
Prediction of Dynamic Behavior of Large-Scale Ground Using 1 g Shaking Table Test and Numerical Analysis



Abstract
:1. Introduction
2. Materials and Methods
2.1. Soil Properties
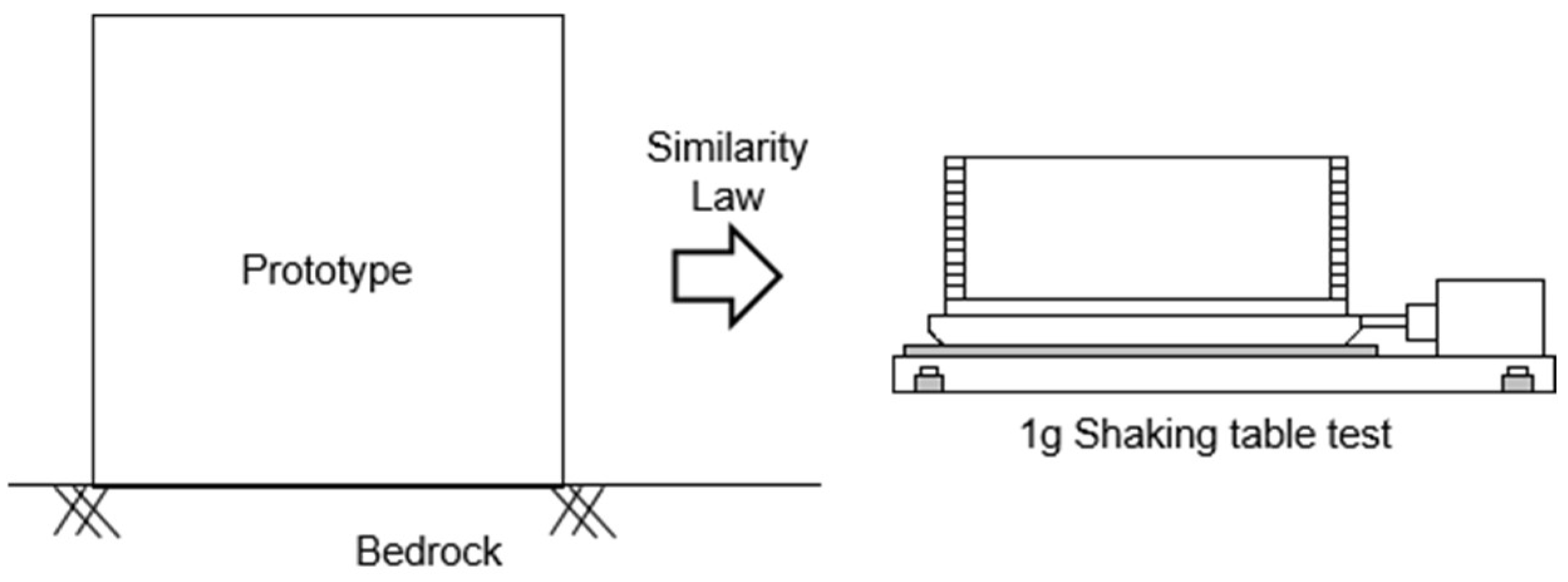
2.2. 1 g Shaking Table Test
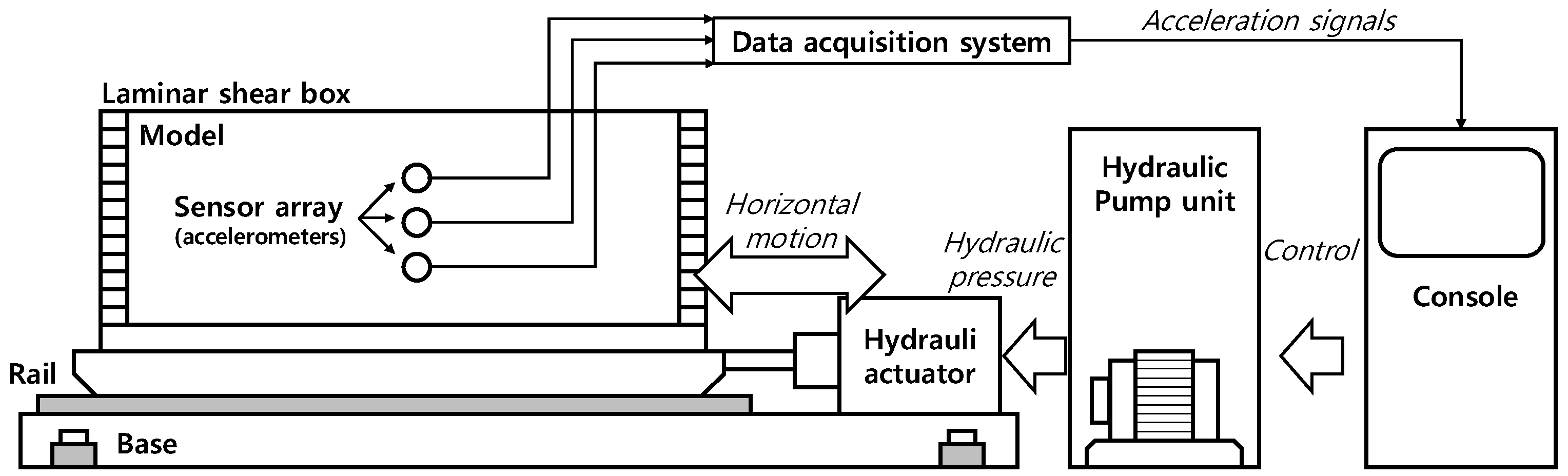
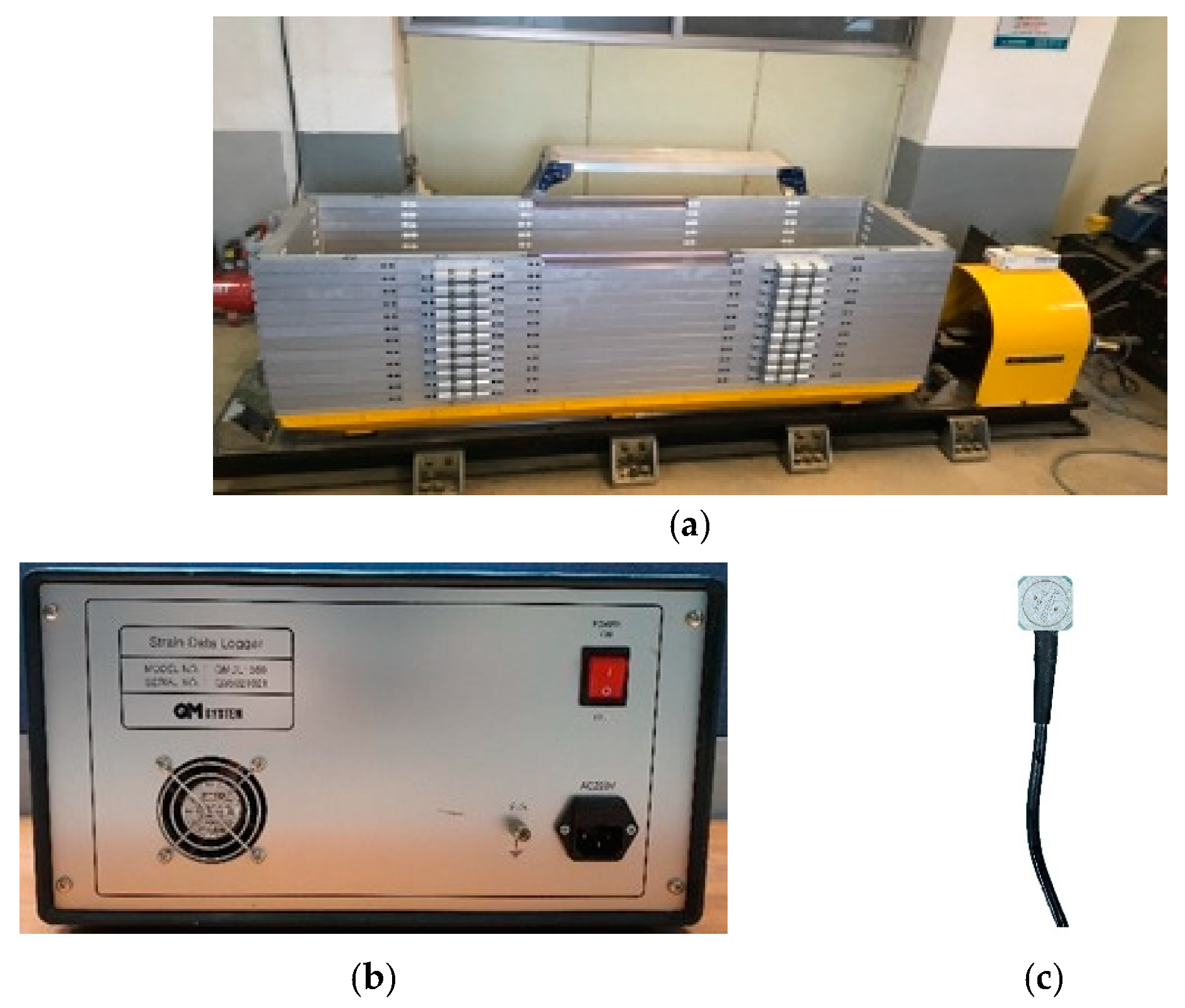
2.2.1. Experimental Equipment
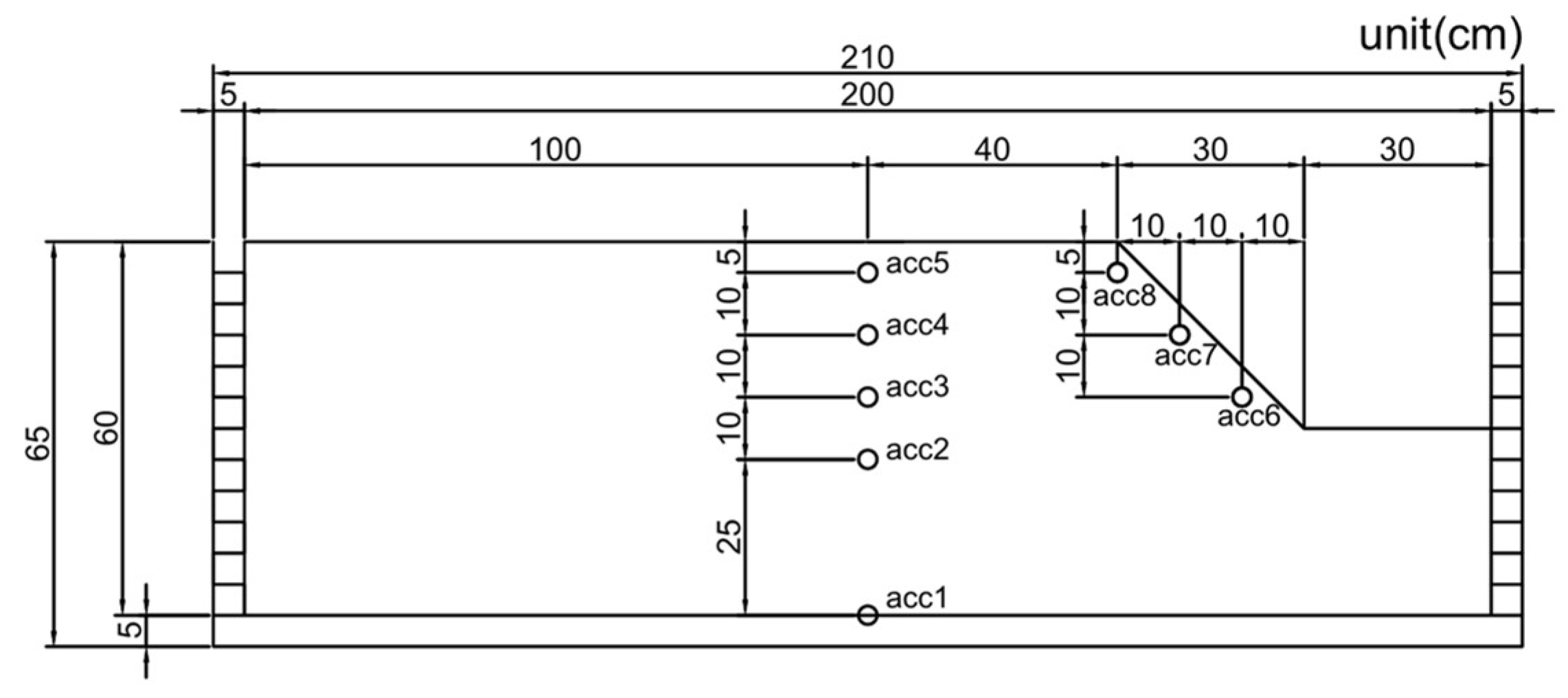
2.2.2. Experimental Method
2.3. Numerical Analysis
2.3.1. DEEPSOIL Program
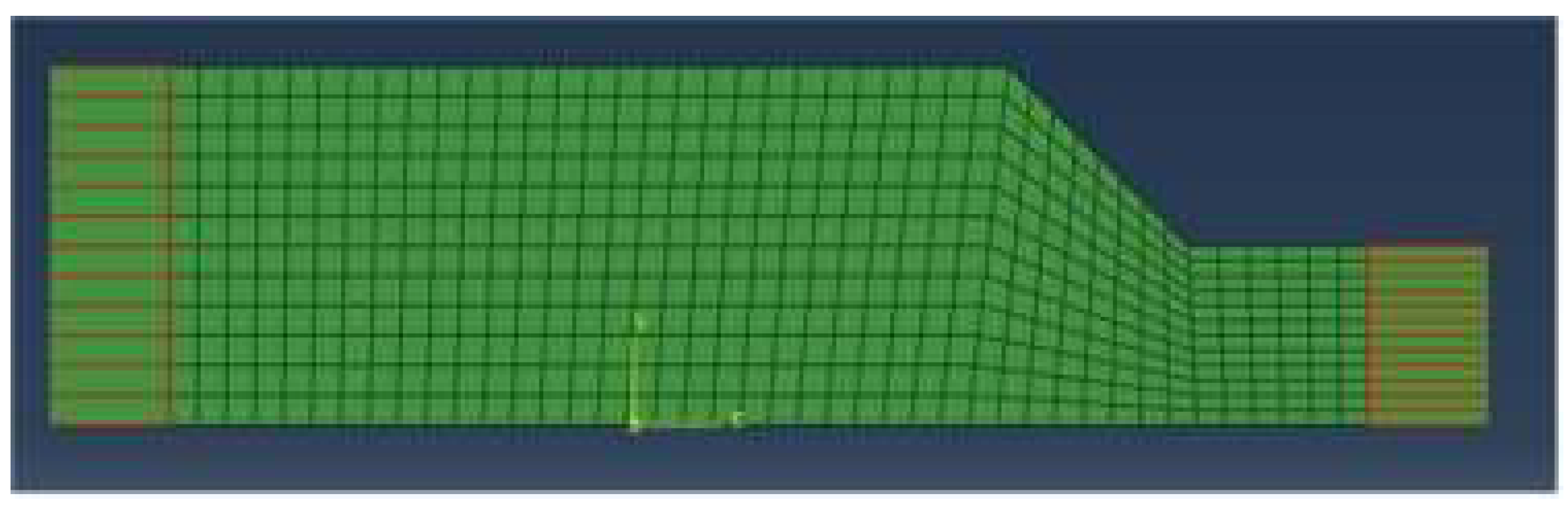
2.3.2. Finite Element Analysis
3. Results and Discussion
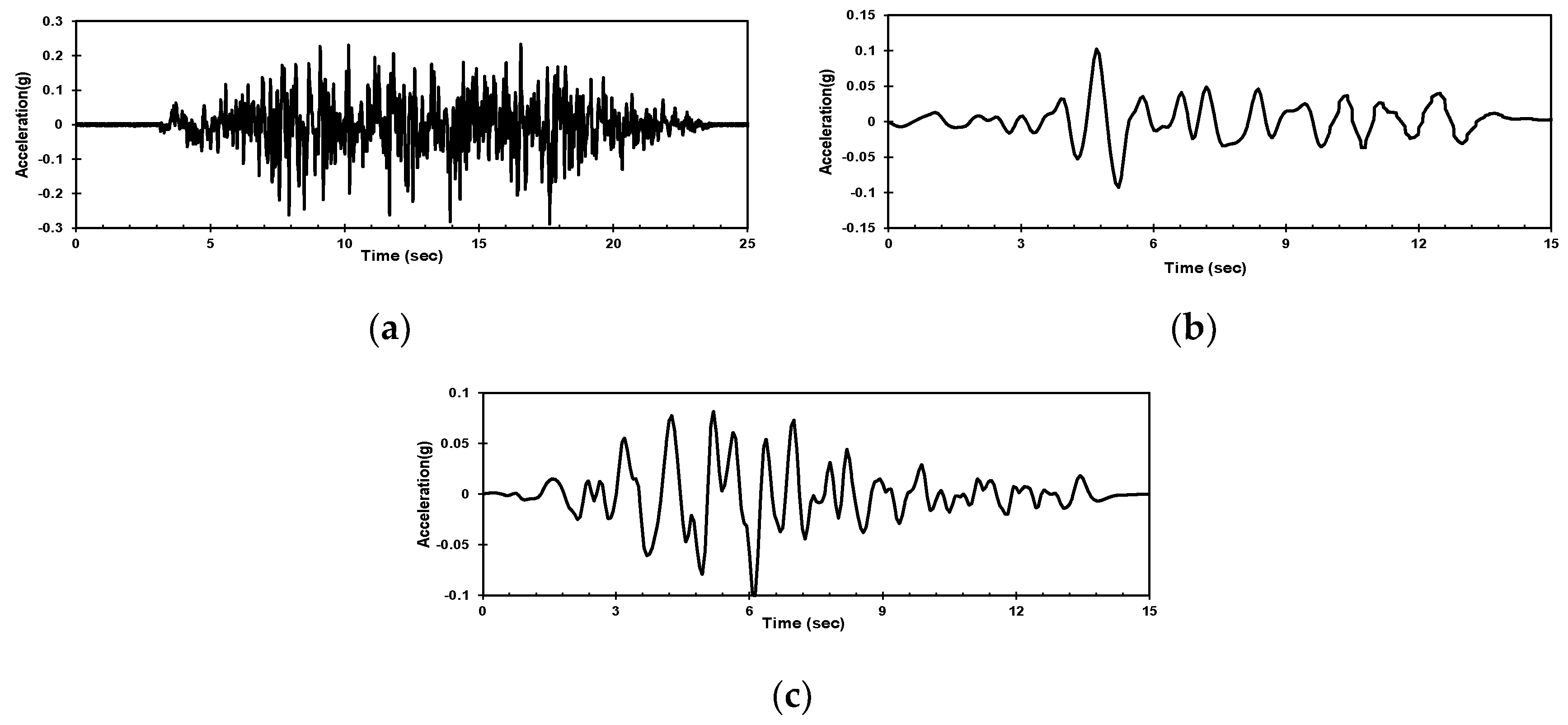
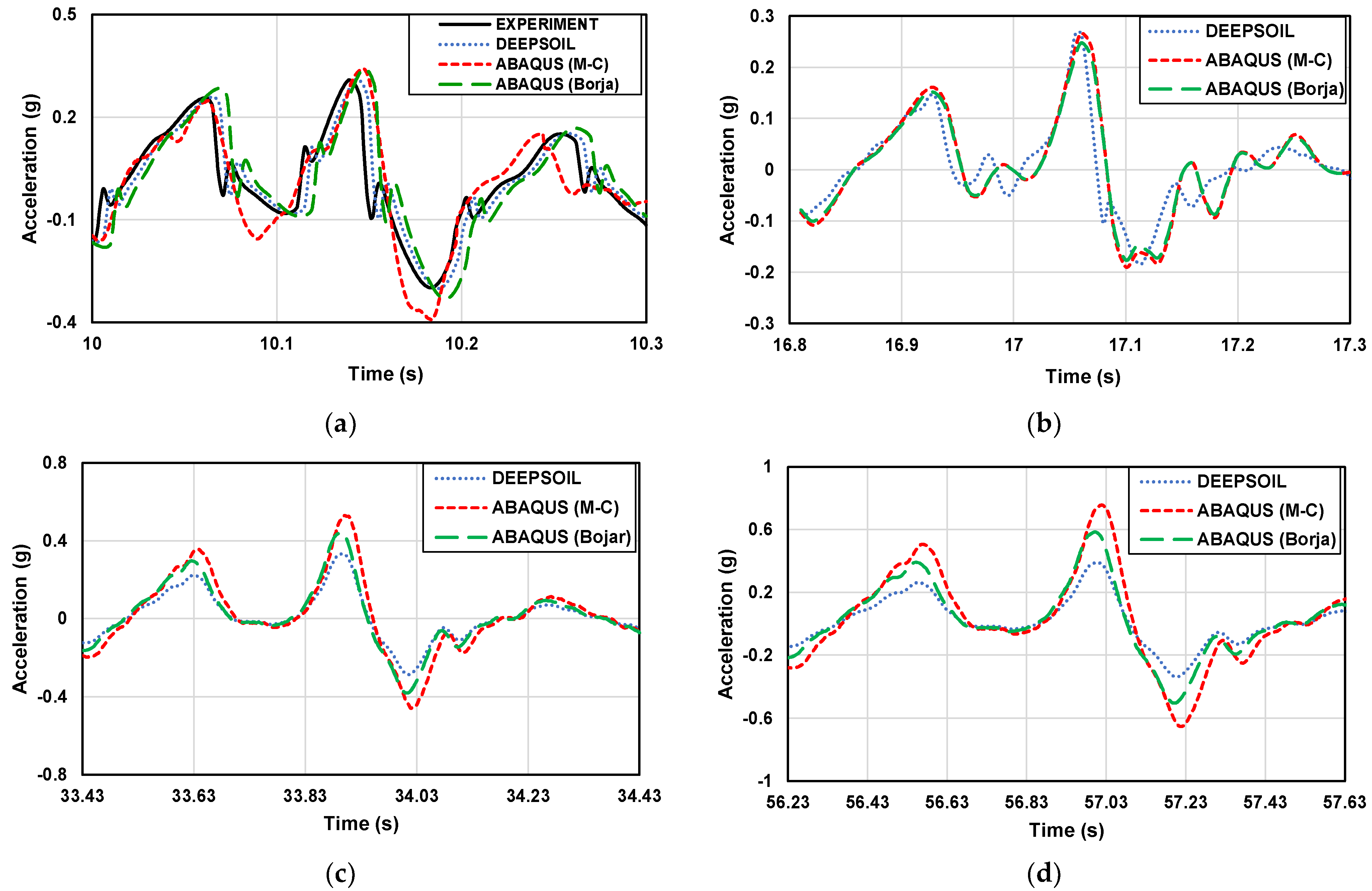
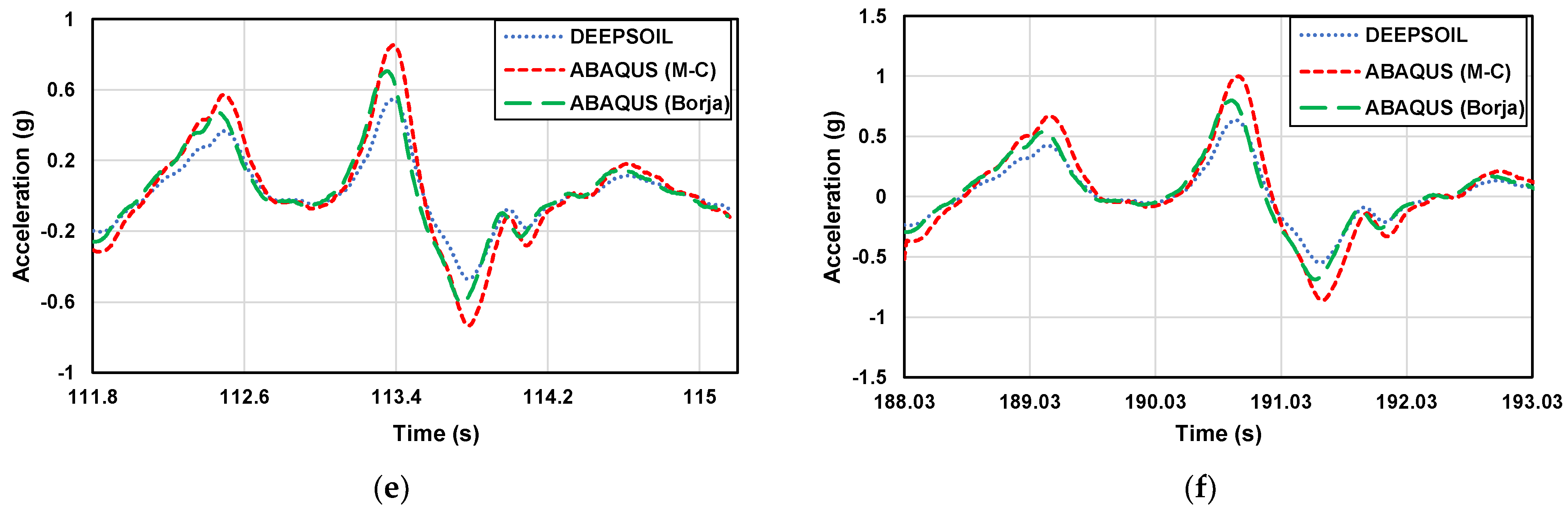
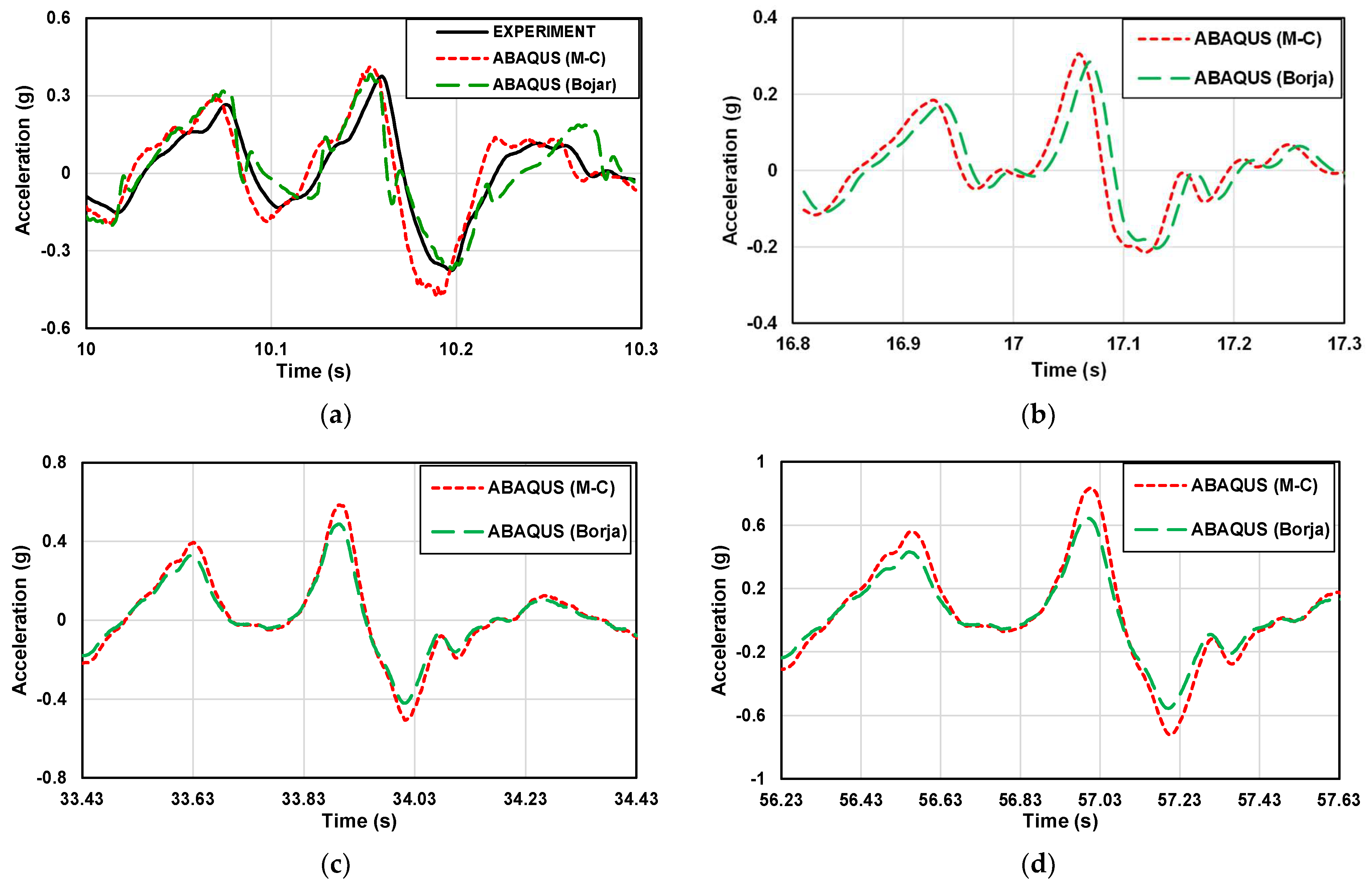
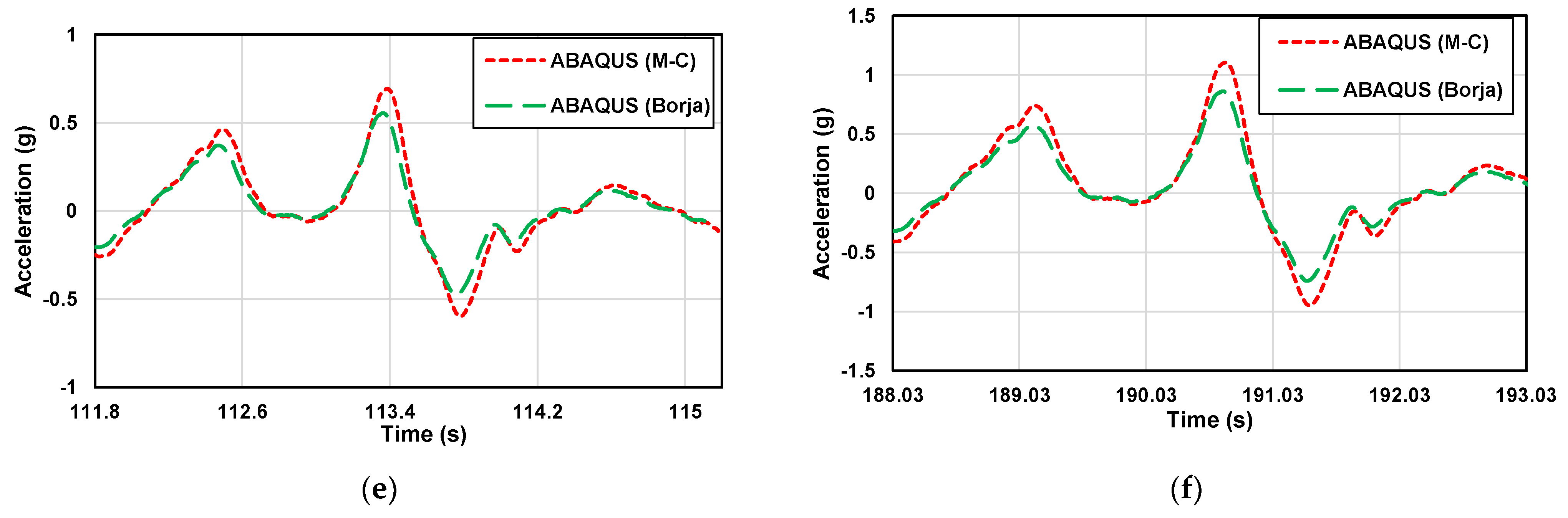
3.1. Acceleration-Time History
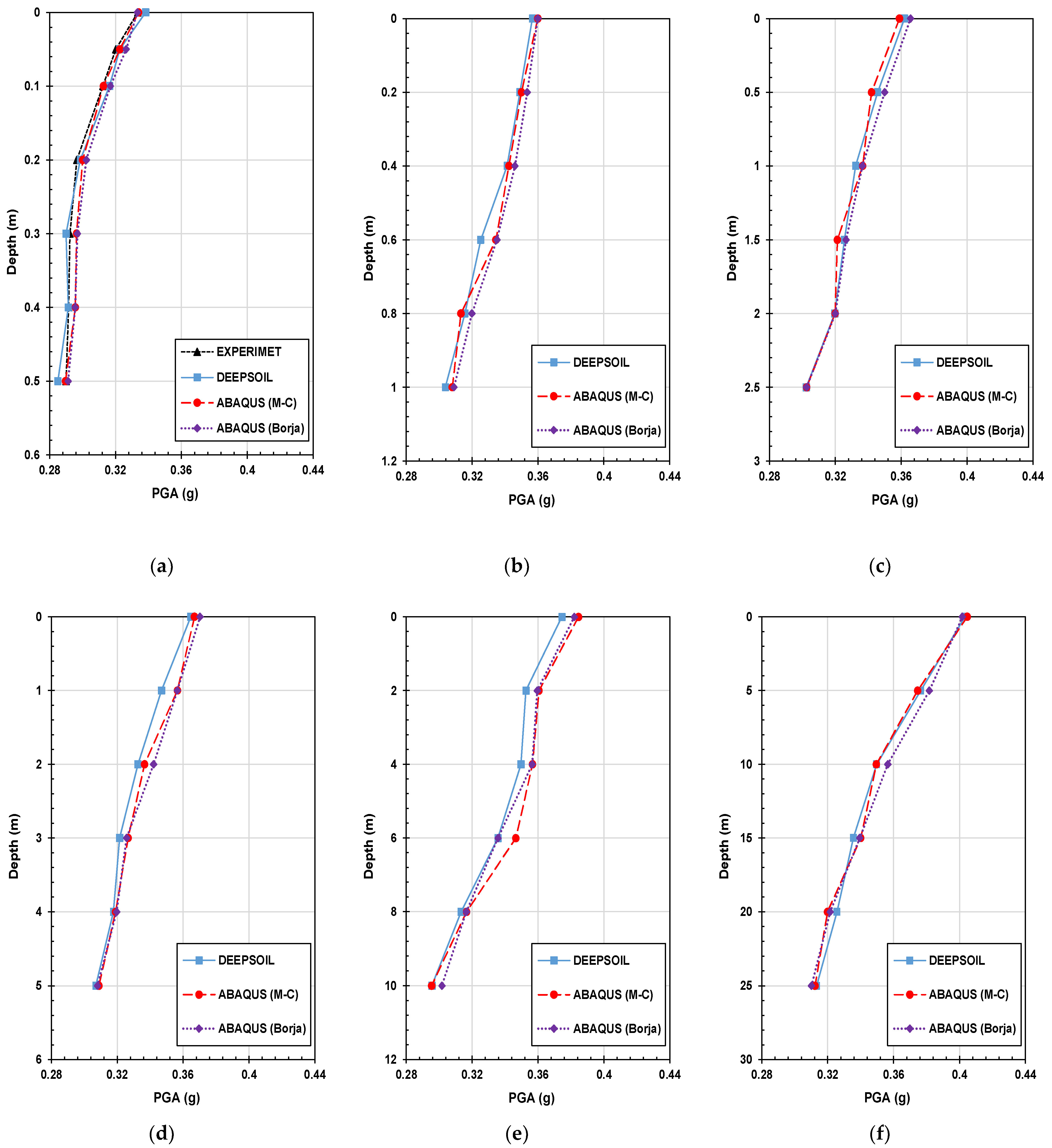
3.2. Peak Ground Acceleration
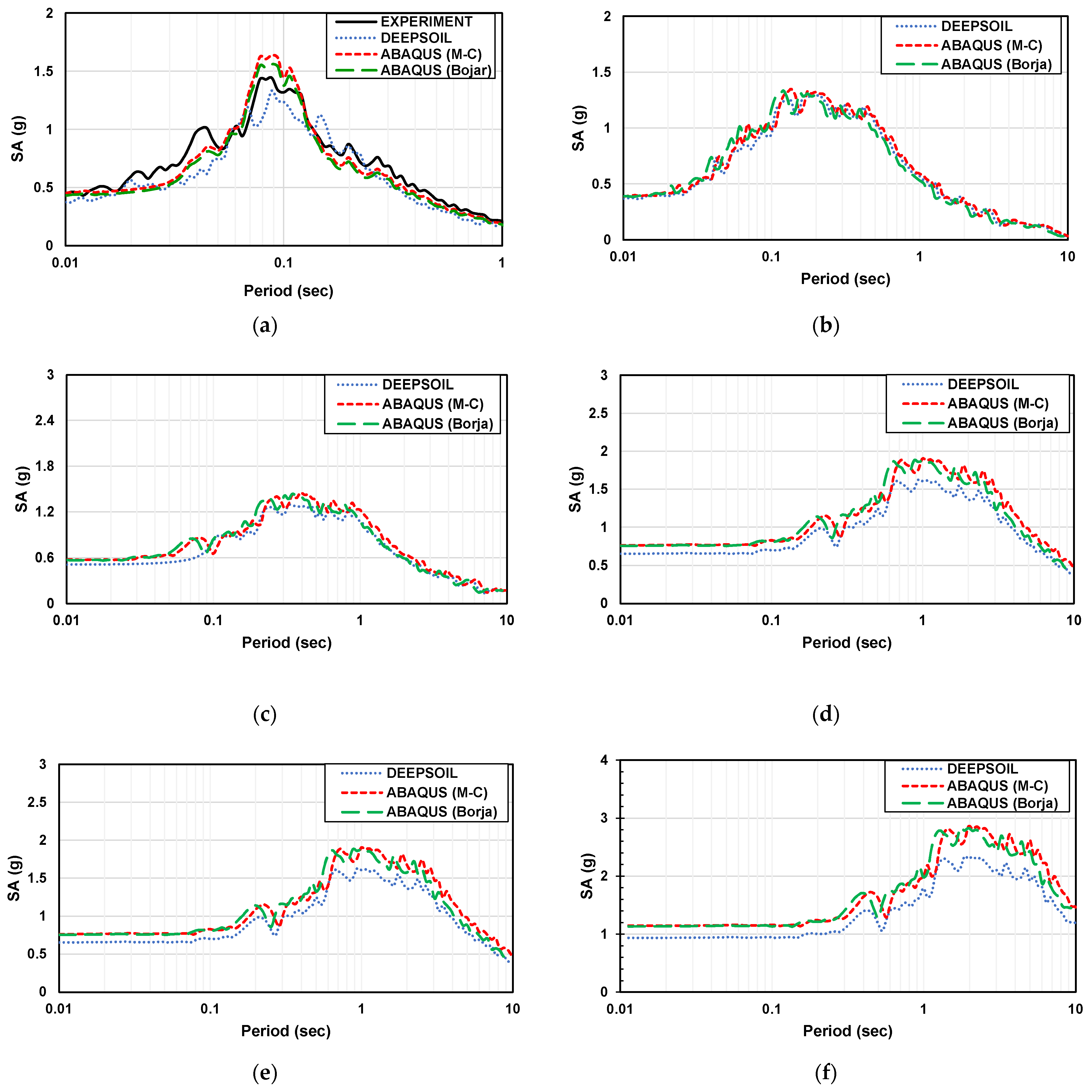
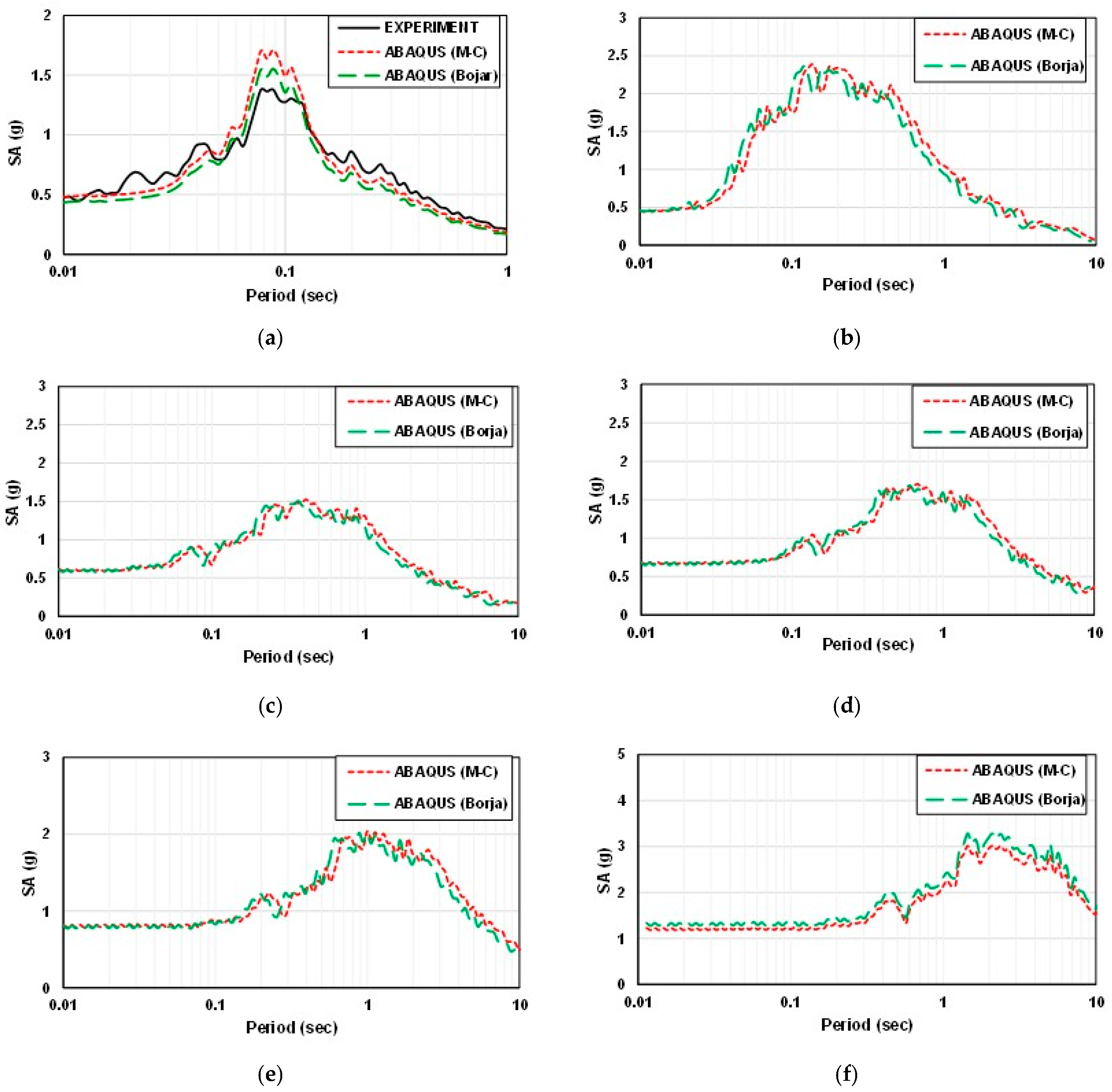
3.3. Spectral Acceleration
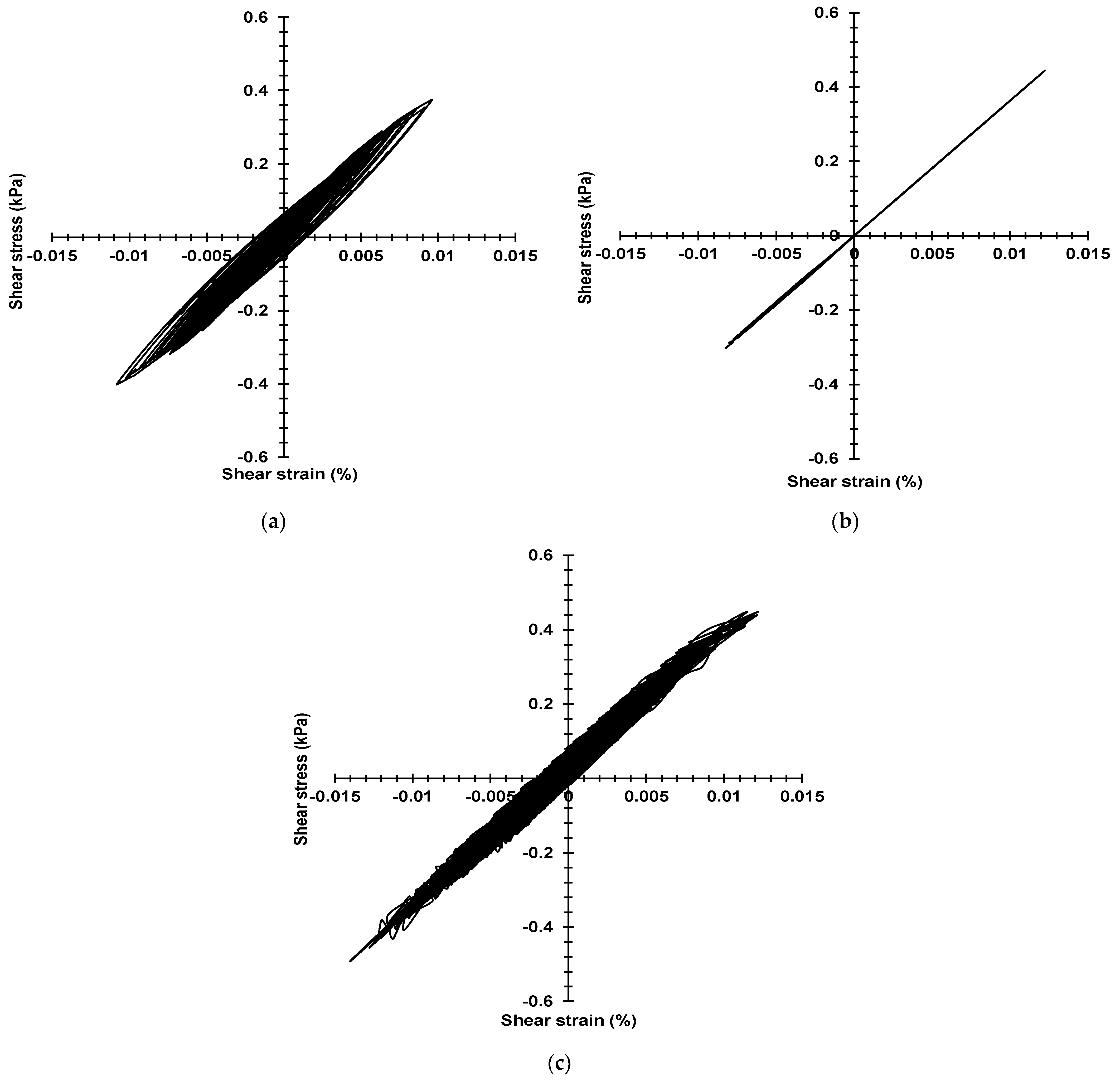
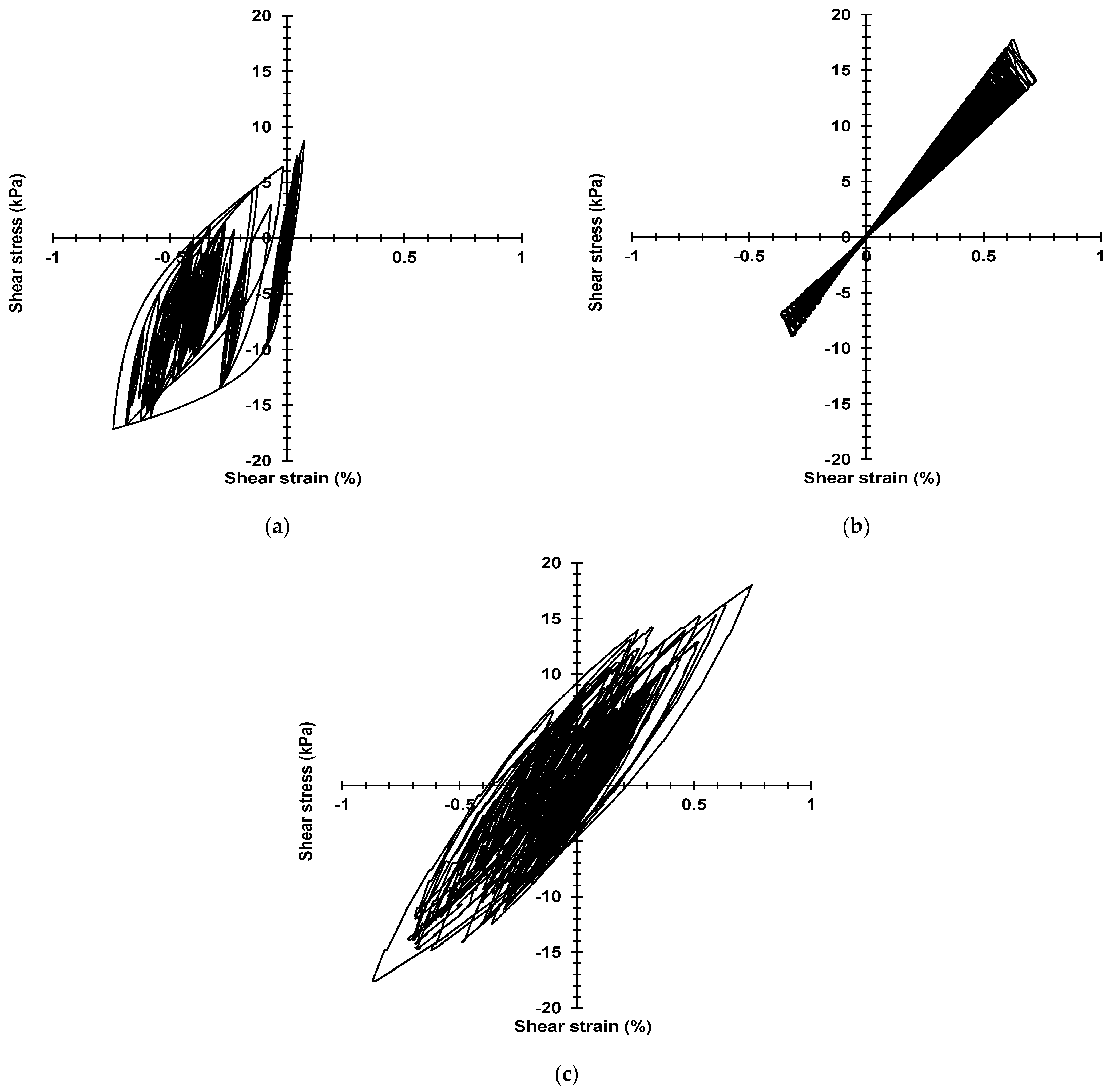
3.4. The Stress–Strain Curve of Large-Scale Models
4. Conclusions
- By comparing RMSE results, the experimental results were in good agreement with the numerical analysis results in terms of consistency. The dynamic behavior of the slope model from the numerical analysis was consistent with that from the 1 g shaking table test. It was shown that the laminar shear box can minimize the influence of boundaries on the dynamic behavior of soil. The laminar shear box was evaluated to perform well for the slope model. The results of the ABAQUS analysis were in good agreement with those of the experimental analysis for the slope model.
- For different constitutive models, the numerical analysis results were still slightly different. For the flat ground, DEEPSOIL results were closer to the experimental results. For the slope model, the Borja model gave better results than the Mohr–Coulomb model. The input parameters of different constitutive models are different, which is why different numerical analysis results exist.
- Numerical analysis was conducted to obtain stress–strain curves for different constitutive models. The numerical analysis results indicated that the Daredneli model did not accurately capture the behavior under high-strain conditions in the dynamic analysis. On the other hand, the Mohr–Coulomb and Borja models performed better in representing the stress–strain response. It highlights the advantage of using nonlinear and elastoplastic models in their respective applicable regions. The Darendeli model sometimes needs to adequately capture the dynamic behavior of soils under more significant strains, but the Borja model does not.
- The 1 g shaking table test provides a valuable method to evaluate numerical analysis, capture complex behavior, and resolve uncertainties, ultimately leading to more robust and reliable analysis and enhancing the value of the 1 g shaking table test.
- In this study, extensive numerical analysis has been performed to overcome the size limitation of the 1 g shaking table test in predicting the dynamic behavior of real-scale ground. Combining the results of numerical analysis and the 1 g shaking table test, as well as a series of theories, such as the similarity law, the 1 g shaking table experiment can replace the centrifuge test. An equation has been developed to obtain the natural frequency of the real-scale ground. In actual earthquake engineering, the natural frequency can be obtained by this method. The prediction and analysis of the dynamic behavior of large-scale ground by numerical analyses along with the 1 g shaking table test is significant.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, H.; Kim, D.; Lee, Y.; Kim, H. Effect of soil box boundary conditions on dynamic behavior of model soil in 1 g shaking table test. Appl. Sci. 2020, 10, 4642. [Google Scholar] [CrossRef]
- Saha, R.; Haldar, S.; Dutta, S.C. Influence of dynamic soil-pile raft-structure interaction: An experimental approach. Earthq. Eng. Eng. Vib. 2015, 14, 625–645. [Google Scholar] [CrossRef]
- Niu, J.; Jiang, X.; Yang, H.; Wang, F. Seismic response characteristics of a rock slope with small spacing tunnel using a large-scale shaking table. Geotech. Geol. Eng. 2018, 36, 2707–2723. [Google Scholar] [CrossRef]
- Lin, M.L.; Wang, K.L. Seismic slope behavior in a large-scale shaking table model test. Eng. Geol. 2016, 86, 118–133. [Google Scholar] [CrossRef]
- Kheradi, H.; Nagano, K.; Nishi, H.; Zhang, F. 1-g shaking table tests on seismic enhancement of existing box culvert with partial ground-improvement method and its 2D dynamic simulation. Soils Found. 2018, 58, 563–581. [Google Scholar] [CrossRef]
- Zarnani, S.; El-Emam, M.M.; Bathurst, R.J. Comparison of numerical and analytical solutions for reinforced soil wall shaking table tests. Geomech. Eng. 2011, 3, 291–321. [Google Scholar] [CrossRef]
- Pitilakis, D.; Dietz, M.; Wood, D.M.; Clouteau, D.; Modaressi, A. Numerical simulation of dynamic soil–structure interaction in shaking table testing. Soil Dyn. Earthq. Eng. 2008, 28, 453–467. [Google Scholar] [CrossRef]
- Moghadam, M.R.; Baziar, M.H. Seismic ground motion amplification pattern induced by a subway tunnel: Shaking table testing and numerical simulation. Soil Dyn. Earthq. Eng. 2016, 83, 81–97. [Google Scholar] [CrossRef]
- Guo, M.Z.; Gu, K.S.; Wang, C. Dynamic response and failure process of a counter-bedding rock slope under strong earthquake conditions. Symmetry 2022, 14, 103. [Google Scholar] [CrossRef]
- Aldaikh, H.; Alexander, N.A.; Ibraim, E.; Knappett, J. Shake table testing of the dynamic interaction between two and three adjacent buildings (SSSI). Soil Dyn. Earthq. Eng. 2016, 89, 219–232. [Google Scholar] [CrossRef]
- Shunzo, O. Introduction to Earthquake Engineering; Wiley: Hoboken, NJ, USA, 1973. [Google Scholar]
- Kagawa, T. On the similitude in model vibration tests of earth-structures. In Proceedings of the Japan Society of Civil Engineers; Japan Society of Civil Engineers: Tokyo, Japan, 1978; Volume 1978, pp. 69–77. [Google Scholar]
- Iai, S. Similitude for shaking table tests on soil-structure-fluid model in 1 g gravitational field. Soils Found 1989, 29, 105–118. [Google Scholar] [CrossRef]
- Zhang, W.; Esmaeilzadeh Seylabi, E.; Taciroglu, E. Validation of a three-dimensional constitutive model for nonlinear site response and soil-structure interaction analyses using centrifuge test data. Int. J. Numer. Anal. Methods Geomech. 2017, 41, 1828–1847. [Google Scholar] [CrossRef]
- Sadiq, S.; Van Nguyen, Q.; Jung, H.; Park, D. Effect of flexibility ratio on seismic response of cut-and-cover box tunnel. Adv. Civ. Eng. 2019, 2019, 4905329. [Google Scholar] [CrossRef]
- Kim, H.; Jin, Y.; Lee, Y.; Kim, H.S.; Kim, D. Dynamic response characteristics of embankment model for various slope angles. J. Korean Geosynth. Soc. 2020, 19, 35–46. [Google Scholar] [CrossRef]
- Darendeli, M.B. Development of a New Family of Normalized Modulus Reduction and Material Damping Curves. Ph.D. Thesis, The University of Texas at Austin, Austin, TX, USA, 2001. [Google Scholar]
- Borja, R.I.; Lin, C.H.; Sama, K.M.; Masada, G.M. Modelling non-linear ground response of non-liquefiable soils. Earthq. Eng. Struct. Dyn. 2000, 29, 63–83. [Google Scholar] [CrossRef]
- Boore, D.M.; Joyner, W.B. Site amplifications for generic rock sites. Bull. Seismol. Soc. Am. 1997, 87, 327–341. [Google Scholar] [CrossRef]
- Graves, R.W.; Aagaard, B.T.; Hudnut, K.W.; Star, L.M.; Stewart, J.; Jordan, T.H. Broadband simulations for Mw 7.8 southern San Andreas earthquakes: Ground motion sensitivity to rupture speed. Geophys. Res. Lett. 2008, 35, L22302. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| No. 200 Passing (%) | 10.8 | emax | 1.123 |
| Gs | 2.69 | emin | 0.443 |
| OMC (%) | 12.5 | rd max (kN/m3) | 18.27 |
| PI (%) | NP | rd min (kN/m3) | 12.43 |
| USCS | SW-SM |
| Item | Specification |
|---|---|
| Table size (mm) | 2000 × 600 |
| Maximum acceleration (g) | 1 |
| Full play load (kg) | 1800 |
| Payload capacity (kg) | 5000 |
| Operating frequency (Hz) | 10 |
| Item | Specification | Item | Specification | Item | Specification |
|---|---|---|---|---|---|
| Mass density | 1 | Length | λ | Acceleration | 1 |
| Frequency | λ−1 | Shear wave velocity | λ−0.5 | Stress | λ |
| Modulus | 1 | Time | λ0.75 | Strain | 1 |
| Parameter | Value |
|---|---|
| Unit weight (kN/m3) | 17.658 |
| OCR | 1 |
| N | 10 |
| K0 | 0.5 |
| Frequency | , |
| Parameter | Value |
|---|---|
| Density (kg/m3) | 1800 |
| Poisson’s ratio | 0.3 |
| Poisson’s ratio | 0.3 |
| Internal friction angle (°) | 27.7 |
| Cohesion yield stress (kN) | 10 |
| Dilatancy angle (°) | 24.4 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Density (kg/m3) | 1800 | Young’s modulus (Pa) | |
| Poisson’s ratio | 0.3 | h | 2 MPa |
| m | 0.8 | R | 50 kpa |
| Omega | 0.414 | xi | 0.0785 |
| H0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, Y.; Jeong, S.; Kim, D. Prediction of Dynamic Behavior of Large-Scale Ground Using 1 g Shaking Table Test and Numerical Analysis. Materials 2023, 16, 6093. https://doi.org/10.3390/ma16186093
Jin Y, Jeong S, Kim D. Prediction of Dynamic Behavior of Large-Scale Ground Using 1 g Shaking Table Test and Numerical Analysis. Materials. 2023; 16(18):6093. https://doi.org/10.3390/ma16186093
Chicago/Turabian StyleJin, Yong, Sugeun Jeong, and Daehyeon Kim. 2023. "Prediction of Dynamic Behavior of Large-Scale Ground Using 1 g Shaking Table Test and Numerical Analysis" Materials 16, no. 18: 6093. https://doi.org/10.3390/ma16186093
APA StyleJin, Y., Jeong, S., & Kim, D. (2023). Prediction of Dynamic Behavior of Large-Scale Ground Using 1 g Shaking Table Test and Numerical Analysis. Materials, 16(18), 6093. https://doi.org/10.3390/ma16186093