
Cost Minimizations and Performance Enhancements of Power Systems Using Spherical Prune Differential Evolution Algorithm Including Modal Analysis

 ,
, 
 ,
, 
Abstract
:1. Introduction
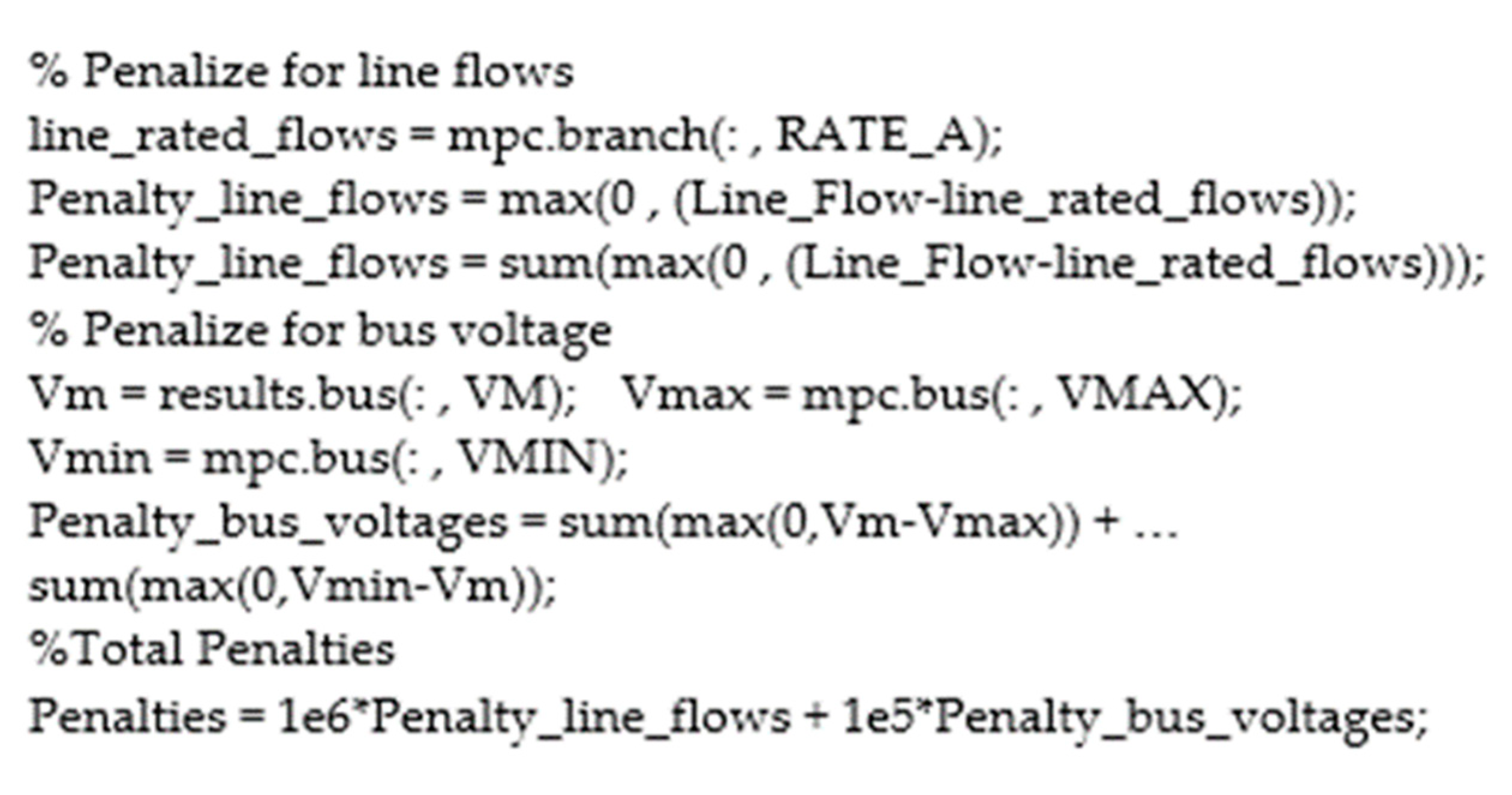
2. OPF Mathematical Representations
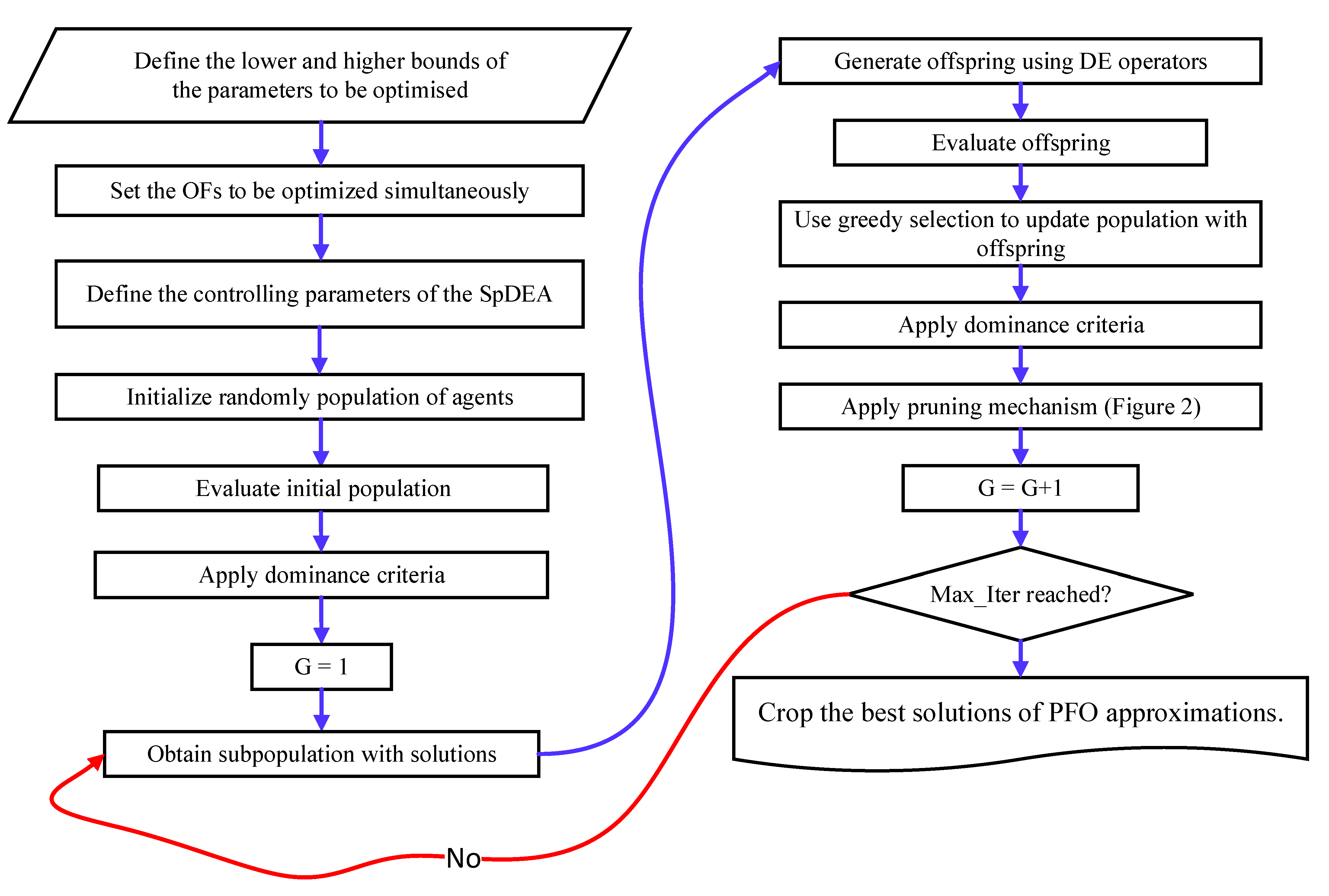
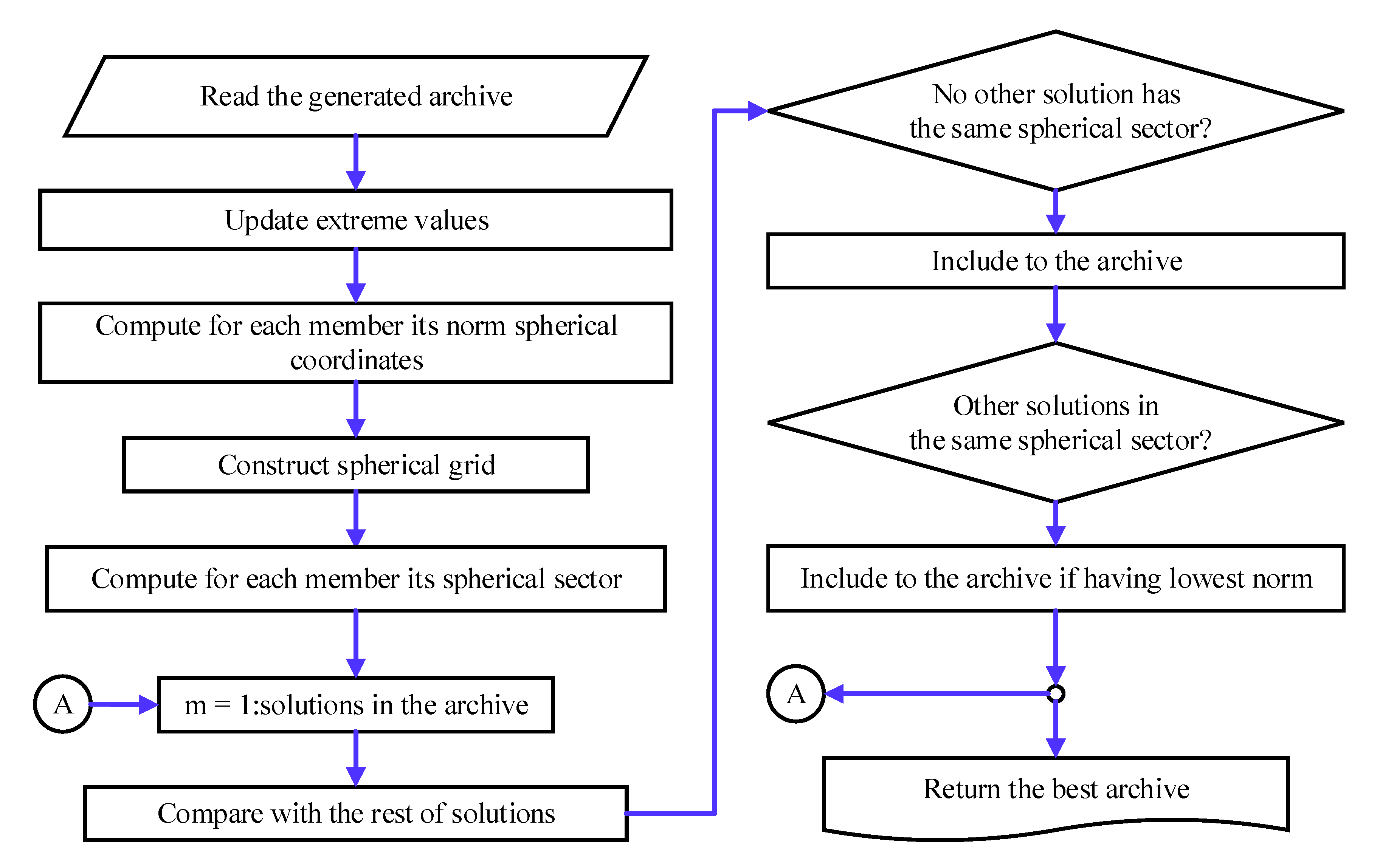
3. Mathematical Model of SpDEA
4. Numerical Simulations, Scenarios, and Discussions
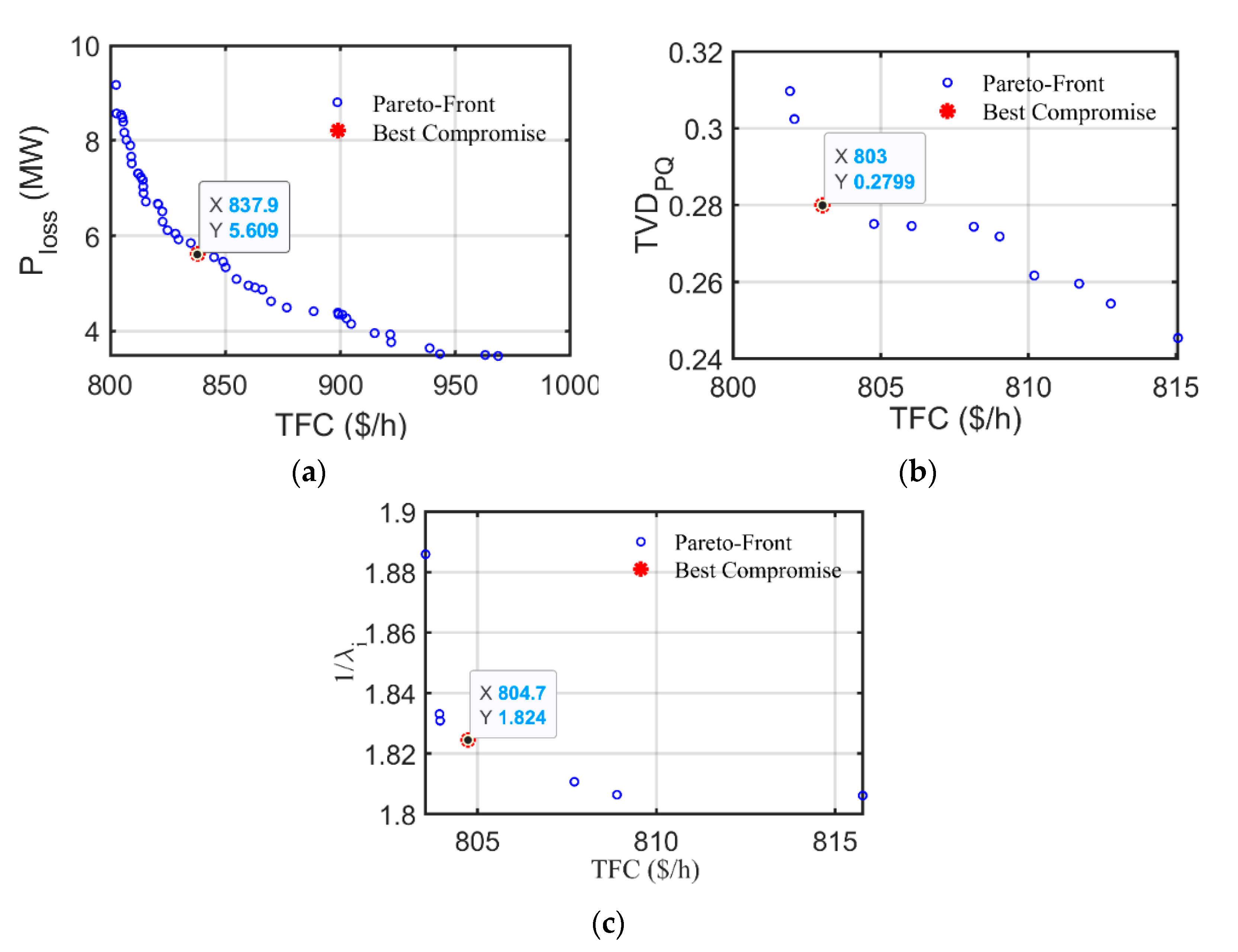
4.1. IEEE 30-Bus System
4.2. IEEE 118-Bus System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wood, A.J.; Wollenberg, B.F.; Sheblé, G.B. Power Generation, Operation, and Control, 3rd ed.; Wiley: New York, NY, USA, 2013; ISBN 978-0-471-79055-6. [Google Scholar]
- Bu, C.; Luo, W.; Zhu, T.; Yi, R.; Yang, B. Species and memory enhanced differential evolution for optimal power flow under double-sided uncertainties. IEEE Trans. Sustain. Comput. 2020, 5, 403–415. [Google Scholar] [CrossRef]
- Zhu, T.; Luo, W.; Bu, C.; Yue, L. Accelerate population-based stochastic search algorithms with memory for optima tracking on dynamic power systems. IEEE Trans. Power Syst. 2016, 31, 268–277. [Google Scholar] [CrossRef]
- Biswas, P.; Suganthan, P.; Amaratunga, G. Optimal power flow solutions using algorithm success history based adaptive differential evolution with linear population reduction. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Miyazaki, Japan, 7–10 October 2018. [Google Scholar] [CrossRef]
- Biswas, P.; Suganthan, P.; Qu, B.Y.; Amaratunga, G. Multiobjective economic-environmental power dispatch with stochastic wind-solar-small hydro power. Energy 2018, 150, 1039–1057. [Google Scholar] [CrossRef]
- Molzahn, D.K.; Hiskens, I.A. Sparsity-exploiting moment-based relaxations of the optimal power flow problem. IEEE Trans. Power Syst. 2015, 30, 3168–3180. [Google Scholar] [CrossRef]
- Fortenbacher, P.; Demiray, T. Linear/quadratic programming-based optimal power flow using linear power flow and absolute loss approximations. Int. J. Electr. Power Energy Syst. 2019, 107, 680–689. [Google Scholar] [CrossRef] [Green Version]
- Hörsch, J.; Ronellenfitsch, H.; Witthaut, D.; Brown, T. Linear optimal power flow using cycle flows. Electr. Power Syst. Res. 2018, 158, 126–135. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, E.J.; Oliveira, L.W.; Pereira, J.L.R.; Honório, L.M.; Marcato, A.L.M. An optimal power flow based on safety barrier interior point method. Int. J. Electr. Power Energy Syst. 2015, 64, 977–985. [Google Scholar] [CrossRef]
- Davoodi, E.; Babaei, E.; Mohammadi-ivatloo, B. An efficient covexified SDP model for multi-objective optimal power flow. Int. J. Electr. Power Energy Syst. 2018, 102, 254–264. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, S.; Tang, Q.; Zhou, Y.; Zeng, T. An improved NSGA-III integrating adaptive elimination strategy to solution of many-objective optimal power flow problems. Energy 2019, 172, 945–957. [Google Scholar] [CrossRef]
- Naderi, E.; Pourakbari-Kasmaei, M.; Abdi, H. An efficient particle swarm optimization algorithm to solve optimal power flow problem integrated with FACTS devices. Appl. Soft Comput. 2019, 80, 243–262. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Ghanbarian, M.M.; Gharibzadeh, M.; Vahed, A.A.; Narimani, M.R.; Jabbari, M.; Malekpour, A.R. Multi-objective optimal power flow considering the cost, emission, voltage deviation and power losses using multi-objective modified imperialist competitive algorithm. Energy 2014, 78, 276–289. [Google Scholar] [CrossRef]
- Ghasemi, M.; Ghavidel, S.; Akbari, E.; Vahed, A.A. Solving nonlinear, non-smooth and non-convex optimal power flow problems using chaotic invasive weed optimization algorithms based on chaos. Energy 2014, 73, 340–353. [Google Scholar] [CrossRef]
- Elattar, E.E.; ElSayed, S.K. Modified JAYA algorithm for optimal power flow incorporating renewable energy sources considering the cost, emission, power loss and voltage profile improvement. Energy 2019, 178, 598–609. [Google Scholar] [CrossRef]
- Niknam, T.M.; Narimani, R.; Jabbari, M.; Malekpour, A.R. A modified shuffle frog leaping algorithm for multi-objective optimal power flow. Energy 2011, 36, 6420–6432. [Google Scholar] [CrossRef]
- Nguyen, T.T. High performance social spider optimization algorithm for optimal power flow solution with single objective optimization. Energy 2019, 171, 218–240. [Google Scholar] [CrossRef]
- Bentouati, B.; Javaid, M.S.; Bouchekara, H.; El-Fergany, A.A. Optimizing performance attributes of electric power systems using chaotic salp swarm optimizer. Int. J. Manag. Sci. Eng. Manag. 2020, 15, 165–175. [Google Scholar] [CrossRef]
- Mahdad, B.; Srairi, K. Security constrained optimal power flow solution using new adaptive partitioning flower pollination algorithm. Appl. Soft Comput. 2016, 46, 501–522. [Google Scholar] [CrossRef]
- Kotb, M.F.; El-Fergany, A.A. Optimal power flow solution using moth swarm optimizer considering generating units prohibited zones and valve ripples. J. Electr. Eng. Technol. 2020, 15, 179–192. [Google Scholar] [CrossRef]
- Mandal, B.; Roy, P.K. Multi-objective optimal power flow using quasi-oppositional teaching learning based optimization. Appl. Soft Comput. 2014, 21, 590–606. [Google Scholar] [CrossRef]
- Shaheen, A.M.; Farrag, S.M.; El-Sehiemy, R.A. MOPF solution methodology. IET Gener. Transm. Distrib. 2017, 11, 570–581. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Hasanien, H.M. Single and multi-objective optimal power flow using grey wolf optimizer and differential evolution algorithms. Electr. Power Compon. Syst. 2015, 43, 1548–1559. [Google Scholar] [CrossRef]
- Daryani, N.; Hagh, M.T.; Teimourzadeh, S. Adaptive group search optimization algorithm for multi-objective optimal power flow problem. Appl. Soft Comput. 2016, 38, 1012–1024. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Hasanien, H.M. Tree-seed algorithm for solving optimal power flow problem in large-scale power systems incorporating validations and comparisons. Appl. Soft Comput. 2018, 64, 307–316. [Google Scholar] [CrossRef]
- Bhowmik, A.R.; Chakraborty, A.K. Solution of optimal power flow using non dominated sorting multi objective opposition based gravitational search algorithm. Int. J. Electr. Power Energy Syst. 2015, 64, 1237–1250. [Google Scholar] [CrossRef]
- He, X.; Wang, W.; Jiang, J.; Xu, L. An improved artificial bee colony algorithm and its application to multi-objective optimal power flow. Energies 2015, 8, 2412–2437. [Google Scholar] [CrossRef] [Green Version]
- Abido, M.A.; Ahmed, M.W. Multi-objective optimal power flow considering the system transient stability. IET Gener. Transm. Distrib. 2016, 10, 4213–4221. [Google Scholar] [CrossRef]
- Rahmani, S.; Amjady, N. Enhanced goal attainment method for solving multi-objective security-constrained optimal power flow considering dynamic thermal rating of lines. Appl. Soft Comput. 2019, 77, 41–49. [Google Scholar] [CrossRef]
- Galvani, S.; Marjani, S.R. Optimal power flow considering predictability of power systems. Electr. Power Syst. Res. 2019, 171, 66–73. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H.; Chaib, A.E.; Abido, M.; El-Sehiemy, R.A. Optimal power flow using an Improved Colliding Bodies Optimization algorithm. Appl. Soft Comput. 2016, 42, 119–131. [Google Scholar] [CrossRef]
- Yuan, G.; Yang, W. Study on optimization of economic dispatching of electric power system based on hybrid intelligent algorithms (PSO and AFSA). Energy 2019, 183, 926–935. [Google Scholar] [CrossRef]
- Medina, M.A.; Das, S.; Coello, C.A.C.; Ramirez, J.M. Decomposition-based modern meta-heuristic algorithms for multi-objective optimal power flow-A comparative study. Eng. Appl. Artif. Intell. 2014, 32, 10–20. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, B.; Wang, P.; Liang, J.; Lei, X. Multi-objective optimal power flow based on improved strength Pareto evolutionary algorithm. Energy 2017, 122, 70–82. [Google Scholar] [CrossRef]
- Biswas, P.P.; Suganthan, P.; Mallipeddi, R.; Amaratunga, G.A. Optimal power flow solutions using differential evolution algorithm integrated with effective constraint handling techniques. Eng. Appl. Artif. Intell. 2018, 68, 81–100. [Google Scholar] [CrossRef]
- Zhang, J.; Tang, Q.; Li, P.; Deng, D.; Chen, Y. A modified MOEA/D approach to the solution of multi-objective optimal power flow problem. Appl. Soft Comput. 2016, 47, 494–514. [Google Scholar] [CrossRef]
- Shaheen, A.M.; El-Sehiemy, R.A.; Farrag, S.M. Solving multiobjective optimal power flow problem via forced initialised differential evolution algorithm. IET Gener. Transm. Distrib. 2016, 10, 1634–1647. [Google Scholar] [CrossRef]
- Pulluri, H.; Naresh, R.; Sharma, V. An enhanced self-adaptive differential evolution based solution methodology for multiobjective optimal power flow. Appl. Soft Comput. 2017, 54, 229–245. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous space. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Das, S.; Mullick, S.S.; Suganthan, P.N. Recent advances in differential evolution–an updated survey. Swarm Evol. Comput. 2017, 27, 1–30. [Google Scholar] [CrossRef]
- Piotrowski, A.P. Review of differential evolution population size. Swarm Evol. Comput. 2017, 32, 1–24. [Google Scholar] [CrossRef]
- El-Fergany, A.A.; Hasanien, H.M. Salp swarm optimizer to solve optimal power flow comprising voltage stability analysis. Neural Comput. Appl. 2020, 32, 5267–5283. [Google Scholar] [CrossRef]
- Reynoso-Meza, G. Controller Tuning by Means of Evolutionary Multiobjective Optimization: A Holistic Multiobjective Optimization Design Procedure. Ph.D. Thesis, Universitat Politècnica de València, València, Spain, 2014. [Google Scholar]
- Reynoso-Meza, G.; Sanchis, J.; Blasco, X.; Martínez, M. Design of continuous controllers using a multiobjective differential evolution algorithm with spherical pruning. Appl. Evol. Comput. 2010, 6024, 532–541. [Google Scholar] [CrossRef]
- Reynoso-Meza, G.; Sanchis, J.; Blasco, X.; Herrero, J.M. Multiobjective evolutionary algorithms for multivariable PI controller tuning. Expert Syst. Appl. 2012, 39, 7895–7907. [Google Scholar] [CrossRef] [Green Version]
- Reynoso-Meza, G.; Sanchis, J.; Blasco, X.; García-Nieto, S. Physical programming for preference driven evolutionary multi-objective optimization. Appl. Soft Comput. 2014, 24, 341–362. [Google Scholar] [CrossRef] [Green Version]
- MATLAB for Artificial Intelligence; Release 2020b; The Math Works Press: Boston, MA, USA, 2020. Available online: https://www.mathworks.com/ (accessed on 5 October 2020).
- Zimmerman, R.D.; Murillo-Sanchez, C.E. Matpower [Software]. Available online: https://matpower.org. (accessed on 30 June 2020). [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Wahab, N.I.A. A novel quasi-oppositional modified Jaya algorithm for multi-objective optimal power flow solution. Appl. Soft Comput. 2018, 65, 360–373. [Google Scholar] [CrossRef]
- Herbadji, O.; Slimanim, L.; Bouktir, T. Optimal power flow with four conflicting objective functions using multiobjective ant lion algorithm: A case study of the Algerian electrical network. Iran. J. Electr. Electron. Eng. 2019, 15, 94–113. [Google Scholar] [CrossRef]
- Chowdhury, N.; Pilo, F.; Pisano, G. Optimal energy storage system positioning and sizing with robust optimization. Energies 2020, 13, 512. [Google Scholar] [CrossRef] [Green Version]
- Othman, A.M.; El-Fergany, A.A. Adaptive virtual-inertia control and chicken swarm optimizer for frequency stability in power-grids penetrated by renewable energy sources. Neural Comput. Appl. 2021, 33, 2905–2918. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, Y.; Wang, J.; Cao, X.; Khan, M.A. Multi-period planning of multi-energy microgrid with multi-type uncertainties using chance constrained information gap decision method. Appl. Energy 2020, 260, 114188. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | 30-Bus | 118-Bus |
|---|---|---|
| Generators | 6 | 54 |
| Load bus | 21 | 99 |
| Branches | 41 | 186 |
| Tap settings transformers | 4 | 9 |
| Capacitive shunt compensators | 9 | 12 |
| Total Connected loads, MVA | 283.4 + j126.2 | 4242 + j1438 |
| Number of control variables | 25 | 129 |
| Formulation | Case # | ||||
|---|---|---|---|---|---|
| Two objectives | 1 | ✓ | ✓ | ✕ | ✕ |
| 2 | ✓ | ✕ | ✓ | ✕ | |
| 3 | ✓ | ✕ | ✕ | ✓ | |
| Three objectives | 4 | ✓ | ✓ | ✓ | ✕ |
| 5 | ✓ | ✓ | ✕ | ✓ | |
| 6 | ✓ | ✕ | ✓ | ✓ | |
| Four objectives | 7 | ✓ | ✓ | ✓ | ✓ |
| Controlling Parameter | Best Settings | |
|---|---|---|
| 30-Bus | 118-Bus | |
| 50 | 50 | |
| 0.5 | 0.7 | |
| 0.9 | 0.9 | |
| Number of arcs | ||
| Maximum Pareto solutions | 1500 | 5000 |
| No. of iterations | 1000 | 5000 |
| Control Variable | |||||||
|---|---|---|---|---|---|---|---|
| PG1 (MW) | 113.1667 | 177.6982 | 166.9543 | 108.0535 | 118.6186 | 166.5374 | 133.9738 |
| PG2 (MW) | 64.0182 | 41.8139 | 51.7267 | 64.7741 | 57.7370 | 47.3021 | 34.8274 |
| PG5 (MW) | 31.3178 | 22.9850 | 24.3110 | 34.0394 | 38.7262 | 26.7118 | 37.8803 |
| PG8 (MW) | 32.9767 | 21.8647 | 25.7964 | 34.6170 | 35.0000 | 10.0000 | 33.6451 |
| PG11 (MW) | 22.3965 | 15.6356 | 11.7609 | 20.4313 | 26.8753 | 11.5664 | 27.0341 |
| PG13 (MW) | 25.1334 | 12.4976 | 12.0000 | 26.9377 | 12.0000 | 30.3921 | 21.9287 |
| VG1 (pu) | 1.1000 | 1.0566 | 0.9810 | 0.9434 | 1.0317 | 1.0474 | 1.0249 |
| VG2 (pu) | 1.0444 | 0.9258 | 0.9875 | 1.0753 | 1.0577 | 0.9959 | 0.9991 |
| VG5 (pu) | 1.0249 | 0.9957 | 0.9246 | 0.9395 | 1.0307 | 0.9808 | 0.9570 |
| VG8 (pu) | 1.0062 | 0.9361 | 0.9098 | 0.9000 | 1.0432 | 0.9560 | 0.9915 |
| VG11 (pu) | 0.9223 | 1.0808 | 1.0308 | 1.0922 | 1.0185 | 1.0441 | 0.9951 |
| VG13 (pu) | 1.0238 | 1.0617 | 1.0963 | 0.9601 | 1.0344 | 0.9483 | 0.9026 |
| T6–9 | 90.00% | 101.25% | 110.00% | 110.00% | 97.50% | 103.75% | 97.50% |
| T6–10 | 105.00% | 101.25% | 101.25% | 96.25% | 92.50% | 103.75% | 107.50% |
| T4–12 | 98.75% | 105.00% | 102.50% | 110.00% | 90.00% | 108.75% | 105.00% |
| T27–28 | 93.75% | 96.25% | 110.00% | 96.25% | 90.00% | 90.00% | 102.50% |
| QC10 (MVAr) | 0.0000 | 3.3390 | 1.8112 | 1.7133 | 1.2975 | 0.0000 | 1.6315 |
| QC12 (MVAr) | 2.6816 | 1.8507 | 3.3804 | 0.6132 | 4.0053 | 5.0000 | 2.9783 |
| QC15 (MVAr) | 2.5428 | 4.2656 | 1.7458 | 4.6312 | 2.8315 | 2.7412 | 1.4480 |
| QC17 (MVAr) | 2.1897 | 4.6759 | 2.0146 | 1.7066 | 1.5406 | 5.0000 | 3.5829 |
| QC20 (MVAr) | 5.0000 | 0.0000 | 0.0000 | 5.0000 | 2.3553 | 0.7706 | 0.0000 |
| QC21 (MVAr) | 1.6192 | 0.0000 | 3.9538 | 3.7275 | 2.6113 | 0.0000 | 4.2438 |
| QC23 (MVAr) | 5.0000 | 0.5253 | 2.8481 | 2.1642 | 0.8609 | 0.1956 | 3.9938 |
| QC24 (MVAr) | 1.5333 | 3.5208 | 0.0000 | 4.3222 | 5.0000 | 2.1634 | 1.4571 |
| QC29 (MVAr) | 2.8376 | 0.7658 | 2.9261 | 0.9703 | 5.0000 | 4.6769 | 0.8602 |
| ($/h) | 837.8510 | 803.0290 | 804.7330 | 846.2620 | 844.0380 | 815.9640 | 840.9170 |
| 5.6093 | 9.0949 | 9.1493 | 5.4530 | 5.5572 | 9.1098 | 5.8894 | |
| (pu) | 0.8106 | 0.2799 | 0.7761 | 0.2498 | 1.3021 | 0.4916 | 0.4575 |
| 1/λi | 2.0447 | 1.9569 | 1.8245 | 1.9681 | 2.1704 | 2.1167 | 1.8790 |
| Elapsed time (s) | 59.0 | 58.0 | 57.0 | 58.4 | 58.1 | 58.6 | 55.50 |
| QG1 (MVAr) | −200 | 200 | 8.0712 | −10.9857 | −7.5976 | 2.6806 | 11.2260 | −10.8816 | −1.3888 |
| QG2 (MVAr) | −20 | 100 | 22.5222 | 28.7441 | 23.9599 | 7.5863 | 29.6632 | 21.4916 | 23.6488 |
| QG5 (MVAr) | −15 | 80 | 22.5225 | 22.6871 | 20.7621 | 16.0374 | 20.0417 | 19.9615 | 16.8297 |
| QG8 (MVAr) | −15 | 60 | 20.1239 | 8.8863 | −2.1677 | −9.2505 | 20.9694 | 6.7302 | 1.0296 |
| QG11 (MVAr) | −10 | 50 | 5.0564 | 28.4858 | 45.5612 | 40.5390 | 12.3456 | 34.1309 | 24.7763 |
| QG13 (MVAr) | −15 | 60 | 15.3335 | 34.9163 | 37.1135 | 42.7452 | −6.0118 | 39.9768 | 35.7466 |
| Method | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
($/h) | ($/h) | (pu) | ($/h) | 1/λi | ($/h) | (pu) | ||||
| SpDEA | 837.85 | 5.61 | 803.03 | 0.279 | 804.73 | 1.83 | 846.26 | 5.45 | 0.250 | |
| MODE | 821.18 | 6.08 | 801.59 | 0.222 | 802.061 | 1.97 | 818.28 | 6.58 | 0.261 | |
| MJaya [49] | 827.91 | 5.80 | ✕ | ✕ | ✕ | ✕ | ✕ | ✕ | ✕ | |
| MOALO [50] | 826.46 | 5.77 | 803.06 | 0.379 | ✕ | ✕ | ✕ | ✕ | ✕ | |
($/h) | 1/λi | ($/h) | (pu) | 1/λi | ($/h) | (pu) | 1/λi | |||
| SpDEA | 844.04 | 5.56 | 2.170 | 815.96 | 0.492 | 2.117 | 840.92 | 5.89 | 0.458 | 1.879 |
| MODE | 818.001 | 7.24 | 1.822 | 811.78 | 0.300 | 1.911 | 819.02 | 6.90 | 0.297 | 1.932 |
| Variable | Setting | Max | Variable | Setting | Max | Variable | Setting | Max | |
|---|---|---|---|---|---|---|---|---|---|
| 98.5129 | 100.0 | ) | 18.4023 | 100.0 | (pu) | 1.0611 | 1.10 | ||
| PG04 (MW) | 0.0000 | 100.0 | ) | 54.8394 | 100.0 | (pu) | 0.9841 | 1.10 | |
| PG06 (MW) | 100.0000 | 100.0 | ) | 0.0000 | 100.0 | 1.0121 | 1.10 | ||
| PG08 (MW) | 23.0988 | 100.0 | ) | 68.9143 | 100.0 | (pu) | 1.0157 | 1.10 | |
| PG10 (MW) | 177.6589 | 550.0 | ) | 0.0000 | 136.0 | 1.0678 | 1.10 | ||
| PG12 (MW) | 42.8185 | 185.0 | ) | 69.3657 | 100.0 | 0.9941 | 1.10 | ||
| PG15 (MW) | 28.2670 | 100.0 | ) | 67.3342 | 100.0 | 0.9000 | 1.10 | ||
| PG18 (MW) | 83.6450 | 100.0 | ) | 0.0000 | 100.0 | 1.0543 | 1.10 | ||
| PG19 (MW) | 27.0238 | 100.0 | (pu) | 1.0463 | 1.10 | 0.9646 | 1.10 | ||
| PG24 (MW) | 17.0881 | 100.0 | (pu) | 1.0600 | 1.10 | 0.9433 | 1.10 | ||
| PG25 (MW) | 138.4995 | 320.0 | (pu) | 1.0589 | 1.10 | 1.0516 | 1.10 | ||
| PG26 (MW) | 38.1873 | 414.0 | (pu) | 0.9462 | 1.10 | 0.9853 | 1.10 | ||
| PG27 (MW) | 79.6290 | 100.0 | (pu) | 1.1000 | 1.10 | 1.0258 | 1.10 | ||
| PG31 (MW) | 14.7774 | 107.0 | (pu) | 0.9113 | 1.10 | 0.9119 | 1.10 | ||
| PG32 (MW) | 64.7293 | 100.0 | (pu) | 0.9419 | 1.10 | (pu) | 0.9721 | 1.10 | |
| PG34 (MW) | 66.3123 | 100.0 | (pu) | 0.9341 | 1.10 | 0.9759 | 1.10 | ||
| PG36 (MW) | 30.3050 | 100.0 | (pu) | 1.0307 | 1.10 | 110.00% | 110% | ||
| PG40 (MW) | 100.0000 | 100.0 | (pu) | 1.0146 | 1.10 | 103.75% | 110% | ||
| PG42 (MW) | 53.8052 | 100.0 | (pu) | 0.9731 | 1.10 | 102.50% | 110% | ||
| PG46 (MW) | 43.0222 | 119.0 | (pu) | 0.9711 | 1.10 | 93.75% | 110% | ||
| PG49 (MW) | 251.9802 | 304.0 | (pu) | 1.0389 | 1.10 | 102.50% | 110% | ||
| PG54 (MW) | 71.3719 | 148.0 | (pu) | 1.0407 | 1.10 | 105.00% | 110% | ||
| PG55 (MW) | 56.2296 | 100.0 | (pu) | 1.0353 | 1.10 | 90.00% | 110% | ||
| PG56 (MW) | 86.2878 | 100.0 | (pu) | 0.9687 | 1.10 | 90.00% | 110% | ||
| PG59 (MW) | 146.3078 | 255.0 | (pu) | 0.9392 | 1.10 | 106.25% | 110% | ||
| PG61 (MW) | 190.7961 | 260.0 | (pu) | 1.0458 | 1.10 | 4.4232 | 30 | ||
| PG62(MW) | 0.0000 | 100.0 | (pu) | 0.9000 | 1.10 | 12.7388 | 30 | ||
| PG65(MW) | 388.9586 | 491.0 | 0.9019 | 1.10 | 11.0013 | 30 | |||
| PG66 (MW) | 107.9369 | 492.0 | 0.9919 | 1.10 | 4.0472 | 30 | |||
| PG69 (MW) | 250.5058 | 805.2 | (pu) | 0.9883 | 1.10 | 15.6773 | 30 | ||
| PG70 (MW) | 62.3974 | 100.0 | 1.0700 | 1.10 | 2.9030 | 30 | |||
| PG72 (MW) | 46.3690 | 100.0 | 0.9721 | 1.10 | 15.9493 | 30 | |||
| PG73 (MW) | 19.6229 | 100.0 | 0.9482 | 1.10 | 25.4304 | 30 | |||
| PG74 (MW) | 47.0583 | 100.0 | 0.9289 | 1.10 | 23.0731 | 30 | |||
| PG76 (MW) | 64.7490 | 100.0 | 0.9536 | 1.10 | 10.7369 | 30 | |||
| PG77 (MW) | 54.1489 | 100.0 | 0.9628 | 1.10 | 8.8431 | 30 | |||
| PG80 (MW) | 308.8801 | 577.0 | 1.0304 | 1.10 | 0.0000 | 30 | |||
| PG85 (MW) | 4.4758 | 100.0 | (pu) | 1.0550 | 1.10 | Elapsed time (min) | 4.5 | ||
| PG87 (MW) | 12.2678 | 104.0 | 0.9344 | 1.10 | ($/h) | 140,700 | |||
| PG89 (MW) | 255.0659 | 707.0 | 0.9000 | 1.10 | 30.339 | ||||
| PG90 (MW) | 74.3701 | 100.0 | 0.9506 | 1.10 | 1.44273 | ||||
| PG91 (MW) | 39.3204 | 100.0 | 1.0810 | 1.10 | 1/λi | 0.252525 | |||
| PG92 (MW) | 31.5990 | 100.0 | 1.0081 | 1.10 | |||||
| PG99 (MW) | 30.0157 | 100.0 | 1.0907 | 1.10 | |||||
| PG100 (MW) | 130.2287 | 352.0 | 0.9479 | 1.10 | |||||
| PG103 (MW) | 35.1592 | 140.0 | 0.9526 | 1.10 | |||||
| Item | Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | Case 7 | |||
|---|---|---|---|---|---|---|---|---|---|---|
| SpMEA | MOALO | SpMEA | MOALO | SpMEA | SpMEA | MOALO | SpDEA | |||
| TFC ($/h) | 140,700 | 156,745 | 139,400 | 154,570 | 134,100 | 142,100 | 157,453 | 139,380 | 141,686 | 150,718 |
| 30.339 | 90.659 | 50.0982 | ✕ | 66.3373 | 38.8512 | 77,496 | 37.1432 | 56.9677 | 33.6933 | |
| TVD (pu) | 1.4427 | ✕ | 1.051 | 3.887 | 1.4763 | 1.161 | 2.5864 | 1.52995 | 1.37546 | 1.41465 |
| 1/λi | 0.252525 | ✕ | 0.252519 | ✕ | 0.252516 | 0.252519 | ✕ | 0.25253 | 0.252529 | 0.252516 |
| λi | 3.96001 | ✕ | 3.9601 | ✕ | 3.96014 | 3.9601 | ✕ | 3.95993 | 3.95994 | 3.96014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghoneim, S.S.M.; Kotb, M.F.; Hasanien, H.M.; Alharthi, M.M.; El-Fergany, A.A. Cost Minimizations and Performance Enhancements of Power Systems Using Spherical Prune Differential Evolution Algorithm Including Modal Analysis. Sustainability 2021, 13, 8113. https://doi.org/10.3390/su13148113
Ghoneim SSM, Kotb MF, Hasanien HM, Alharthi MM, El-Fergany AA. Cost Minimizations and Performance Enhancements of Power Systems Using Spherical Prune Differential Evolution Algorithm Including Modal Analysis. Sustainability. 2021; 13(14):8113. https://doi.org/10.3390/su13148113
Chicago/Turabian StyleGhoneim, Sherif S. M., Mohamed F. Kotb, Hany M. Hasanien, Mosleh M. Alharthi, and Attia A. El-Fergany. 2021. "Cost Minimizations and Performance Enhancements of Power Systems Using Spherical Prune Differential Evolution Algorithm Including Modal Analysis" Sustainability 13, no. 14: 8113. https://doi.org/10.3390/su13148113
APA StyleGhoneim, S. S. M., Kotb, M. F., Hasanien, H. M., Alharthi, M. M., & El-Fergany, A. A. (2021). Cost Minimizations and Performance Enhancements of Power Systems Using Spherical Prune Differential Evolution Algorithm Including Modal Analysis. Sustainability, 13(14), 8113. https://doi.org/10.3390/su13148113