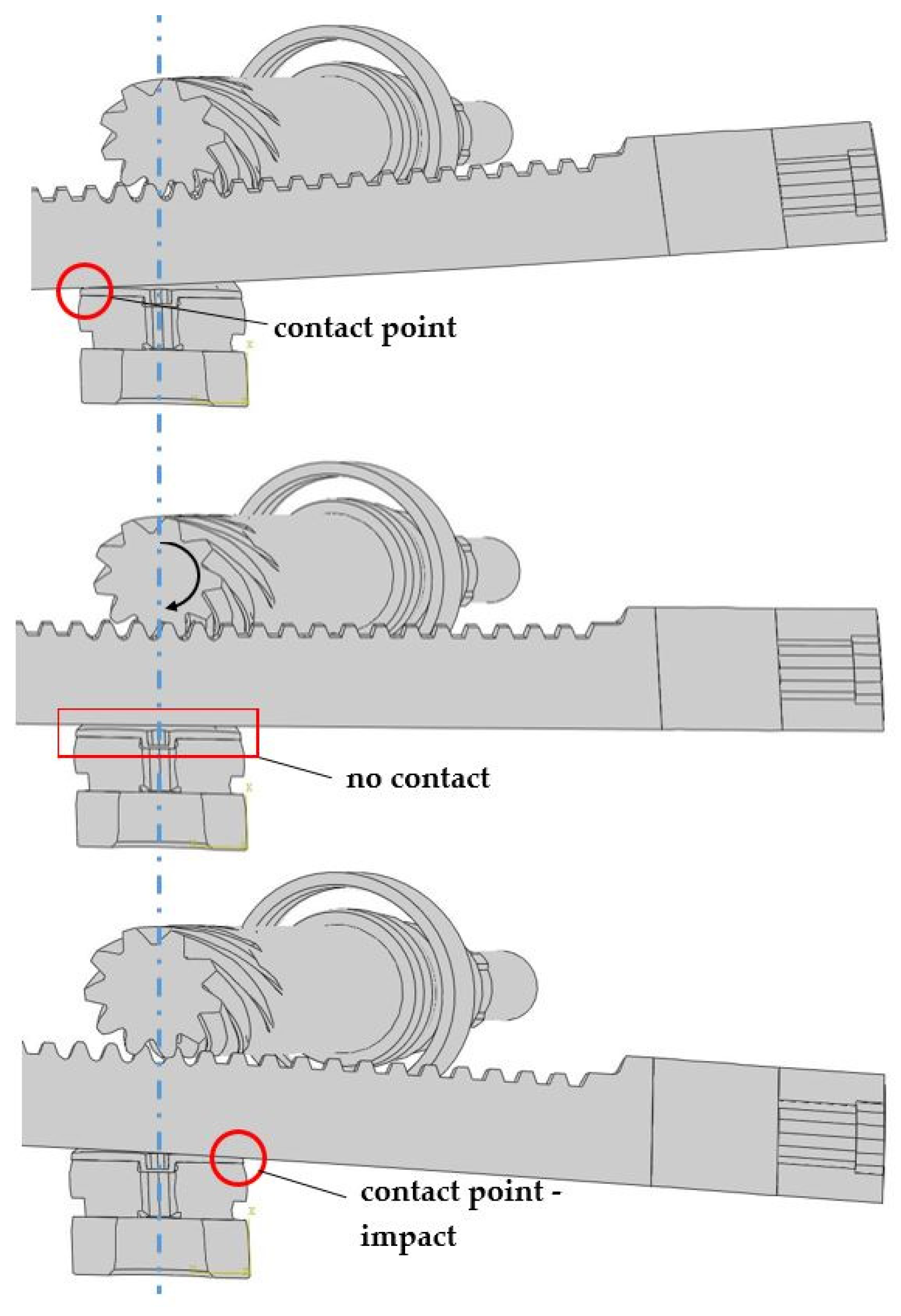
1.2. Significance of Contact Analysis
2. Materials and Methods
2.1. Preliminary Testing
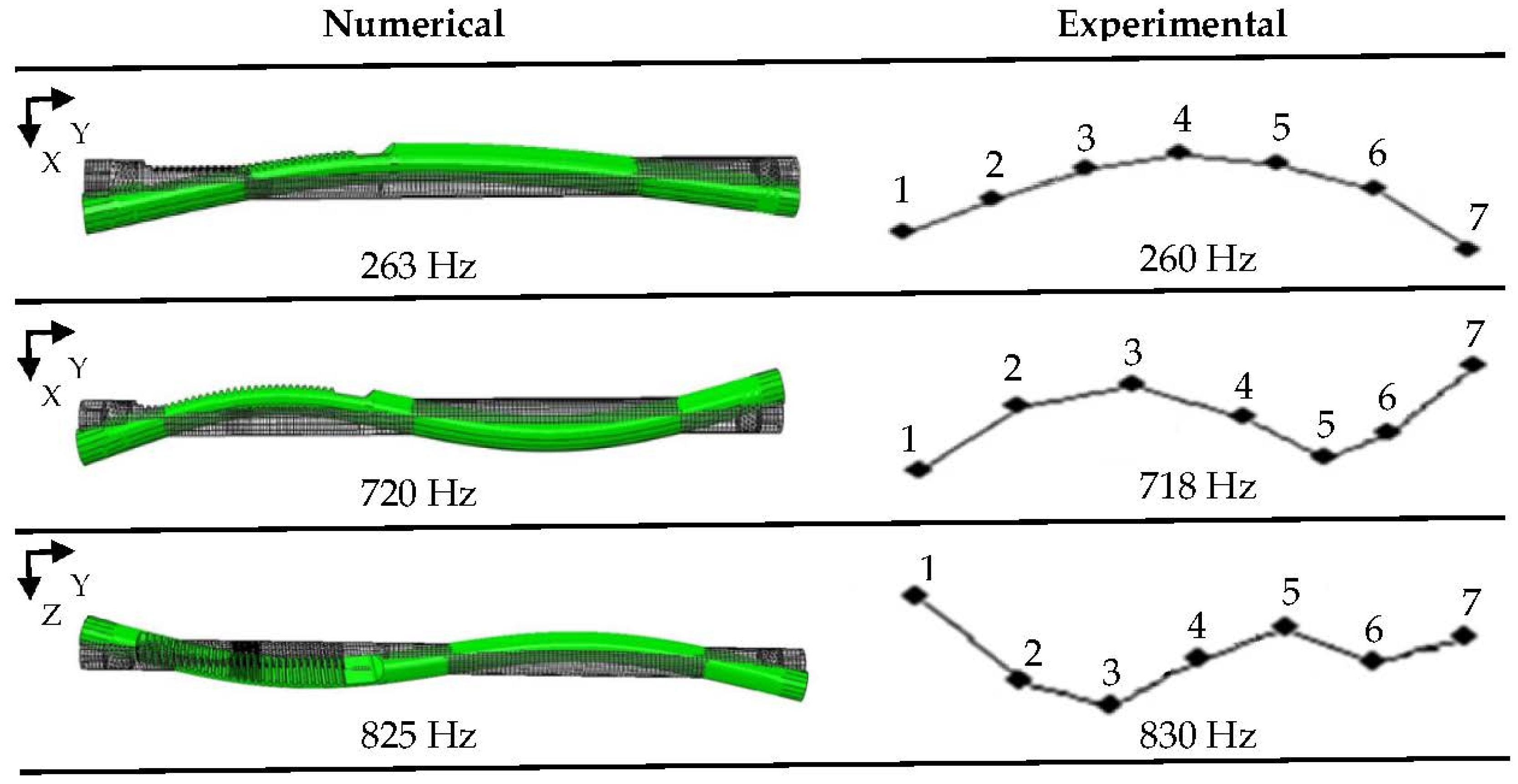
Numerical and Experimental Modal Analysis
2.2. EPS Assembly NVH Performance Investigations
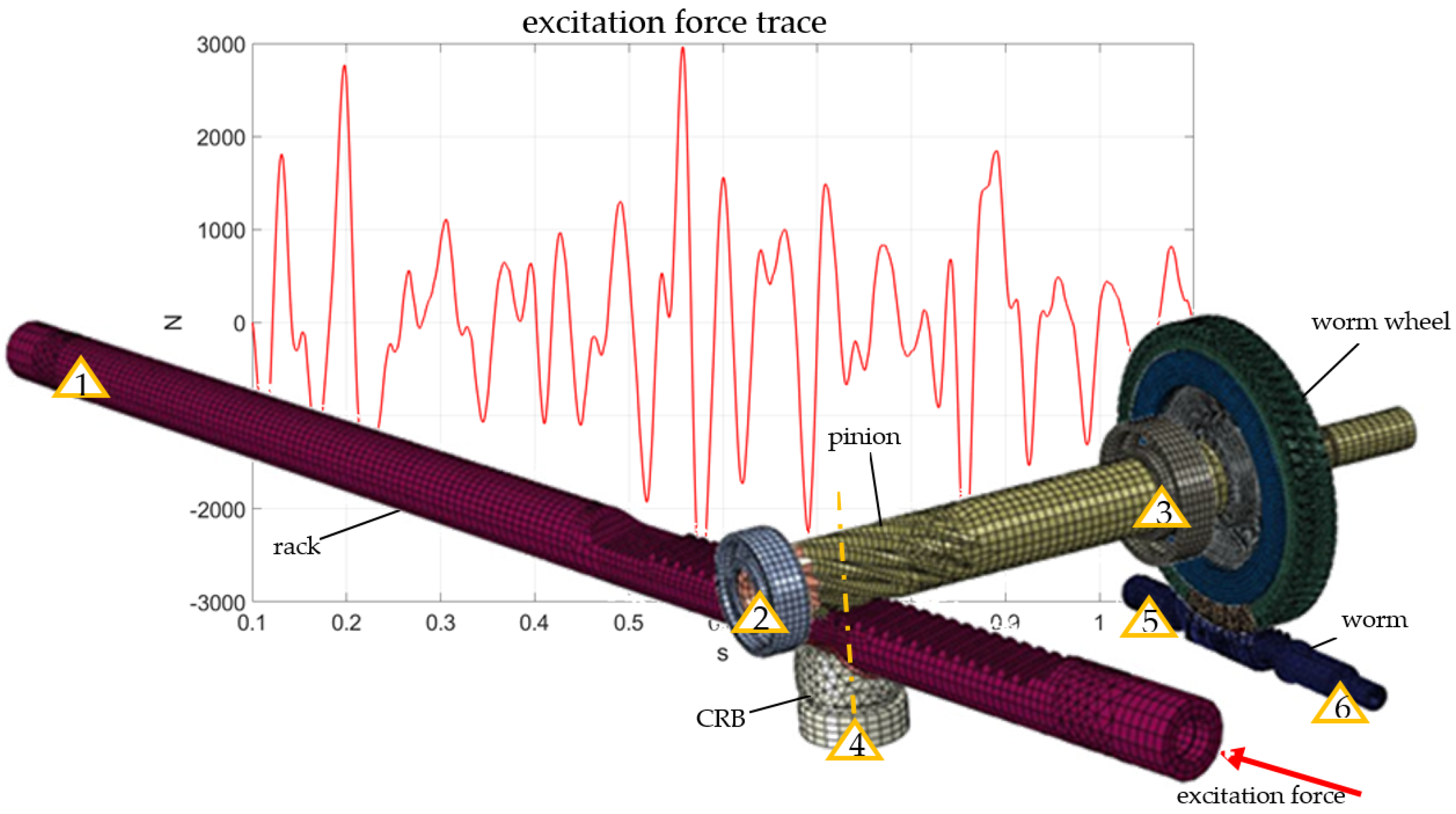
2.2.1. Numerical Simulations
- bushing support (bushing connector)
- bearing support
- bearing support
- spring preload (axial movement only)
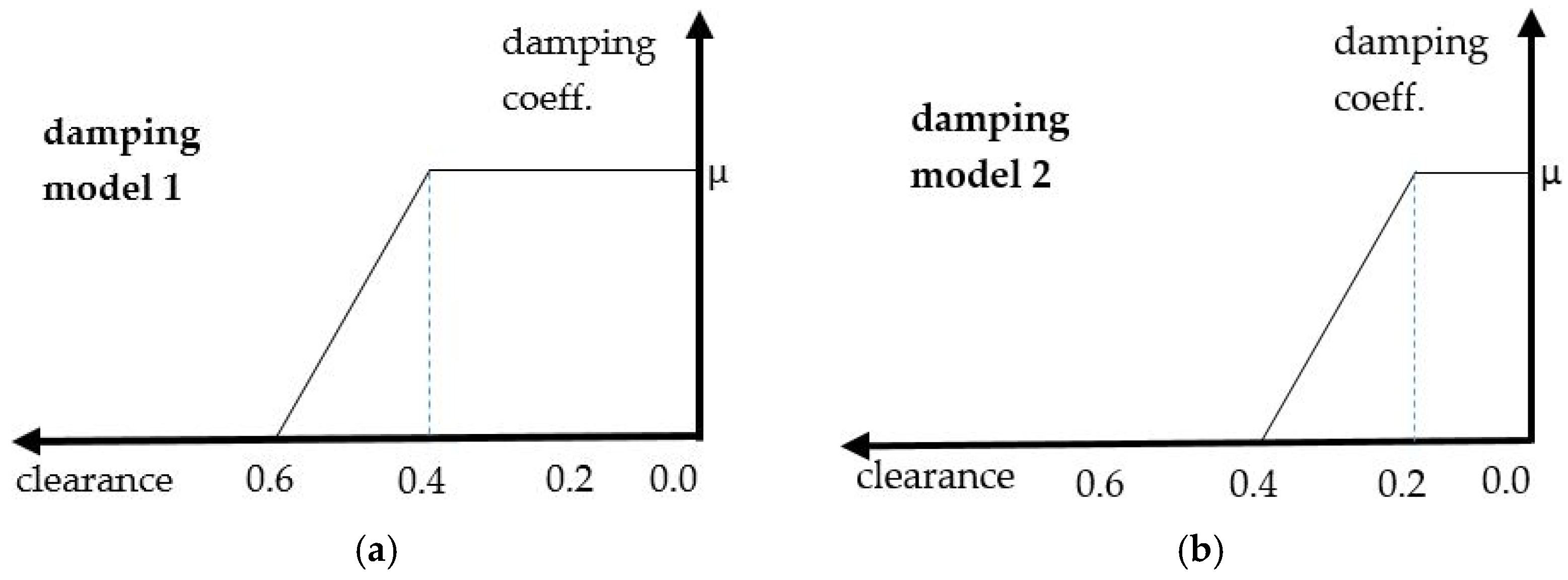
- worm support (worm damper)
- worm support (worm damper, power pack special element)
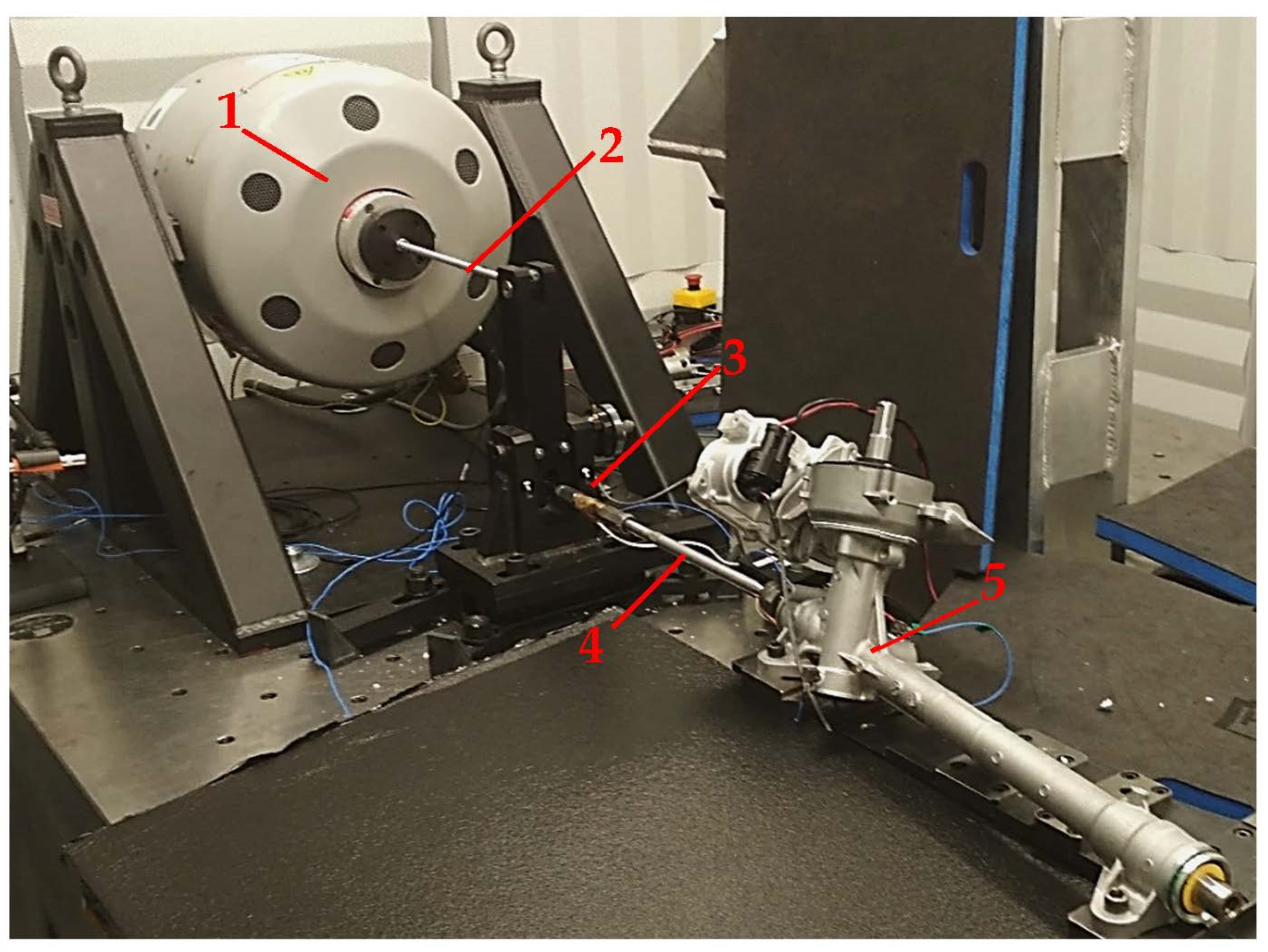
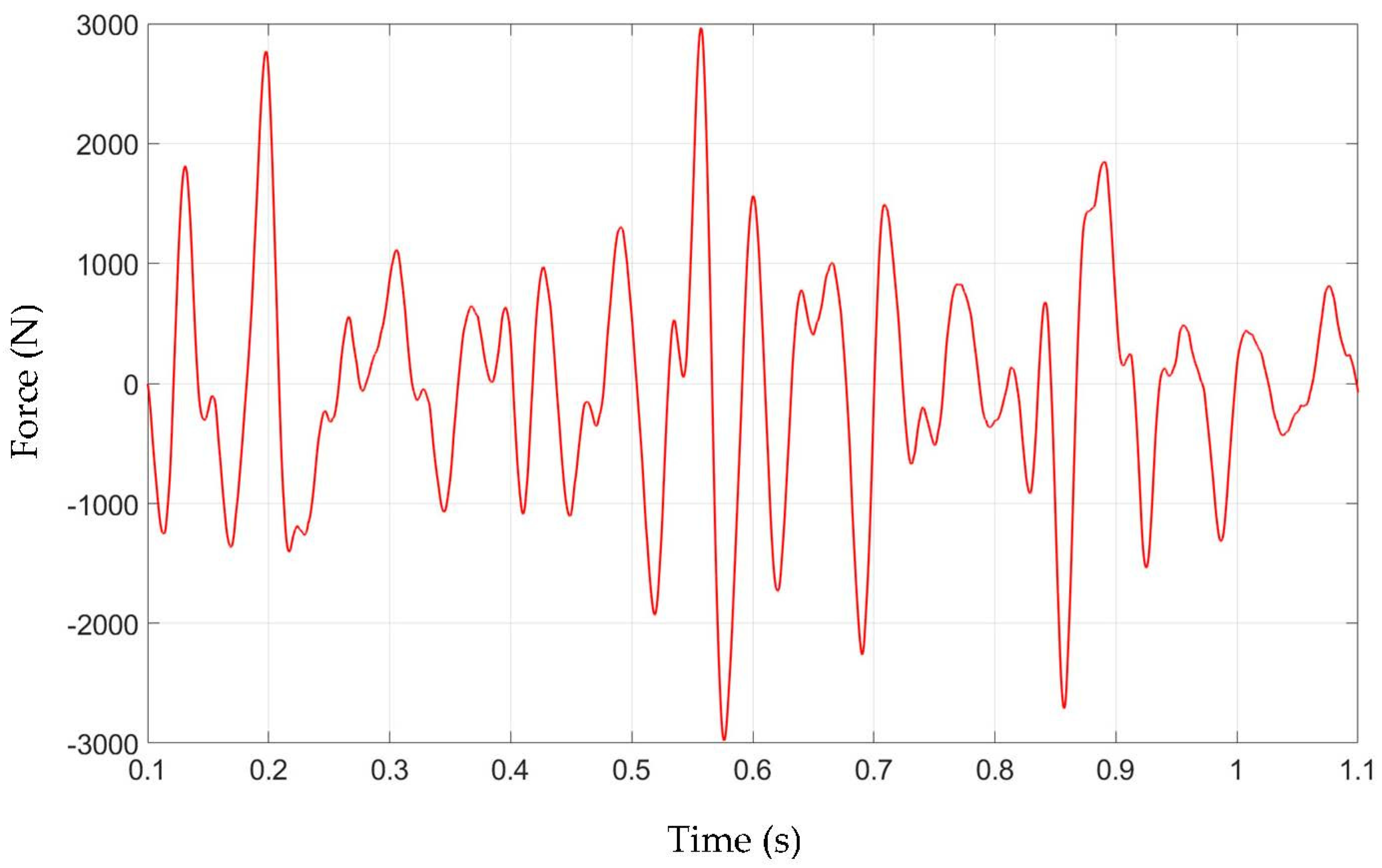
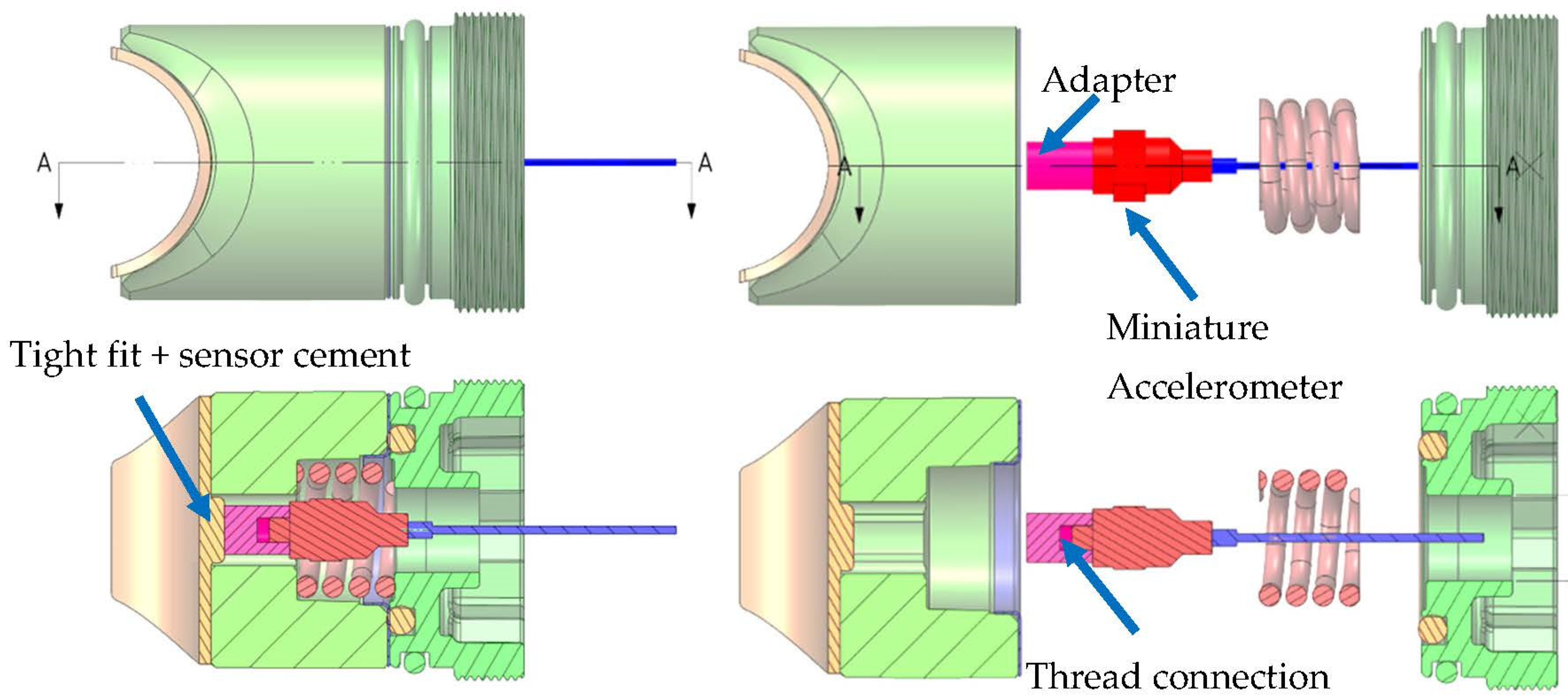
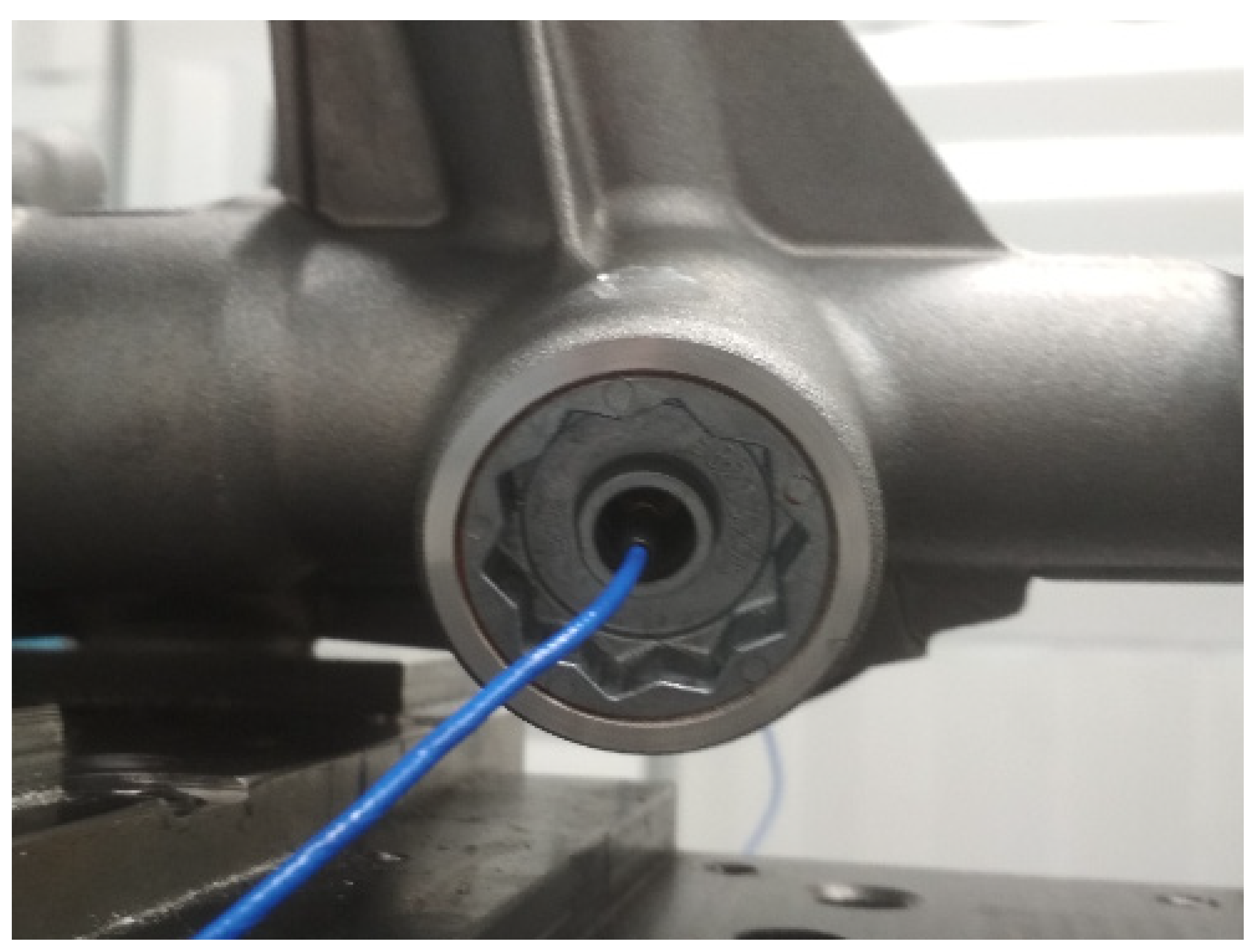
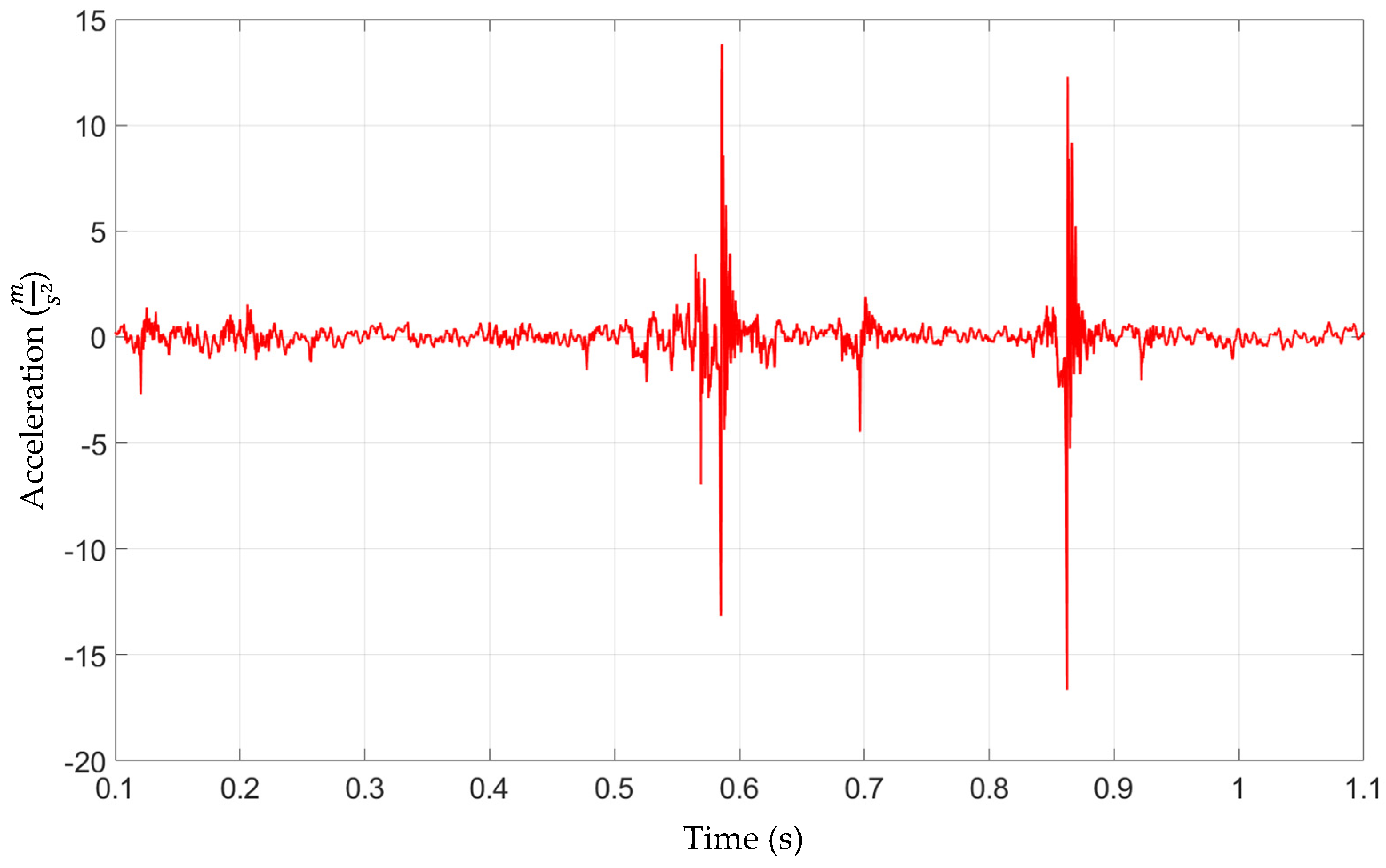
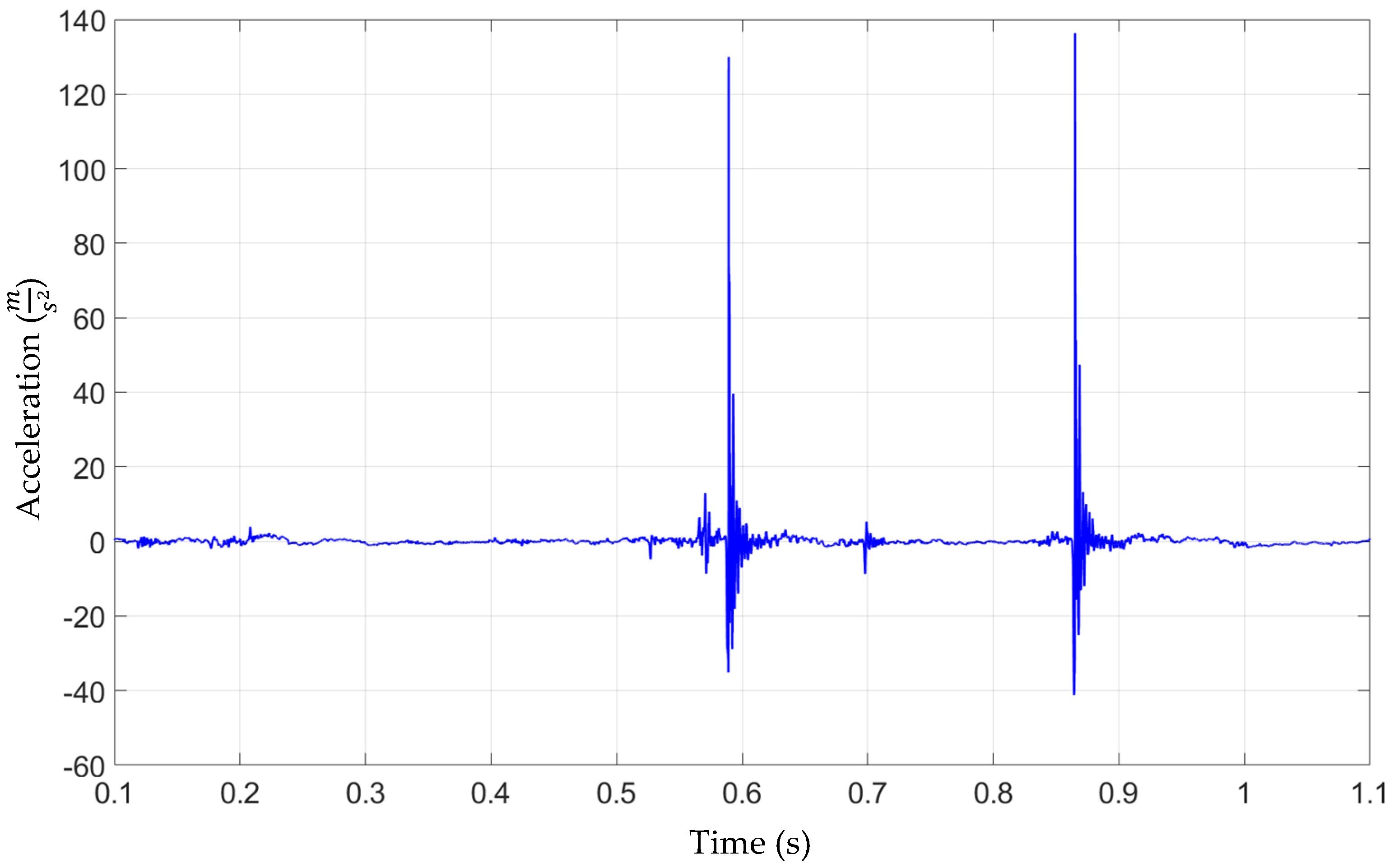
2.2.2. Experimental Measurements
3. Results
3.1. Experimental Measurement Results
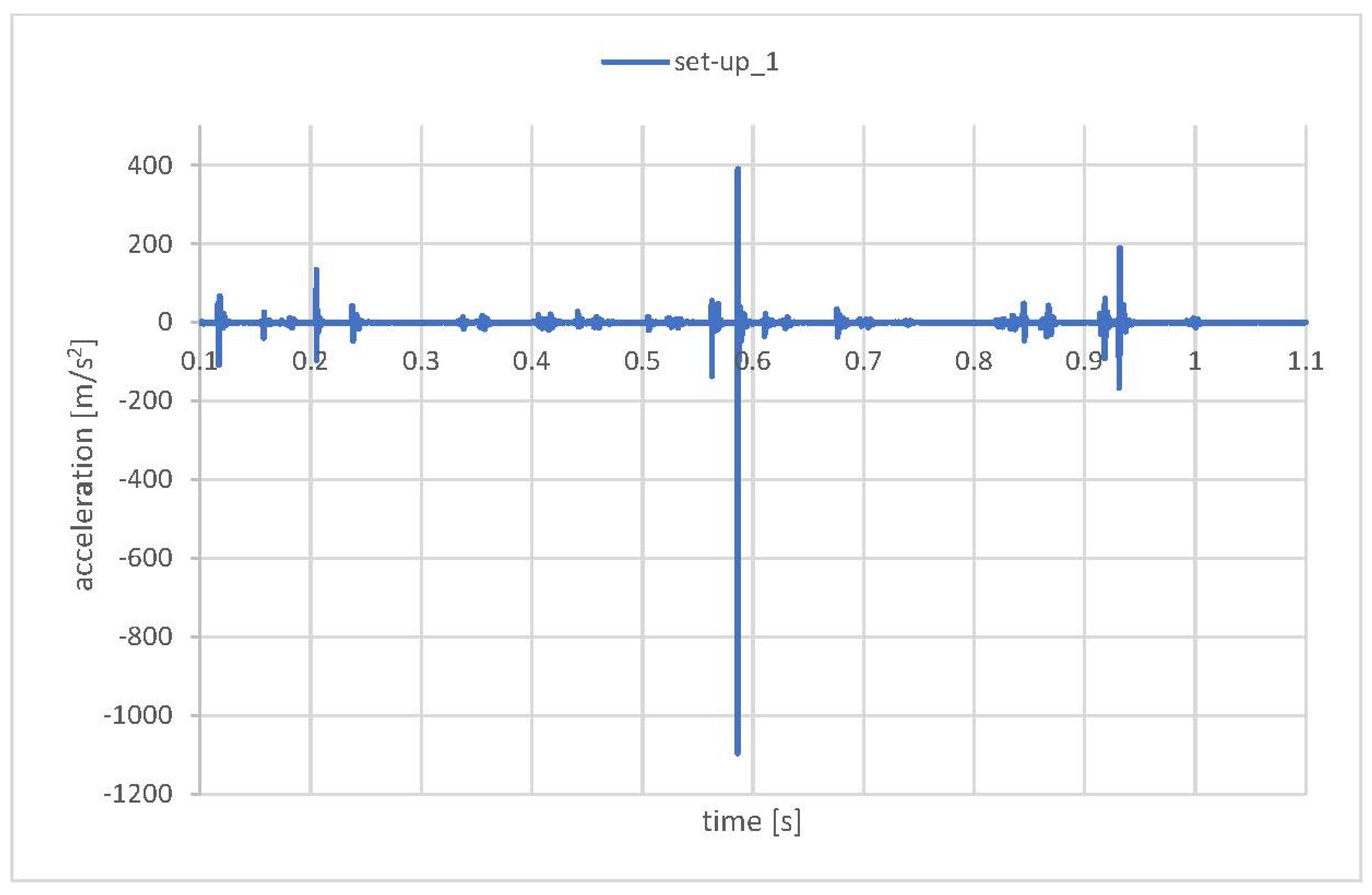
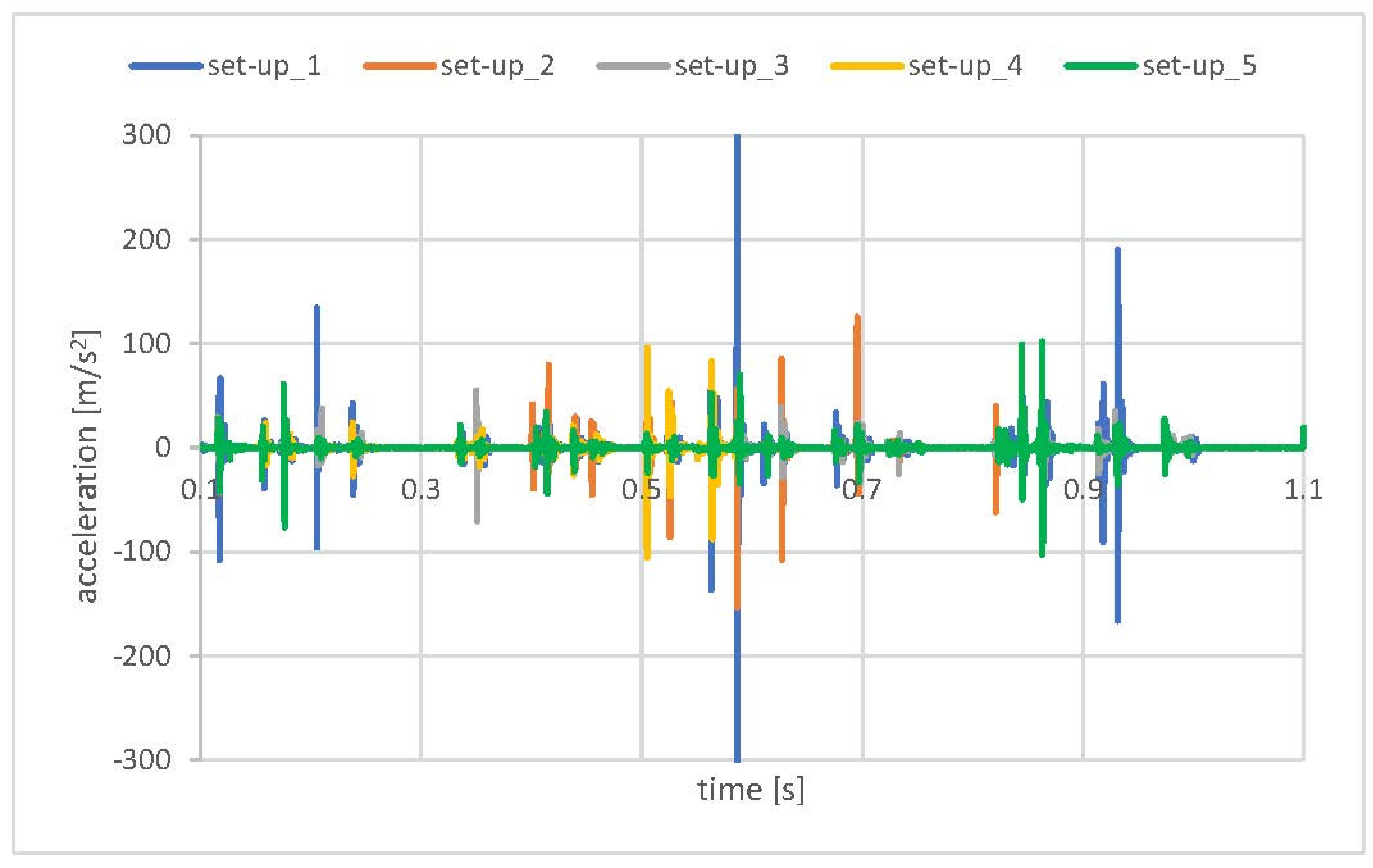
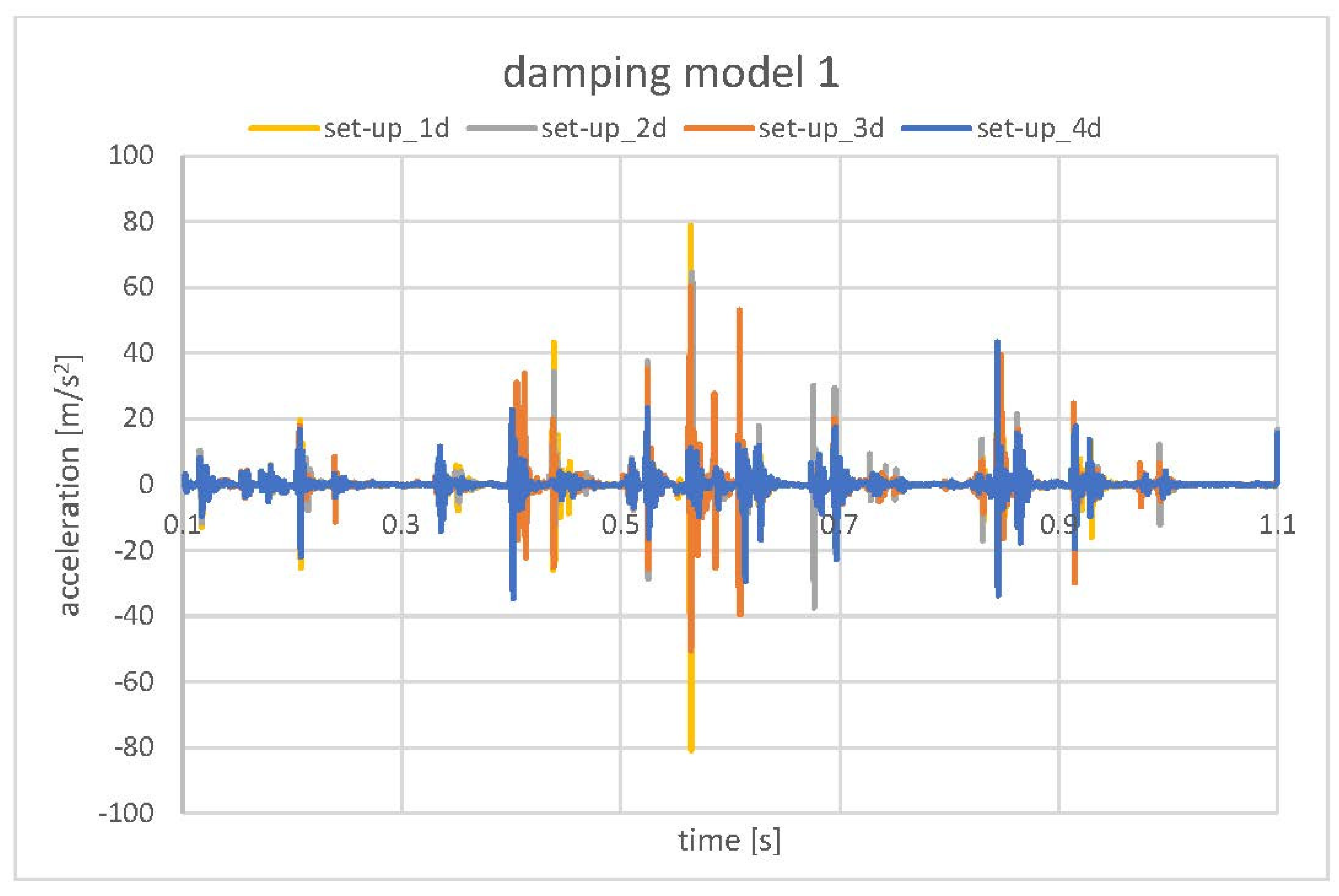
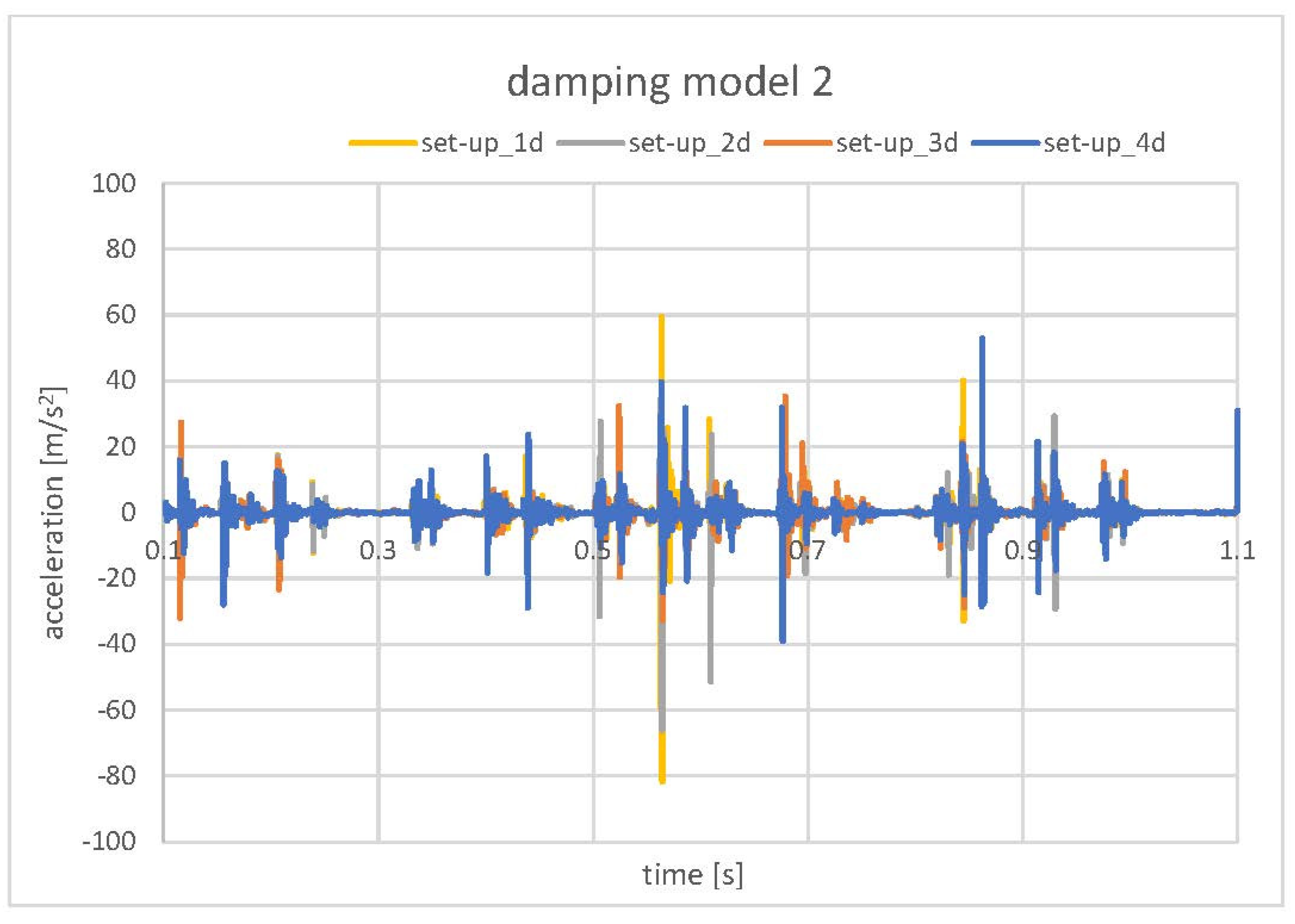
3.2. Numerical Simulation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dyer, G. Analysis of Energy Consumption for Various Power Assisted Steering Systems. SAE Trans. 1997, 106, 525–535. [Google Scholar]
- Nexteer, Nexteer Supplies 40 Millionth Electric Power Steering System. 2020. Available online: https://www.nexteer.com/release/nexteer-supplies-40-millionth-electric-power-steering-system/ (accessed on 20 March 2022).
- Schneider, M.; Wilhelm, M.; Alt, N. Development of Vehicle Sound Quality-Targets and Methods. SAE Trans. 1995, 104, 2193–2206. Available online: http://www.jstor.org/stable/44729278 (accessed on 20 March 2022).
- Huang, H.B.; Wu, J.H.; Huang, X.R.; Ding, W.P.; Yang, M.L. A novel interval analysis method to identify and reduce pure electric vehicle structure-borne noise. J. Sound Vib. 2020, 475, 115258. [Google Scholar] [CrossRef]
- Hartmann, R.; Holbrook, G.; Politano, G. Starting Motor Cranking Sound-Correlation of Objective Noise Measurements to Subjective Jury Ratings; SAE 880080; SAE: Warrendale, PA, USA, 1988. [Google Scholar]
- Kuroda, O.; Fujii, Y. An Approach to Improve Engine Sound Quality; SAE 880083; SAE: Warrendale, PA, USA, 1988. [Google Scholar]
- Sachs, M.; Brackett, S. Subjective Evaluation of Simulated Engine Induction Noise; SAE 891156; SAE: Warrendale, PA, USA, 1989. [Google Scholar]
- Nishio, Y.; Kohama, T.; Kuroda, O. New Approach to Low-Noise Air Intake System Development; SAE Technical Paper 911042; SAE: Warrendale, PA, USA, 1991. [Google Scholar] [CrossRef]
- Sacks, M.; Hackney, S. Performance of Acoustic Components for Engine Induction Systems; SAE 880081; SAE: Warrendale, PA, USA, 1988. [Google Scholar]
- Busch, G.; Maurell, R.; Meyer, J.; Vorwerk, C. Investigations on Influence of Engine Block Design Features on Noise and Vibration. In Proceedings of the 1991 Noise & Vibration Conference, Traverse City, MI, USA, 1 May 1991; p. 244. [Google Scholar]
- Dunne, G.; Wheeler, A.; Jennings, P. The identification of powertrain sound quality target sounds. In Proceedings of the 29th International Congress and Exhibition on Noise Control Engineering, Nice, France, 27–30 August 2000. [Google Scholar]
- Otto, N.; Amman, S.; Eaton, C.; Lake, S. Guidelines for Jury Evaluations of Automotive Sounds; SAE Technical Paper 1999-01-1822; SAE: Warrendale, PA, USA, 1999; pp. 3015–3034. [Google Scholar] [CrossRef] [Green Version]
- Brandl, F.; Biermayer, W. A New Tool for the Onboard Objective Assessment of Vehicle Interior Noise Quality; SAE Technical Paper 1999-01-1695; SAE: Warrendale, PA, USA, 1999. [Google Scholar] [CrossRef]
- Schulte-Fortkamp, B.; Genuit, K.; Fiebig, A. A New Approach for Developing Vehicle Target Sounds. Sound Vib. 2007, 41, 12–17. [Google Scholar]
- Genuit, K.; Schulte-Fortkamp, B. The acoustical design of vehicles: A new tool for benchmarking and target sound. J. Acoust. Soc. Am. 2005, 118, 1887. [Google Scholar] [CrossRef]
- Albert, A.; Schwarz, A. Automated Identification of NVH-Phenomena in Vehicles; SAE Technical Paper 2011-01-1656; SAE: Warrendale, PA, USA, 2011. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, H. An Overview of NVH Problems Caused by Changes in the Excitation Source of HEV. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1194, 012009. [Google Scholar] [CrossRef]
- Putner, J.; Arsic, D. Investigation of NVH Phenomena at Electric Vehicles. ATZextra Worldw. 2018, 23, 38–43. [Google Scholar] [CrossRef]
- Lennström, D.; Lindbom, T.; Nykänen, A. Prominence of Tones in Electric Vehicle Interior Noise. Internoise 2013: Noise Control for Quality of Life; ÖAL Österreichischer Arbeitsring für Lärmbekämpfung: Innsbruck, Austria, 2013; Volume 1, pp. 508–515. [Google Scholar]
- Huang, H.B.; Wu, J.H.; Huang, X.R.; Yang, M.L.; Ding, W.P. A generalized inverse cascade method to identify and optimize vehicle interior noise sources. J. Sound Vib. 2020, 467, 115062. [Google Scholar] [CrossRef]
- Qian, K.; Hou, Z.; Liang, J.; Liu, R.; Sun, D. Interior Sound Quality Prediction of Pure Electric Vehicles Based on Transfer Path Synthesis. Appl. Sci. 2021, 11, 4385. [Google Scholar] [CrossRef]
- Hua, X.; Thomas, A.; Shultis, K. Recent progress in battery electric vehicle noise, vibration, and harshness. Sci. Prog. 2021, 104, 00368504211005224. [Google Scholar] [CrossRef] [PubMed]
- Kwon, S.; Jeon, J.; Park, J.; Lee, H. Quantification of rattle noise generations from automotive compartments by variational mode decomposition. J. Sound Vib. 2022, 517, 116577. [Google Scholar] [CrossRef]
- Ma, C.; Chen, C.; Liu, Q.; Gao, H.; Li, Q.; Gao, H.; Shen, Y. Sound Quality Evaluation of the Interior Noise of Pure Electric Vehicle Based on Neural Network Model. IEEE Trans. Ind. Electron. 2017, 64, 9442–9450. [Google Scholar] [CrossRef]
- Lee, J.; Lee, S.; Kwak, Y. Temporal and spectral characteristics of BSR noises and influence on auditory perception. J. Mech. Sci. Technol. 2015, 29, 5199–5204. [Google Scholar] [CrossRef]
- Rahnejat, H. (Ed.) Tribology and Dynamics of Engine and Powertrain; Woodhead Publishing: Sawston, UK, 2010. [Google Scholar]
- Zheng, X.; Luo, X.; Qiu, Y.; Hao, Z. Modeling and NVH Analysis of a Full Engine Dynamic Model with Valve Train System. Appl. Sci. 2020, 10, 5145. [Google Scholar] [CrossRef]
- Mohammadpour, M.; Theodossiades, S.; Rahnejat, H. Tribo-Dynamics of Differential Hypoid Gears. In Proceedings of the ASME 2013 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2013, Portland, OR, USA, 4–7 August 2013. [Google Scholar]
- Brecher, C.; Brumm, M.; Knecht, P. Improvement of the excitation behavior of bevel gears considering tolerance fields caused by manufacturing and assembly processes. In Proceedings of the International Gear Conference 2014, Lyon, France, 26–28 August 2014; pp. 158–168. [Google Scholar]
- Billenstein, D.; Glenk, C.; Diwisch, P.; Rieg, F. Investigation of Contact Settings on the Result of Topology Optimization to Avoid Contact Stiffness Supports. In Advances in Structural and Multidisciplinary Optimization; Schumacher, A., Vietor, T., Fiebig, S., Bletzinger, K.U., Maute, K., Eds.; WCSMO 2017; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Ling, X. Contact Stiffness Estimation Based on Structural Frequency Response. U.S. Patent 2016/0357893 A1, 8 December 2016. [Google Scholar]
- Stein, E.; de Borst, R.; Hughes, T.J.R. (Eds.) Encyclopedia of Computational Mechanics. In Volume 2: Solids and Structures; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Laursen, T.A. Computational Contact and Impact Mechanics; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Kim, J.-T.; Lee, J.W.; Lee, S.M.; Lee, T.; Kim, W.-G. Study on Mechanism of Impact Noise on Steering Gear While Turning Steering Wheel in Opposite Directions. In Proceedings of the Inter-Noise Conference, Hamburg, Germany, 21–24 August 2016. [Google Scholar]
- Fiebig, W.; Pietrusiak, D.; Wilhelm, J.; Wróbel, J. UKL Steering Gear Vibrations Testing and Modelling. In Faculty of Mechanical Engineering Wroclaw University of Science and Technology Report; Wroclaw University of Science and Technology: Wrocław, Poland, 2019. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Frequency [Hz] | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Mode 1 | Mode 2 | Mode 3 | Mode 4 | Mode 5 | Mode 6 | Mode 7 | Mode 8 | Mode 9 | Mode 10 | |
| Rack | 263 | 300 | 718 | 825 | 1413 | 1595 | 2278 | 2361 | 2601 | 3436 |
| Pinion | 2517 | 2553 | 5345 | 5413 | 8568 | 8714 | 8777 | 13,137 | 13,427 | 13,491 |
| Component | Frequency [Hz] | ||
|---|---|---|---|
| Mode 1 | Mode 2 | Mode 3 | |
| Rack | 260 | 720 | 830 |
| Pinion | 2520 | 2540 | >5 k |
| Set-Up | Parameter | |||
|---|---|---|---|---|
| Contact | Worm Axial Support | CRB Viscous Spring Damping | Worm Rotation | |
| 1 | penalty linear | fixed | no | fixed |
| 2 | penalty linear | elastic | no | fixed |
| 3 | penalty nonlinear | elastic | no | fixed |
| 4 | penalty nonlinear | elastic | 0.1 | fixed |
| 5 | penalty nonlinear | elastic | 0.2 | fixed |
| Set-Up | Parameter | ||||
|---|---|---|---|---|---|
| Contact | Worm Axial Support | CRB Viscous Spring Damping | Worm Rotation | Damping Coefficient μ | |
| 1d | penalty linear | elastic | no | fixed | 0.2 |
| 2d | penalty linear | elastic | no | fixed | 0.15 |
| 3d | penalty linear | elastic | no | fixed | 0.1 |
| 4d | penalty linear | elastic | no | fixed | 0.05 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pietrusiak, D.; Wróbel, J.; Czechowski, M.; Fiebig, W. Dynamic NVH Numerical Analysis of Power Steering in the Presence of Lubricant in the System. Materials 2022, 15, 2406. https://doi.org/10.3390/ma15072406
Pietrusiak D, Wróbel J, Czechowski M, Fiebig W. Dynamic NVH Numerical Analysis of Power Steering in the Presence of Lubricant in the System. Materials. 2022; 15(7):2406. https://doi.org/10.3390/ma15072406
Chicago/Turabian StylePietrusiak, Damian, Jakub Wróbel, Mateusz Czechowski, and Wiesław Fiebig. 2022. "Dynamic NVH Numerical Analysis of Power Steering in the Presence of Lubricant in the System" Materials 15, no. 7: 2406. https://doi.org/10.3390/ma15072406
APA StylePietrusiak, D., Wróbel, J., Czechowski, M., & Fiebig, W. (2022). Dynamic NVH Numerical Analysis of Power Steering in the Presence of Lubricant in the System. Materials, 15(7), 2406. https://doi.org/10.3390/ma15072406