
Optimal Load and Energy Management of Aircraft Microgrids Using Multi-Objective Model Predictive Control




Abstract
:1. Introduction
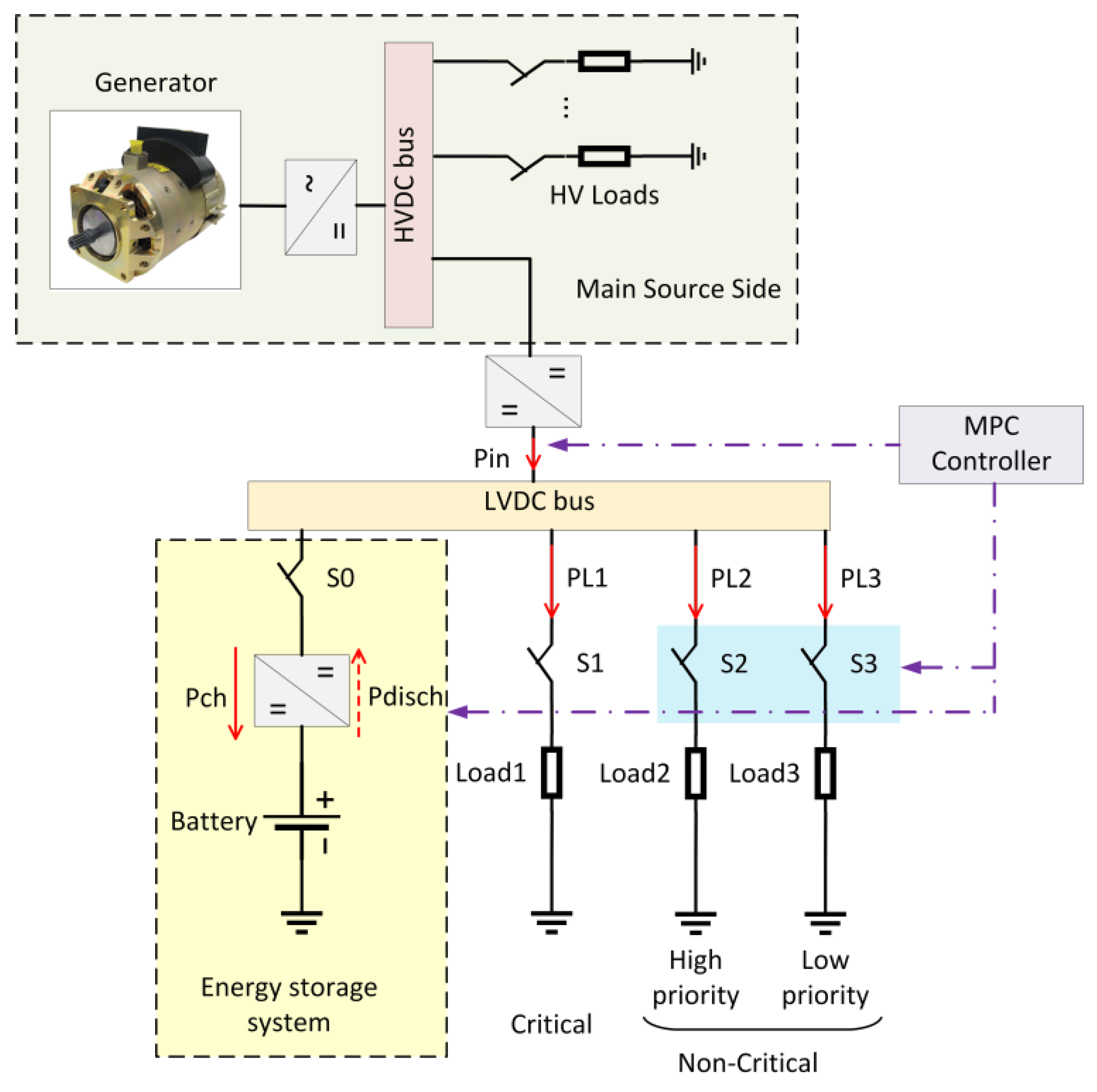
2. System Description
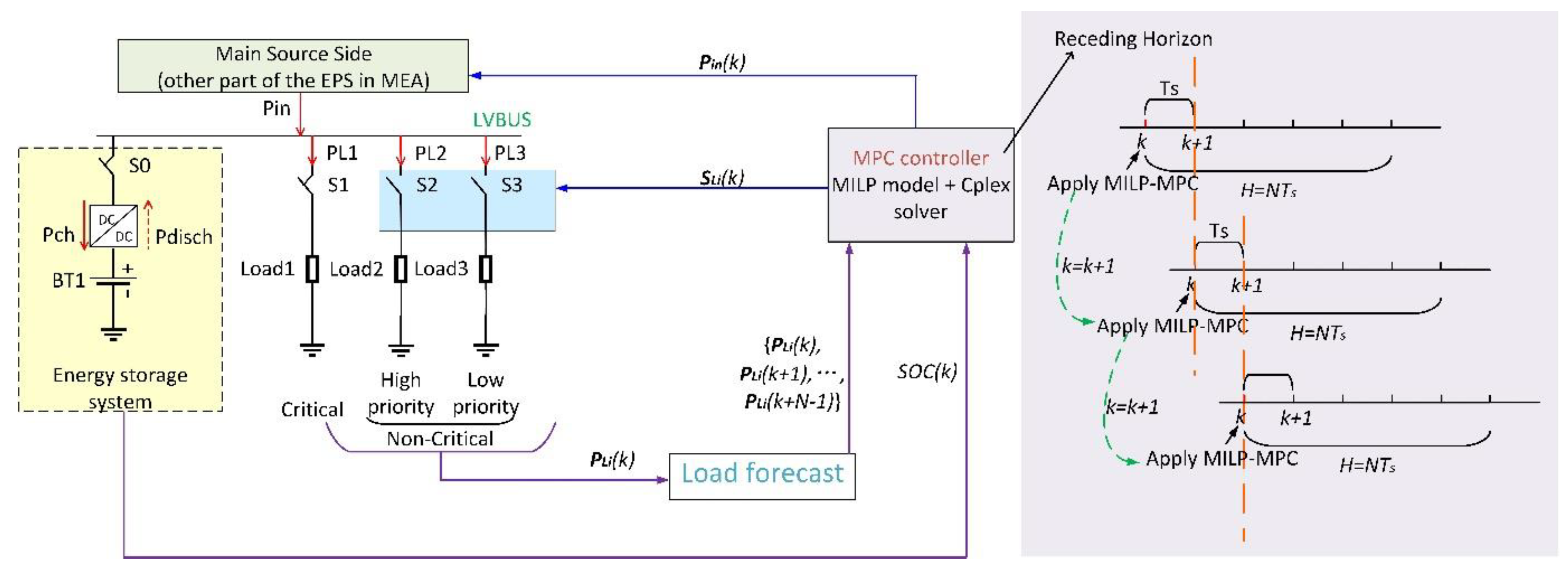
3. MILP-MPC Controller Framework
MILP-MPC Framework
| Algorithm 1. MILP-MPC controller. |
|
4. Formulation of Objectives and Constraints in MPC
4.1. Designing the Objective Functions
4.1.1. The First Proposed Objective Function (Obj1)
4.1.2. The Second Proposed Objective Function (Obj2)
4.1.3. The Third Proposed Objective Function (Obj3)
4.2. System Constraints
- (1)
- Power balance constraints
- (2)
- Storage dynamics
- (3)
- Hard and soft constraints of SOC
- (4)
- Charging/discharging mode constraints
- (5)
- Bounds of input power from the MS-side
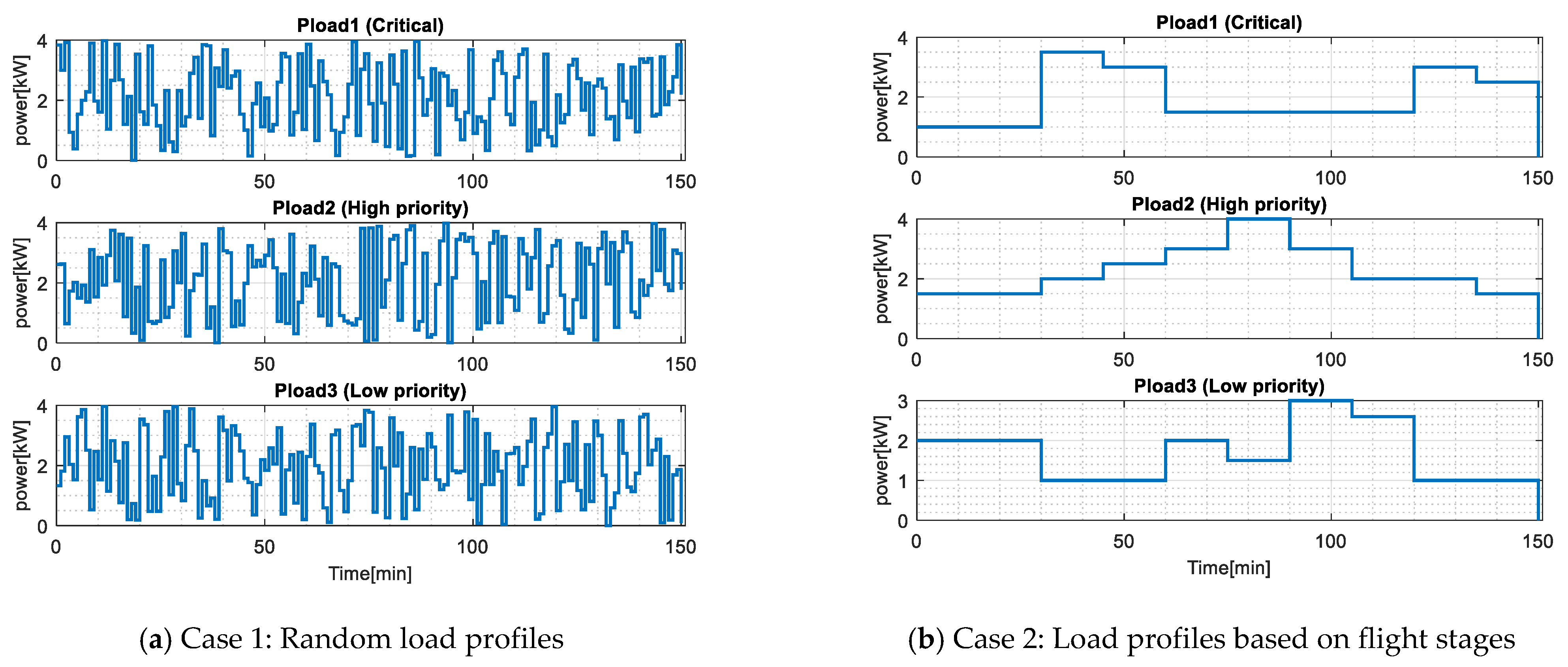
5. Evaluation for Various Objectives
5.1. Model Parameters
5.2. Evaluation Indices
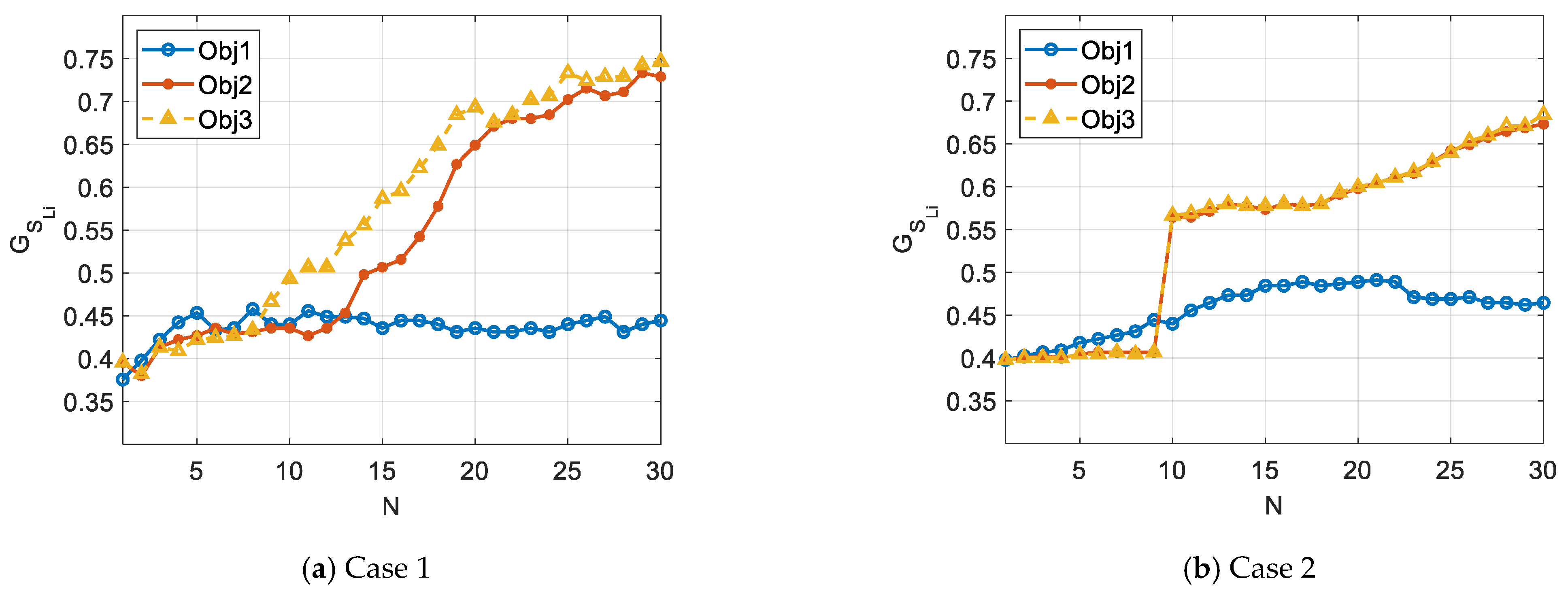
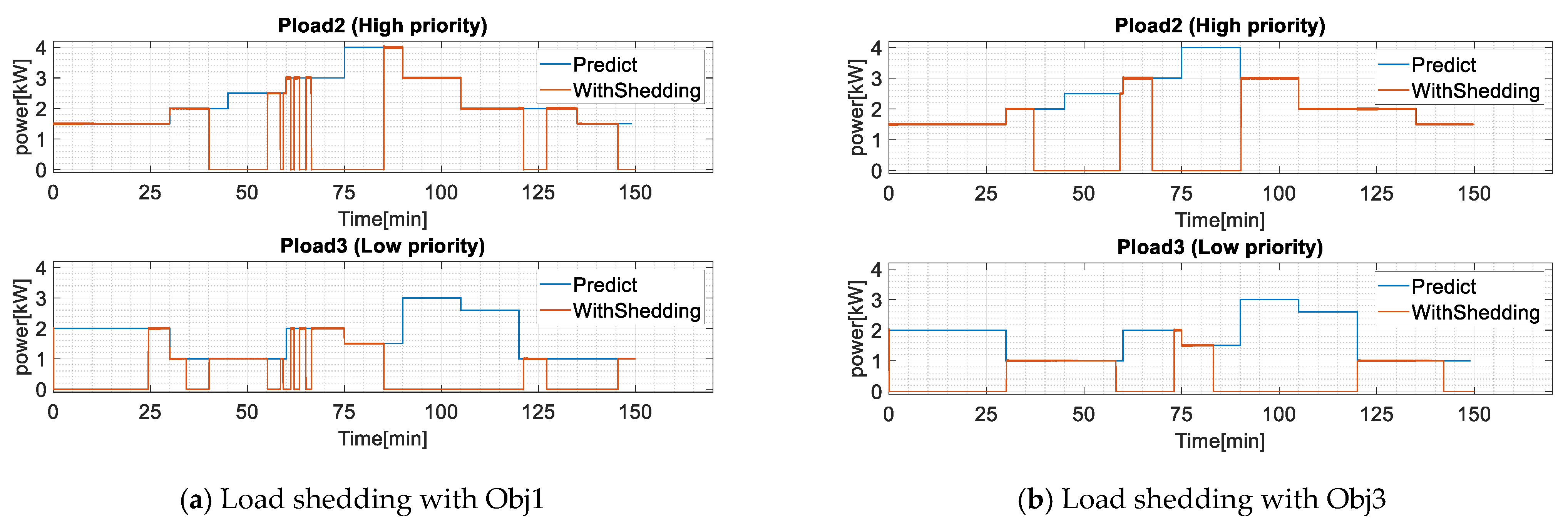
5.2.1. Load Shedding Index
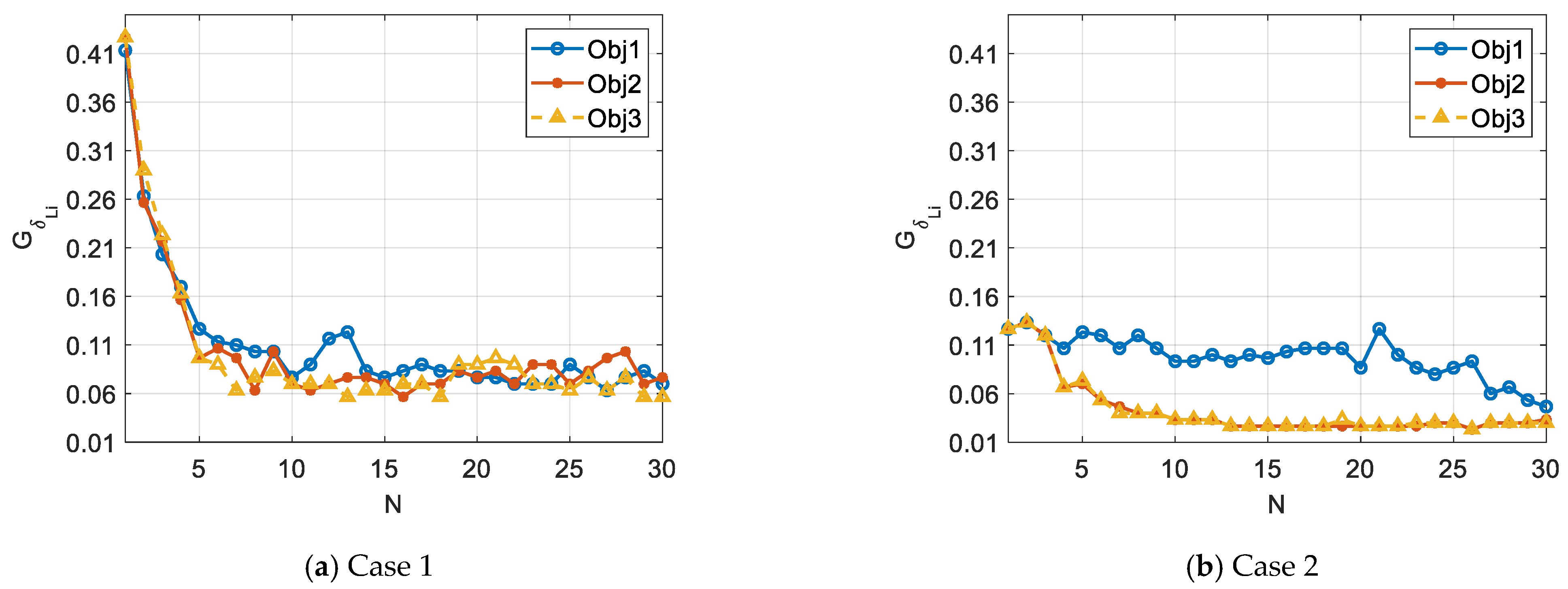
5.2.2. Contactor Status Change Index
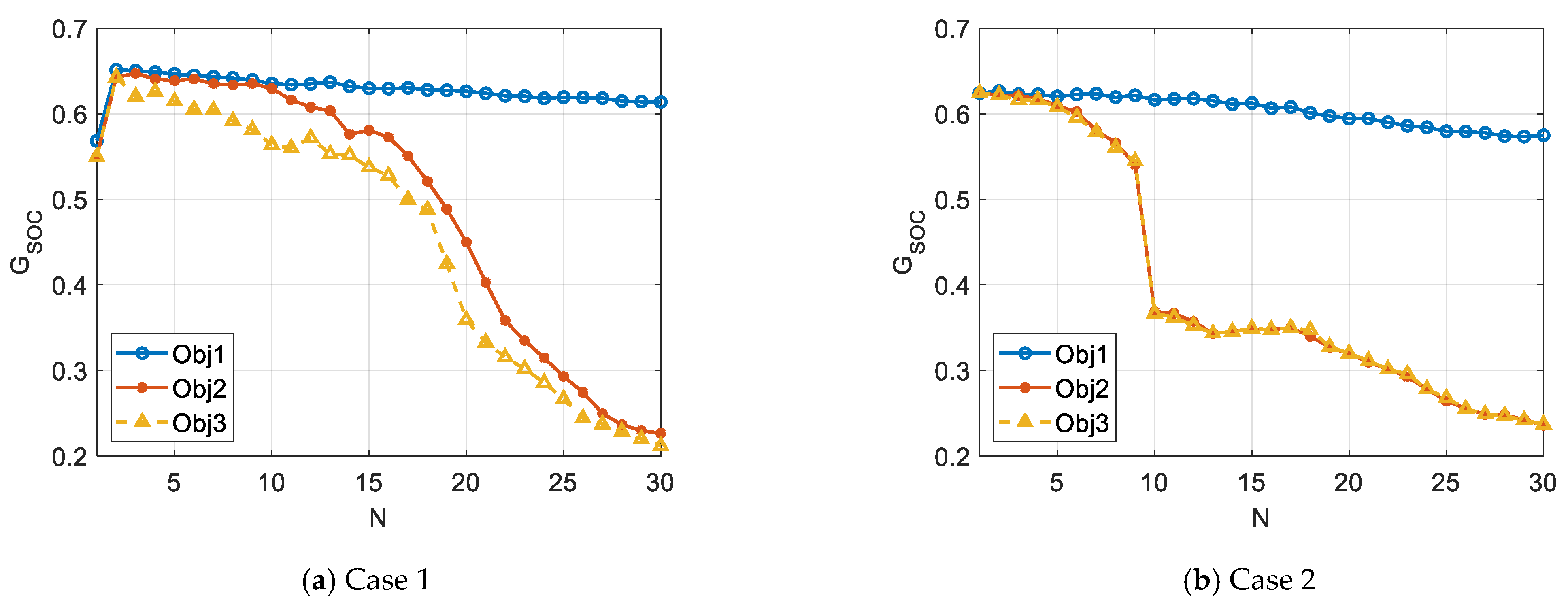
5.2.3. Battery Energy Storage Level Index
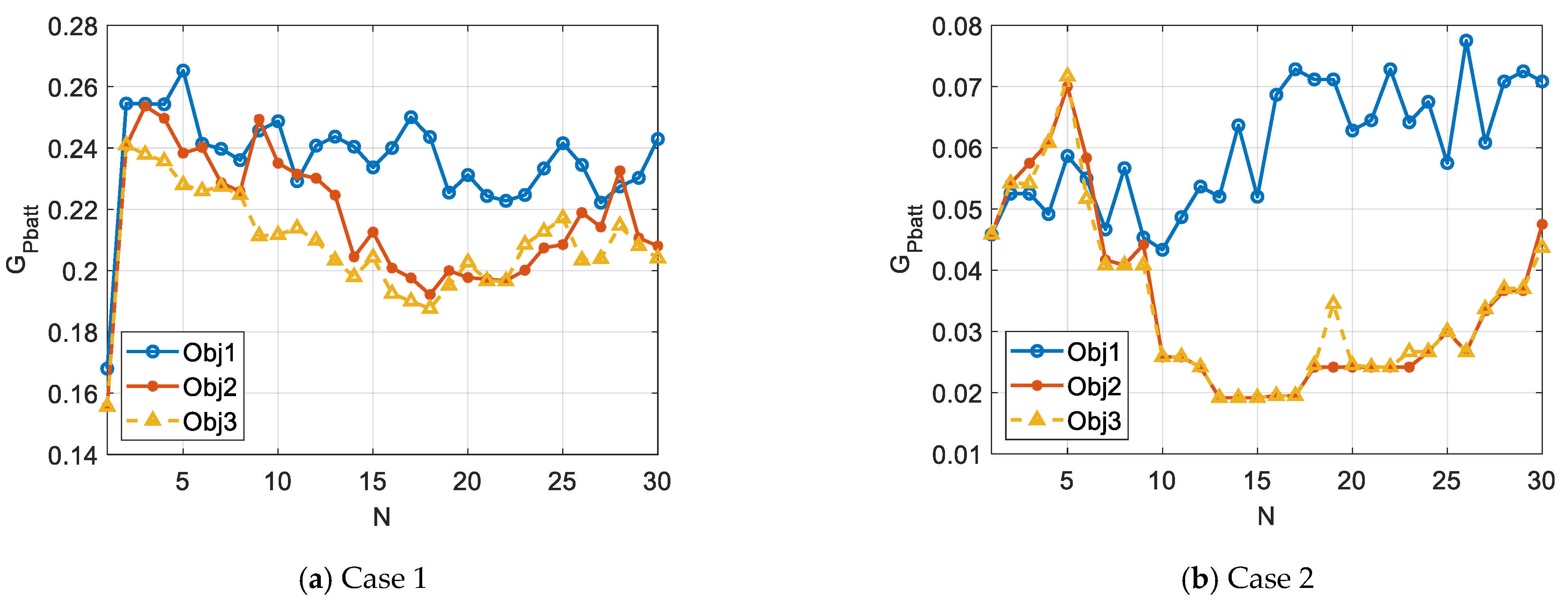
5.2.4. Battery Power Change Index
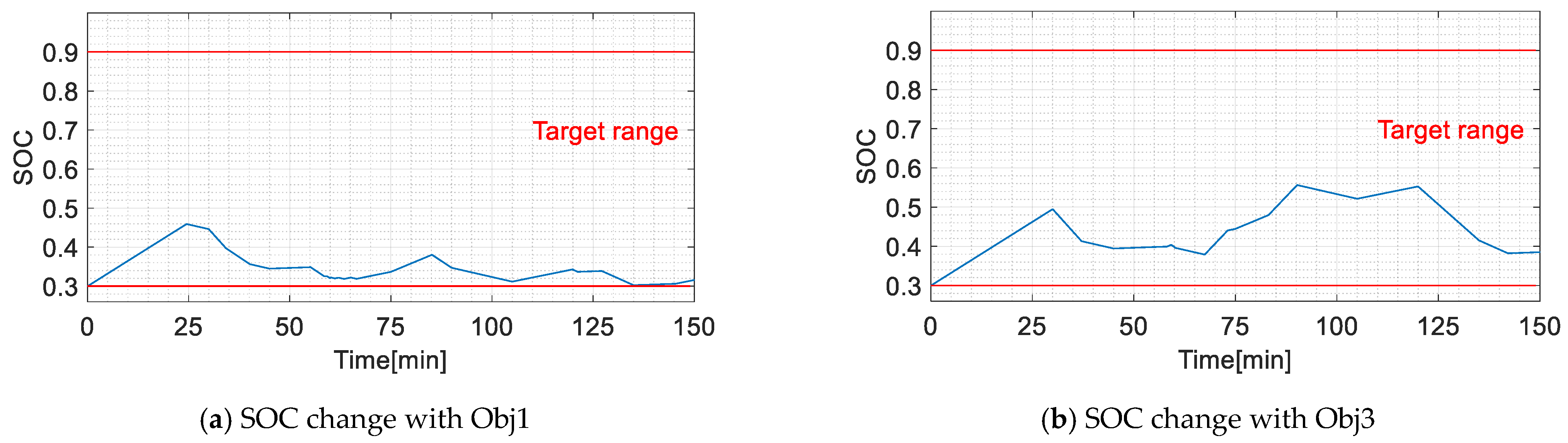
5.2.5. SOC Target Range Index
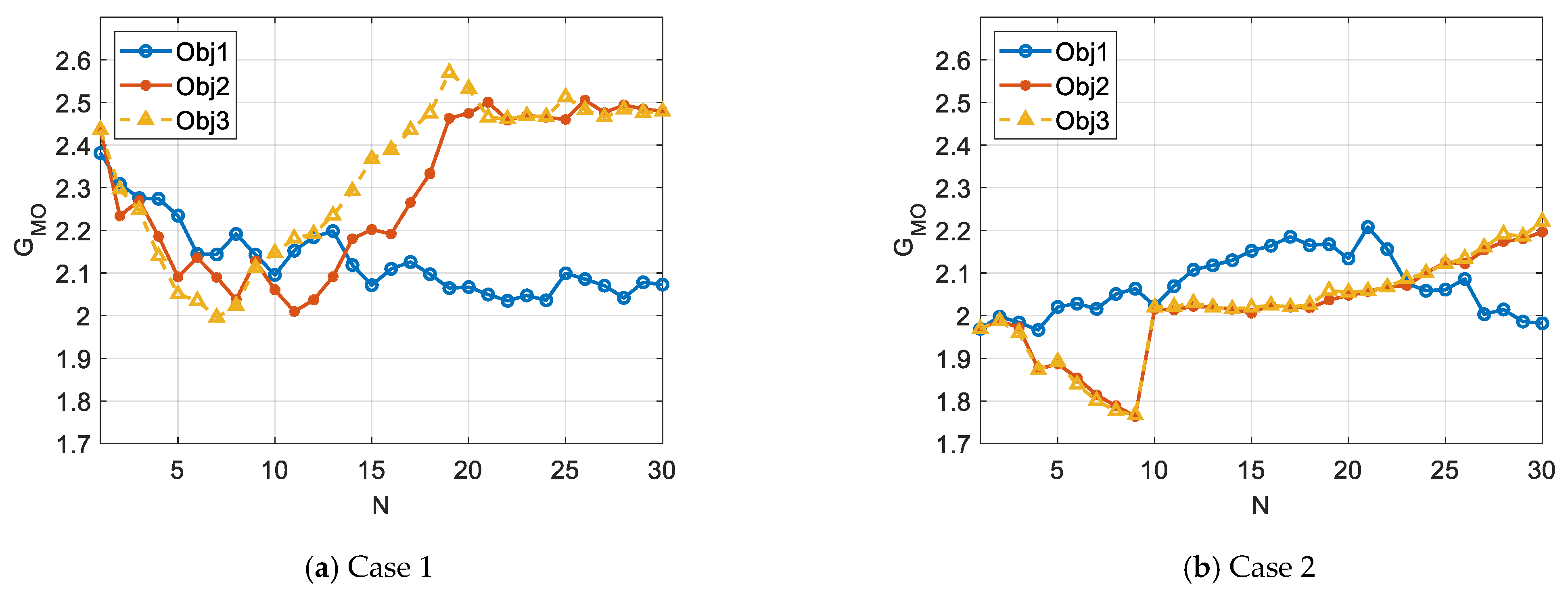
5.2.6. Index for Multi-Objective Problem
5.3. Discussion
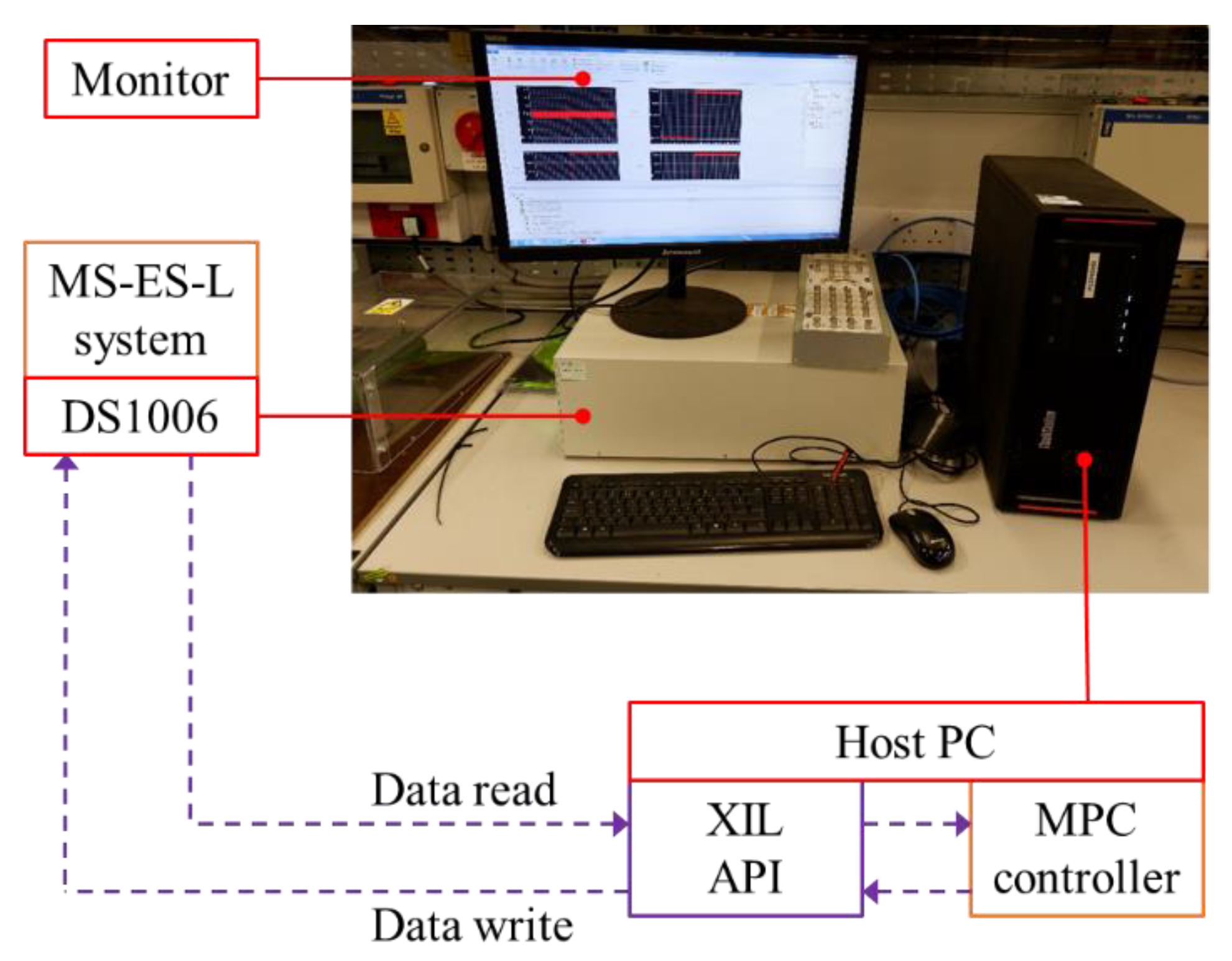
6. Real-Time Experiment
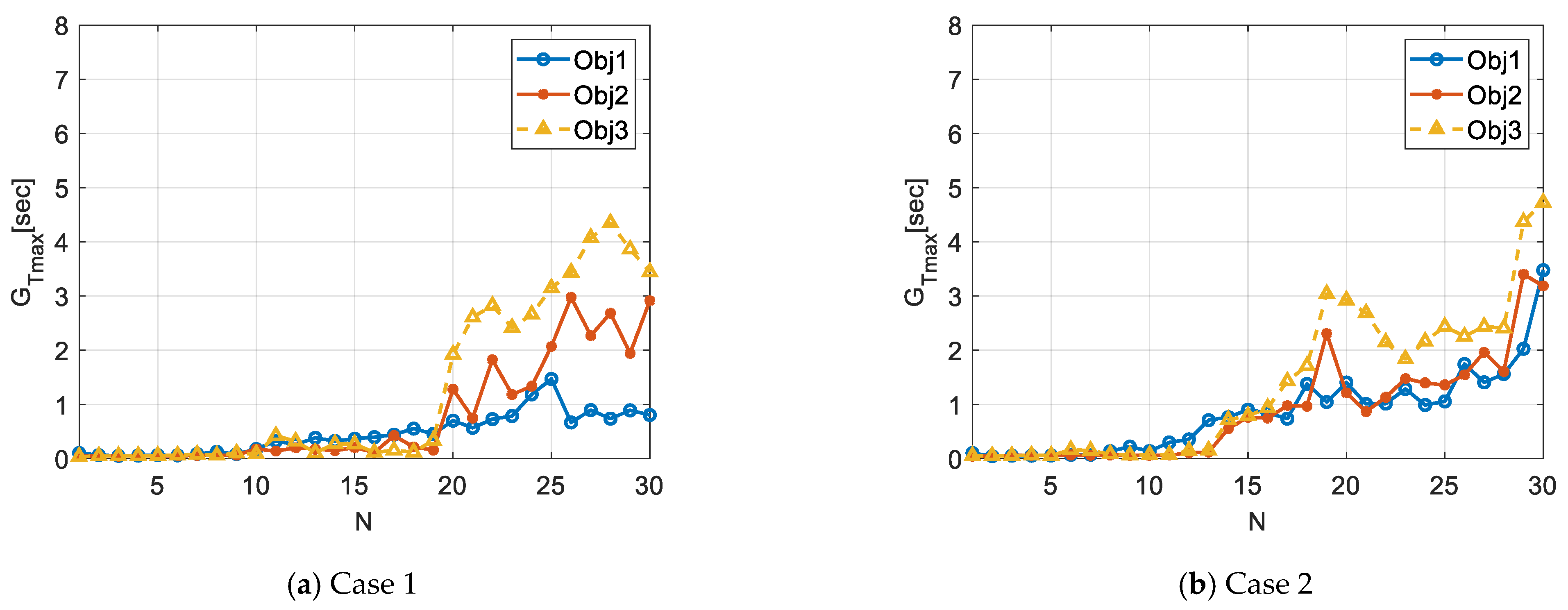
6.1. Computational Time Analysis
- (1)
- A 1-min sample time can provide the controller with enough time to obtain the measured status and updated load prediction, complete the optimization, and send the control signals to the system.
- (2)
- The proposed MPC method is mainly designed for satisfying the long-term battery SOC and load management requirements in the high-level control system. Since the SOC and average loads will not change very much in a few seconds, the MPC controller would not be required to update the control references frequently in small time intervals in the order of seconds. On the other hand, if the MPC is required to run every few seconds, to update the reference to cope with transients, the battery power and loads might change with every load fluctuation, which might cause instability in the system. In fact, instead of using MPC with long-term operating goals to act fast in response to the transient load changes, another real-time controller is usually added to the system at a lower control level, which will respond to the transient issues. This is the future work of the authors that will be presented in the future work discussion.
6.2. Real-Time Test
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Buticchi, G.; Bozhko, S.; Liserre, M.; Wheeler, P.; Al-Haddad, K. On-Board Microgrids for the More Electric Aircraft—Technology Review. IEEE Trans. Ind. Electron. 2018, 66, 5588–5599. [Google Scholar] [CrossRef] [Green Version]
- Damiano, A.; Porru, M.; Salimbeni, A.; Serpi, A.; Castiglia, V.; Di Tommaso, A.O.; Miceli, R.; Schettino, G. Batteries for Aerospace: A Brief Review. In Proceedings of the 2018 AEIT International Annual Conference, Bari, Italy, 3–5 October 2018; Volume 217. [Google Scholar] [CrossRef]
- Spagnolo, C.; Sumsurooah, S.; Hill, C.I.; Bozhko, S. Finite state machine control for aircraft electrical distribution system. J. Eng. 2018, 2018, 506–511. [Google Scholar] [CrossRef]
- Spagnolo, C.; Sumsurooah, S.; Hill, C.I.; Bozhko, S. Smart controller design for safety operation ofthe MEA electrical distribution system. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; Volume 1, pp. 5778–5785. [Google Scholar]
- Spagnolo, C.; Sumsurooah, S.; Bozkho, S. Advanced smart grid power distribution system for More Electric Aircraft application. In Proceedings of the 2019 International Conference on Electrotechnical Complexes and Systems (ICOECS), Ufa, Russia, 21–25 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Chaouachi, A.; Kamel, R.M.; Andoulsi, R.; Nagasaka, K. Multiobjective Intelligent Energy Management for a Microgrid. IEEE Trans. Ind. Electron. 2013, 60, 1688–1699. [Google Scholar] [CrossRef]
- Arcos-Aviles, D.; Pascual, J.; Marroyo, L.; Sanchis, P.; Guinjoan, F. Fuzzy Logic-Based Energy Management System Design for Residential Grid-Connected Microgrids. IEEE Trans. Smart Grid 2016, 9, 530–543. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Saudemont, C.; Robyns, B.; Meuret, R. Comparison of different DC voltage supervision strategies in a local Power Distribution System of More Electric Aircraft. Math. Comput. Simul. 2010, 81, 263–276. [Google Scholar] [CrossRef]
- Motapon, S.N.; Dessaint, L.-A.; Al-Haddad, K. A Comparative Study of Energy Management Schemes for a Fuel-Cell Hybrid Emergency Power System of More-Electric Aircraft. IEEE Trans. Ind. Electron. 2013, 61, 1320–1334. [Google Scholar] [CrossRef]
- Panday, A.; Bansal, O.H. Energy management strategy for hybrid electric vehicles using genetic algorithm. J. Renew. Sustain. Energy. 2016, 8, 15701. [Google Scholar] [CrossRef]
- Francisco, R.; Roncero-Clemente, C.; Lopes, R.; Martins, J. Intelligent Energy Storage Management System for Smart Grid Integration. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 6083–6087. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.-C.; Deng, D.-J.; Kuo, C.-C.; Liang, Y.-L. Optimal Charging Control of Energy Storage and Electric Vehicle of an Individual in the Internet of Energy With Energy Trading. IEEE Trans. Ind. Inform. 2017, 14, 2570–2578. [Google Scholar] [CrossRef]
- Ma, Y.; Yang, P.; Wang, Y.; Zhao, Z.; Zheng, Q. Optimal sizing and control strategy of islanded microgrid using PSO technique. In Proceedings of the 2014 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Hong Kong, China, 7–10 December 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Al-Saedi, W.; Lachowicz, S.W.; Habibi, D.; Bass, O. Power flow control in grid-connected microgrid operation using Particle Swarm Optimization under variable load conditions. Int. J. Electr. Power Energy Syst. 2013, 49, 76–85. [Google Scholar] [CrossRef]
- Pourmousavi, S.A.; Nehrir, M.H.; Colson, C.M.; Wang, C. Real-Time Energy Management of a Stand-Alone Hybrid Wind-Microturbine Energy System Using Particle Swarm Optimization. IEEE Trans. Sustain. Energy 2010, 1, 193–201. [Google Scholar] [CrossRef]
- Soares, A.; Gomes, A.; Antunes, C.H.; Oliveira, C. A Customized Evolutionary Algorithm for Multiobjective Management of Residential Energy Resources. IEEE Trans. Ind. Inform. 2016, 13, 492–501. [Google Scholar] [CrossRef]
- Logenthiran, T.; Srinivasan, D.; Shun, T.Z. Demand Side Management in Smart Grid Using Heuristic Optimization. IEEE Trans. Smart Grid 2012, 3, 1244–1252. [Google Scholar] [CrossRef]
- Shen, J.; Khaligh, A. A Supervisory Energy Management Control Strategy in a Battery/Ultracapacitor Hybrid Energy Storage System. IEEE Trans. Transp. Electrif. 2015, 1, 223–231. [Google Scholar] [CrossRef]
- Moreno, J.; Ortuzar, M.; Dixon, J. Energy-management system for a hybrid electric vehicle, using ultracapacitors and neural networks. IEEE Trans. Ind. Electron. 2006, 53, 614–623. [Google Scholar] [CrossRef]
- Parisio, A.; Rikos, E.; Tzamalis, G.; Glielmo, L. Use of model predictive control for experimental microgrid optimization. Appl. Energy 2014, 115, 37–46. [Google Scholar] [CrossRef]
- Parisio, A.; Rikos, E.; Glielmo, L. A Model Predictive Control Approach to Microgrid Operation Optimization. IEEE Trans. Control. Syst. Technol. 2014, 22, 1813–1827. [Google Scholar] [CrossRef]
- Parisio, A.; Wiezorek, C.; Kyntaja, T.; Elo, J.; Strunz, K.; Johansson, K.H. Cooperative MPC-Based Energy Management for Networked Microgrids. IEEE Trans. Smart Grid 2017, 8, 3066–3074. [Google Scholar] [CrossRef]
- Luna, A.C.; Diaz, N.L.; Graells, M.; Vasquez, J.C.; Guerrero, J.M. Mixed-Integer-Linear-Programming-Based Energy Management System for Hybrid PV-Wind-Battery Microgrids: Modeling, Design, and Experimental Verification. IEEE Trans. Power Electron. 2017, 32, 2769–2783. [Google Scholar] [CrossRef] [Green Version]
- Luna, A.C.; Meng, L.; Diaz, N.L.; Graells, M.; Vasquez, J.C.; Guerrero, J.M. Online Energy Management Systems for Microgrids: Experimental Validation and Assessment Framework. IEEE Trans. Power Electron. 2017, 33, 2201–2215. [Google Scholar] [CrossRef] [Green Version]
- Sockeel, N.; Shahverdi, M.; Mazzola, M. Impact of the State of Charge Estimation on Model Predictive Control Performance in a Plug-In Hybrid Electric Vehicle Accounting for Equivalent Fuel Consumption and Battery Capacity Fade. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 19–21 June 2019. [Google Scholar] [CrossRef]
- Sockeel, N.; Shi, J.; Shahverdi, M.; Mazzola, M. Sensitivity Analysis of the Vehicle Model Mass for Model Predictive Control Based Power Management System of a Plug-in Hybrid Electric Vehicle. In Proceedings of the 2018 IEEE Transportation Electrification Conference and Expo (ITEC), Long Beach, CA, USA, 13–15 June 2018; pp. 767–772. [Google Scholar] [CrossRef]
- Fu, Z.; Li, Z.; Tao, F. Adaptive energy management strategy for hybrid batteries/supercapacitors electrical vehicle based on model prediction control. Asian J. Control. 2019, 22, 2476–2486. [Google Scholar] [CrossRef]
- Gomozov, O.; Trovão, J.P.; Kestelyn, X.; Dubois, M.R. Adaptive Energy Management System Based on a Real-Time Model Predictive Control With Nonuniform Sampling Time for Multiple Energy Storage Electric Vehicle. IEEE Trans. Veh. Technol. 2016, 66, 5520–5530. [Google Scholar] [CrossRef]
- Fortenbacher, P.; Mathieu, J.L.; Andersson, G. Modeling, identification, and optimal control of batteries for power system applications. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Jiang, Z.; Raziei, S.A. Hierarchical Model Predictive Control for Real-Time Energy-Optimized Operation of Aerospace Systems. In Proceedings of the 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Indianapolis, IN, USA, 22–24 August 2019. [Google Scholar] [CrossRef]
- Seok, J.; Kolmanovsky, I.; Girard, A. Integrated/Coordinated Control of Aircraft Gas Turbine Engine and Electrical Power System: Towards Large Electrical Load Handling. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 3183–3189. [Google Scholar]
- Leite, J.P.S.P.; Voskuijl, M. Optimal energy management for hybrid-electric aircraft. Aircr. Eng. Aerosp. Technol. 2020, 92, 851–861. [Google Scholar] [CrossRef]
- Zhang, Y.; Peng, G.O.H.; Banda, J.K.; Dasgupta, S.; Husband, M.; Su, R.; Wen, C. An Energy Efficient Power Management Solution for a Fault-Tolerant More Electric Engine/Aircraft. IEEE Trans. Ind. Electron. 2018, 66, 5663–5675. [Google Scholar] [CrossRef]
- Maasoumy, M.; Nuzzo, P.; Iandola, F.; Kamgarpour, M.; Sangiovanni-Vincentelli, A.; Tomlin, C. Optimal load management system for Aircraft Electric Power distribution. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013; pp. 2939–2945. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Koeln, J.P. Hierarchical Multi-Timescale Energy Management for Hybrid-Electric Aircraft. In Proceedings of the Dynamic Systems and Control Conference, Pittsburgh, PA, USA, 4–7 October 2020. [Google Scholar] [CrossRef]
- Aksland, C.T.; Alleyne, A.G. Hierarchical model-based predictive controller for a hybrid UAV powertrain. Control. Eng. Pr. 2021, 115, 104883. [Google Scholar] [CrossRef]
- Wang, X.; Atkin, J.; Hill, C.; Bozhko, S. Power Allocation and Generator Sizing Optimisation of More-Electric Aircraft On-board Electrical Power during Different Flight Stages. In Proceedings of the 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS), Indianapolis, IN, USA, 22–24 August 2019. [Google Scholar] [CrossRef]
- Ni, K.; Liu, Y.; Mei, Z.; Wu, T.; Hu, Y.; Wen, H.; Wang, Y. Electrical and Electronic Technologies in More-Electric Aircraft: A Review. IEEE Access 2019, 7, 76145–76166. [Google Scholar] [CrossRef]
- Chen, J.; Wang, C.; Chen, J. Investigation on the Selection of Electric Power System Architecture for Future More Electric Aircraft. IEEE Trans. Transp. Electrif. 2018, 4, 563–576. [Google Scholar] [CrossRef]
- Seresinhe, R.; Lawson, C. Electrical load-sizing methodology to aid conceptual and preliminary design of large commercial aircraft. Proc. Inst. Mech. Eng. Part. G J. Aerosp. Eng. 2014, 229, 445–466. [Google Scholar] [CrossRef]
- Barzegar, A.; Su, R.; Wen, C.; Rajabpour, L.; Zhang, Y.; Gupta, A.; Gajanayake, C.; Lee, M.Y. Intelligent power allocation and load management of more electric aircraft. In Proceedings of the 2015 IEEE 11th International Conference on Power Electronics and Drive Systems, Sydney, Australia, 9–12 June 2015; pp. 533–538. [Google Scholar] [CrossRef]
- Elkazaz, M.; Sumner, M.; Naghiyev, E.; Pholboon, S.; Davies, R.; Thomas, D. A hierarchical two-stage energy management for a home microgrid using model predictive and real-time controllers. Appl. Energy 2020, 269, 115118. [Google Scholar] [CrossRef]
- IBM. IBM ILOG CPLEX Optimization Studio OPL Language User’s Manual. Version 12, Release 8. Available online: https://www.ibm.com/docs/en/SSSA5P_12.8.0/ilog.odms.studio.help/pdf/opl_languser.pdf (accessed on 1 October 2021).
- Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model Predictive Control (MPC) for Enhancing Building and HVAC System Energy Efficiency: Problem Formulation, Applications and Opportunities. Energies 2018, 11, 631. [Google Scholar] [CrossRef] [Green Version]
- Garche, J.; Jossen, A. Battery Management systems (BMS) for increasing battery life time. In Proceedings of the TELESCON 2000. Third International Telecommunications Energy Special Conference (IEEE Cat. No.00EX424), Dresden, Germany, 10 May 2000; pp. 85–88. [Google Scholar] [CrossRef]
- Wang, X.; Gao, Y.; Atkin, J.; Bozhko, S. Neural Network based Weighting Factor Selection of MPC for Optimal Battery and Load Management in MEA. In Proceedings of the 2020 23rd International Conference on Electrical Machines and Systems (ICEMS), Hamamatsu, Japan, 24–27 November 2020. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, J.; Yu, Y. Distributed power management with adaptive scheduling horizons for more electric aircraft. Int. J. Electr. Power Energy Syst. 2020, 126, 106581. [Google Scholar] [CrossRef]
- Australian Government Civil Aviation Safety Authority. Aircraft Electrical Load Analysis and Power Source Capacity; Australian Government Civil Aviation Safety Authority: Canberra, Australia, 2017.
- Behrooz, F.; Yusof, R.; Mariun, N.; Khairuddin, U.; Ismail, Z.H. Designing Intelligent MIMO Nonlinear Controller Based on Fuzzy Cognitive Map Method for Energy Reduction of the Buildings. Energies 2019, 12, 2713. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Cost Function Terms | ||
|---|---|---|---|
| k | Time intervals, k∈ℤ≥0 | JSLi | Cost function for minimizing total load shedding |
| H | Prediction horizon (s) | JδLi | Cost function for minimizing switching activities |
| Ts | Sampling time (s) | JPch | Cost function for maximining charging power |
| T | Total simulation time (s) | JPdisch | Cost function for minimizing discharging power |
| ηch/ηdisch | Battery charging/discharging efficiency | JΔ | Cost function for keeping SOC within the target range |
| Bcap | Battery capacity (kWh) | JSOC | Cost function for maximizing SOC to the upper bound |
| , | Maximum charging/discharging power (kW) | JPbatt | Cost function for minimizing battery power variations |
| LO/HI | Lower/upper bounds of the battery SOC target range | Weighting factors | |
| Maximum input power from the MS-side (kW) | wS | Weighting factor for JSLi | |
| The ith non-critical load power (kW) | wδ | Weighting factor for JδLi | |
| γLi | The priority of the ith non-critical load | wPch | Weighting factor for JPch |
| NLi | Total number of non-critical loads | wPdisch | Weighting factor for JPdisch |
| The ith critical load power (kW) | wΔ | Weighting factor for JΔ | |
| Continues Variables | wSOC | Weighting factor for JSOC | |
| Pin(k) | Input power from the MS-side (kW) | wPbatt | Weighting factor for JPbatt |
| Pch(k) | Battery charging power (kW) | Evaluation Indices | |
| Pdisch(k) | Battery discharging power (kW) | GSLi | Evaluation index for total load shedding |
| Pbatt(k) | Battery overall power (kW) | GδLi | Evaluation index for contactor status change |
| SOC(k) | Battery state of charge | GSOC | Evaluation index for battery energy storage level |
| ε(k) | Tolerance for lower bound of battery SOC | GPbatt | Evaluation index for battery power variations |
| ϑ(k) | Tolerance for upper bound of battery SOC | , | Evaluation index for SOC target range: upper and lower range bound correspondingly |
| Binary Variables | Weighting factors for multi-objective evaluation index | ||
| SLi(k) | Contactor connection status of the ith non-critical load | vS | Weight for GSLi |
| ζch(k) | Indicator for charging the battery | vδ | Weight for GδLi |
| ζdisch(k) | Indicator for discharging the battery | vSOC | Weight for GSOC |
| vPbatt | Weight for GPbatt | ||
| , | Weight for correspondingly | ||
| 4 kWh | 4 kW | ||
| 4 kW | 90% | ||
| 4 kW | SOC(0) | 0.3 |
| 5 | 34.7 | ||
| 16 | 1e5 | ||
| 2 | 5.1 | ||
| 3.1 in Obj1, 2.8 in Obj2 and Obj3 | |||
| 2.8 | 1.68 | ||
| 1 | 0.4 | ||
| 104 | 104 |
| Index | Best Obj with a Short Horizon | Best Obj with a Long Horizon | Key Features of Performance Tendency When Horizon Increases | Combinations for Best Performance |
|---|---|---|---|---|
| Load shedding | Obj2–Obj3 | Obj1 | 1. Performance of Obj1–Obj3 is better when a shorter horizon is applied (e.g., N < 10) 2. Performance of Obj2–Obj3 is reduced rapidly after the inflection point (N = 10) when horizon increases | Obj2–Obj3 with a short horizon (e.g., N < 10) |
| Contactor status change | Obj2–Obj3 | Obj2–Obj3 | 1. Before the inflection point (N = 5), the performance of Obj1–Obj3 is improved rapidly when the horizon increases 2. After the inflection point, the performance has few changes when the horizon increases | Obj2–Obj3 at and after the inflection point (N ≥ 5) |
| Battery energy storage level | Obj3 | Obj3 | 1. Performance of Obj1–Obj3 is better when a longer horizon is applied (e.g., N > 10) 2. Performance of Obj2–Obj3 is improved rapidly after the inflection point (N = 10) when horizon increases | Obj3 with a long horizon (e.g., N > 10) |
| Battery power change | Obj3 | Obj3 | 1. Before the inflection point (N = 13), the performance of Obj2–Obj3 is improved when the horizon increases 2. After the inflection point, the performance of Obj2–Obj3 is reduced when the horizon increases 3. Obj1 doesn’t show relativity to horizon changes | Obj2–Obj3 at inflection point (N = 13) |
| Multi-objective | Obj2–Obj3 | Obj1 | 1. Before the inflection point (N = 9), the performance of Obj2–Obj3 is improved when the horizon increases 2. After the inflection point, the performance of Obj2–Obj3 is reduced when the horizon increases 3. Obj1 requires a long horizon to improve the performance (e.g., N > 25) | Obj2–Obj3 at inflection point (N = 9) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Atkin, J.; Bazmohammadi, N.; Bozhko, S.; Guerrero, J.M. Optimal Load and Energy Management of Aircraft Microgrids Using Multi-Objective Model Predictive Control. Sustainability 2021, 13, 13907. https://doi.org/10.3390/su132413907
Wang X, Atkin J, Bazmohammadi N, Bozhko S, Guerrero JM. Optimal Load and Energy Management of Aircraft Microgrids Using Multi-Objective Model Predictive Control. Sustainability. 2021; 13(24):13907. https://doi.org/10.3390/su132413907
Chicago/Turabian StyleWang, Xin, Jason Atkin, Najmeh Bazmohammadi, Serhiy Bozhko, and Josep M. Guerrero. 2021. "Optimal Load and Energy Management of Aircraft Microgrids Using Multi-Objective Model Predictive Control" Sustainability 13, no. 24: 13907. https://doi.org/10.3390/su132413907
APA StyleWang, X., Atkin, J., Bazmohammadi, N., Bozhko, S., & Guerrero, J. M. (2021). Optimal Load and Energy Management of Aircraft Microgrids Using Multi-Objective Model Predictive Control. Sustainability, 13(24), 13907. https://doi.org/10.3390/su132413907