
Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture



Abstract
:1. Introduction
- A Mask R-CNN based instance segmentation system for precise leaf and rust identification on apple trees from RGB images;
- Manually annotated segmentation maps for a subset of the Plant Pathology Challenge 2020 data set;
- Benchmark evaluations of the proposed system for object detection, segmentation and disease detection accuracy, on the newly annotated images.
2. Related Works
2.1. Object Detection and Segmentation
2.2. Convolutional Architectures
2.3. Alternative Architectures
2.4. Agricultural Applications
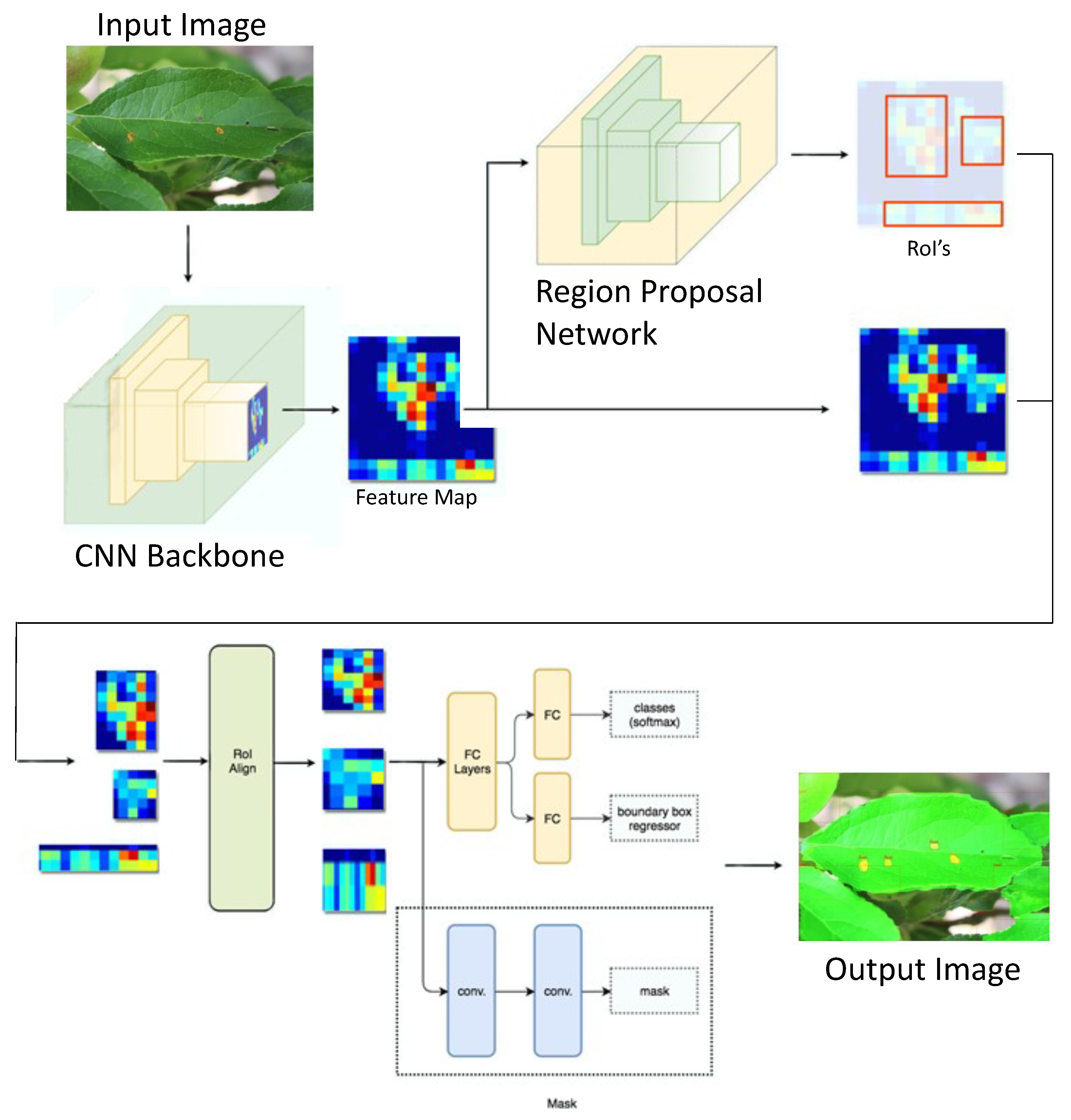
3. Proposed System
3.1. Mask R-CNN
3.2. Feature Extraction Backbone and Feature Pyramid Network
3.3. Plant Data Set and Model Training
4. Results
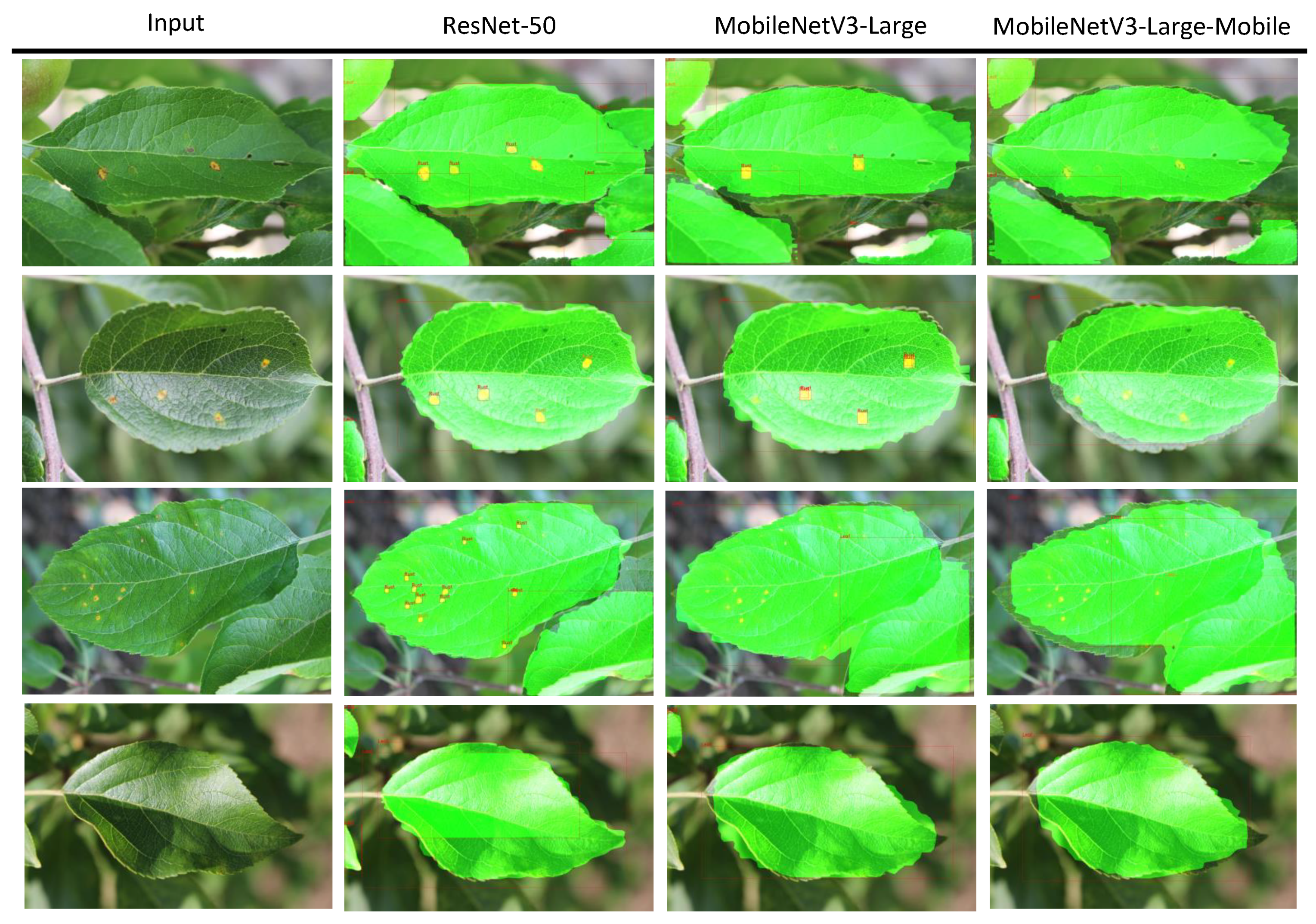
4.1. Object Detection and Instance Segmentation Evaluation
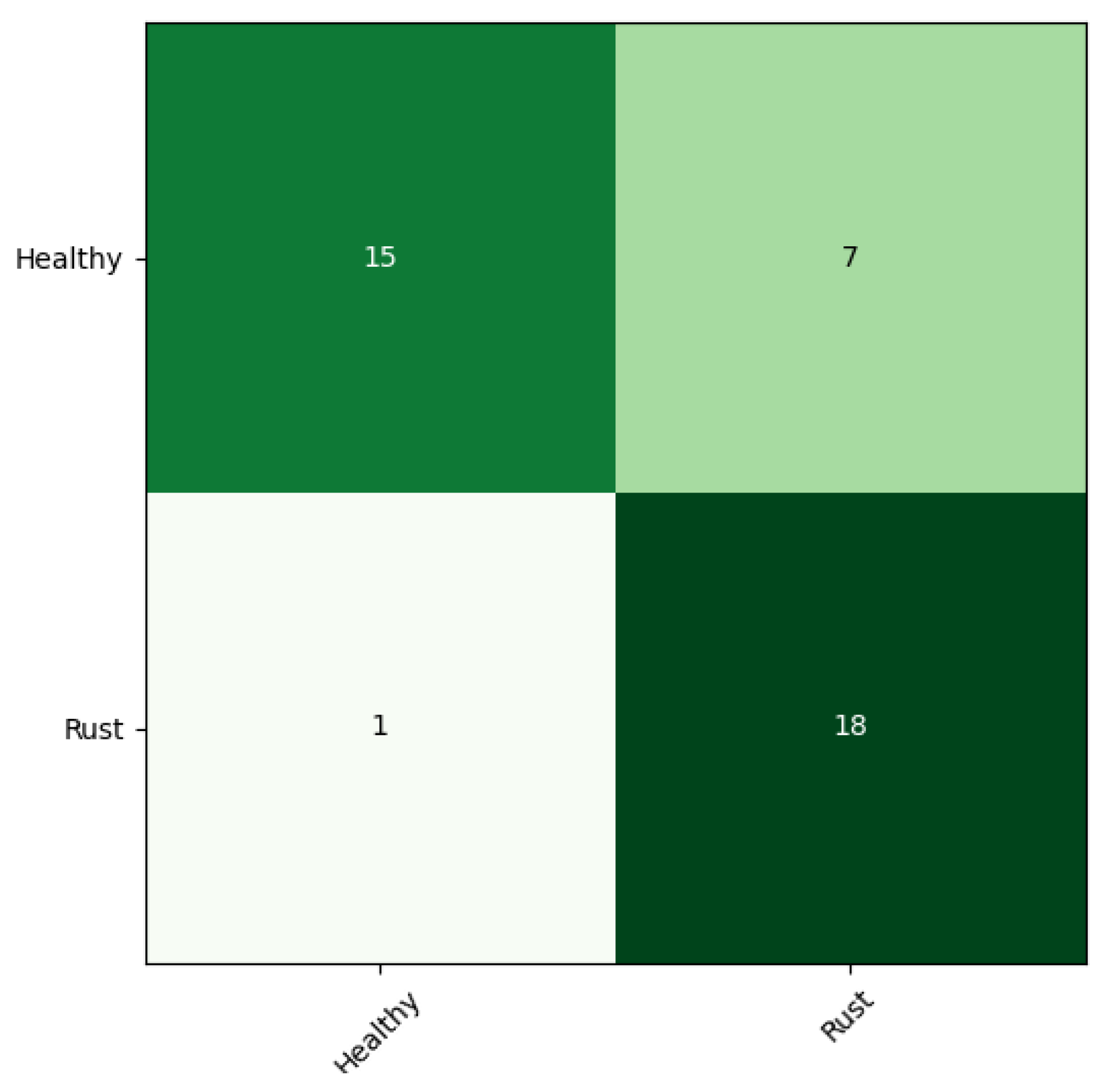
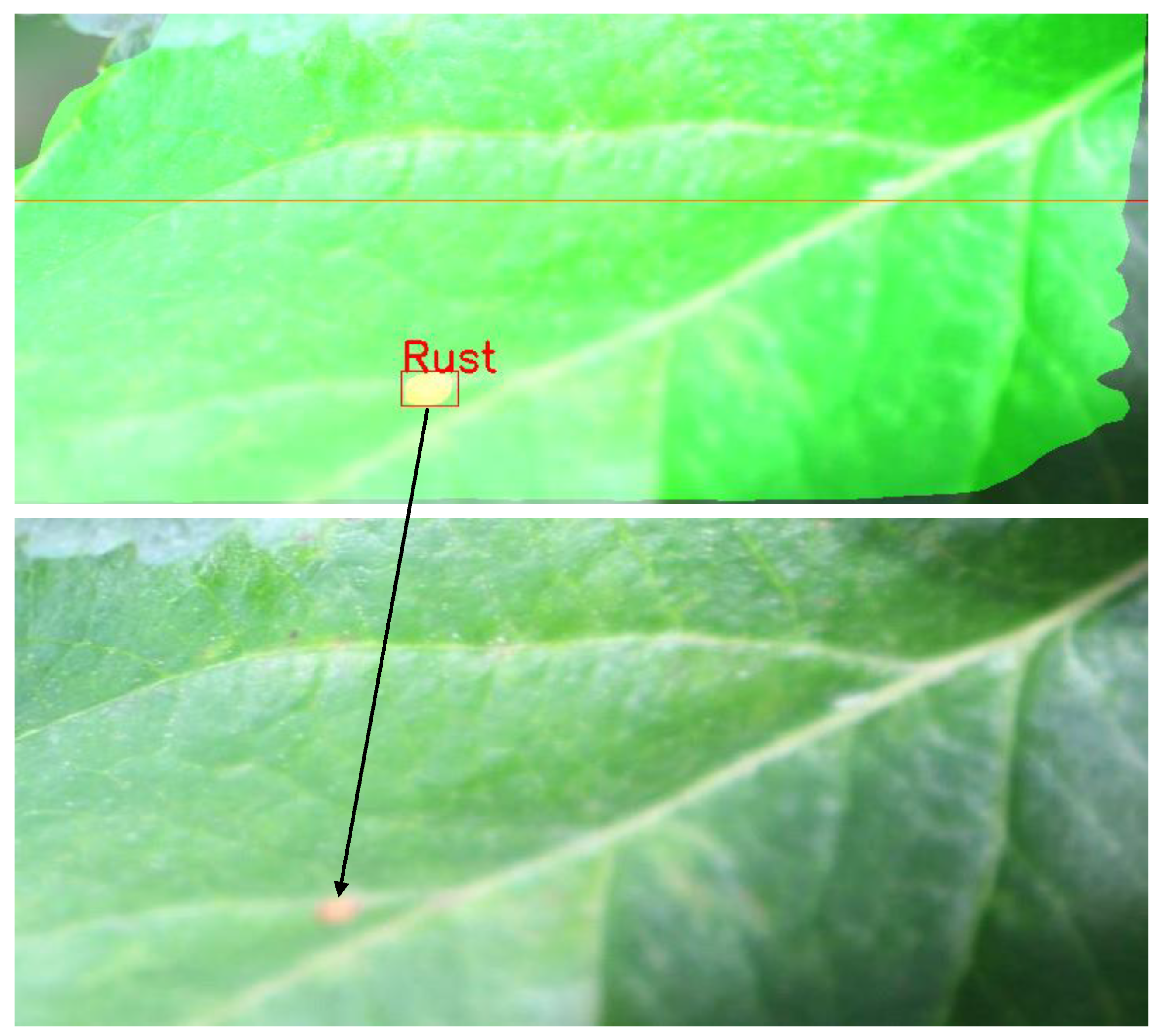
4.2. Disease Detection
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Linhart, C.; Niedrist, G.H.; Nagler, M.; Nagrani, R.; Temml, V.; Bardelli, T.; Wilhalm, T.; Riedl, A.; Zaller, J.G.; Clausing, P.; et al. Pesticide contamination and associated risk factors at public playgrounds near intensively managed apple and wine orchards. Environ. Sci. Eur. 2019, 31, 28. [Google Scholar] [CrossRef] [Green Version]
- Simon, S.; Brun, L.; Guinaudeau, J.; Sauphanor, B. Pesticide use in current and innovative apple orchard systems. Agron. Sustain. Dev. 2011, 31, 541–555. [Google Scholar] [CrossRef] [Green Version]
- Creech, C.F.; Henry, R.S.; Werle, R.; Sandell, L.D.; Hewitt, A.J.; Kruger, G.R. Performance of Postemergence Herbicides Applied at Different Carrier Volume Rates. Weed Technol. 2015, 29, 611–624. [Google Scholar] [CrossRef]
- Aktar, W.; Sengupta, D.; Chowdhury, A. Impact of pesticides use in agriculture: Their benefits and hazards. Interdiscip. Toxicol. 2009, 2, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lefebvre, M.; Langrell, S.R.; Gomez-y-Paloma, S. Incentives and policies for integrated pest management in Europe: A review. Agron. Sustain. Dev. 2015, 35, 27–45. [Google Scholar] [CrossRef]
- Dara, S.K. The New Integrated Pest Management Paradigm for the Modern Age. J. Integr. Pest Manag. 2019, 10, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Partel, V.; Kakarla, S.C.; Ampatzidis, Y. Development and evaluation of a low-cost and smart technology for precision weed management utilizing artificial intelligence. Comput. Electron. Agric. 2019, 157, 339–350. [Google Scholar] [CrossRef]
- Ampatzidis, Y. Applications of Artificial Intelligence for Precision Agriculture. EDIS 2018, 2018, 1–5. [Google Scholar] [CrossRef]
- Abdulridha, J.; Ehsani, R.; Abd-Elrahman, A.; Ampatzidis, Y. A remote sensing technique for detecting laurel wilt disease in avocado in presence of other biotic and abiotic stresses. Comput. Electron. Agric. 2019, 156, 549–557. [Google Scholar] [CrossRef]
- Pantazi, X.E.; Moshou, D.; Tamouridou, A.A. Automated leaf disease detection in different crop species through image features analysis and One Class Classifiers. Comput. Electron. Agric. 2019, 156, 96–104. [Google Scholar] [CrossRef]
- Thapa, R.; Zhang, K.; Snavely, N.; Belongie, S.; Khan, A. The Plant Pathology Challenge 2020 data set to classify foliar disease of apples. Appl. Plant Sci. 2020, 8, e11390. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.J.; Fan, J.; Du, Y.X.; Li, B.S.; Xiong, N.; Bekkering, E. MDFC-ResNet: An Agricultural IoT System to Accurately Recognize Crop Diseases. IEEE Access 2020, 8, 115287–115298. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision (ICCV 2017), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2016), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Howard, A.; Sandler, M.; Chen, B.; Wang, W.; Chen, L.C.; Tan, M.; Chu, G.; Vasudevan, V.; Zhu, Y.; Pang, R.; et al. Searching for mobileNetV3. In Proceedings of the IEEE International Conference on Computer Vision (ICCV 2019), Seoul, Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger 2016. Available online: https://arxiv.org/abs/1612.08242 (accessed on 24 November 2021).
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar] [CrossRef] [Green Version]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. 2020. Available online: https://arxiv.org/abs/2004.10934 (accessed on 21 November 2021).
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional Networks for Biomedical Image Segmentation; Springer: Berlin/Heidelberg, Germany, 2015; Volume 9351, pp. 234–241. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [Green Version]
- Pinheiro, P.O.; Lin, T.Y.; Collobert, R.; Dollár, P. Learning to Refine Object Segments; Springer: Berlin/Heidelberg, Germany, 2016; Volume 9905, pp. 75–91. [Google Scholar] [CrossRef] [Green Version]
- Kirillov, A.; Levinkov, E.; Andres, B.; Savchynskyy, B.; Rother, C. InstanceCut: From Edges to Instances with MultiCut. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2017; pp. 7322–7331. [Google Scholar]
- Arnab, A.; Torr, P.H. Pixelwise Instance Segmentation with a Dynamically Instantiated Network. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2017; pp. 879–888. [Google Scholar]
- Li, Y.; Qi, H.; Dai, J.; Ji, X.; Wei, Y. Fully Convolutional Instance-Aware Semantic Segmentation. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2017; pp. 4438–4446. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. 2017. Available online: https://arxiv.org/abs/1704.04861 (accessed on 24 November 2021).
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4510–4520. [Google Scholar]
- Yang, T.J.; Howard, A.; Chen, B.; Zhang, X.; Go, A.; Sandler, M.; Sze, V.; Adam, H. NetAdapt: Platform-Aware Neural Network Adaptation for Mobile Applications. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2018; Volume 11214, pp. 289–304. [Google Scholar]
- Shu, X.; Zhang, L.; Qi, G.J.; Liu, W.; Tang, J. Spatiotemporal Co-attention Recurrent Neural Networks for Human-Skeleton Motion Prediction. IEEE Trans. Pattern Anal. Mach. Intell. 2021. [Google Scholar] [CrossRef]
- Tang, J.; Shu, X.; Yan, R.; Zhang, L. Coherence Constrained Graph LSTM for Group Activity Recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 44, 636–647. [Google Scholar] [CrossRef]
- Perez-Cham, O.E.; Puente, C.; Soubervielle-Montalvo, C.; Olague, G.; Aguirre-Salado, C.A.; Nuñez-Varela, A.S. Parallelization of the Honeybee Search Algorithm for Object Tracking. Appl. Sci. 2020, 10, 2122. [Google Scholar] [CrossRef] [Green Version]
- Shu, X.; Qi, G.J.; Tang, J.; Wang, J. Weakly-Shared deep transfer networks for heterogeneous-domain knowledge propagation. In Proceedings of the MM 2015—Proceedings of the 2015 ACM Multimedia Conference, Brisbane, Australia, 26–30 October 2015; pp. 35–44. [Google Scholar] [CrossRef]
- Olague, G.; Ibarra-Vázquez, G.; Chan-Ley, M.; Puente, C.; Soubervielle-Montalvo, C.; Martinez, A. A Deep Genetic Programming Based Methodology for Art Media Classification Robust to Adversarial Perturbations. In International Symposium on Visual Computing; Springer: Berlin/Heidelberg, Germany, 2020; Volume 12509, pp. 68–79. [Google Scholar] [CrossRef]
- Sharif, M.; Khan, M.A.; Iqbal, Z.; Azam, M.F.; Lali, M.I.U.; Javed, M.Y. Detection and classification of citrus diseases in agriculture based on optimized weighted segmentation and feature selection. Comput. Electron. Agric. 2018, 150, 220–234. [Google Scholar] [CrossRef]
- Argüeso, D.; Picon, A.; Irusta, U.; Medela, A.; San-Emeterio, M.G.; Bereciartua, A.; Alvarez-Gila, A. Few-Shot Learning approach for plant disease classification using images taken in the field. Comput. Electron. Agric. 2020, 175, 105542. [Google Scholar] [CrossRef]
- Jothiaruna, N.; Sundar, K.J.A.; Karthikeyan, B. A segmentation method for disease spot images incorporating chrominance in Comprehensive Color Feature and Region Growing. Comput. Electron. Agric. 2019, 165, 104934. [Google Scholar] [CrossRef]
- Loey, M.; ElSawy, A.; Afify, M. Deep learning in plant diseases detection for agricultural crops: A survey. Int. J. Serv. Sci. Manag. Eng. Technol. 2020, 11, 41–58. [Google Scholar] [CrossRef]
- Sandhu, G.K.; Kaur, R. Plant Disease Detection Techniques: A Review. In Proceedings of the IEEE International Conference on Automation, Computational and Technology Management (ICACTM 2019), London, UK, 24–26 April 2019; pp. 34–38. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-FCN: Object Detection via Region-Based Fully Convolutional Networks; Curran Associates Inc.: Red Hook, NY, USA, 2016; pp. 379–387. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8693, pp. 740–755. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Backbone | AP @ IoU = 0.50 | AP @ IoU = 0.75 |
|---|---|---|
| ResNet-50 | 0.486 | 0.282 |
| MobileNetV3-Large | 0.369 | 0.273 |
| MobileNetV3-Large-Mobile | 0.277 | 0.158 |
| Backbone | AP @ IoU = 0.50 | AP @ IoU = 0.75 |
|---|---|---|
| ResNet-50 | 0.489 | 0.368 |
| MobileNetV3-Large | 0.351 | 0.173 |
| MobileNetV3-Large-Mobile | 0.264 | 0.127 |
| Backbone | Time (s.) |
|---|---|
| ResNet-50 | 0.26 |
| MobileNetV3-Large | 0.22 |
| MobileNetV3-Large-Mobile | 0.07 |
| Backbone | Accuracy |
|---|---|
| ResNet-50 | 80.5% |
| MobileNetV3-Large | 68.3% |
| MobileNetV3-Large-Mobile | 53.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Storey, G.; Meng, Q.; Li, B. Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture. Sustainability 2022, 14, 1458. https://doi.org/10.3390/su14031458
Storey G, Meng Q, Li B. Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture. Sustainability. 2022; 14(3):1458. https://doi.org/10.3390/su14031458
Chicago/Turabian StyleStorey, Gary, Qinggang Meng, and Baihua Li. 2022. "Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture" Sustainability 14, no. 3: 1458. https://doi.org/10.3390/su14031458
APA StyleStorey, G., Meng, Q., & Li, B. (2022). Leaf Disease Segmentation and Detection in Apple Orchards for Precise Smart Spraying in Sustainable Agriculture. Sustainability, 14(3), 1458. https://doi.org/10.3390/su14031458