Cast Shadow Detection to Quantify the Aerosol Optical Thickness for Atmospheric Correction of High Spatial Resolution Optical Imagery


Abstract
:
1. Introduction
2. Cast Shadow Detection Method
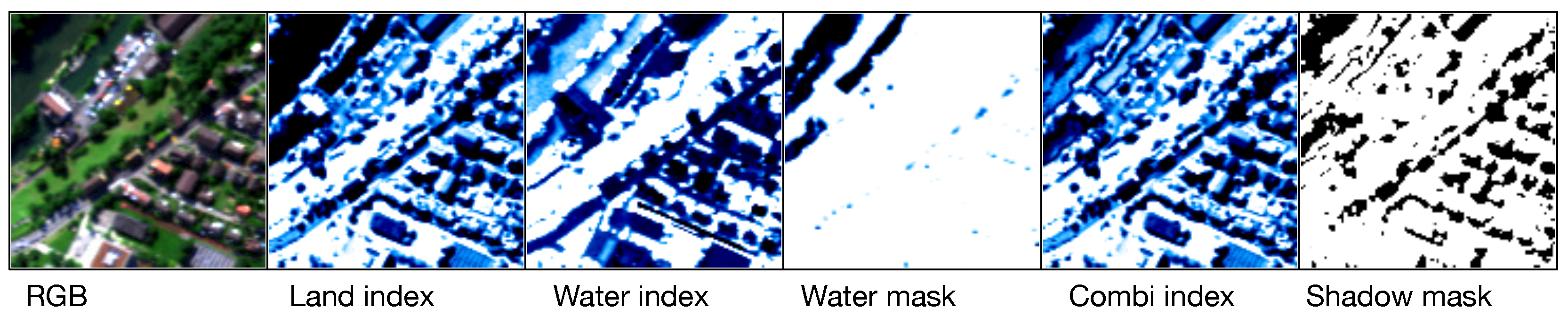
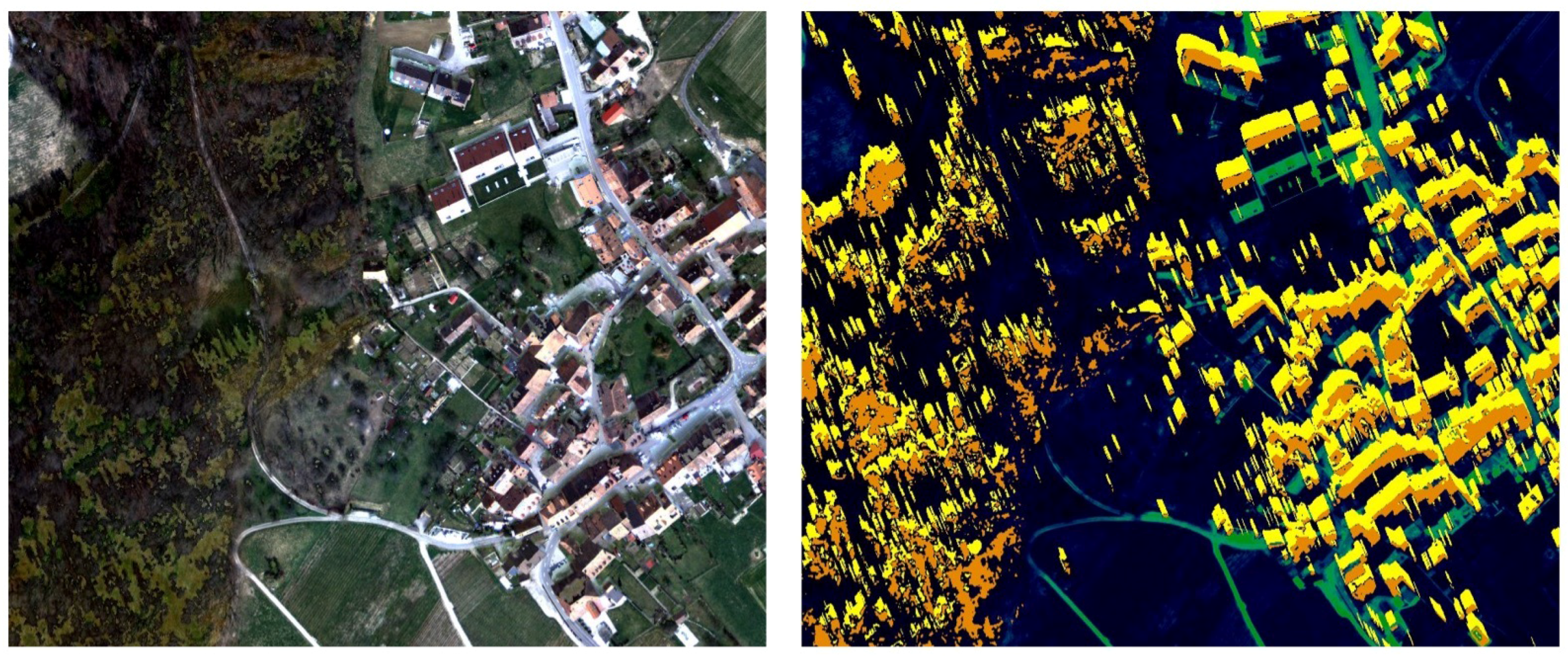
2.1. Cast Shadows over Land Surfaces
2.2. Cast Shadows over Water Bodies
2.3. Index Combination
3. Aerosol Signature Retrieval
3.1. Theoretical Background
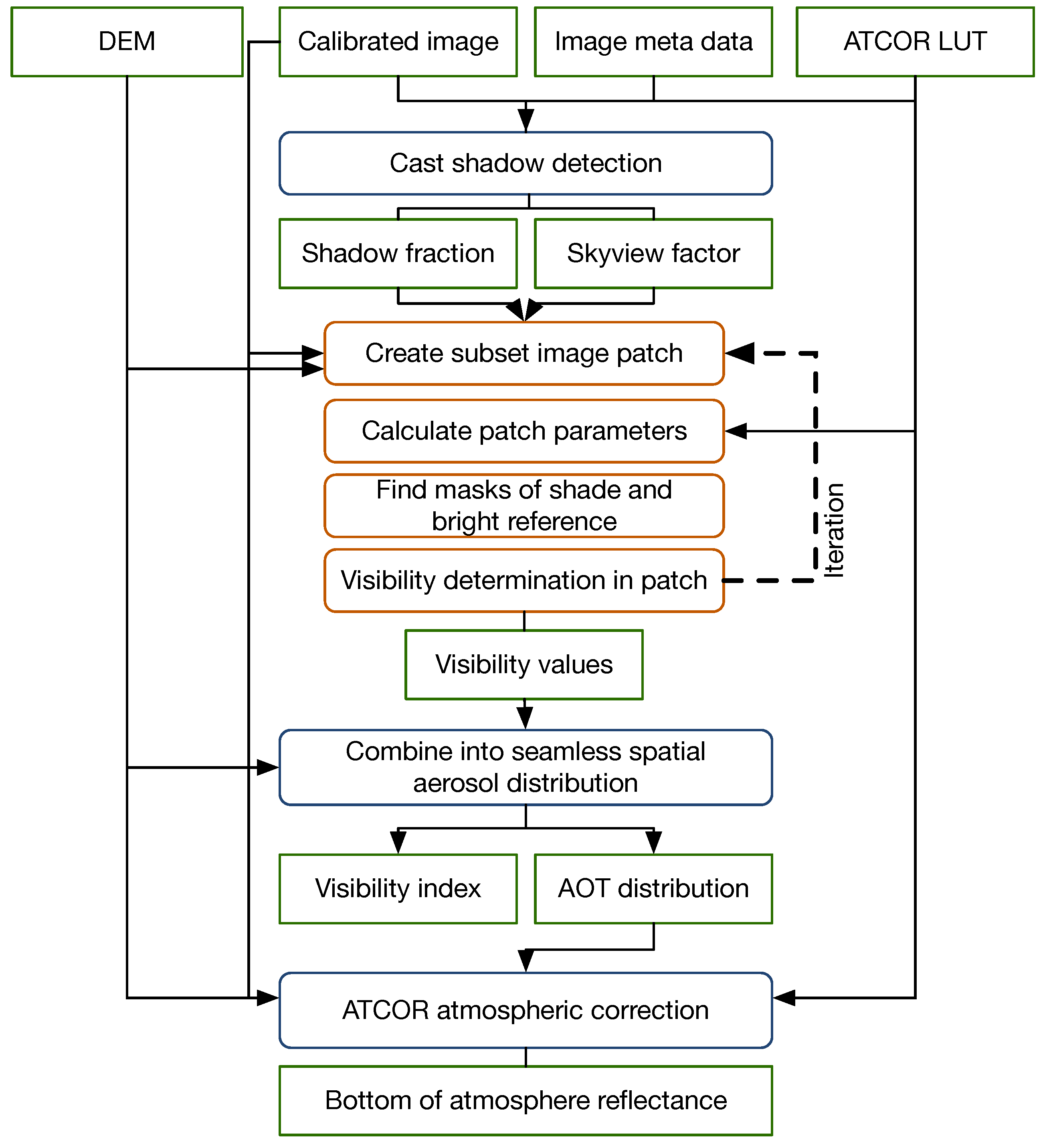
3.2. AOT Retrieval Procedure on Image Patch
- Create the data subset patch, containing at-sensor radiance image, shadow fraction, skyview factor and subset of atmospheric LUT for average ground altitude.
- Derive patch-specific information such as the ground altitude and the view zenith angle.
- Find masks for cast shadow pixels and bright neighbor reference pixels (compare also last image in Figure 7 and see comment below).
- Set the start values for the iteration, starting with a visibility of 80 km.
- Find the optimal visibility by applying the atmospheric compensation including shadow correction iteratively:
- (a)
- Get atmospheric parameters and adjacency weighting factor for given visibility.
- (b)
- Calculate direct and diffuse irradiance.
- (c)
- find at-sensor radiance corrected for path radiance while correcting the adjacency influence.
- (d)
- Find terrain irradiance using average first estimate of neighboring reflectance.
- (e)
- Calculate reflectance value for whole image patch.
- (f)
- Compare brightness of pixels in cast shadow areas to illuminated bright areas, and
- (g)
- stop iteration if the average difference between reference pixels and shadow corrected pixels drops below 0.05% or after 30 steps.
- Store the derived optimal visibility value and its location within the image.
3.3. Application to Large Scale Imagery
- Read meta data and calibration data for the sensor.
- Load spectral band closest to a predefined reference wavelength (typically at 550 nm) and transform to at-sensor radiance.
- Load scan angle, shadow fraction, and skyview file for current image.
- Loop over moving window using a the pre-defined tile size.
- Load specific atmospheric LUT for flight altitude of instrument, solar zenith angle and average ground altitude and reference band for the tile.
- Calculate visibilities for the tiles (i.e., for the image patches) using the procedure described in the previous section.
- Omit outliers, triangulate valid retrievals, and interpolate visibility values in order to cover the full image extent.
- Derive the height-dependent AOT map using the digital elevation model, the visibility index, and the MODTRAN-based relation between aerosol optical thickness and visibility according to Equation (15).
3.4. Sensitivity Analysis
4. Validation Results
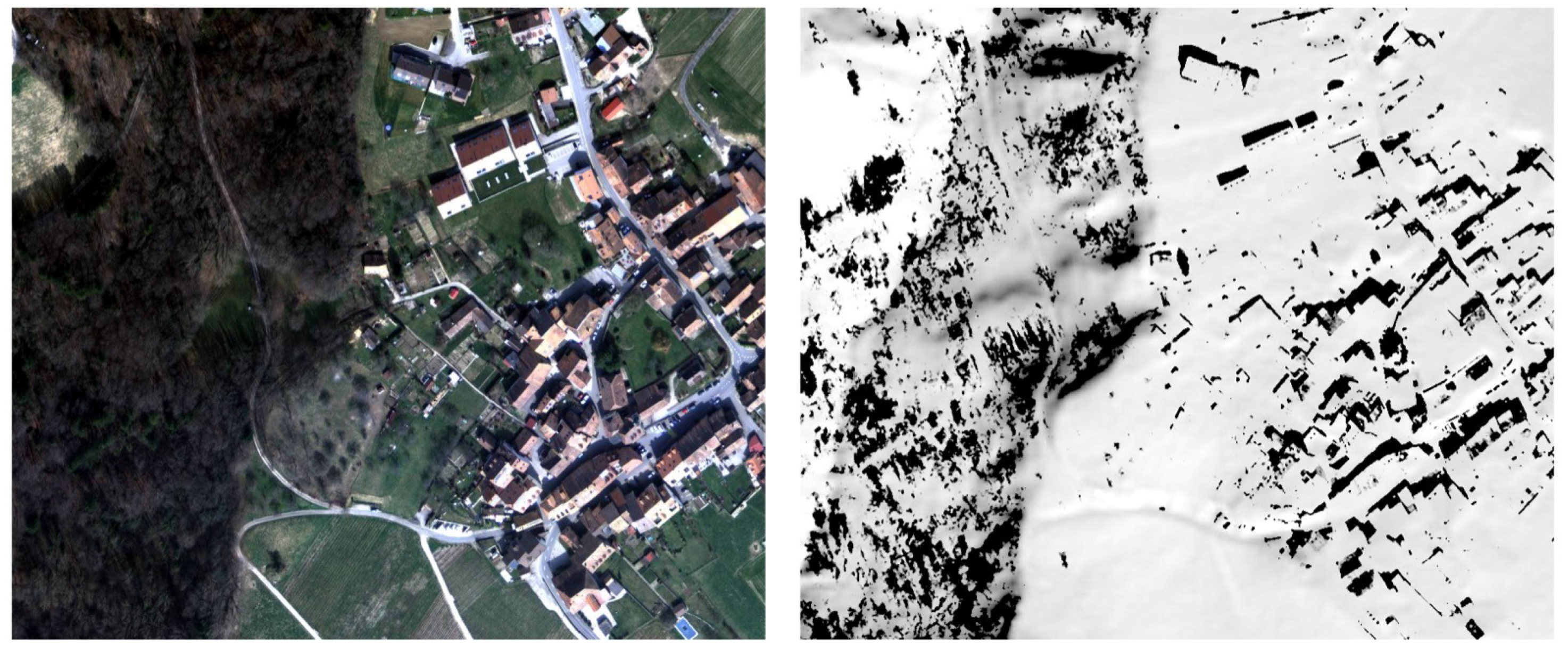
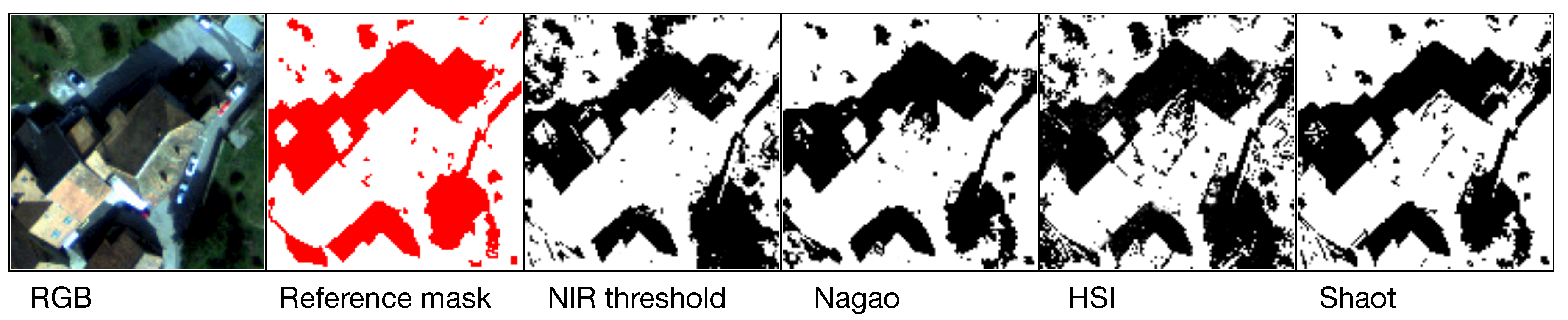
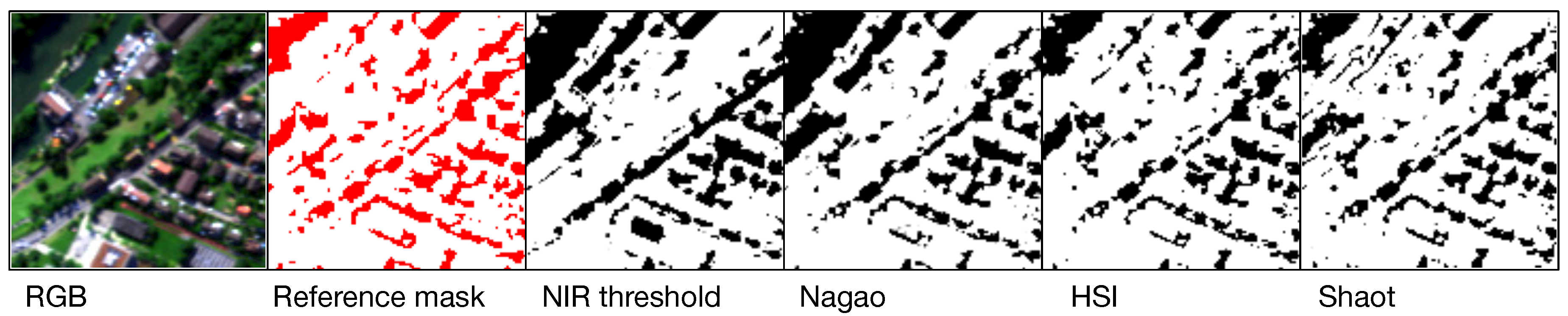
4.1. Validation of Cast Shadow Detection
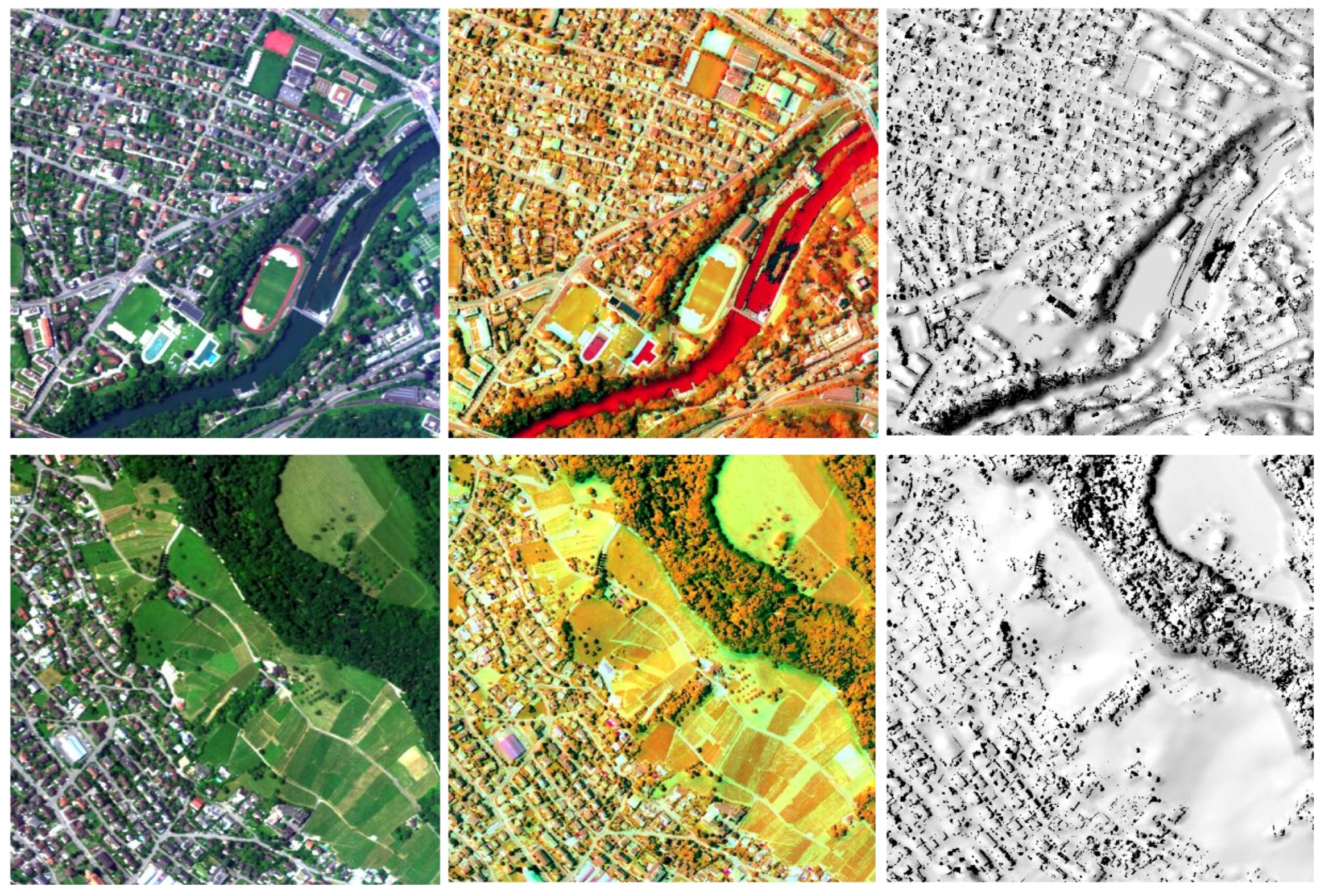
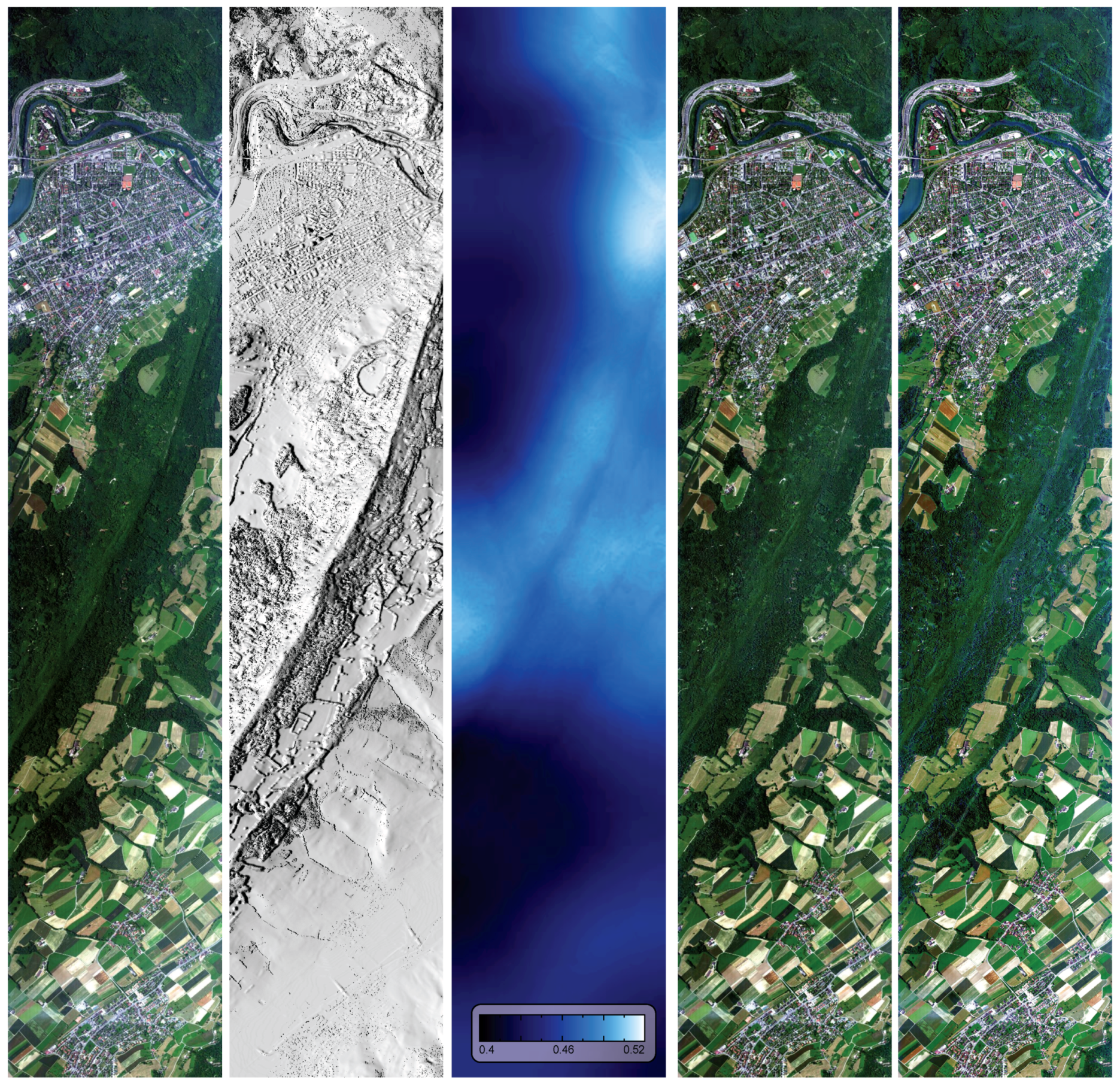
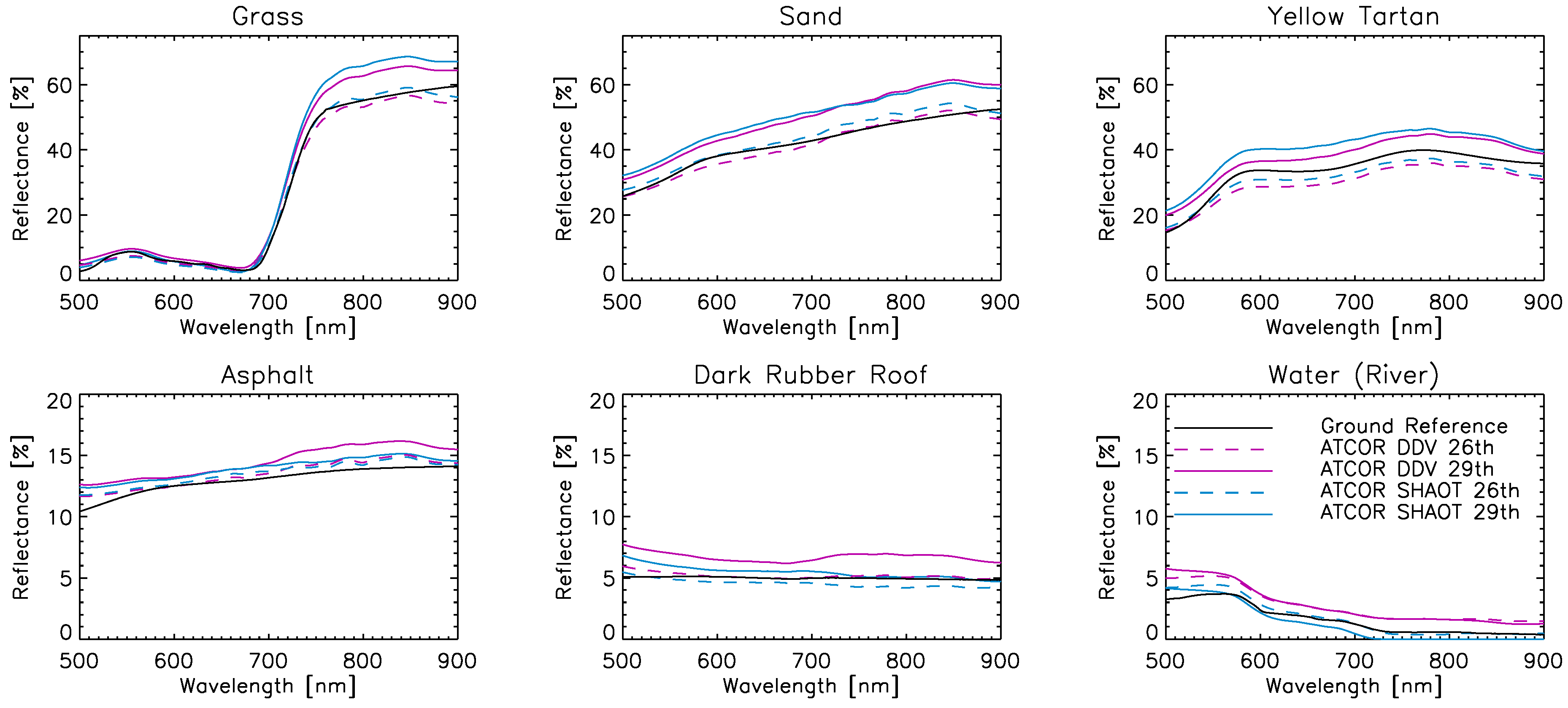
4.2. Results on APEX Imaging Spectroscopy Data
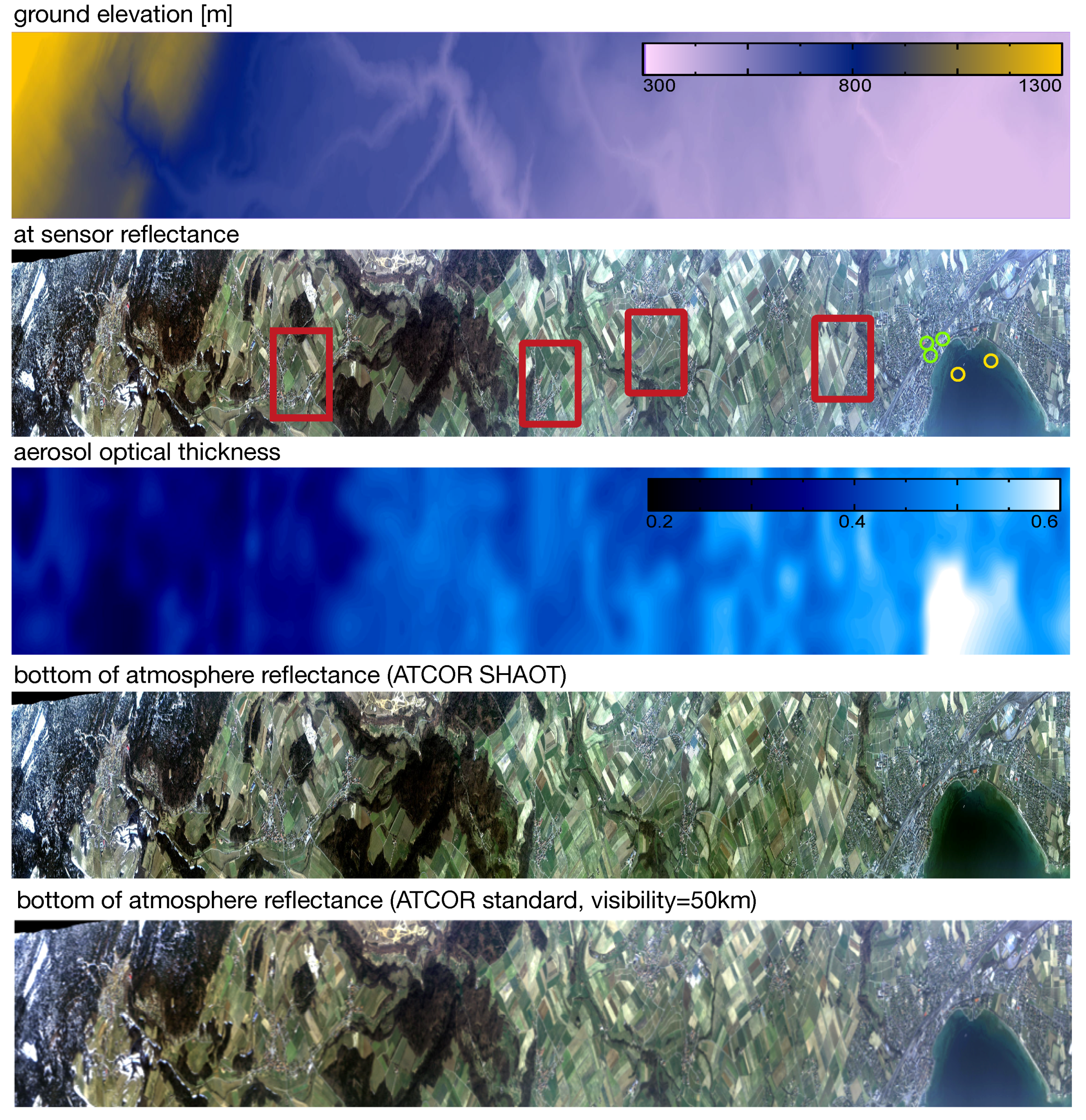
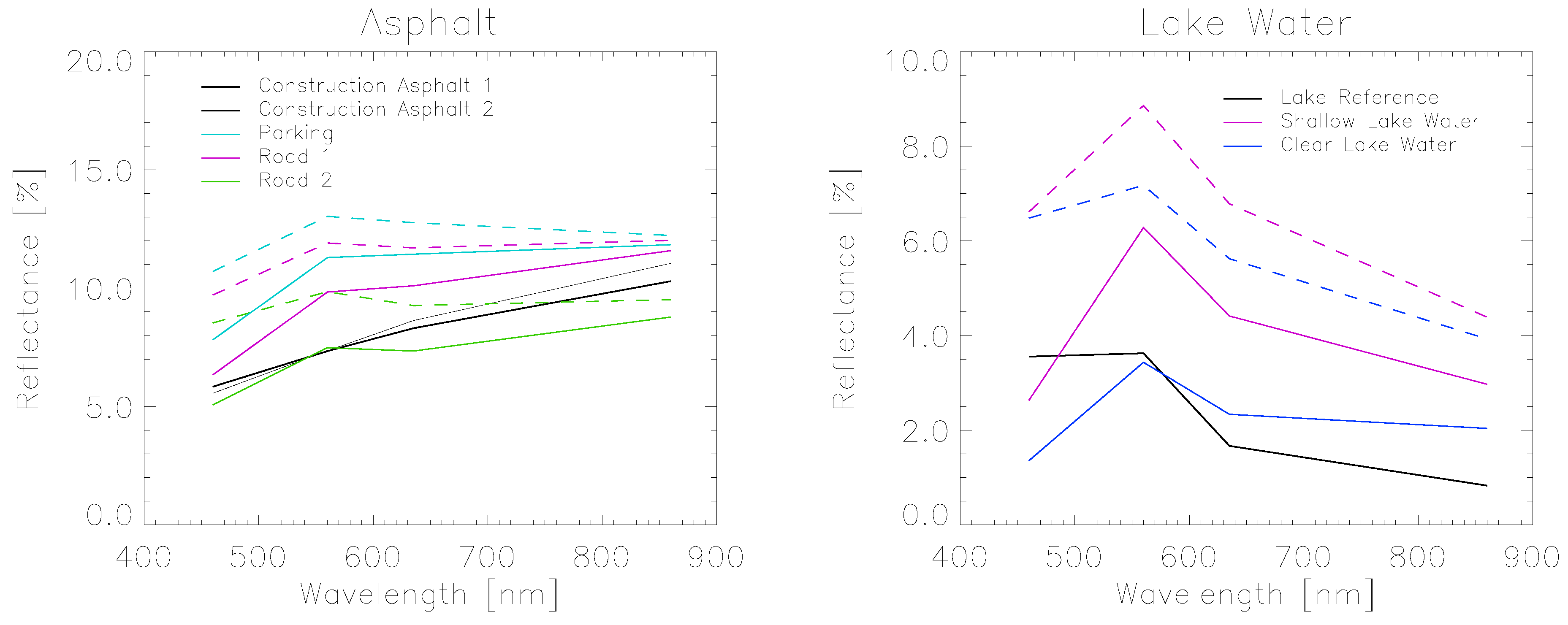
4.3. Results on Airborne Digital Photogrammetry Data
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- World Meteorological Organization (WMO). WMO Guide to Meteorological Instruments and Methods of Observation; Technical Report; WMO: Geneva, Switzerland, 2014. [Google Scholar]
- Gao, B.C.; Montes, M.J.; Davis, C.O.; Goetz, A.F.H. Atmospheric correction algorithms for hyperspectral remote sensing data of land and ocean. Remote Sens. Environ. 2009, 113, S17–S24. [Google Scholar] [CrossRef]
- Berk, A.; Cooley, T.W.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Leonid Muratov, J.L.; Fox, M.J.; Adler-Golden, S.M.; Chetwynd, J.H.; Hoke, M.L.; et al. MODTRAN5: A reformulated atmospheric band model with auxiliary species and practical multiple scattering options. In Remote Sensing of Clouds and the Atmosphere IX; Schäfer, K.P., Cameron, A., Picard, R.H., Sifakis, N.I., Eds.; SPIE: Bellingham, WA, USA, 2004; Volume 5571, pp. 78–85. [Google Scholar]
- Berk, A.; Anderson, G.P.; Acharya, P.K.; Bernstein, L.S.; Muratov, L.; Lee, J.; Fox, M.; Adler-Golden, S.M.; Chetwynd, J.H., Jr.; Hoke, M.L.; et al. MODTRAN5: 2006 update. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XII; Shen, S.S., Lewis, P.E., Eds.; SPIE: Bellingham, WA, USA, 2006; Volume 6233, p. 62331F 1–8. [Google Scholar]
- Richter, R. Correction of satellite imagery over mountainous terrain. Appl. Opt. 1998, 37, 4004–4014. [Google Scholar] [CrossRef] [PubMed]
- Adler-Golden, S.M.; Matthew, M.W.; Bernstein, L.S.; Levine, R.Y. Atmospheric correction for short-wave spectral imagery based on MODTRAN4. In Imaging Spectrometry V; Descour, M.R., Shen, S.S., Eds.; SPIE: Bellingham, WA, USA, 1999; Volume 3753, pp. 61–69. [Google Scholar]
- Nicodemus, F.E.; Richmond, J.C.; Hsia, J.J.; Ginsberg, I.W.; Limperis, T. Geometrical Considerations and Nomenclature for Reflectance; U.S. Department of Commerce, National Bureau of Standards: Washington, DC, USA, 1977; pp. 1–52.
- Schläpfer, D.; Richter, R.; Feingersh, T. Operational BRDF Effects Correction for Wide-Field-of-View Optical Scanners (BREFCOR). IEEE Trans. Geosci. Remote Sens. 2015, 53, 1855–1864. [Google Scholar] [CrossRef] [Green Version]
- Tanre, D.; Herman, M.; Deschamps, P. Influence of the atmosphere on space measurements of directional properties. Appl. Opt. 1983, 22, 733–741. [Google Scholar] [CrossRef] [PubMed]
- Chavez, P.S., Jr. An improved dark-object subtraction technique for atmospheric scattering correction of multispectral data. Remote Sens. Environ. 1988, 24, 459–479. [Google Scholar] [CrossRef]
- Zhong, B.; Wu, S.; Yang, A.; Liu, Q. An Improved Aerosol Optical Depth Retrieval Algorithm for Moderate to High Spatial Resolution Optical Remotely Sensed Imagery. Remote Sens. 2017, 9, 555. [Google Scholar] [CrossRef]
- Reinersman, P.N.; Carder, K.L.; Chen, F.I. Satellite-sensor calibration verification with the cloud-shadow method. Appl. Opt. 1998, 37, 5541–5549. [Google Scholar] [CrossRef] [PubMed]
- Amin, R.; Lewis, D.; Gould, R.W.; Hou, W.; Lawson, A.; Ondrusek, M.; Arnone, R. Assessing the Application of Cloud-Shadow Atmospheric Correction Algorithm on HICO. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2646–2653. [Google Scholar] [CrossRef]
- Kaufman, Y.J. Satellite sensing of aerosol absorption. J. Geophys. Res. 1987, 92, 4307–4317. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Sendra, C. Algorithm for automatic atmospheric corrections to visible and near-iR satellite imagery. Int. J. Remote Sens. 1988, 9, 1357–1381. [Google Scholar] [CrossRef]
- Kaufman, Y.; Tanre, D.; Gordon, H.; Nakajima, T.; Lenoble, J.; Frouin, R.; Grassl, H.; Herman, B.; King, M.; Teillet, P. Passive remote sensing of tropospheric aerosol and atmospheric correction for the aerosol effect. J. Geophys. Res. Atmos. 1997, 102, 16815–16830. [Google Scholar] [CrossRef]
- Kaufman, Y.J.; Wald, A.E.; Remer, L.A.; Gao, B.C.; Li, R.R. The MODIS 2.1 μm channel—Correlation with visible reflectance for use in remote sensing of aerosol. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1286–1298. [Google Scholar] [CrossRef]
- Chu, D.A. Validation of MODIS aerosol optical depth retrieval over land. Geophys. Res. Lett. 2002, 29. [Google Scholar] [CrossRef]
- Richter, R.; Schläpfer, D.; Müller, A. An automatic atmospheric correction algorithm for visible/NIR imagery. Int. J. Remote Sens. 2006, 27, 2077–2085. [Google Scholar] [CrossRef]
- Diner, D.; Martonchik, J. Atmospheric transmittance from spacecraft using multiple view angle imagery. Appl. Opt. 1985, 24, 3503–3511. [Google Scholar] [CrossRef] [PubMed]
- Bevan, S.L.; North, P.R.J.; Los, S.O.; Grey, W.M.F. A global dataset of atmospheric aerosol optical depth and surface reflectance from AATSR. Remote Sens. Environ. 2012, 116, 199–210. [Google Scholar] [CrossRef]
- Prasad, A.K.; Singh, R.P. Comparison of MISR-MODIS aerosol optical depth over the Indo-Gangetic basin during the winter and summer seasons (2000–2005). Remote Sens. Environ. 2007, 107, 109–119. [Google Scholar] [CrossRef]
- Guanter, L.; Gomez-Chova, L.; Moreno, J. Coupled retrieval of aerosol optical thickness, columnar water vapor and surface reflectance maps from ENVISAT/MERIS data over land. Remote Sens. Environ. 2008, 112, 2898–2913. [Google Scholar] [CrossRef]
- Holzer-Popp, T.; Schroedter, M.; Gesell, G. Retrieving aerosol optical depth and type in the boundary layer over land and ocean from simultaneous GOME spectrometer and ATSR-2 radiometer measurements, 2. Case study application and validation. J. Geophys. Res. 2002, 107. [Google Scholar] [CrossRef]
- Dubovik, O.; Lapyonok, T.; Litvinov, P.; Herman, M.; Fuertes, D.; Ducos, F.; Torres, B.; Derimian, Y.; Huang, X.; Lopatin, A.; et al. GRASP: A versatile algorithm for characterizing the atmosphere. SPIE Newsroom 2014, 1–4. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Pascual, D.; Dedieu, G. A multi-temporal and multi-spectral method to estimate aerosol optical thickness over land, for the atmospheric correction of FormoSat-2, LandSat, VENS and Sentinel-2 images. Remote Sens. 2015, 7, 2668–2691. [Google Scholar] [CrossRef]
- Schläpfer, D.; Richter, R. Atmospheric Correction of Imaging Spectroscopy Data Using Shadow-Based Quantification of Aerosol Scattering Effects. EARSeL eProc. 2017, 16, 21–28. [Google Scholar]
- Thomas, C.; Briottet, X.; Santer, R. Remote sensing of aerosols in urban areas from very high spatial resolution images: Application of the OSIS code to multispectral PELICAN airborne data. Int. J. Remote Sens. 2013, 34, 919–937. [Google Scholar] [CrossRef]
- Lynch, D.K. Shadows. Appl. Opt. 2015, 54, B154–B164. [Google Scholar] [CrossRef] [PubMed]
- Shahtahmassebi, A.R.; Yang, N.; Wang, K.; Moore, N.; Shen, Z. Review of shadow detection and de-shadowing methods in remote sensing. Chin. Geogr. Sci. 2013, 23, 403–420. [Google Scholar] [CrossRef]
- Luo, L.; Trishenko, A.P.; Khlopenkov, K.V. Developing clear-sky, cloud and cloud shadow mask for producing clear-sky composites at 250-meter spatial resolution for the seven MODIS land bands over canada and north america. Remote Sens. Environ. 2008, 112, 4167–4185. [Google Scholar] [CrossRef]
- Adeline, K.R.M.; Chen, M.; Briottet, X.; Pang, S.K.; Paparoditis, N. Shadow detection in very high spatial resolution aerial images: A comparative study. ISPRS J. Photogramm. Remote Sens. 2013, 80, 21–38. [Google Scholar] [CrossRef]
- Tsai, V.J.D. A comparative study on shadow compensation of color aerial images in invariant color models. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1661–1671. [Google Scholar] [CrossRef]
- Brell, M.; Segl, K.; Guanter, L.; Bookhagen, B. Hyperspectral and LIDAR intensity data fusion: A framework for the rigorous correction of illumination, anisotropic effects, and cross calibration. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2799–2810. [Google Scholar] [CrossRef]
- Adler-Golden, S.; Matthew, M.; Anderson, G.; Felde, G.; Gardner, J. An algorithm for de-shadowing spectral imagery. In Proceedings of the 11th Airborne Earth Science Workshop, Pasadena, CA, USA, 5–8 March 2002; pp. 1–8. [Google Scholar]
- Richter, R.; Müller, A. De-shadowing of satellite/airborne imagery. Int. J. Remote Sens. 2005, 26, 3137–3148. [Google Scholar] [CrossRef]
- Arevalo, V.; Gonzalez, J.; Ambrosio, G. Shadow detection in colour high-resolution satellite images. Int. J. Remote Sens. 2008, 29, 1945–1963. [Google Scholar] [CrossRef]
- Nagao, M.; Matsuyama, T.; Ikeda, Y. Region extraction and shape analysis in aerial photographs. Comput. Graph. Image Process. 1979, 10, 195–223. [Google Scholar] [CrossRef]
- Asner, G. Canopy shadow in IKONOS satellite observations of tropical forests and savannas. Remote Sens. Environ. 2003, 87, 521–533. [Google Scholar] [CrossRef]
- Milas, A.S.; Arend, K.; Mayer, C.; Simonson, M.A.; Mackey, S. Different colours of shadows: Classification of UAV images. Int. J. Remote Sens. 2017, 38, 3084–3100. [Google Scholar] [CrossRef]
- Rüfenacht, D.; Fredembach, C.; Süsstrunk, S. Automatic and Accurate Shadow Detection Using Near-Infrared Information. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1672–1678. [Google Scholar] [CrossRef] [PubMed]
- Makarau, A.; Richter, R.; Müller, R. Adaptive shadow detection using a blackbody radiator model. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2049–2059. [Google Scholar] [CrossRef]
- Schläpfer, D.; Richter, R.; Damm, A. Correction of Shadowing In Imaging Spectroscopy Data by Quantification Of The Proportion of Diffuse Illumination. In Proceedings of the 8th SIG-IS EARSeL Imaging Spectroscopy Workshop, Nantes, France, 8–10 April 2013; pp. 1–10. [Google Scholar]
- Leblon, B.; Gallant, L.; Granberg, H. Effects of shadowing types on ground-measured visible and near-infrared shadow reflectances. Remote Sens. Environ. 1996, 58, 322–328. [Google Scholar] [CrossRef]
- Gershon, R.; Jepson, A.D.; Tsotsos, J.K. Ambient illumination and the determination of material changes. J. Opt. Soc. Am. A 1986, 3, 1700–1707. [Google Scholar] [CrossRef] [PubMed]
- Baldridge, A.M.; Hook, S.J.; Grove, C.I.; Rivera, G. The ASTER spectral library version 2.0. Remote Sens. Environ. 2009, 113, 711–715. [Google Scholar] [CrossRef]
- Jacquemoud, S.; Verhoef, W.; Baret, F.; Bacour, C.; Zarco-Tejada, P.J.; Asner, G.P.; François, C.; Ustin, S.L. PROSPECT+SAIL models: A review of use for vegetation characterization. Remote Sens. Environ. 2009, 113, S56–S66. [Google Scholar] [CrossRef]
- Bochow, M.; Rogass, C.; Peisker, T.; Heim, B.; Bartsch, I.; Segl, K.; Kaufmann, H. Automatic shadow detection in hyperspectral VIS-NIR images. In Proceedings of the 11th Earsel Imaging Spectroscopy Workshop, Edinburgh, UK, 11–13 April 2011; pp. 1–9. [Google Scholar]
- Amin, R.; Gould, R.; Hou, W.; Arnone, R.; Lee, Z. Optical algorithm for cloud shadow detection over water. IEEE Trans. Geosci. Remote Sens. 2013, 51, 732–741. [Google Scholar] [CrossRef]
- Schläpfer, D.; Borel, C.; Keller, J.; Itten, K. Atmospheric Pre-Corrected Differential Absorption Techniques to Retrieve Columnar Water Vapor. Remote Sens. Environ. 1998, 65, 353–366. [Google Scholar] [CrossRef]
- Larsen, N.; Stamnes, K. Use of shadows to retrieve water vapor in hazy atmospheres. Appl. Opt. 2005, 44, 6986–6994. [Google Scholar] [CrossRef] [PubMed]
- Richter, R.; Schläpfer, D. Atmospheric/Topographic Correction for Airborne Imagery; Technical Report DLR-IB 565-02; ReSe Applications LLC: Wil, Switzerland, 2017; pp. 1–262. [Google Scholar]
- Richter, R. On the in-flight absolute calibration of high spatial resolution spaceborne sensors using small ground targets. Int. J. Remote Sens. 1997, 18, 2827–2833. [Google Scholar] [CrossRef]
- John, E.; Hay, D.C.M. Estimating solar irradiance on inclined surfaces: A review and assessment of methodologies. Int. J. Sol. Energy 1985, 3, 203–240. [Google Scholar]
- Borel, C.; Ewald, K.; Manzardo, M.; Wamsley, C.; Jacobson, J. Adjoint radiosity based algorithms for retrieving target reflectances in urban area shadows. In Proceedings of the 6th Earsel SIG IS Workshop on Imaging Spectroscopy, Tel Aviv, Israel, 22–24 September 2008; pp. 1–6. [Google Scholar]
- Sandau, R.; Braunecker, B.; Driescher, H.; Eckardt, A.; Hilbert, S.; Hutton, J.; Kirchhofer, W.; Lithopoulos, E.; Reulke, R.; Wicki, S. Design Principles of the LH Systems ADS40 Airborne Digital Sensor. Int. Arch. Photogramm. Remote Sens. 2000, 33, 258–265. [Google Scholar]
- Schaepman, M.E.; Jehle, M.; Hueni, A.; D’Odorico, P.; Damm, A.; Weyermann, J.; Schneider, F.D.; Laurent, V.; Popp, C.; Seidel, F.C.; et al. Advanced radiometry measurements and Earth science applications with the Airborne Prism Experiment (APEX). Remote Sens. Environ. 2015, 158, 1–13. [Google Scholar] [CrossRef]
- Hueni, A.; Schläpfer, D.; Jehle, M.; Schaepman, M.E. Impacts of dichroic prism coatings on radiometry of the airborne imaging spectrometer APEX. Appl. Opt. 2014, 53, 5344–5352. [Google Scholar] [CrossRef] [PubMed]
- Hueni, A.; Biesemans, J.; Meuleman, K.; Itten, K.; DellEndice, F.; Schläpfer, D.; Odermatt, D.; Kneubuehler, M.; Adriaensen, S.; Kempenaers, S.; et al. Structure, components, and interfaces of the airborne prism experiment (APEX) processing and archiving facility. IEEE Trans. Geosci. Remote Sens. 2009, 47, 29–43. [Google Scholar] [CrossRef] [Green Version]
- Hueni, A.; Lenhard, K.; Baumgartner, A.; Schaepman, M.E. Airborne Prism Experiment Calibration Information System. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5169–5180. [Google Scholar] [CrossRef] [Green Version]
- Holben, B.; Eck, T.; Slutsker, I.; Tanre, D.; Buis, J.; Setzer, A.; Vermote, E.; Reagan, J.; Kaufman, Y.; Nakajima, T. AERONET—A federated instrument network and data archive for aerosol characterization. Remote Sens. Environ. 1998, 66, 1–16. [Google Scholar] [CrossRef]
- Hueni, A.; Damm, A.; Kneubuehler, M.; Schläpfer, D.; Schaepman, M.E. Field and Airborne Spectroscopy Cross Validation—Some Considerations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1117–1135. [Google Scholar] [CrossRef]
- Guo, J.; Liang, L.; Gong, P. Removing shadows from Google Earth images. Int. J. Remote Sens. 2010, 31, 1379–1389. [Google Scholar] [CrossRef]
- He, Q.; Chu, C.H.H. A New Shadow Removal Method for Color Images. Adv. Remote Sens. 2013, 2, 77–84. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Automated cloud, cloud shadow, and snow detection in multitemporal Landsat data: An algorithm designed specifically for monitoring land cover change. Remote Sens. Environ. 2014, 152, 217–234. [Google Scholar] [CrossRef]
- Sismanidis, P.; Karathanassi, V. De-shadowing of airborne imagery using at-sensor downwelling irradiance data. Int. J. Remote Sens. 2014, 35, 6973–6992. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Source | Forest | Settlement | Remarks |
|---|---|---|---|
| overestimate cast shadow | (+) 13.5% | (+) 51.7% | includes directly illuminated areas |
| underestimate cast shadow | 5.8% | 6.4% | no clear trend |
| vary reference shift distance | 0.4% | 1.8% | in steps of 1 m |
| vary reference angle | 6.0% | 0.9% | in steps of |
| neglect skyview factor | (+) 5.2% | (+) 5.3% | set to 100% |
| neglect adjacency effect | (+) 30.0% | (+) 52.4% | no adjacency correction |
| Test Case | NIR Threshold | Nagao Method | HSI Inversion | SHAOT Method |
|---|---|---|---|---|
| ADS (airborne digital system) | 69% | 82% | 71% | 85% |
| APEX (airborne prism experiment) | 46% | 62% | 75% | 76% |
| Altitude [m] | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sample 1 | 705 | 0.51 | 0.36 | 7.8 | 23.4 | 6.7 | 24.7 | 5.3 | 25.7 | 5.0 | 25.2 |
| Sample 2 | 609 | 0.14 | 0.44 | 8.7 | 28.0 | 7.7 | 29.6 | 3.9 | 29.3 | 5.3 | 30.7 |
| Sample 3 | 524 | 0.14 | 0.44 | 8.8 | 26.6 | 7.7 | 28.2 | 3.8 | 27.9 | 5.2 | 29.2 |
| Sample 4 | 425 | 0.16 | 0.50 | 9.6 | 22.4 | 8.6 | 23.7 | 8.6 | 23.5 | 5.6 | 24.5 |
| Mean | 8.7 | 25.1 | 7.7 | 26.6 | 5.4 | 26.6 | 5.3 | 27.4 | |||
| Mean Deviation | 0.5 | 2.2 | 0.5 | 2.4 | 1.6 | 2.0 | 0.2 | 2.6 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schläpfer, D.; Hueni, A.; Richter, R. Cast Shadow Detection to Quantify the Aerosol Optical Thickness for Atmospheric Correction of High Spatial Resolution Optical Imagery. Remote Sens. 2018, 10, 200. https://doi.org/10.3390/rs10020200
Schläpfer D, Hueni A, Richter R. Cast Shadow Detection to Quantify the Aerosol Optical Thickness for Atmospheric Correction of High Spatial Resolution Optical Imagery. Remote Sensing. 2018; 10(2):200. https://doi.org/10.3390/rs10020200
Chicago/Turabian StyleSchläpfer, Daniel, Andreas Hueni, and Rudolf Richter. 2018. "Cast Shadow Detection to Quantify the Aerosol Optical Thickness for Atmospheric Correction of High Spatial Resolution Optical Imagery" Remote Sensing 10, no. 2: 200. https://doi.org/10.3390/rs10020200
APA StyleSchläpfer, D., Hueni, A., & Richter, R. (2018). Cast Shadow Detection to Quantify the Aerosol Optical Thickness for Atmospheric Correction of High Spatial Resolution Optical Imagery. Remote Sensing, 10(2), 200. https://doi.org/10.3390/rs10020200