
A Scenario-Based Analysis of Forest Product Transportation Using a Hybrid Fuzzy Multi-Criteria Decision-Making Method


Abstract
:1. Introduction
2. Materials and Methods
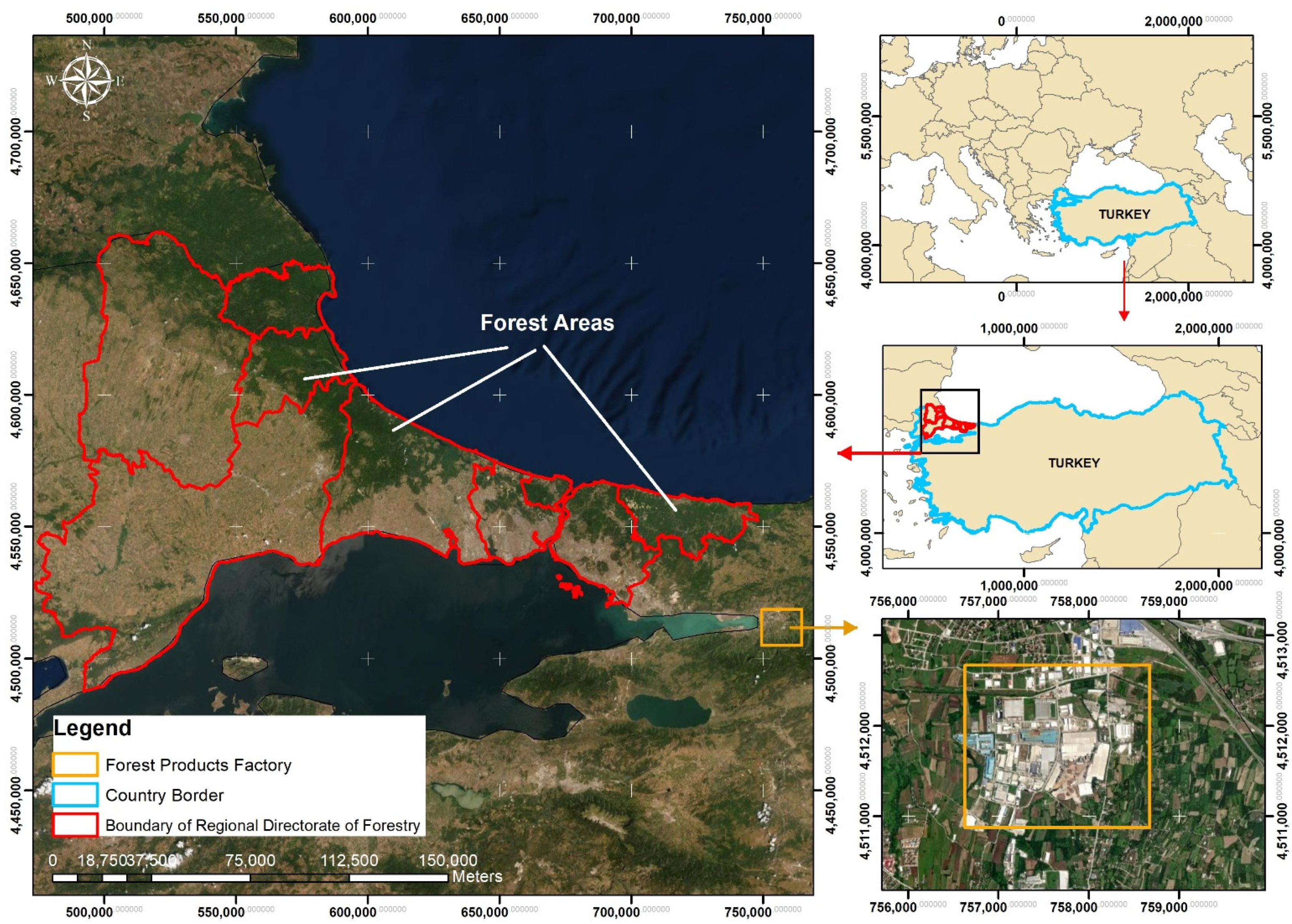
2.1. Study Area
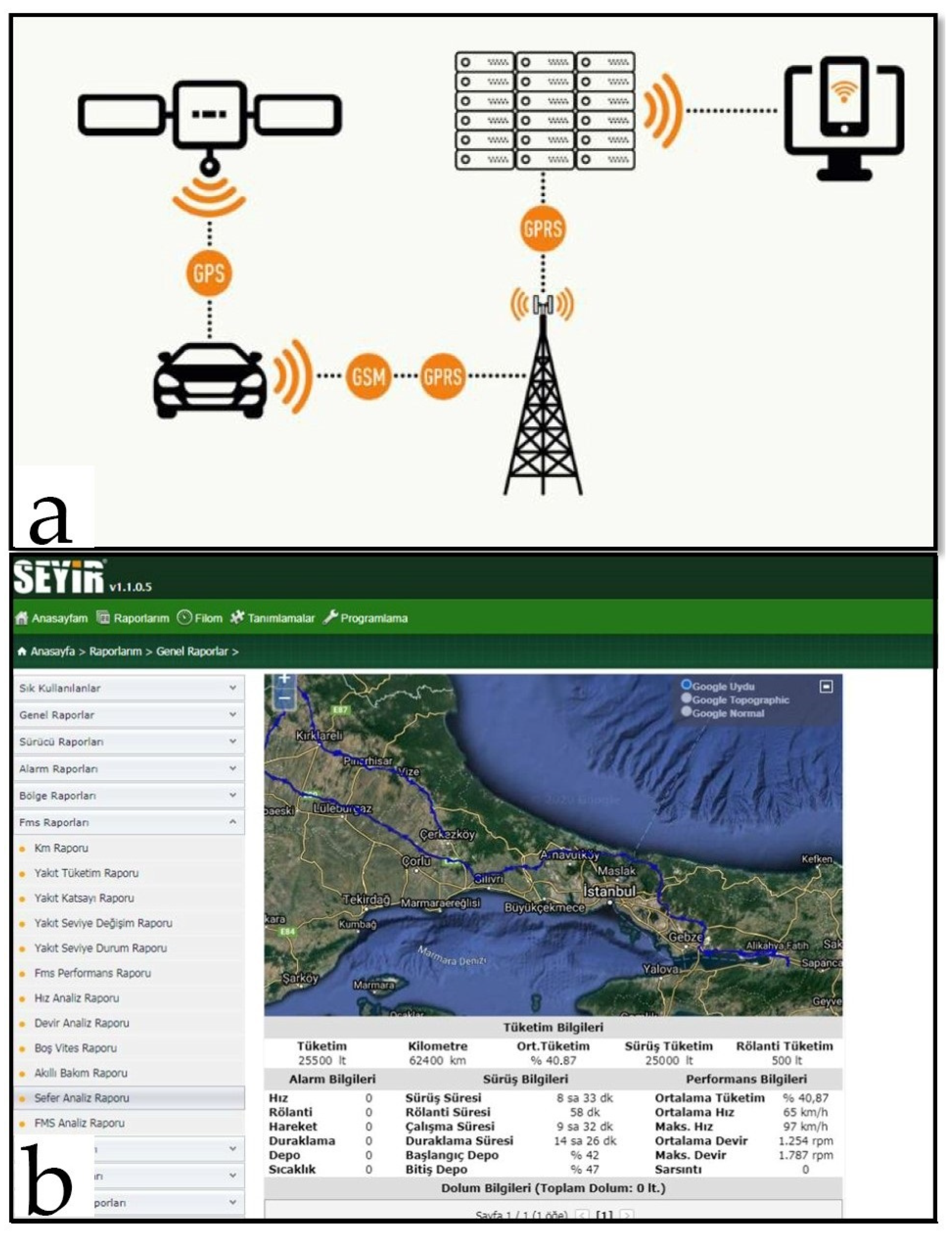
2.2. Time Consumption Studies
2.3. Fuzzy AHP Method
i = 1, 2, …, k
2.4. TOPSIS Method
3. Results and Discussion
3.1. Determination of Weights of Criteria by Fuzzy AHP Method
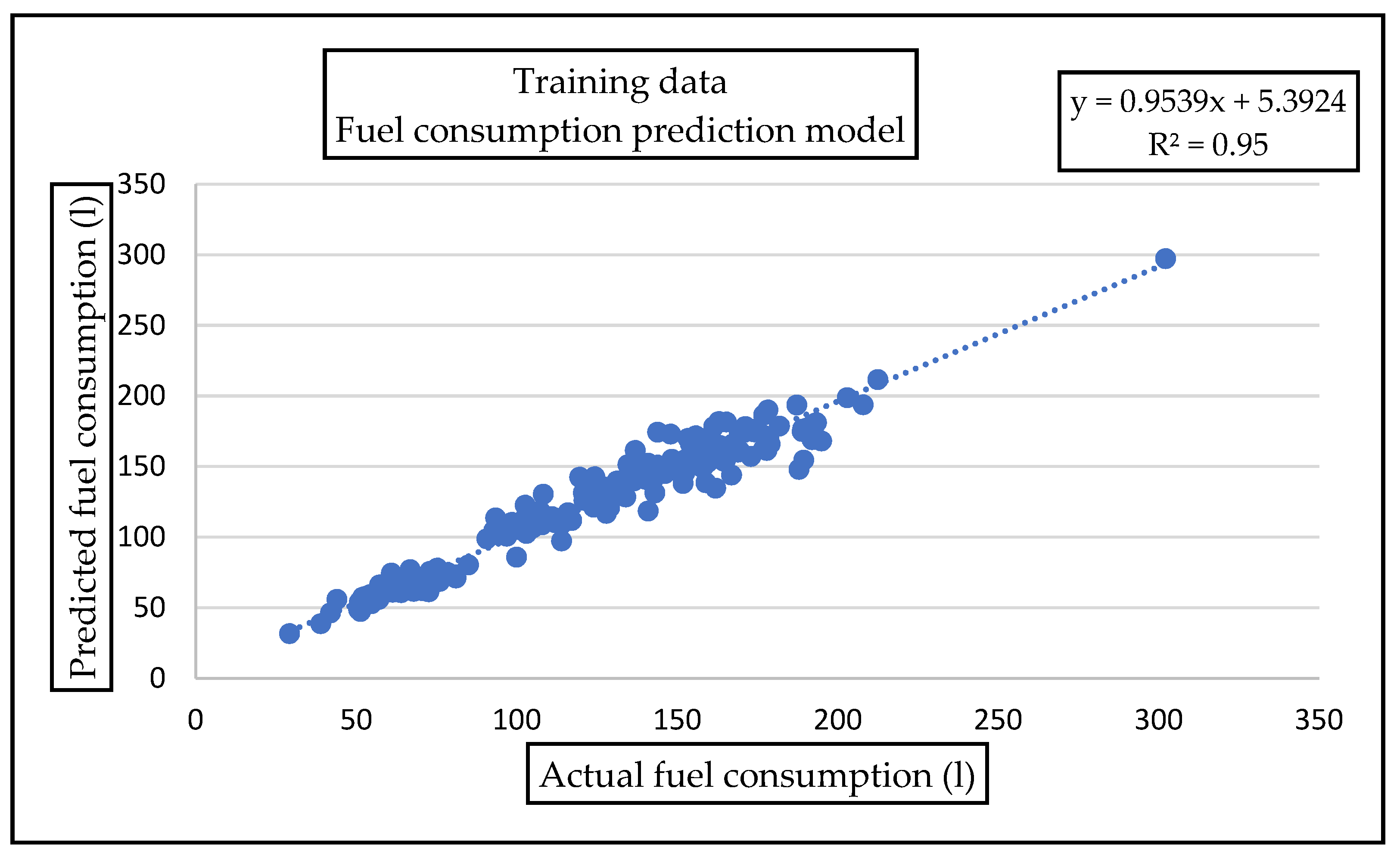
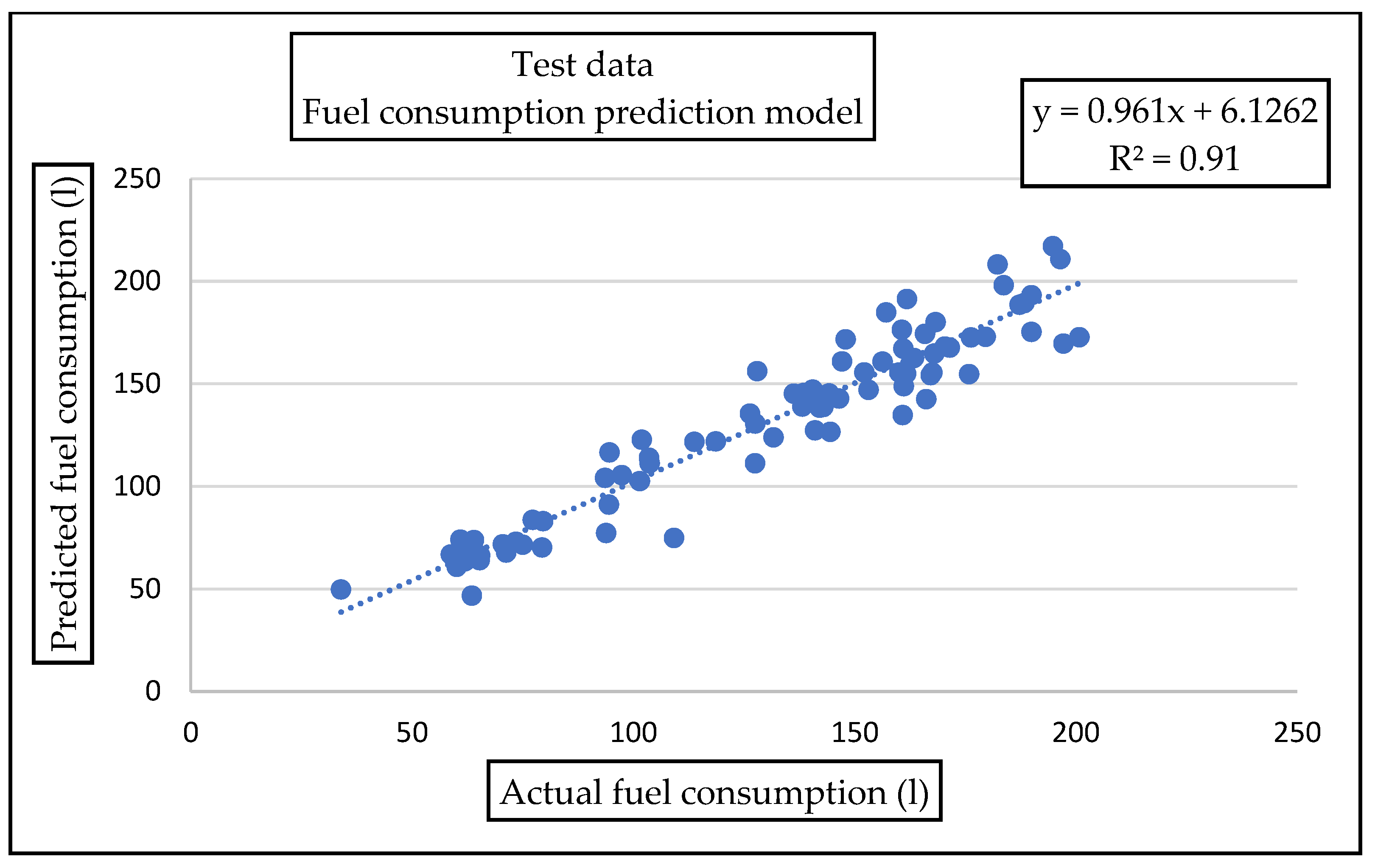
3.2. Prediction of Vehicle Fuel Consumption
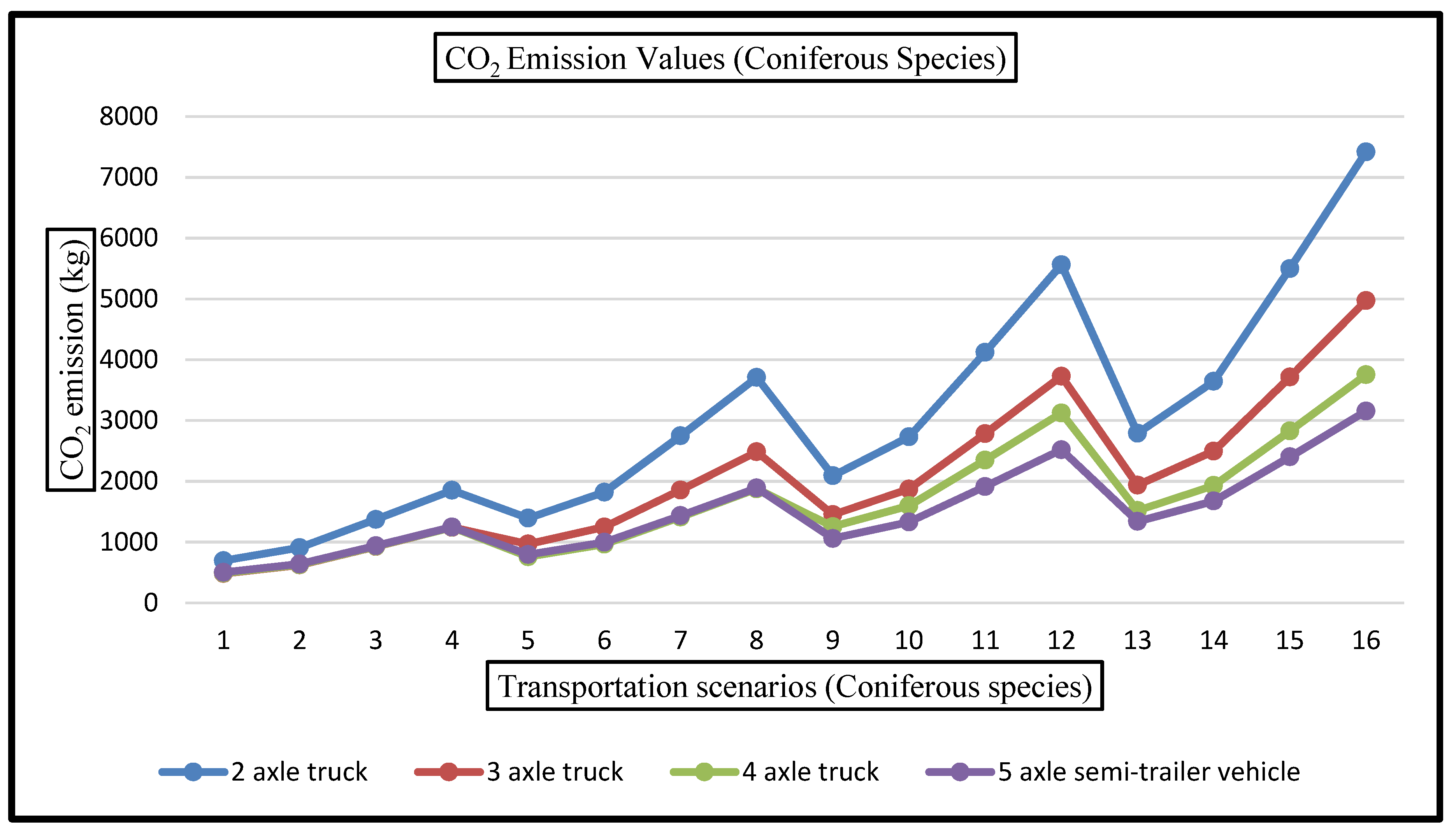
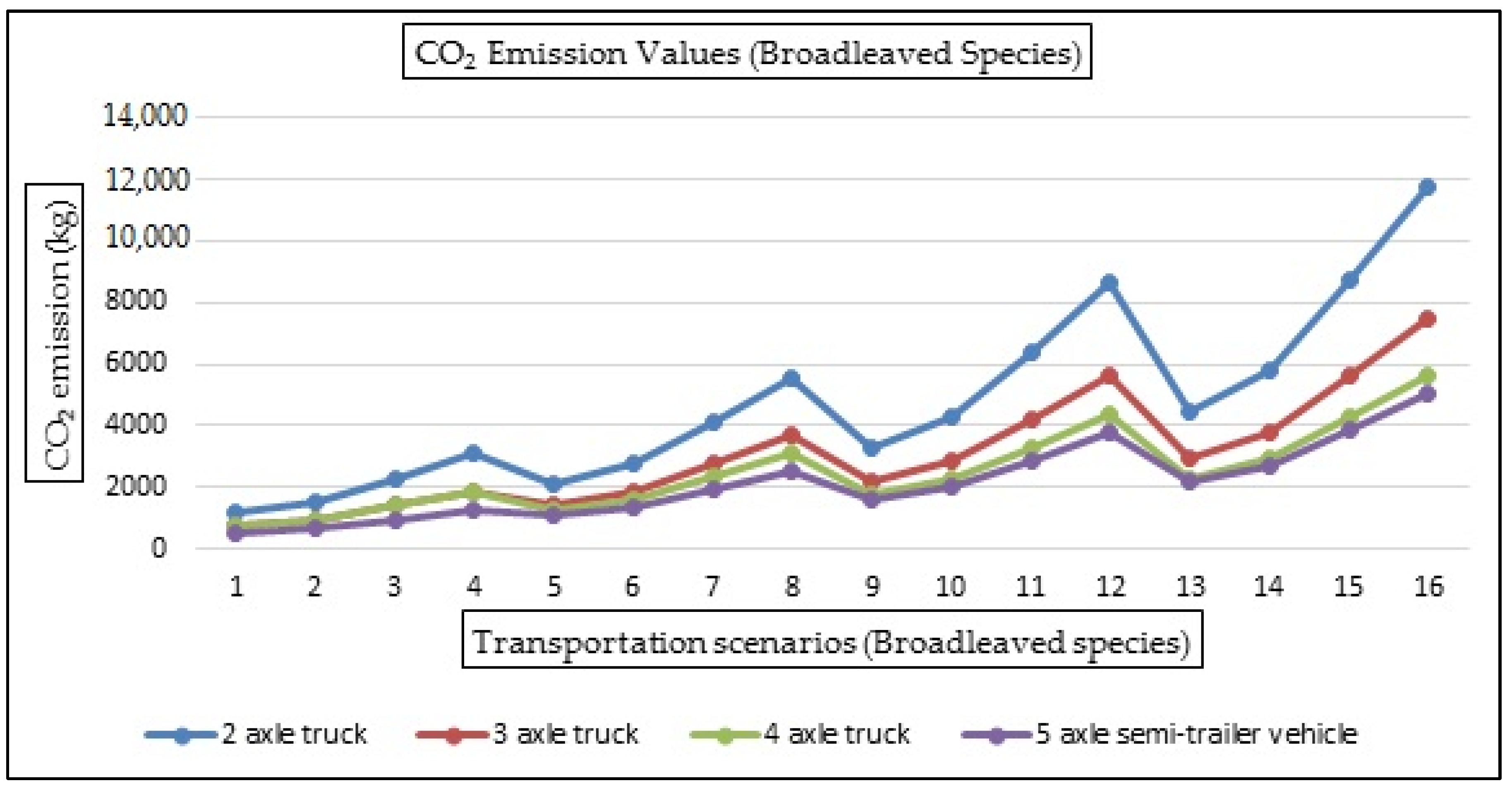
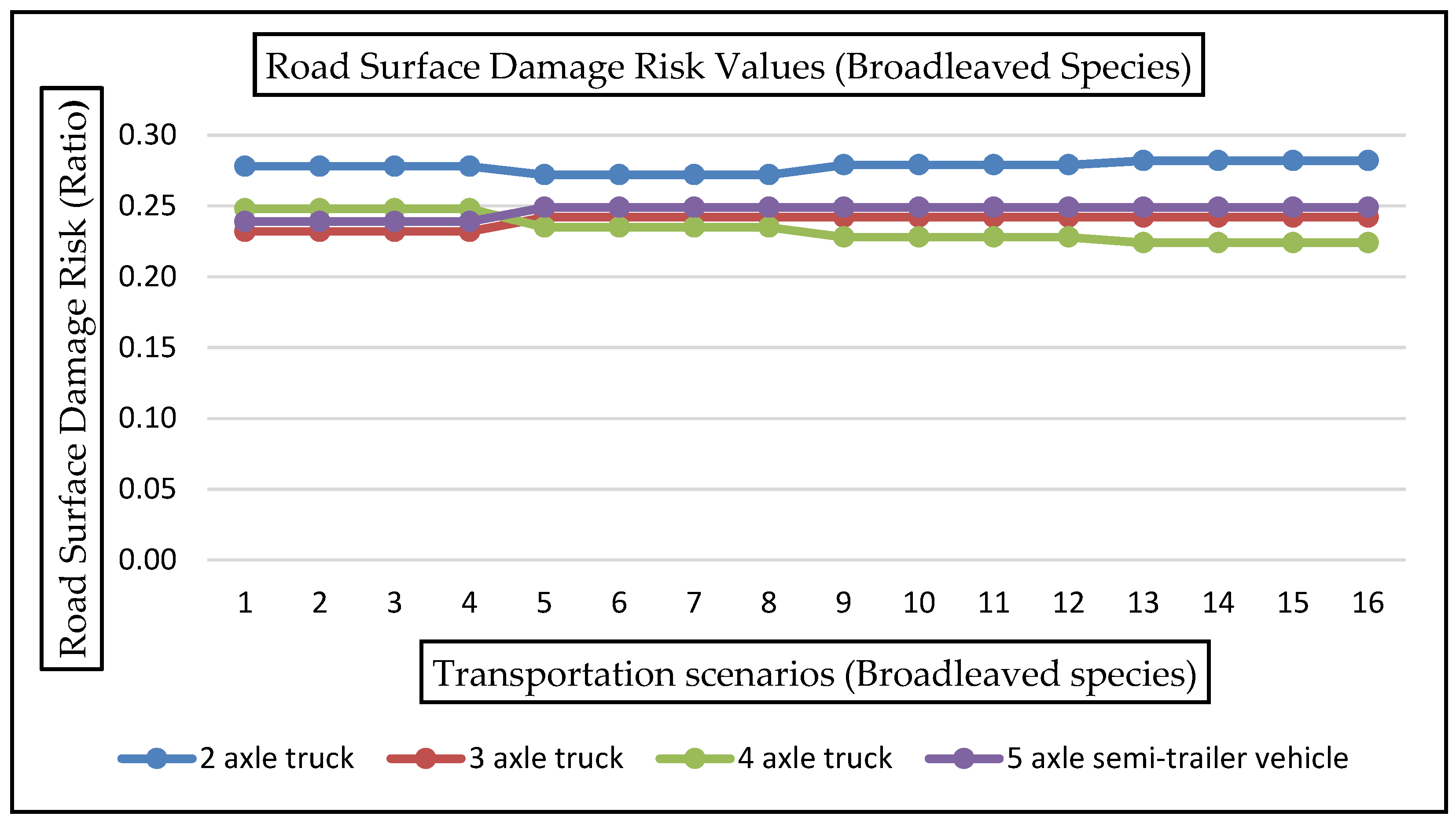
3.3. Creating Forest Product Transportation Scenarios and Determining the Most Suitable Vehicle Types in Terms of Environmental Damage
3.4. Results for Determining the Most Suitable Vehicle Types in Transportation Scenarios
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- El Hachemi, N.; Gendreau, M.; Rousseau, L.-M. Solving a Log-Truck Scheduling Problem with Constraint Programming. In Proceedings of the International Conference on Integration of Artificial Intelligence (AI) and Operations Research (OR) Techniques in Constraint Programming, Paris, France, 20–23 May 2008; Springer: Berlin/Heidelberg, Germany; pp. 293–297. [Google Scholar]
- Koirala, A.; Kizha, A.R.; Roth, B. Forest Trucking Industry in Maine: A Review on Challenges and Resolutions. In Proceedings of the 39th Annual Meeting of the Council on Forest Engineering, Vancouver, BC, Canada, 19–21 September 2016. [Google Scholar]
- Nurminen, T.; Heinonen, J. Characteristics and Time Consumption of Timber Trucking in Finland. Silva Fenn. 2007, 41, 471–487. [Google Scholar] [CrossRef] [Green Version]
- Sosa, A.; Klvac, R.; Coates, E.; Kent, T.; Devlin, G. Improving Log Loading Efficiency for Improved Sustainable Transport within the Irish Forest and Biomass Sectors. Sustainability 2015, 7, 3017–3030. [Google Scholar] [CrossRef] [Green Version]
- OECD. Biomass and Agriculture: Sustainability, Markets and Policies; Organisation for Economic Co-operation and Development: Paris, France, 2004. [Google Scholar]
- Weintraub, A.; Romero, C.; Bjørndal, T.; Epstein, R.; Miranda, J. Handbook of Operations Research in Natural Resources; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Devlin, G.; Sosa, A.; Acuna, M. Solving the Woody Supply Chain for Ireland’s Expanding Biomass Sector: A Case Study. In Biomass Supply Chains for Bioenergy and Biorefining; Elsevier: Amsterdam, The Netherlands, 2016; pp. 333–355. [Google Scholar]
- Hamsley, A.K.; Greene, W.D.; Siry, J.P.; Mendell, B.C. Improving Timber Trucking Performance by Reducing Variability of Log Truck Weights. South. J. Appl. For. 2007, 31, 12–16. [Google Scholar] [CrossRef] [Green Version]
- Mousavi, R. Comparison of Productivity, Cost and Environmental Impacts of Two Harvesting Methods in Northern Iran: Short-Log vs. Long-Log. Ph.D. Thesis, Faculty of Forest Sciences, University of Joensuu, Joensuu, Finland, 2009. [Google Scholar]
- Rönnqvist, M.; D’Amours, S.; Weintraub, A.; Jofre, A.; Gunn, E.; Haight, R.G.; Martell, D.; Murray, A.T.; Romero, C. Operations Research Challenges in Forestry: 33 Open Problems. Ann. Oper. Res. 2015, 232, 11–40. [Google Scholar] [CrossRef]
- Lautala, P.T.; Hilliard, M.R.; Webb, E.; Busch, I.; Hess, J.R.; Roni, M.S.; Hilbert, J.; Handler, R.M.; Bittencourt, R.; Valente, A. Opportunities and Challenges in the Design and Analysis of Biomass Supply Chains. Environ. Manag. 2015, 56, 1397–1415. [Google Scholar] [CrossRef]
- Svenson, G.; Fjeld, D. The Impact of Road Geometry and Surface Roughness on Fuel Consumption of Logging Trucks. Scand. J. For. Res. 2016, 31, 526–536. [Google Scholar] [CrossRef]
- Han, S.-K.; Murphy, G. Predicting Loaded On-Highway Travel Times of Trucks Hauling Woody Raw Material for Improved Forest Biomass Utilization in Oregon. West. J. Appl. For. 2012, 27, 92–99. [Google Scholar] [CrossRef]
- Mousavi, R.; Naghdi, R. Time Consumption and Productivity Analysis of Timber Trucking Using Two Kinds of Trucks in Northern Iran. J. For. Sci. 2013, 59, 211–221. [Google Scholar] [CrossRef] [Green Version]
- Manzone, M.; Balsari, P. The Energy Consumption and Economic Costs of Different Vehicles Used in Transporting Woodchips. Fuel 2015, 139, 511–515. [Google Scholar] [CrossRef]
- Manzone, M.; Calvo, A. Woodchip Transportation: Climatic and Congestion Influence on Productivity, Energy and CO2 Emission of Agricultural and Industrial Convoys. Renew. Energy 2017, 108, 250–259. [Google Scholar] [CrossRef]
- Trzciński, G.; Moskalik, T.; Wojtan, R. Total Weight and Axle Loads of Truck Units in the Transport of Timber Depending on the Timber Cargo. Forests 2018, 9, 164. [Google Scholar] [CrossRef] [Green Version]
- Achillas, C.; Moussiopoulos, N.; Karagiannidis, A.; Banias, G.; Perkoulidis, G. The Use of Multi-Criteria Decision Analysis to Tackle Waste Management Problems: A Literature Review. Waste Manag. Res. 2013, 31, 115–129. [Google Scholar] [CrossRef] [PubMed]
- Akay, A.O.; Demir, M.; Akgul, M. Assessment of Risk Factors in Forest Road Design and Construction Activities with Fuzzy Analytic Hierarchy Process Approach in Turkey. Environ. Monit. Assess. 2018, 190, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Saremi, M.; Mousavi, S.F.; Sanayei, A. TQM Consultant Selection in SMEs with TOPSIS under Fuzzy Environment. Expert Syst. Appl. 2009, 36, 2742–2749. [Google Scholar] [CrossRef]
- Karakasoglu, N. Fuzzy Multi-Criteria Decision Making Methods and Application. Master’s Thesis, Pamukkale University Graduate School of Social Sciences, Denizli, Turkey, 2008. (In Turkish). [Google Scholar]
- GDF General Directorate of Forestry Istanbul Regional Directorate of Forestry Wood Raw Material Harvesting Amounts. Available online: https://www.ogm.gov.tr/ekutuphane/UretimSatisveStokFaaliyetleri/Forms/AllItems.aspx (accessed on 30 October 2020).
- Sosa, A.; McDonnell, K.; Devlin, G. Analysing Performance Characteristics of Biomass Haulage in Ireland for Bioenergy Markets with GPS, GIS and Fuel Diagnostic Tools. Energies 2015, 8, 12004–12019. [Google Scholar] [CrossRef]
- Sikanen, L.; Asikainen, A.; Lehikoinen, M. Transport Control of Forest Fuels by Fleet Manager, Mobile Terminals and GPS. Biomass Bioenergy 2005, 28, 183–191. [Google Scholar] [CrossRef]
- Devlin, G.J.; McDonnell, K.; Ward, S. Timber Haulage Routing in Ireland: An Analysis Using GIS and GPS. J. Transp. Geogr. 2008, 16, 63–72. [Google Scholar] [CrossRef] [Green Version]
- Holzleitner, F.; Kanzian, C.; Stampfer, K. Analyzing Time and Fuel Consumption in Road Transport of Round Wood with an Onboard Fleet Manager. Eur. J. For. Res. 2011, 130, 293–301. [Google Scholar] [CrossRef]
- Conrad, I.; Joseph, L. Would Weight Parity on Interstate Highways Improve Safety and Efficiency of Timber Transportation in the US South? Int. J. For. Eng. 2020, 31, 242–252. [Google Scholar] [CrossRef]
- Conrad, J.L. Evaluating Profitability of Individual Timber Deliveries in the US South. Forests 2021, 12, 437. [Google Scholar] [CrossRef]
- Pandur, Z.; Nevečerel, H.; Šušnjar, M.; Bačić, M.; Lepoglavec, K. Energy Efficiency of Timber Transport by Trucks on Hilly and Mountainous Forest Roads. Forestist 2022, 72, 20–28. [Google Scholar] [CrossRef]
- Seyir Vehicle Tracking and Fleet Management System. Available online: http://web.seyirmobil.com/ (accessed on 10 July 2019).
- Boulton, S.J.; Stokes, M. Which DEM Is Best for Analyzing Fluvial Landscape Development in Mountainous Terrains? Geomorphology 2018, 310, 168–187. [Google Scholar] [CrossRef]
- Esin, A.İ.; Akgul, M.; Akay, A.O.; Yurtseven, H. Comparison of LiDAR-Based Morphometric Analysis of a Drainage Basin with Results Obtained from UAV, TOPO, ASTER and SRTM-Based DEMs. Arab. J. Geosci. 2021, 14, 340. [Google Scholar] [CrossRef]
- Gülci, S.; Akgül, M.; Gülci, N.; Demir, M. Orman Yolu Güzergahlarının Belirlenmesinde Farklı Tekniklerle Üretilmiş Sayısal Arazi Modellerinin Kullanılması Üzerine Bir Araştırma (A Study on Using Digital Terrain Models Produced by Different Techniques in Determining Forest Road Routes). J. Bartin Fac. For. 2021, 23, 654–667. (In Turkish) [Google Scholar] [CrossRef]
- Mondal, A.; Khare, D.; Kundu, S. Uncertainty Analysis of Soil Erosion Modelling Using Different Resolution of Open-Source DEMs. Geocarto Int. 2017, 32, 334–349. [Google Scholar] [CrossRef]
- Saaty, T.L. The Analytic Hierarchy Process Mcgraw Hill, New York. Agric. Econ. Rev. 1980, 70, 324. [Google Scholar]
- Bender, M.J.; Simonovic, S.P. A Fuzzy Compromise Approach to Water Resource Systems Planning under Uncertainty. Fuzzy Sets Syst. 2000, 115, 35–44. [Google Scholar] [CrossRef]
- Zhu, K.-J.; Jing, Y.; Chang, D.-Y. A Discussion on Extent Analysis Method and Applications of Fuzzy AHP. Eur. J. Oper. Res. 1999, 116, 450–456. [Google Scholar] [CrossRef]
- Van Laarhoven, P.J.; Pedrycz, W. A Fuzzy Extension of Saaty’s Priority Theory. Fuzzy Sets Syst. 1983, 11, 229–241. [Google Scholar] [CrossRef]
- Buckley, J.J. Fuzzy Hierarchical Analysis. Fuzzy Sets Syst. 1985, 17, 233–247. [Google Scholar] [CrossRef]
- Chang, D.-Y. Applications of the Extent Analysis Method on Fuzzy AHP. Eur. J. Oper. Res. 1996, 95, 649–655. [Google Scholar] [CrossRef]
- Hwang, C.-L.; Yoon, K. Methods for Multiple Attribute Decision Making. In Multiple Attribute Decision Making; Springer: Berlin/Heidelberg, Germany, 1981; pp. 58–191. [Google Scholar]
- Cheng, S.; Chan, C.W.; Huang, G.H. Using Multiple Criteria Decision Analysis for Supporting Decisions of Solid Waste Management. J. Environ. Sci. Health Part A 2002, 37, 975–990. [Google Scholar] [CrossRef] [PubMed]
- Janic, M. Multicriteria Evaluation of High-Speed Rail, Transrapid Maglev and Air Passenger Transport in Europe. Transp. Plan. Technol. 2003, 26, 491–512. [Google Scholar] [CrossRef]
- Jahanshahloo, G.R.; Lotfi, F.H.; Izadikhah, M. An Algorithmic Method to Extend TOPSIS for Decision-Making Problems with Interval Data. Appl. Math. Comput. 2006, 175, 1375–1384. [Google Scholar] [CrossRef]
- Kwong, C.-K.; Bai, H. Determining the Importance Weights for the Customer Requirements in QFD Using a Fuzzy AHP with an Extent Analysis Approach. IIE Trans. 2003, 35, 619–626. [Google Scholar] [CrossRef]
- Jang, J.-S. ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Jang, J.-S.R.; Sun, C.-T.; Mizutani, E. Neuro-Fuzzy and Soft Computing-a Computational Approach to Learning and Machine Intelligence [Book Review]. IEEE Trans. Autom. Control 1997, 42, 1482–1484. [Google Scholar] [CrossRef]
- Kim, J.; Kasabov, N. HyFIS: Adaptive Neuro-Fuzzy Inference Systems and Their Application to Nonlinear Dynamical Systems. Neural Netw. 1999, 12, 1301–1319. [Google Scholar] [CrossRef]
- Saravanan, S.; Kannan, S.; Thangaraj, C. Prediction of India’s Electricity Demand Using Anfis. ICTACT J. Soft Comput. 2015, 5, 985–990. [Google Scholar]
- Bozkurt, A.Y.; Erdin, N. Ağaç Malzeme Teknolojisi (Wood Technology); Istanbul University Press: Istanbul, Turkey, 2011. (In Turkish) [Google Scholar]
- Houghton, J.T.; Meira Filho, L.G.; Lim, B.; Treanton, K.; Mamaty, I.; Bonduki, Y.; Griggs, D.J.; Callender, B.A. (Eds.) IPCC/UNEP/OECD/IEA Revised 1996 IPCC Guidelines for National Greenhouse Gas Inventories Volume III: Reference Manual; Intergovernmental Panel on Climate Change, United Nations Environment Programme, Organization for Economic CoOperation and Development, International Energy Agency: Paris, France, 1997; Chapter 1; pp. 4–44, 62–98. [Google Scholar]
- Palander, T.; Haavikko, H.; Kortelainen, E.; Kärhä, K.; Borz, S.A. Improving Environmental and Energy Efficiency in Wood Transportation for a Carbon-Neutral Forest Industry. Forests 2020, 11, 1194. [Google Scholar] [CrossRef]
- Tymendorf, L.; Trzciński, G. Multi-Factorial Load Analysis of Pine Sawlogs in Transport to Sawmill. Forests 2020, 11, 366. [Google Scholar] [CrossRef] [Green Version]
- Sosa, A.; Acuna, M.; McDonnell, K.; Devlin, G. Controlling Moisture Content and Truck Configurations to Model and Optimise Biomass Supply Chain Logistics in Ireland. Appl. Energy 2015, 137, 338–351. [Google Scholar] [CrossRef] [Green Version]
- Murphy, G.; Kent, T.; Kofman, P.D. Modeling Air Drying of Sitka Spruce (Picea Sitchensis) Biomass in off-Forest Storage Yards in Ireland. For. Prod. J. 2012, 62, 443–449. [Google Scholar] [CrossRef]
- Klvač, R.; Kolařík, J.; Volná, M.; Drápela, K. Fuel Consumption in Timber Haulage. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2013, 34, 229–240. [Google Scholar]
- Liimatainen, H.; Pöllänen, M.; Nykänen, L. Impacts of Increasing Maximum Truck Weight—Case Finland. Eur. Transp. Res. Rev. 2020, 12, 14. [Google Scholar] [CrossRef] [Green Version]
- Palander, T. The Environmental Emission Efficiency of Larger and Heavier Vehicles—A Case Study of Road Transportation in Finnish Forest Industry. J. Clean. Prod. 2017, 155, 57–62. [Google Scholar] [CrossRef]
- Busenius, M.; Engler, B.; Smaltschinski, T.; Opferkuch, M. Consequences of Increasing Payloads on Carbon Emissions–an Example from the Bavaria State Forest Enterprise (BaySF). For. Lett. 2015, 108, 7–14. [Google Scholar]
- Kanzian, C.; Kühmaier, M.; Erber, G. Effects of Moisture Content on Supply Costs and CO2 Emissions for an Optimized Energy Wood Supply Network. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2016, 37, 51–60. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coniferous Tree Group | Timber Harvesting (m3) | Broadleaved Tree Group | Timber Harvesting (m3) |
|---|---|---|---|
| Cedrussp. (Cedar) | 0 | Quercussp. (Oak) | 578,931 |
| Juniperus(Juniper) | 0 | Carpinussp.(Hornbeam) | 12,600 |
| Pinus brutiaTen. (Red pine) | 30,572 | Fagussp.(Beech) | 318,674 |
| Pinus sylvestrisL. (Scotch pine) | 109 | Populussp.(Poplar) | 10,296 |
| Pinus nigraL. (Black pine) | 81,181 | Alnussp.(Alder) | 1453 |
| Piceasp. (Spruce) | 0 | Other broadleaved | 81,926 |
| Abiessp. (Fir) | 0 | Total (broadleaved) | 1,003,880 |
| Other coniferous | 161,975 | ||
| Total (coniferous) | 273,837 | ||
| General total (m3) (coniferous + broadleaved) | 1,277,717 | ||
| Demographic Characteristics | Occupational Status of the Surveyor Evaluators | |||||
|---|---|---|---|---|---|---|
| Expert academicians (22 male; 1 female) | Forest engineer (6 male; 2 female) | Forest products transportation authorized (Persons involved in logistics) (2 male) | ||||
| Age | 20–40 | 11 persons | 30–40 | 2 persons | 30–40 | 2 persons |
| 40–60 | 11 persons | 40–50 | 6 persons | |||
| >60 | 1 person | |||||
| Occupational experience (year) | 3–10 | 6 persons | 0–10 | 2 persons | 10–15 | 2 persons |
| 10–20 | 10 persons | 10–30 | 5 persons | |||
| 20–40 | 7 persons | >30 | 1 person | |||
| Linguistic Variables | Triangular Fuzzy Numbers | Reciprocal Triangular Fuzzy Numbers |
|---|---|---|
| Just equal | 1, 1, 1 | 1, 1, 1 |
| Equally important | 1/2, 1, 3/2 | 2/3, 1, 2 |
| Weakly more important | 1, 3/2, 2 | 1/2, 2/3, 1 |
| Strongly more important | 3/2, 2, 5/2 | 2/5, 1/2, 2/3 |
| Very strongly more important | 2, 5/2, 3 | 1/3, 2/5, 1/2 |
| Absolutely more important | 5/2, 3, 7/2 | 2/7, 1/3, 2/5 |
| Main Criteria | Cost | Environmental Damage | Operational Performance | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Cost | 1 | 1 | 1 | 0.74 | 0.96 | 1.25 | 0.83 | 1.07 | 1.33 |
| Environmental damage | 0.8 | 1.04 | 1.35 | 1 | 1 | 1 | 1.05 | 1.32 | 1.64 |
| Operational performance | 0.75 | 0.93 | 1.20 | 0.60 | 0.75 | 0.95 | 1 | 1 | 1 |
| Main Criteria | Cost | Environmental Damage | Operational Performance |
|---|---|---|---|
| Cost | 1 | 0.97 | 1.07 |
| Environmental damage | 1.05 | 1 | 1.32 |
| Operational performance | 0.94 | 0.76 | 1 |
| Decision Alternatives | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Random value index | 0.00 | 0.00 | 0.58 | 0.90 | 1.12 | 1.24 | 1.32 | 1.41 | 1.45 | 1.49 |
| Main Criteria | Weight | Sub-Criteria | Weight | Global Weight |
|---|---|---|---|---|
| Cost | 0.3371 | Fixed cost | 0.1671 | 0.0563 |
| Variable cost | 0.3571 | 0.1203 | ||
| Unit cost | 0.4757 | 0.1603 | ||
| Environmental damage | 0.4004 | CO2 emission | 0.5050 | 0.2022 |
| Road surface damage risk | 0.4950 | 0.1981 | ||
| Operational performance | 0.2624 | Arrival time | 0.2331 | 0.0611 |
| Fuel consumption | 0.3543 | 0.0929 | ||
| Payload | 0.4125 | 0.1082 |
| Training Data: 193 Test Data: 83 | |
|---|---|
| Input Variables | Output Variable |
| Transportation distance (km) | Fuel consumption (L) |
| Vehicle tare weight (kg) + forest product weight (kg) | |
| Mean road uphill longitudinal gradient (%) | |
| Mean road downhill longitudinal gradient (%) | |
| Maximum vehicle speed (km/h) | |
| Input Variables | Minimum | Maximum | Mean |
|---|---|---|---|
| Transportation distance (km) | 85 | 571.2 | 290.08 |
| Vehicle tare weight (kg) + forest product weight (kg) | 35,850 | 68,100 | 47,883.04 |
| Mean road uphill longitudinal gradient (%) | 3.58 | 6.98 | 4.81 |
| Mean road downhill longitudinal gradient (%) | 3.47 | 6.92 | 4.71 |
| Maximum vehicle speed (km/h) | 71 | 116 | 95.89 |
| Fuel Consumption Prediction Model (2 2 2 2 2) | |||
|---|---|---|---|
| Membership Function Type (mf) | Training Data Error Value (RMSE) | Test Data Error Value (RMSE) | |
| Triangle membership function | trimf | 0.037588 | 0.053792 |
| Trapezoid membership function | trapmf | 0.038039 | 0.048372 |
| Bell shaped membership function | gbellmf | 0.035936 | 0.049264 |
| Gauss membership function (fully symmetrical) | gaussmf | 0.036189 | 0.051989 |
| Gauss membership function | gauss2mf | 0.036281 | 0.050497 |
| Pi membership function | pimf | 0.038436 | 0.055337 |
| Sigmoid membership function (fully symmetrical) | dsigmf | 0.037497 | 0.058358 |
| Sigmoid membership function | psigmf | 0.037497 | 0.058358 |
| Fuel Consumption Prediction Model | Training Data | Test Data |
|---|---|---|
| MSE | 105.66 | 174.33 |
| RMSE | 10.27 | 13.20 |
| MAPE | 6.4% | 8.3% |
| R2 | 0.95 | 0.91 |
| Coniferous Tree Species | Oven Dry Density (g/cm3) | Density Value (g/cm3) | Density Value (kg/m3) | Broadleaved Tree Species | Oven Dry Density (g/cm3) | Density Value (g/cm3) | Density Value (kg/m3) |
|---|---|---|---|---|---|---|---|
| Red pine | 0.53 | 0.461 | 461 | Oriental beech | 0.59 | 0.506 | 506 |
| Black pine | 0.52 | 0.453 | 453 | Pedunculate oak /Sessile oak | 0.65 | 0.549 | 549 |
| Mean | 457 | Mean | 527.5 |
| Tree Group | Density Value (kg/m3) | Included Moisture Density Value (kg/m3) | Tree Group | Density Value (kg/m3) | Included Moisture Density Value (kg/m3) |
|---|---|---|---|---|---|
| Coniferous species (Mean) | 457 | 616.95 | Broadleaved species (Mean) | 527.5 | 986.42 |
| SCENARIO NO (CONIFEROUS SPECIES) | Forest Product Tree Group | Forest Product Amount (m3-kg) | Transportation Distance (km) | Mean Road Uphill-Downhill Longitudinal Grade (%) | Maximum Vehicle Speed (km/h) |
|---|---|---|---|---|---|
| 1 | CONIFEROSUS SPECIES (Moisture included density- 616.95 kg/m3) | 50 m3 (30,847.50 kg) | 150 | 4-4 | 90 |
| 2 | 200 | 4-4 | 90 | ||
| 3 | 250 | 4-4 | 90 | ||
| 4 | 300 | 4-4 | 90 | ||
| 5 | 100 m3 (61,695 kg) | 150 | 4-4 | 90 | |
| 6 | 200 | 4-4 | 90 | ||
| 7 | 250 | 4-4 | 90 | ||
| 8 | 300 | 4-4 | 90 | ||
| 9 | 150 m3 (92,542.50 kg) | 150 | 4-4 | 90 | |
| 10 | 200 | 4-4 | 90 | ||
| 11 | 250 | 4-4 | 90 | ||
| 12 | 300 | 4-4 | 90 | ||
| 13 | 200 m3 (123,390 kg) | 150 | 4-4 | 90 | |
| 14 | 200 | 4-4 | 90 | ||
| 15 | 250 | 4-4 | 90 | ||
| 16 | 300 | 4-4 | 90 | ||
| SCENARIO NO (BROADLEAVED SPECIES) | Forest Product Tree Group | Forest Product Amount (m3-kg) | Transportation Distance (km) | Mean Road Uphill-Downhill Longitudinal Grade (%) | Maximum Vehicle Speed (km/h) |
| 1 | BROADLEAVED SPECIES (Moisture included density- 986.42 kg/m3) | 50 m3 (49,321.25 kg) | 150 | 4-4 | 90 |
| 2 | 200 | 4-4 | 90 | ||
| 3 | 250 | 4-4 | 90 | ||
| 4 | 300 | 4-4 | 90 | ||
| 5 | 100 m3 (98,642.5 kg) | 150 | 4-4 | 90 | |
| 6 | 200 | 4-4 | 90 | ||
| 7 | 250 | 4-4 | 90 | ||
| 8 | 300 | 4-4 | 90 | ||
| 9 | 150 m3 (147,963.75 kg) | 150 | 4-4 | 90 | |
| 10 | 200 | 4-4 | 90 | ||
| 11 | 250 | 4-4 | 90 | ||
| 12 | 300 | 4-4 | 90 | ||
| 13 | 200 m3 (197,285 kg) | 150 | 4-4 | 90 | |
| 14 | 200 | 4-4 | 90 | ||
| 15 | 250 | 4-4 | 90 | ||
| 16 | 300 | 4-4 | 90 |
| 2-Axle Trucks (Maximum Legal Load Weight: 18 ton) | Payload (kg) | Tare Weight (kg) |
|---|---|---|
| BMC truck Tgr 1829 | 11,302 | 6698 |
| FORD truck1842 | 10,380 | 7620 |
| FORD truck1833 Dc | 10,950 | 7050 |
| Mean | 10,877 | 7122.66 |
| 3-axle trucks (Maximum legal load weight: 25 ton) | Payload (kg) | Tare weight (kg) |
| BMC truck Tgr 2532 | 16,850 | 8150 |
| FORD truck 2542 Hr | 15,775 | 9225 |
| FORD truck 2533 Hr | 17,056 | 7944 |
| FORD truck 2642 Hr | 16,870 | 9130 |
| MERCEDES truck 26232 | 16,650 | 8350 |
| Mean | 16,640.2 | 8559.8 |
| 4-axle trucks (Maximum legal load weight: 32 ton) | Payload (kg) | Tare weight (kg) |
| BMC truck Tgr 3232 | 22,445 | 9555 |
| FORD truck 3233S Hr | 22,195 | 9805 |
| MERCEDES truck Actros 3232 L | 22,500 | 9500 |
| MERCEDES truck Actros 3242 L | 21,950 | 10,050 |
| Mean | 22,272.5 | 9727.5 |
| 2-Axle Trucks | Payload (kg) | Tare Weight (kg) |
|---|---|---|
| BMC truck 1846 4 × 2 | - | 7678 |
| FORD truck FMAX 4 × 2 | - | 7553 |
| FORD truck 1848T 4 × 2 | - | 7666 |
| MERCEDES Actros truck 1842 4 × 2 | - | 7635 |
| MERCEDES Actros truck 1845 LS 4 × 2 | - | 8050 |
| Mean | - | 7716.4 |
| 3-axle trailer | Payload (kg) | Tare weight (kg) |
| Mean 3-axle semi-trailer | 26,433.6 | 5850 |
| Total 5-axle semi-trailer vehicle (Maximum legal load weight: 40 ton) | 26,433.6 | 13,566.4 |
| SCENARIO NO (CONIFEROUS SPECIES) | VEHICLE ALTERNATIVES | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2-Axle Truck Payload (10,877 kg) | 3-Axle Truck Payload (16,440.2 kg) | 4-Axle Truck Payload (22,272.5 kg) | 5-Axle Semi-Trailer Vehicle Payload (26,433.6 kg) | |||||||||
| Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | Required Vehicle Number (fleet) | Fuel Consumption (L) | CO2 Emission (kg) | Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | |
| (gross+ tare) | (gross + tare) | (gross + tare) | (gross + tare) | |||||||||
| 1 | 3 | 254.92 | 696.54 | 2 | 177.03 | 483.74 | 2 | 179.18 | 489.61 | 2 | 184.59 | 504.38 |
| 2 | 3 | 333.15 | 910.31 | 2 | 228.36 | 623.97 | 2 | 230.25 | 629.15 | 2 | 235.03 | 642.20 |
| 3 | 3 | 502.93 | 1374.22 | 2 | 339.75 | 928.350 | 2 | 341.10 | 932.04 | 2 | 344.51 | 941.36 |
| 4 | 3 | 678.56 | 1854.11 | 2 | 454.98 | 1243.21 | 2 | 455.77 | 1245.37 | 2 | 457.77 | 1250.81 |
| 5 | 6 | 510.50 | 1394.89 | 4 | 354.84 | 969.593 | 3 | 278.01 | 759.659 | 3 | 286.72 | 783.44 |
| 6 | 6 | 666.86 | 1822.15 | 4 | 457.40 | 1249.80 | 3 | 353.54 | 966.036 | 3 | 361.23 | 987.05 |
| 7 | 6 | 1006.27 | 2749.54 | 4 | 679.998 | 1858.03 | 3 | 517.48 | 1413.98 | 3 | 522.97 | 1428.98 |
| 8 | 6 | 1357.36 | 3708.87 | 4 | 910.260 | 2487.20 | 3 | 687.07 | 1877.36 | 3 | 690.28 | 1886.13 |
| 9 | 9 | 766.06 | 2093.20 | 6 | 532.10 | 1453.93 | 5 | 459.71 | 1256.11 | 4 | 388.65 | 1061.95 |
| 10 | 9 | 1000.58 | 2733.99 | 6 | 685.955 | 1874.30 | 5 | 586.01 | 1601.24 | 4 | 487.26 | 1331.40 |
| 11 | 9 | 1509.60 | 4124.86 | 6 | 1019.89 | 2786.75 | 5 | 860.17 | 2350.35 | 4 | 701.30 | 1916.25 |
| 12 | 9 | 2036.16 | 5563.62 | 6 | 1365.32 | 3730.63 | 5 | 1143.77 | 3125.26 | 4 | 922.71 | 2521.24 |
| 13 | 12 | 1021.63 | 2791.51 | 8 | 709.386 | 1938.33 | 6 | 556.47 | 1520.52 | 5 | 490.94 | 1341.44 |
| 14 | 12 | 1334.29 | 3645.83 | 8 | 914.528 | 2498.86 | 6 | 707.48 | 1933.13 | 5 | 613.60 | 1676.62 |
| 15 | 12 | 2012.94 | 5500.18 | 8 | 1359.79 | 3715.52 | 6 | 1035.25 | 2828.73 | 5 | 879.86 | 2404.14 |
| 16 | 12 | 2714.96 | 7418.38 | 8 | 1820.40 | 4974.08 | 6 | 1374.31 | 3755.17 | 5 | 1155.28 | 3156.71 |
| SCENARIO NO (BROADLEAVED SPECIES) | VEHICLE ALTERNATIVES | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2-Axle Truck Payload (10,877 kg) | 3-Axle Truck Payload (16,440.2 kg) | 4-Axle Truck Payload (22,272.5 kg) | 5-Axle Semi-Trailer Vehicle Payload (26,433.6 kg) | |||||||||
| Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | Required Vehicle Number (Fleet) | Fuel Consumption (L) | CO2 Emission (kg) | |
| (gross + tare) | (gross + tare) | (gross + tare) | (gross + tare) | |||||||||
| 1 | 5 | 425.3 | 1162.09 | 3 | 267.78 | 731.69 | 3 | 272.13 | 743.58 | 2 | 196.27 | 536.30 |
| 2 | 5 | 555.63 | 1518.20 | 3 | 344.50 | 941.33 | 3 | 348.34 | 951.83 | 2 | 245.35 | 670.41 |
| 3 | 5 | 838.49 | 2291.10 | 3 | 511.03 | 1396.35 | 3 | 513.77 | 1403.85 | 2 | 351.88 | 961.48 |
| 4 | 5 | 1131.09 | 3090.62 | 3 | 683.30 | 1867.05 | 3 | 684.90 | 1871.44 | 2 | 462.07 | 1262.58 |
| 5 | 9 | 766.69 | 2094.93 | 6 | 535.56 | 1463.38 | 5 | 461.20 | 1260.19 | 4 | 392.65 | 1072.89 |
| 6 | 9 | 1001.14 | 2735.52 | 6 | 689.01 | 1882.66 | 5 | 587.33 | 1604.84 | 4 | 490.80 | 1341.06 |
| 7 | 9 | 1510.00 | 4125.94 | 6 | 1022.07 | 2792.71 | 5 | 861.11 | 2352.92 | 4 | 703.83 | 1923.15 |
| 8 | 9 | 2036.39 | 5564.26 | 6 | 1366.60 | 3734.11 | 5 | 1144.3 | 3126.76 | 4 | 924.19 | 2525.27 |
| 9 | 14 | 1192.01 | 3257.06 | 9 | 803.35 | 2195.08 | 7 | 651.47 | 1780.10 | 6 | 589.13 | 1609.74 |
| 10 | 14 | 1556.77 | 4253.73 | 9 | 1033.51 | 2823.99 | 7 | 827.39 | 2260.76 | 6 | 736.33 | 2011.95 |
| 11 | 14 | 2348.50 | 6417.05 | 9 | 1533.11 | 4189.07 | 7 | 1209.2 | 3304.07 | 6 | 1055.8 | 2884.97 |
| 12 | 14 | 3167.49 | 8654.88 | 9 | 2049.90 | 5601.17 | 7 | 1604.1 | 4383.31 | 6 | 1386.3 | 3788.06 |
| 13 | 19 | 1617.95 | 4420.90 | 12 | 1071.13 | 2926.77 | 9 | 842.00 | 2300.69 | 8 | 785.69 | 2146.84 |
| 14 | 19 | 2112.96 | 5773.47 | 12 | 1378.02 | 3765.32 | 9 | 1067.66 | 2917.29 | 8 | 981.94 | 2683.06 |
| 15 | 19 | 3187.39 | 8709.26 | 12 | 2044.14 | 5585.43 | 9 | 1557.47 | 4255.65 | 8 | 1407.90 | 3846.96 |
| 16 | 19 | 4298.82 | 11,746.10 | 12 | 2733.20 | 7468.23 | 9 | 2064.15 | 5640.10 | 8 | 1848.53 | 5050.94 |
| SCENARIO NO (CONIFEROUS SPECIES) | VEHICLE ALTERNATIVES | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2-Axle Truck Payload (10.877 kg) | 3-Axle Truck Payload (16.440,2 kg) | 4-Axle Truck Payload (22.272,5 kg) | 5-Axle Semi-Trailer Vehicle Payload (26.433,6 kg) | |||||||||
| Required Vehicle Number (Fleet) | Gross+tare Weight (kg) | Road Surface Damage Risk (Ratio) | Required Vehicle Number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | Required Vehicle Number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | Required Vehicle Number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | |
| 1 | 3 | 73,584.14 | 0.250 | 2 | 65,086.7 | 0.221 | 2 | 69,757.5 | 0.237 | 2 | 85,112.3 | 0.289 |
| 2 | 3 | 73,584.14 | 0.250 | 2 | 65,086.7 | 0.221 | 2 | 69,757.5 | 0.237 | 2 | 85,112.3 | 0.289 |
| 3 | 3 | 73,584.14 | 0.250 | 2 | 65,086.7 | 0.221 | 2 | 69,757.5 | 0.237 | 2 | 85,112.3 | 0.289 |
| 4 | 3 | 73,584.14 | 0.250 | 2 | 65,086.7 | 0.221 | 2 | 69,757.5 | 0.237 | 2 | 85,112.3 | 0.289 |
| 5 | 6 | 147,168.62 | 0.272 | 4 | 130,173.4 | 0.240 | 3 | 120,060 | 0.222 | 3 | 143,092.2 | 0.264 |
| 6 | 6 | 147,168.62 | 0.272 | 4 | 130,173.4 | 0.240 | 3 | 120,060 | 0.222 | 3 | 143,092.2 | 0.264 |
| 7 | 6 | 147,168.62 | 0.272 | 4 | 130,173.4 | 0.240 | 3 | 120,060 | 0.222 | 3 | 143,092.2 | 0.264 |
| 8 | 6 | 147,168.62 | 0.272 | 4 | 130,173.4 | 0.240 | 3 | 120,060 | 0.222 | 3 | 143,092.2 | 0.264 |
| 9 | 9 | 220,753.10 | 0.273 | 6 | 195,260.1 | 0.241 | 5 | 189,817.5 | 0.235 | 4 | 201,072,1 | 0.249 |
| 10 | 9 | 220,753.10 | 0.273 | 6 | 195,260.1 | 0.241 | 5 | 189,817.5 | 0.235 | 4 | 201,072,1 | 0.249 |
| 11 | 9 | 220,753.10 | 0.273 | 6 | 195,260.1 | 0.241 | 5 | 189,817.5 | 0.235 | 4 | 201,072,1 | 0.249 |
| 12 | 9 | 220,753.10 | 0.273 | 6 | 195,260.1 | 0.241 | 5 | 189,817.5 | 0.235 | 4 | 201,072,1 | 0.249 |
| 13 | 12 | 294,337.58 | 0.279 | 8 | 260,346.8 | 0.247 | 6 | 240,120 | 0.227 | 5 | 259,052 | 0.245 |
| 14 | 12 | 294,337.58 | 0.279 | 8 | 260,346.8 | 0.247 | 6 | 240,120 | 0.227 | 5 | 259,052 | 0.245 |
| 15 | 12 | 294,337.58 | 0.279 | 8 | 260,346.8 | 0.247 | 6 | 240,120 | 0.227 | 5 | 259,052 | 0.245 |
| 16 | 12 | 294,337.58 | 0.279 | 8 | 260,346.8 | 0.247 | 6 | 240,120 | 0.227 | 5 | 259,052 | 0.245 |
| SCENARIO NO (BROADLEAVED SPECIES) | VEHICLE ALTERNATIVES | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2-Axle Truck Payload (10,877 kg) | 3-Axle Truck Payload (16,440.2 kg) | 4-Axle Truck Payload (22,272.5 kg) | 5-Axle Semi-Trailer Vehicle Payload (26,433.6 kg) | |||||||||
| Required Vehicle Number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | Required Vehicle Number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | Required Vehicle Number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | Required vehicle number (Fleet) | Gross+Tare Weight (kg) | Road Surface Damage Risk (Ratio) | |
| 1 | 5 | 120,549.21 | 0.278 | 3 | 100,679.4 | 0.232 | 2 | 107,686.25 | 0.248 | 2 | 103,586.05 | 0.239 |
| 2 | 5 | 120,549.21 | 0.278 | 3 | 100,679.4 | 0.232 | 2 | 107,686.25 | 0.248 | 2 | 103,586.05 | 0.239 |
| 3 | 5 | 120,549.21 | 0.278 | 3 | 100,679.4 | 0.232 | 2 | 107,686.25 | 0.248 | 2 | 103,586.05 | 0.239 |
| 4 | 5 | 120,549.21 | 0.278 | 3 | 100,679.4 | 0.232 | 2 | 107,686.25 | 0.248 | 2 | 103,586.05 | 0.239 |
| 5 | 9 | 226,103.94 | 0.272 | 6 | 201,358.8 | 0.242 | 5 | 195,917.5 | 0.235 | 4 | 207,172.1 | 0.249 |
| 6 | 9 | 226,103.94 | 0.272 | 6 | 201,358.8 | 0.242 | 5 | 195,917.5 | 0.235 | 4 | 207,172.1 | 0.249 |
| 7 | 9 | 226,103.94 | 0.272 | 6 | 201,358.8 | 0.242 | 5 | 195,917.5 | 0.235 | 4 | 207,172.1 | 0.249 |
| 8 | 9 | 226,103.94 | 0.272 | 6 | 201,358.8 | 0.242 | 5 | 195,917.5 | 0.235 | 4 | 207,172.1 | 0.249 |
| 9 | 14 | 347,402.65 | 0.279 | 9 | 302,038.2 | 0.242 | 7 | 284,148.75 | 0.228 | 6 | 310,758.15 | 0.249 |
| 10 | 14 | 347,402.65 | 0.279 | 9 | 302,038.2 | 0.242 | 7 | 284,148.75 | 0.228 | 6 | 310,758.15 | 0.249 |
| 11 | 14 | 347,402.65 | 0.279 | 9 | 302,038.2 | 0.242 | 7 | 284,148.75 | 0.228 | 6 | 310,758,15 | 0.249 |
| 12 | 14 | 347,402.65 | 0.279 | 9 | 302,038.2 | 0.242 | 7 | 284,148.75 | 0.228 | 6 | 310,758.15 | 0.249 |
| 13 | 19 | 467,952.20 | 0.282 | 12 | 402,717.6 | 0.242 | 9 | 372,380 | 0.224 | 8 | 414,344.2 | 0.249 |
| 14 | 19 | 467,952.20 | 0.282 | 12 | 402,717.6 | 0.242 | 9 | 372,380 | 0.224 | 8 | 414,344.2 | 0.249 |
| 15 | 19 | 467,952.20 | 0.282 | 12 | 402,717.6 | 0.242 | 9 | 372,380 | 0.224 | 8 | 414,344,2 | 0.249 |
| 16 | 19 | 467,952.20 | 0.282 | 12 | 402,717.6 | 0.242 | 9 | 372,380 | 0.224 | 8 | 414,344.2 | 0.249 |
| Input Matrix for TOPSIS Method. | ||
|---|---|---|
| Vehicle Alternatives | CO2 Emission (kg) | Road Surface Damage Risk (Ratio) |
| 2-axle truck | 696.54 | 0.25 |
| 3-axle truck | 483.74 | 0.221 |
| 4-axle truck | 489,61 | 0.237 |
| 5-axle semi-trailer | 504.38 | 0.289 |
| Normalized decision matrix | ||
| Vehicle Alternatives | ||
| 2-axle truck | 0.6323 | 0.4989 |
| 3-axle truck | 0.4391 | 0.4410 |
| 4-axle truck | 0.4444 | 0.4730 |
| 5-axle semi-trailer | 0.4579 | 0.5768 |
| Weighted normalized decision matrix | ||
| Vehicle Alternatives | ||
| 2-axle truck | 0.3193 | 0.2469 |
| 3-axle truck | 0.2217 | 0.2183 |
| 4-axle truck | 0.2244 | 0.2341 |
| 5-axle semi-trailer | 0.2312 | 0.2855 |
| PIS and NIS | ||
| PIS | 0.2217 | 0.2183 |
| NIS | 0.3193 | 0.2855 |
| Separation Measures | ||||||
|---|---|---|---|---|---|---|
| Vehicle Alternatives | Vehicle Alternatives | Vehicle Alternatives | Ci *** | Rank | ||
| 2-axle truck | 0.1016 | 2-axle truck | 0.0385 | 2-axle truck | 0.2748 | 4 |
| 3-axle truck | 0 | 3-axle truck | 0.1184 | 3-axle truck | 1 | 1 |
| 4-axle truck | 0.0160 | 4-axle truck | 0.1078 | 4-axle truck | 0.8706 | 2 |
| 5-axle semi-trailer | 0.0678 | 5-axle semi-trailer | 0.0880 | 5-axle semi-trailer | 0.5649 | 3 |
| SCENARIO NO | Forest Product Tree Group | Forest Production Amount (m3)-(kg) | Transportation Distance (km) | Mean Road Longitudinal Uphill -Downhill Grade (%) | Maximum Speed (km/h) | VEHİCLE ALTERNATIVES | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2-Axle Truck | 3-Axle Truck | 4-Axle Truck | 5-Axle Semi-Trailer Vehicle | ||||||||||
| Value | Rank | Value | Rank | Value | Rank | Value | Rank | ||||||
| 1 | CONIFEROUS SPECIES (Moisture included density- 616.95 kg/m3) | 50 m3 (30,847.5 kg) | 150 | 4-4 | 90 | 0.2748 | 4 | 1 | 1 | 0.8706 | 2 | 0.5649 | 3 |
| 2 | 200 | 4-4 | 90 | 0.2674 | 4 | 1 | 1 | 0.8757 | 2 | 0.5849 | 3 | ||
| 3 | 250 | 4-4 | 90 | 0.2596 | 4 | 1 | 1 | 0.8808 | 2 | 0.6049 | 3 | ||
| 4 | 300 | 4-4 | 90 | 0.2557 | 4 | 1 | 1 | 0.8832 | 2 | 0.6143 | 3 | ||
| 5 | 100 m3 (61,695 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.6668 | 3 | 1 | 1 | 0.7847 | 2 | |
| 6 | 200 | 4-4 | 90 | 0 | 4 | 0.6661 | 3 | 1 | 1 | 0.7952 | 2 | ||
| 7 | 250 | 4-4 | 90 | 0 | 4 | 0.6654 | 3 | 1 | 1 | 0.8053 | 2 | ||
| 8 | 300 | 4-4 | 90 | 0 | 4 | 0.6650 | 3 | 1 | 1 | 0.8101 | 2 | ||
| 9 | 150 m3 (92,542.5 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.6288 | 3 | 0.8170 | 2 | 0.9259 | 1 | |
| 10 | 200 | 4-4 | 90 | 0 | 4 | 0.6213 | 3 | 0.8125 | 2 | 0.9293 | 1 | ||
| 11 | 250 | 4-4 | 90 | 0 | 4 | 0.6136 | 3 | 0.8080 | 2 | 0.9329 | 1 | ||
| 12 | 300 | 4-4 | 90 | 0 | 4 | 0.6100 | 3 | 0.8058 | 2 | 0.9346 | 1 | ||
| 13 | 200 m3 (123,390 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.5902 | 3 | 0.8815 | 2 | 0.9135 | 1 | |
| 14 | 200 | 4-4 | 90 | 0 | 4 | 0.5845 | 3 | 0.8746 | 2 | 0.9173 | 1 | ||
| 15 | 250 | 4-4 | 90 | 0 | 4 | 0.5787 | 3 | 0.8675 | 2 | 0.9212 | 1 | ||
| 16 | 300 | 4-4 | 90 | 0 | 4 | 0.5758 | 3 | 0.8641 | 2 | 0.9231 | 1 | ||
| SCENARIO NO | Forest Product Tree Group | Forest Production Amount (m3)-(kg) | Transportation Distance (km) | Mean road Longitudinal Uphill-Downhill Grade (%) | Maximum Speed (km/h) | VEHICLE ALTERNATIVES | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 2-Axle Truck | 3-Axle Truck | 4-Axle Truck | 5-Axle Semi-Trailer Vehicle | ||||||||||
| Value | Rank | Value | Rank | Value | Rank | Value | Rank | ||||||
| 1 | BROADLEAVED SPECIES (Moisture included density- 986.42 kg/m3) | 50 m3 (49,321.25 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.6997 | 2 | 0.6678 | 3 | 0.9657 | 1 |
| 2 | 200 | 4-4 | 90 | 0 | 4 | 0.6917 | 2 | 0.6672 | 3 | 0.9672 | 1 | ||
| 3 | 250 | 4-4 | 90 | 0 | 4 | 0.6835 | 2 | 0.6666 | 3 | 0.9687 | 1 | ||
| 4 | 300 | 4-4 | 90 | 0 | 4 | 0.6796 | 3 | 0.6663 | 2 | 0.9694 | 1 | ||
| 5 | 100 m3 (98,642.5 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.6256 | 3 | 0.8217 | 2 | 0.9250 | 1 | |
| 6 | 200 | 4-4 | 90 | 0 | 4 | 0.6188 | 3 | 0.8155 | 2 | 0.9287 | 1 | ||
| 7 | 250 | 4-4 | 90 | 0 | 4 | 0.6118 | 3 | 0.8092 | 2 | 0.9326 | 1 | ||
| 8 | 300 | 4-4 | 90 | 0 | 4 | 0.6085 | 3 | 0.8062 | 2 | 0.9344 | 1 | ||
| 9 | 150 m3 (147,963.75 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.6502 | 3 | 0.9007 | 1 | 0.8981 | 2 | |
| 10 | 200 | 4-4 | 90 | 0 | 4 | 0.6432 | 3 | 0.8931 | 2 | 0.9028 | 1 | ||
| 11 | 250 | 4-4 | 90 | 0 | 4 | 0.6360 | 3 | 0.8853 | 2 | 0.9076 | 1 | ||
| 12 | 300 | 4-4 | 90 | 0 | 4 | 0.6326 | 3 | 0.8815 | 2 | 0.9099 | 1 | ||
| 13 | 200 m3 (197,285 kg) | 150 | 4-4 | 90 | 0 | 4 | 0.6598 | 3 | 0.9355 | 1 | 0.8843 | 2 | |
| 14 | 200 | 4-4 | 90 | 0 | 4 | 0.6528 | 3 | 0.9274 | 1 | 0.8894 | 2 | ||
| 15 | 250 | 4-4 | 90 | 0 | 4 | 0.6457 | 3 | 0.9192 | 1 | 0.8946 | 2 | ||
| 16 | 300 | 4-4 | 90 | 0 | 4 | 0.6422 | 3 | 0.9152 | 1 | 0.8971 | 2 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akay, A.O.; Demir, M. A Scenario-Based Analysis of Forest Product Transportation Using a Hybrid Fuzzy Multi-Criteria Decision-Making Method. Forests 2022, 13, 730. https://doi.org/10.3390/f13050730
Akay AO, Demir M. A Scenario-Based Analysis of Forest Product Transportation Using a Hybrid Fuzzy Multi-Criteria Decision-Making Method. Forests. 2022; 13(5):730. https://doi.org/10.3390/f13050730
Chicago/Turabian StyleAkay, Anil Orhan, and Murat Demir. 2022. "A Scenario-Based Analysis of Forest Product Transportation Using a Hybrid Fuzzy Multi-Criteria Decision-Making Method" Forests 13, no. 5: 730. https://doi.org/10.3390/f13050730
APA StyleAkay, A. O., & Demir, M. (2022). A Scenario-Based Analysis of Forest Product Transportation Using a Hybrid Fuzzy Multi-Criteria Decision-Making Method. Forests, 13(5), 730. https://doi.org/10.3390/f13050730