1. Introduction
Past land management practices, including wildfire suppression, extensive timber harvesting, and grazing have left many dry western US forests prone to greater extents of high severity fire than occurred historically [
1]. In addition to being ecologically detrimental, the contemporary patterns of high severity fire put lives, property, and natural resources in danger [
2]. Fuel reduction treatments are often used to mitigate fire hazards in strategic areas to help decrease the risk of harming these assets [
3]. These treatments have been shown to be effective in ameliorating fire behavior and reducing tree mortality through both modeled simulations [
4,
5] and when encountered by real wildfires [
3,
6,
7,
8,
9,
10,
11,
12,
13]. Recent studies suggest the duration for reduction in potential fire behavior and effects, or treatment longevity, can exist for up to 8–15 years in the Sierra Nevada [
14,
15]. Some have argued that fuel reduction treatments are the most cost-effective solution in the face of our current fire suppression expenditures because treating the forest will keep fire in check more economically than suppression alone [
16].
Fuel reduction treatments in the Sierra Nevada have multiple effects on fuel structure, reducing surface fuels, ladder fuels, and canopy continuity while maintaining large, fire-resistant trees [
3,
4]. Treatments utilize different methods to accomplish these changes: prescribed burning, hand-thinning (generally targets trees under 30 cm in diameter at breast height (dbh)), mastication (targets understory trees and shrubs), mechanical harvesting (thin from below, targeting trees up to 76 cm dbh), and sometimes a combination of these. Each treatment type addresses a different subset of these effects, but the one common outcome is reduced ladder fuels. The extent of many contemporary fires is forcing land managers to coordinate fuel reduction treatments across landscapes to collectively reduce fire spread and intensity [
17]. Knowing the current state of fuels across landscapes is critical for planning this type of fuel treatment network, which requires accurate maps of surface, ladder, and canopy fuels.
Ladder fuels are difficult to account for in the field, and few studies have attempted to develop an explicit, field-based measurement procedure (but see [
18,
19,
20]). Instead, canopy base height (CBH) and a fuel model (sometimes with an adjustment of fire behavior) are used as a surrogate for ladder fuels [
21]. CBH is defined as the point above which there is a given mass of fuel per unit volume to carry the fire upward. In theory, CBH and the fuel model should account for ladder fuels, but in practice, CBH is poorly defined, hard to measure in the field, and is only complicated by ladder fuels that can be too small in diameter to include in the plot sample, but still contribute to the fire’s ability to crown [
21,
22,
23]. While the general definition of CBH is agreed upon, the threshold of fuel per unit volume is arbitrary; the most agreed-upon value is 0.012 kg m
−3 [
24], but other thresholds have been used [
25,
26,
27,
28].
CBH is often derived allometrically from plot tree lists, but has also been calculated through intensive sampling [
29], introducing potential errors when moving from the plot to the scale of the landscape. Some allometric equations only require species and dbh, though most also include some combination of tree height, crown length (or height to live crown base), and crown ratio or width [
25,
30,
31,
32,
33]. Equations developed for northern boreal plantations only required stand height and density to predict the canopy base height [
34], while in the Aleppo pine (
Pinus halepensis Mill.) forests of Greece, no satisfactory equation could be derived from basic stand measurements [
35]. Other methods for calculating CBH have been implemented: Wilson and Baker [
32] controlled for the variability of multilayered stands by taking the midpoint of minimum and average height to live crown base as the CBH. Cruz, Alexander, and Wakimoto [
36] introduced the concept of the fuel strata gap, which accounts for the vertical gap in fuels, as an alternative to CBH. CBH has been criticized for its arbitrary threshold and insensitivity to tree density when used to calculate a torching index for the “Fire and Fuels Extension” of the Forest Vegetation Simulator software [
23]. Because of this concern, an alternative measurement was created that could estimate torching without being so dependent on CBH [
23]. Even so, CBH remains a highly influential variable in many wildfire models used today [
22].
Light Detection and Ranging (LiDAR) is a remote sensing technology that has proven well-suited to account for forest structure when collected from the ground or the air [
37,
38,
39,
40,
41,
42,
43,
44]. Terrestrial LiDAR has been used to estimate canopy height, canopy cover, CBH, and fuel strata gap on the plot scale [
44]. Airborne LiDAR is already available to many US National Forests and National Parks, and has been used to specifically derive fire model inputs [
45,
46,
47], but the concerns about using CBH in place of a more direct measure of ladder fuels remain. One study in the Pinelands of New Jersey that examined the link between airborne LiDAR and shrub biomass [
48] suggests airborne LiDAR as a potential candidate for estimating shrubby ladder fuels, noting that normalized cover between 1 m and 4 m can distinguish recently burned sites where biomass and cover are lower. Clark
et al. [
49] used this same metric to directly equate to ladder fuels. Wing
et al. [
50] derived relative understory vegetation cover in northern California using airborne LiDAR with calibrated return intensities. While these studies were carried out in a different forest type, they suggest a starting-point for estimating ladder fuels in mixed conifer stands. These studies indicate the potential for developing a LiDAR-derived metric to better account for ladder fuels. This would be a useful asset, especially because of the potential for high spatial resolution over large areas.
The primary questions addressed by this study were: (1) Can a LiDAR-derived metric (or set of metrics) differentiate between treated and untreated areas? and (2) Does this metric (or set of metrics) correspond with field observations of ladder hazard? We explored some metric assumptions, compared the metric(s) to plot-based ladder fuel measurements, and visually assessed the validity of our conclusions from transects showing LiDAR points, aerial images, and treatment boundaries. We seek to robustly estimate ladder fuels and provide an alternative to the much-criticized surrogate (CBH).
2. Methods
2.1. Study Area
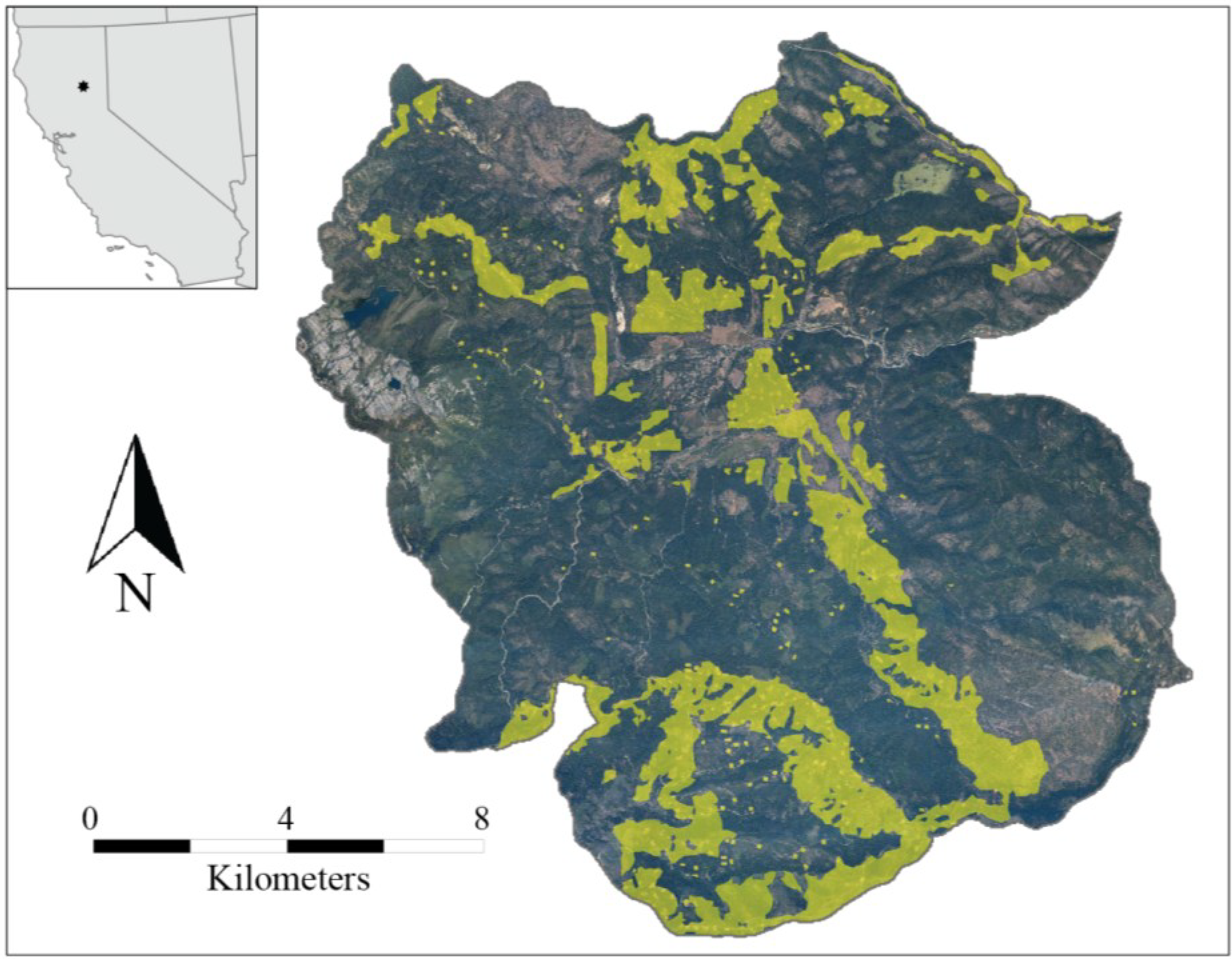
Meadow Valley is located in the northern Sierra Nevada of California in the Plumas National Forest (centered at 39°55′ North, 121°03′ West) (
Figure 1). It has a Mediterranean climate with most of its 1050 mm year
−1 of precipitation falling in the winter months [
51]. The 22,510 ha landscape ranges from 1050–2150 m in elevation and is made up of forest, montane chaparral, and meadows. A slightly larger study area than that in Collins
et al. [
52] was used to maximize LiDAR coverage. Tree species are primarily mixed conifer, including ponderosa pine (
Pinus ponderosa), Jeffrey pine (
Pinus jeffreyi), sugar pine (
Pinus lambertiana), Douglas-fir (
Pseudotsuga menziesii), white fir (
Abies concolor), incense-cedar (
Calocedrus decurrens), and California black oak (
Quercus kelloggii) [
53,
54]. Smaller pockets of red fir (
Abies magnifica) and western white pine (
Pinus monticola) are found at higher elevations, and lodgepole pine (
Pinus contorta), western juniper (
Juniperus occidentalis), California hazelnut (
Corylus cornuta), dogwood (
Cornus spp.), and willow (
Salix spp.) also occur at lower densities. The historic fire regime before fire suppression began in the early 1900s consisted of low to moderate severity fires burning at 7–19-year intervals [
55].
Figure 1.
Meadow Valley study area, showing areas with fuel reduction (in yellow) between 1999 and 2008.
Figure 1.
Meadow Valley study area, showing areas with fuel reduction (in yellow) between 1999 and 2008.
Recent fire activity has caused a rising concern about community safety and forest conservation, which spurred enactment of the Herger-Feinstein Quincy Library Group Pilot Project. The goals of the project were to maintain forest health, reduce potential for high severity fire, and conserve wildlife habitat, while maintaining the local economy [
56]. To reduce fire risk, a major objective was to increase the CBH from 1.2–2.4 m (pre-treatment) to at least 7.6 m (post-treatment), necessitating the removal of many small and medium trees (ladder fuels) [
56].
The above project implemented a variety of treatment types across the landscape to address its goals, resulting in a network of treatments that span a range of treatment intensities, types, and ages. Treatments can be classified into five types: (1) hand-thinning (chainsaw) and pile-burning trees <30 cm dbh; (2) rotary drum mastication of shrubs and small trees, with shredded debris left on-site; (3) prescription burning under moderate weather conditions; (4) mechanical thinning of trees <51 cm dbh, or <76 cm dbh, depending on silvicultural prescription, which, for some areas, was followed by prescription burning; and (5) group selection silviculture that removed all conifers <76 cm dbh [
56]. Reported treatments covered 3999 ha, or 18% of the total study area (see
Figure 1 for spatial arrangement) and were implemented primarily between 2003 and 2008 (10% of treatments were completed between 1999 and 2002). Treatment longevity has been estimated to be between 8 and 15 years in similar areas [
14,
15], so we were confident in including treatments up to 10 years old in the study sample.
A treatment polygon layer was assembled by the Herger-Feinstein Quincy Library Group monitoring team [
57], where treatments were represented spatially and described in detail. Areas were removed from analysis if they were unforested, had an incomplete treatment as of August 2009, or were treated extremely lightly (treatments designed for stream corridors that created negligible visual change [
58] or heavily (as was the case for group selection cuts). A buffer of 30 m to either side of all treatment boundaries was also excluded to account for inaccurately mapped treatment edges. This decreased the area of analysis from 22,510–17,800 ha, with 11% of that area treated (
Figure 1).
2.2. Field Data
We took advantage of two existing field datasets. One focused on treated areas, referred to as treatment plots; the other captured the range of vegetation/fuel conditions across the landscape, referred to as landscape plots. Treatment plots consisted of data collected prior to and following fuel reduction treatments, which were used to quantify change in ladder and canopy fuels. For this assessment, we relied on CBH to represent ladder fuels, and canopy cover and bulk density to represent canopy fuels. While these metrics, particularly CBH, are problematic for the reasons discussed above, they provided the best estimate feasible from the field. The intent was not to develop a direct relationship between CBH and LiDAR, but rather to confirm that the treatments did reduce ladder and canopy fuels.
Treatment plots were established in areas planned for treatment, prior to treatment implementation, located across a range of topographic settings and treatment types. A total of 72 plots were established; 26 were excluded because they were either located in areas never treated (16), had undergone group selection silviculture (3), or had poor consistency between measurements (abundant new large and small trees appearing in the plot after treatment) (7). Treatment plots were sampled 1–3 years before treatment (sampled between 2002 and 2007), and again 1 year after treatment (sampled between 2004 and 2009). Treatment plots measured 50 m by 20 m (0.1 ha), and sampling involved measuring large trees (≥76.2 cm dbh) across the entire plot, medium–large trees (40.6–76.1 cm dbh) on the center half of the plot, medium–small trees (12.7–40.5 cm dbh) on the center quarter of the plot, and small trees (2.5–12.6 cm dbh) on five subplots (each 16 m
2) along the plot centerline. Tree measurements included height, crown base height, and dbh. The Forest Vegetation Simulator (FVS) [
59] was used to calculate the stand-level metrics shown in
Table 1 to quantify treatment change. This demonstrated that treatments were effective in reducing cover and density and increased canopy base height by removing mostly small and medium sized trees.
Table 1.
Forest characteristics before and after treatment in Meadow Valley; plots (46) were measured before and after treatment, metrics were calculated with FVS [
59], and the resultant change is shown; ladder fuel reduction is indicated by (1) an increase in CBH and (2) a large reduction in trees ha
−1 paired with a relatively smaller reduction in basal area (many trees were removed, but most were small).
Table 1.
Forest characteristics before and after treatment in Meadow Valley; plots (46) were measured before and after treatment, metrics were calculated with FVS [59], and the resultant change is shown; ladder fuel reduction is indicated by (1) an increase in CBH and (2) a large reduction in trees ha−1 paired with a relatively smaller reduction in basal area (many trees were removed, but most were small).
| Pre-treatment (St. error) | Post-treatment (St. error) | Percent of original |
|---|
| Tree density (trees ha−1) | 1045 (111) | 412 (63) | 40 |
| Basal area (m2 ha−1) | 43 (3) | 29 (3) | 67 |
| Canopy base height (m) | 3.0 (0.4) | 6.7 (0.1) | 223 |
| Canopy bulk density (kg m−3) | 0.18 (0.01) | 0.09 (0.01) | 51 |
| Canopy cover (%) | 58 (3) | 41 (3) | 71 |
Landscape plots were a second field data collection effort, utilizing methodology outlined by Menning and Stephens [
18]. These data were used to independently validate that the LiDAR metric correlated with ladder fuels. Landscape plots were sampled within and outside the Meadow Valley study area between 2004 and 2006. Plot locations were chosen randomly from the stratified landscape. Stratifications encompassed four categories (three topographic and one biotic), each classified into 3–6 levels. Categories included slope (three levels: >15%, 15%–30%, >30%), elevation (three levels: <1400 m, 1400–1600 m, >1600 m), aspect (four levels: N, E, S, W), and dominant vegetation (six levels based on the California Wildlife Habitat Relationship classes derived from interpreted aerial images) [
60]. Plots were circular, with a fixed radius of 12.6 m, representing an area of 0.05 ha. Plot centers were recorded with Trimble’s GeoXT global positioning system (GPS) and differentially corrected. To calculate ladder fuels, each plot was divided into four equal quadrants, and the ladder fuel class (A, B, C, D, or E, described in
Table 2) was assessed visually and recorded for each quadrant [
18]. Fuel classes were determined by a combination of vertical fuel continuity (vertical gap greater than
vs. less than 2 m) and the presence of low aerial fuels (e.g., high shrubs (>2 m), small trees, and low branches). Canopy cover was also assessed at each plot using the number of hits from a sight-tube along two 12-m transects (1 sample m
−1).
Table 2.
Ladder fuel hazard assessment classes [
18].
Table 2.
Ladder fuel hazard assessment classes [18].
| Class | Clumped low aerial fuels | Vertical gaps <2 m |
|---|
| A | yes | yes |
| B | yes | no |
| C | no | yes |
| D | no | no |
| E | no forest | no forest |
There were 140 plots within the study area that were forested and either untreated or completely treated when field work began in spring 2004. Variability among plots was high, with only 28 plots (20%) falling into clearly low (all quadrants were class D) or high (all quadrants were class A) levels of ladder fuels. We defined a more inclusive classification method to preserve sample size (73 plots; 52% of the original 140) while maintaining a robust designation of low and high ladder fuel plots. Because vertical fuel continuity corresponds more closely to the traditional definition of ladder fuels, we assigned a high ladder fuel class to plots where there was high vertical continuity (gaps were small), regardless of the presence of low aerial fuel. However, we maintained our definition for low ladder fuels in its purest form: large gaps and no low aerial fuels. Each plot (of four subplots) was classified as having high ladder fuels if it had at least two subplots of class A or C (gaps <2 m), and no subplots of class D (no low fuel; gaps >2 m). Plots were classified as having low ladder fuels if at least two subplots were class D (no low fuel; gaps >2 m) and no subplots were class A or C (gaps <2 m). While we realize that this approach is somewhat subjective, we wanted to avoid an excessive reduction in sample size when classifying the plots. The majority of the plots did not intersect treatments, though eight had been lightly treated between 1999 and 2004. For this delineation, only half of the plots were classified as having either low or high ladder fuels, demonstrating the high variability of ladder fuels within each plot, and to an even greater degree across the landscape.
2.3. LiDAR Data and Processing
LiDAR was flown between July 31 and August 11, 2009, by Watershed Sciences for the Plumas and Lassen National Forests. A Leica ALS50 Phase II laser system was used with a scan angle of ± 14° from nadir to collect LiDAR points. Orthophotos were also taken with a Leica RCD-105 39 megapixel digital camera and processed with Leica’s Calibration Post Processing software. Photos were spatially placed using IPASCO and the Leica Photogrammetry Suite. The average point density was 4.68 points m−2. The vendor reported average vertical and horizontal accuracy were 2.6 cm and 7.2 cm, respectively, based on the mean divergence of points from ground survey point coordinates (3089 ground points were analyzed across four surveyed areas).
Fusion software [
61] was used to extract LiDAR-derived metrics for analysis at a scale of 30 m to determine whether a metric (or set of metrics) could differentiate between treated and untreated areas. We chose this spatial scale because it is common amongst many datasets used by land managers, including Landsat and the LANDFIRE dataset [
62]. Fusion software was used to extract a total of 53 different metrics accounting for topography (5) and forest structure (48) [
61] (described in detail in
Appendix Table A1). We also added six additional strata layers (2–4 m, 4–8 m, 8–16 m, 16–32 m, 32–48 m, and >48 m) that accounted for the relative cover in a layer based on hits within and below that layer, as described by Skowronski
et al. [
48] and Kane
et al. [
39]. No points below 2 m were used as the primary metric due to the potential error in differentiating ground points from vegetation, following Kane
et al. [
39] (though point counts below 2 m were used to calibrate the strata layers described above).
We clipped the LiDAR pointcloud to the plot boundaries (plot center with a 12.6 m radius) and calculated the average value of the LiDAR-derived metric(s) within that area to determine whether this metric (or set of metrics) corresponded with field observations of ladder hazard.
2.4. Workflow
Our workflow, shown in
Figure 2, illustrates how we used the two sets of field data, airborne LiDAR, and spatial data denoting fuel reduction treatment boundaries to address our research questions.
Figure 2.
Project work flow, including all data sources and methods; analysis products are shown in ovals; data sources and intermediate steps are shown in rectangles.
Figure 2.
Project work flow, including all data sources and methods; analysis products are shown in ovals; data sources and intermediate steps are shown in rectangles.
2.5. Statistical Analysis
We used classification tree analysis to determine whether a LiDAR-derived metric (or set of metrics) could differentiate between treated and untreated areas. The classification trees identified LiDAR-derived metrics that helped explain the difference between treated and untreated pixels (
Figure 3). Classification trees explain the variation of a categorical response variable by splitting the sample one or more times into relatively homogeneous groups with respect to the response variable. Each split breaks the data into two nodes based on an explanatory variable and a break point (if the value for the explanatory variable is greater than the breakpoint, that data point goes into one node, and if not, it goes to the other node). A model is chosen that fits the data, but also minimizes the number of splits. A classification tree approach was chosen rather than standard linear regression because our response variable was categorical (treated or untreated), and we were interested in considering all potential explanatory variables (many of which were correlated) but identifying only those important for differentiating between treated and untreated areas [
63]. We were not trying to build a predictive model (already pursued by many, with varying degrees of success [
45,
46,
47]), but simply identifying factors that would merit further investigation, and believed that exploring the data with classification trees was the most straightforward and understandable approach.
Figure 3.
An example classification tree differentiating between treated and untreated cells at a sampling density of every 10th cell is shown; pruned nodes are grayed out; the only break metric in this classification was 2–4 m cover, with a break point of 4.4%; misclassification for the pruned tree can be calculated as the number of samples wrongly classified (17 + 64)/the total number of samples (410) = 19%; because there is an equal number of treated and untreated samples, the null model misclassification rate is 205/410 = 50%.
Figure 3.
An example classification tree differentiating between treated and untreated cells at a sampling density of every 10th cell is shown; pruned nodes are grayed out; the only break metric in this classification was 2–4 m cover, with a break point of 4.4%; misclassification for the pruned tree can be calculated as the number of samples wrongly classified (17 + 64)/the total number of samples (410) = 19%; because there is an equal number of treated and untreated samples, the null model misclassification rate is 205/410 = 50%.
To account for spatial autocorrelation and the robustness of the classification tree, 30 m cells were sampled at densities of every cell (0 m apart) and 5, 10, 15, and 20-cell spacing (120, 270, 420, and 570 m apart). Because only 11% of the sample area was treated, untreated cells were resampled for even representation of treated and untreated area.
For each cell density, the classification tree algorithm was implemented in R [
64] using the rpart algorithm to build a model that best differentiated between treated and untreated cells using the LiDAR-derived response variables. Each tree was pruned to the fewest nodes with cross-validation error within one standard deviation of the lowest cross-validated error. The goal of this analysis was to reveal the metric or set of metrics best able to differentiate between the treated and untreated landscape.
To determine whether this metric (or set of metrics) corresponded with field observations of ladder hazard, we tested the predictive power of the metric (s) revealed by part 1 against the only established method for quantifying ladder fuels (known to us), developed by Menning and Stephens [
18]. We ran an analysis of covariance between ladder fuel class (using the high
vs. low designations described above), the metric value, the field-calculated canopy cover, and an interaction term between the metric and canopy cover. The purpose of this test was two-fold: (1) explore the potential bias of cover to the LiDAR-derived measure of ladder fuels based on the possibility of differential point penetration; and (2) evaluate the relationship between the LiDAR-derived metric and the plot-based measure of ladder fuels. The potential bias (1) would be disproved if there was no significant contribution of either canopy cover or the interaction between canopy cover and the LiDAR metric to the estimation of ladder fuels. The relationship between ladder fuel and the metric (2) would be revealed through the significance of the LiDAR metric in the model. If significant, this test would show that the LiDAR-derived metric could predict at least some aspect of ladder fuels.
To visually confirm our results, we created eight transect images of the LiDAR where it crossed a treatment boundary, paired with the orthophoto collected with the LiDAR, as well as the reported treatment boundary. Transects were 300 m long and 10 m wide. Transect locations were chosen where the treatment boundary appeared to agree well with the metric estimate and where the metric changed as it crossed from treated to untreated. This was typical of most, but not all treatments. Although this test is not a random sample, we were interested in investigating the LiDAR point distribution in the cases identified by the statistical analysis where the metric changed. While this test was qualitative, it provided an opportunity to visually assess our results.
3. Results
Classification tree results at all spatial scales pointed to a single, most important variable: the relative percent cover between 2 m and 4 m, referred to subsequently as “2–4 m cover” (
Table 3). A sample classification tree is shown in
Figure 3 to illustrate tree structure, pruning, and misclassification rate calculations. The misclassification rate at all spatial scales was low for models built with just a single split (between 17% and 21% misclassification compared to the null model’s 50%), showing that model fit was good. The classification tree analysis of the full landscape was the only model that had more than one split. Additional splits further defined treated pixels as having slope <22° and cover (percentage of point heights above 3 meters) <70%, yet only improved the misclassification rate by 2%, pointing to 2–4 m cover as the primary metric of interest for the second stage of our analysis.
Figure 4 shows the levels of 2–4 m cover across the landscape and confirms that a low break point between 3% and 8% (the range suggested by the break points in
Table 3) was a good indicator of treatment.
Figure 4.
Meadow Valley study area, showing areas with fuel reduction and those with no treatment after 1999; green to red color scale indicates the relative percentage of 2–4 m cover across the analyzed treated (left) and untreated (right) landscape.
Figure 4.
Meadow Valley study area, showing areas with fuel reduction and those with no treatment after 1999; green to red color scale indicates the relative percentage of 2–4 m cover across the analyzed treated (left) and untreated (right) landscape.
Table 3.
Results from classification tree analyses at a range of spatial sampling scales, describing the break point metric, the break point value, and the misclassification rate for the pruned tree (compared to 50% misclassification in the null model); *Only one pruned classification tree (every cell) had more than one break; In this case, the full model had three breaks (in order, these breaks were 2–4 m cover, slope in degrees, and percentage of point heights above 3 meters, with breakpoints at 6.3%, 22°, and 70%, respectively), with a misclassification rate of 18% (compared to 20% using only the first break).
Table 3.
Results from classification tree analyses at a range of spatial sampling scales, describing the break point metric, the break point value, and the misclassification rate for the pruned tree (compared to 50% misclassification in the null model); *Only one pruned classification tree (every cell) had more than one break; In this case, the full model had three breaks (in order, these breaks were 2–4 m cover, slope in degrees, and percentage of point heights above 3 meters, with breakpoints at 6.3%, 22°, and 70%, respectively), with a misclassification rate of 18% (compared to 20% using only the first break).
| Sampling method (sample size) | Break metric | Break point | % misclassification |
|---|
| Every cell* (43,542) | % 2–4 m cover | 6.3 | 20 |
| Every 5th cell (1718) | % 2–4 m cover | 6.1 | 20 |
| Every 10th cell (410) | % 2–4 m cover | 4.4 | 19 |
| Every 15th cell (216) | % 2–4 m cover | 7.5 | 17 |
| Every 20th cell (96) | % 2–4 m cover | 3.4 | 21 |
To ensure that canopy cover was not biasing our LiDAR results (by not allowing enough pulse penetration through the canopy to obtain a robust estimate), we tested whether high
vs. low ladder fuels (measured on the ground) were affected by plot-derived canopy cover, 2–4 m cover, or the interaction between the two using an analysis of covariance. We found that ladder fuels were not significantly influenced by either canopy cover or the interaction between canopy cover and 2–4 m cover, while they were significantly influenced by 2–4 m cover alone (
p < 0.05,
n = 73). The distribution of 2–4 m cover across high and low levels of ladder fuels is shown in
Figure 5. This model used only 2–4 m cover as a predictor for plot-derived ladder fuel and the split occurred at 5.3%, squarely within the range suggested by the break points in
Table 3.
Figure 5.
Box and whisker plot of the distribution of LiDAR-derived relative percentage of 2–4 m cover within plots having low and high ladder fuel abundance as derived from field plots using the methods of Menning and Stephens [
18] (
n = 73); distributions were significantly different (
p < 0.001); median 2–4 m cover in high ladder fuel plots was 13.0%, while it was 4.0% in low ladder fuel plots; *outliers are not shown to simplify viewing.
Figure 5.
Box and whisker plot of the distribution of LiDAR-derived relative percentage of 2–4 m cover within plots having low and high ladder fuel abundance as derived from field plots using the methods of Menning and Stephens [
18] (
n = 73); distributions were significantly different (
p < 0.001); median 2–4 m cover in high ladder fuel plots was 13.0%, while it was 4.0% in low ladder fuel plots; *outliers are not shown to simplify viewing.
In our analysis, we came upon a few areas that appeared uncharacteristic of the general trend (identified as treated, but whose 2–4 m cover was an outlier among the treated polygons). While this brings into question the validity of the treatment boundaries we used to analyze the data, the area of these anomalies was small compared to the overall study area. We communicated with the Plumas National Forest (USFS) office and obtained specific details on these areas to determine the exact treatment history [
65]. All cases revealed that the unit in question was either: (1) untreated at the time of the LiDAR flight (
i.e., the date of completion was misreported in our database), (2) contained a riparian or other sensitive area (which, by law, could not be treated, but was included as treated in our dataset), (3) appeared to have poorly mapped boundaries beyond the 30 m buffer we created to mitigate for these, or (4) had variable treatment effects throughout treatment units (as was the case with some burned units). Inaccurate treatment boundaries are an issue land managers must deal with on a regular basis, but this research shows a potential alternative method for checking treatment boundaries against those reported, and could prove to be a valuable asset.
4. Discussion
Fuel treatments are critical to mitigating fire risk and target surface, ladder, and sometimes canopy fuels. Ladder fuels are not directly measured in the field, however, and the derived proxy of CBH is used in place of a better metric. CBH is an extremely influential metric for crown fire initiation models [
22,
52], yet poorly represents ladder fuels [
21]. Furthermore, since CBH is derived allometrically using tree lists, it is generally associated with a high degree of spatial error [
47]. The dependence on such a tenuous variable makes output from fire models more uncertain than would be desired. This uncertainty has even driven the development of more unconventional measures of fire behavior that depend on more direct plot-derived data rather than CBH (e.g., P-torch as used in the Fire and Fuels Extension to the Forest Vegetation Simulator [
23]).
Methods to directly quantify ladder fuels using a key in the field are rare [
18,
19,
20]. Menning and Stephens’ approach was semi-qualitative, and classified ladder fuels into one of five types, which proved to be highly variable even within the four adjacent subplots [
18]. Subplot variability suggests that upscaling plot-based measures to the stand scale (as done to populate a landscape from plots for a 2-dimensional fire model) may be inaccurate and points to the necessity for a remote-sensing derived, landscape-scale ladder fuel metric that quantifies heterogeneity within stands. Our work demonstrates the potential application of LiDAR for quantifying ladder fuels, which has already been used to describe forest structure beneath the canopy [
37,
39,
43]. Despite our fairly successful findings, questions concerning appropriate measurement scale and ladder fuel variability and clumpiness still need to be addressed.
4.1. Relationship between Treatments, LiDAR, and Ladder Fuels
On a 17,800 ha landscape, 11% of which had undergone fuel reduction that effectively reduced ladder fuels and slightly reduced canopy fuels (
Table 1), 2–4 m cover proved to be the LiDAR-derived metric with the most explanatory power to differentiate between treated and untreated areas (
Figure 4). The model accurately predicted fuel treatment presence
vs. absence for 79%–83% of the analyzed pixels across a range of sampling densities, with break points ranging between 3.4% and 7.5% (
Table 3). While this model was not a perfect fit, our objective was not to build a model that could determine the location of fuel reduction treatments, but rather, to select candidate variables for further testing. When compared to an independent, field-designated assessment of ladder fuel, the distribution of 2–4 m cover was significantly different between plots with high and low quantities of ladder fuel (
Figure 5). The break point identified by this analysis was 5.3%, which falls squarely within the range suggested by our first test. Images supported the conclusion that the ladder fuels that could not be seen from the air or easily extrapolated from plot-based measures could be estimated from LiDAR. Inasmuch as CBH can be compared with the 2–4 m cover LiDAR metric, average pre-treatment CBH in treatment plot tree lists was 3.0 m (
Table 1), which is within the 2–4 m range. This convergence suggests our metric may be indicating a vital height range to monitor when considering ladder fuels. Furthermore, studies in the Pinelands of New Jersey have suggested a very similar metric that correlates with shrub biomass that has been equated to ladder fuels [
48,
49].
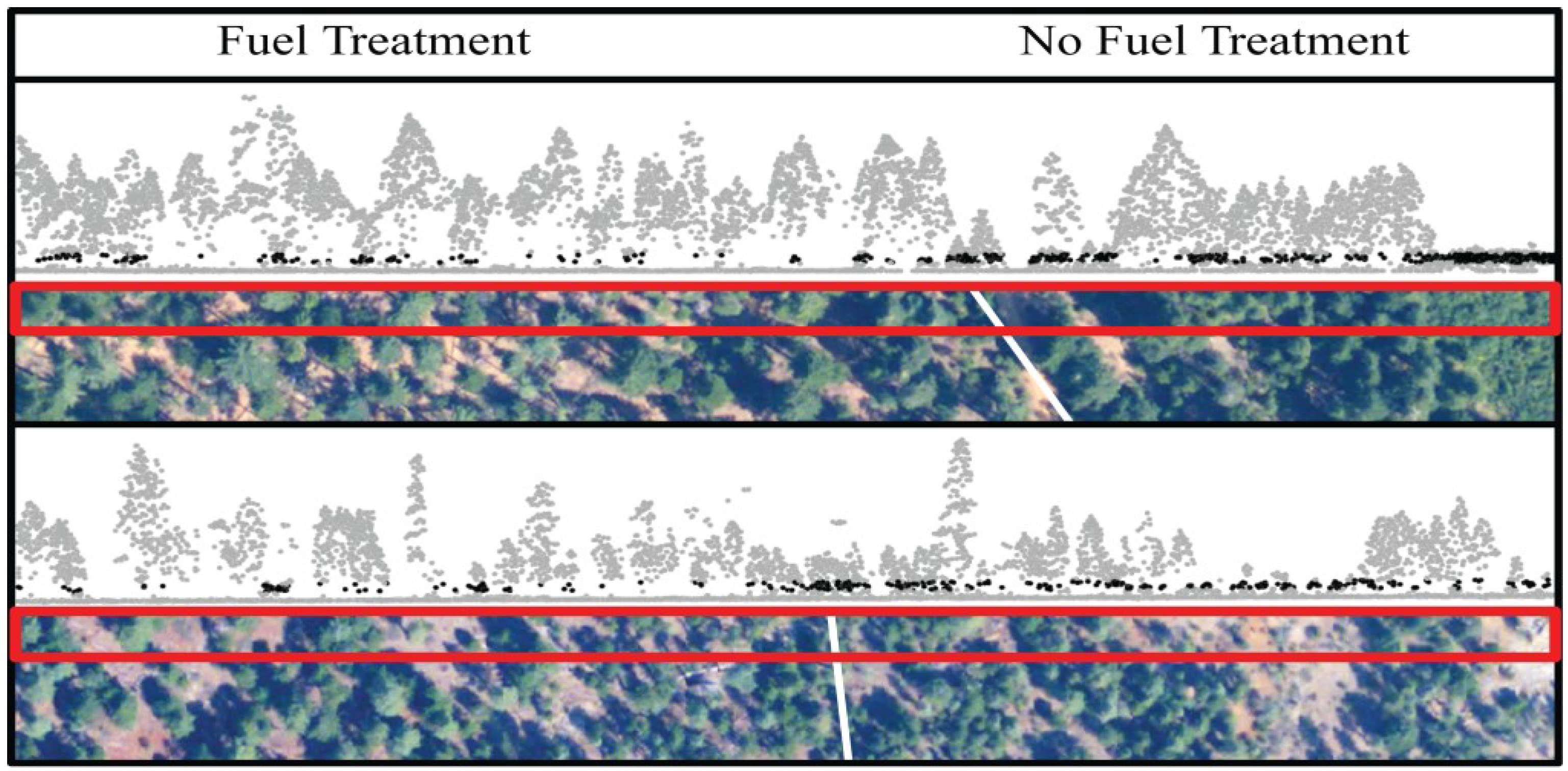
Figure 6 shows two of the transect images that we created to visually assess the relationship between 2–4 m cover and fuel treatment. These images are representative of those we created, and were chosen to depict a range of conditions. Both images show a distinct difference in 2–4 m cover across the treatment boundary. The top image shows an area with heavy cover (LiDAR-derived cover varied from 48–78% along the transect) as well as a portion of dense shrubs on the far right. There is a potential instance of LiDAR hits not penetrating the canopy just to the right of the treatment boundary, but overall, the point penetration is adequate. The bottom image shows an area with lighter cover (cover varied between 18% and 61% along the transect); the treatment is hard to discern from the aerial image alone, but quite apparent from the LiDAR’s 2–4 m point density.
Figure 6.
Two pairs of transect images, each showing a 300 m by 10 m transect of LiDAR points across a treatment boundary, paired with the corresponding aerial image; the LiDAR has been transformed to show an even ground elevation and points 2–4 m from the ground are shown in black; the aerial image shows the transect outlined in red and the treatment boundary in white; transects were chosen to present different levels of canopy density (cover varied between 48% and 78% in the upper image pair and 18% and 61% in the lower pair) and the visual ambiguity of treatments in the aerial image (treatment is apparent in the aerial image of the upper transect, but difficult to discern from the aerial image of the lower transect).
Figure 6.
Two pairs of transect images, each showing a 300 m by 10 m transect of LiDAR points across a treatment boundary, paired with the corresponding aerial image; the LiDAR has been transformed to show an even ground elevation and points 2–4 m from the ground are shown in black; the aerial image shows the transect outlined in red and the treatment boundary in white; transects were chosen to present different levels of canopy density (cover varied between 48% and 78% in the upper image pair and 18% and 61% in the lower pair) and the visual ambiguity of treatments in the aerial image (treatment is apparent in the aerial image of the upper transect, but difficult to discern from the aerial image of the lower transect).
This study is exploratory, however, and has a number of limitations. This research was done
post hoc, leaving a greater chance for type I error (finding a relationship where one does not actually exist). The study utilized a single study area, necessitating further work to validate the findings beyond this area before they should be used operationally. We also utilized a non-conventional, two-step process to reach our conclusions, potentially introducing additional sources of error. We used fuel reduction treatment as a proxy for ladder fuels in order to narrow down the pool of LiDAR metrics to those that likely related to ladder fuels. Our pool of LiDAR metrics did not include strata below 2 m in height due to increased noise in the dataset [
39] and fuels below 2 m generally being classified as surface fuel characteristics, leaving out this measure of fuel hazard. Our analysis used only one statistical model (classification trees), which converged on a single metric: 2–4 m cover. Comparison with measurements of the fuel treatments themselves revealed that these treatments were targeting fuels in the 2–4 m range, suggesting that the classification tree analysis may have been biased toward the 2–4 m range. This metric does not include any information about fuels outside of the 2–4 m range, or describe the relative clumping of fuels within that range. Our final test compared the single LiDAR-derived metric (2–4 m cover) to a simplified categorical classification (with its own inherent biases) of ladder fuels.
Nevertheless, this study suggests that ladder fuels can be at least partially accounted for by LiDAR, opening many avenues of further study. For instance, some studies have shown the utility of voxels (or “volume elements” rather than “picture elements” or pixels) [
66,
67] for modeling LiDAR density and forest structure, including canopy base height (e.g., [
66]). This newer data representation might lend itself well to the characterization of 3D forest structure, and in particular, ladder fuels. Additionally, there has been recent work examining tradeoffs between LiDAR point density and forest metric accuracy [
68], but no work to date on this and other scaling questions with respect to ladder fuels. Finally, better characterization of ladder fuels could add new information and a new analytical dimension to fire behavior and effects models, particularly those that deal with three-dimensional fire behavior (e.g., FIRETEC-HIGRAD; [
69]), and should be investigated.
4.3. Long-Term Uses of this Research to Managers
With further research, perhaps a more quantitative LiDAR-derived measure of ladder fuels could be developed. Compared to CBH, this measure would be more direct and would likely be more spatially accurate across landscapes and applicable across forest types. Furthermore, because this measure would be derived from LiDAR, it could be estimated across the whole landscape, instead of being limited to the plot and then scaled up. This would not only yield a superior product, but would maintain the spatial heterogeneity of fuels, a factor that researchers recognize as increasingly important to consider when modeling fire [
70].
If such a metric for ladder fuels was incorporated into fire models to replace CBH, crown fire predictive models could be improved [
71]. CBH is difficult to both measure and use, yet it has remained a vital component of fire models because no alternative measure exists. This research demonstrates the potential of a LiDAR-derived measure of ladder fuels that would be a more direct metric and could account for finer scale spatial heterogeneity across the landscape.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




