Time-Varying SAR Interference Suppression Based on Delay-Doppler Iterative Decomposition Algorithm



Abstract
:
1. Introduction
2. Mathematical Model of Received Signal
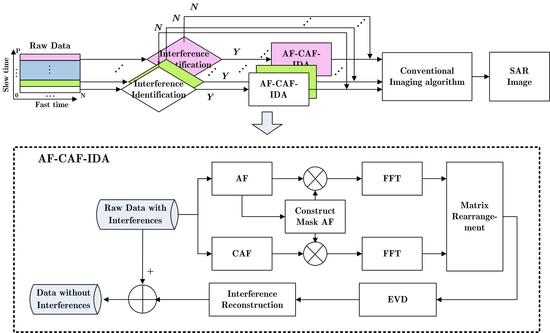
3. Interference Suppression Algorithm Using AF-CAF-IDA
3.1. SSM from AF-CAF for Mono-Component Signal
3.2. SSM from AF-CAF for Multi-Component Signal
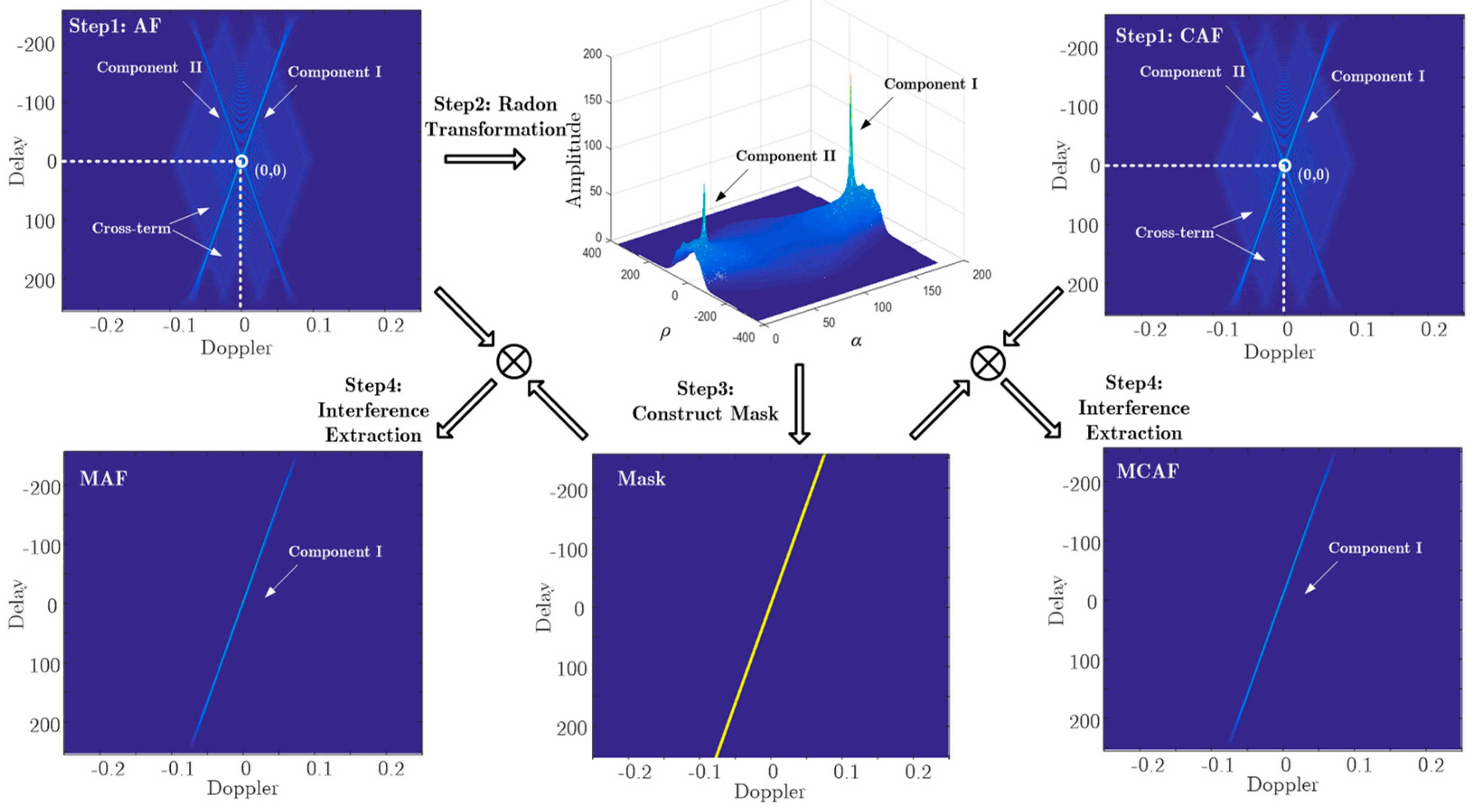
3.3. Binary Mask Construction for Signal Extraction and Cross-Terms Suppression
- (1)
- Calculate the AF () and CAF () of the received signals, respectively.
- (2)
- Determine the RAF (), and then perform a 1-D search at slice to identify the interference and record the maximum peak position . After that, compute the inverse RT with and , denoted as .
- (3)
- Compare the elements of with zero, and then binary mask can be expressed as follows:
- (4)
- Extract the interference in the AF and CAF plane as follows:
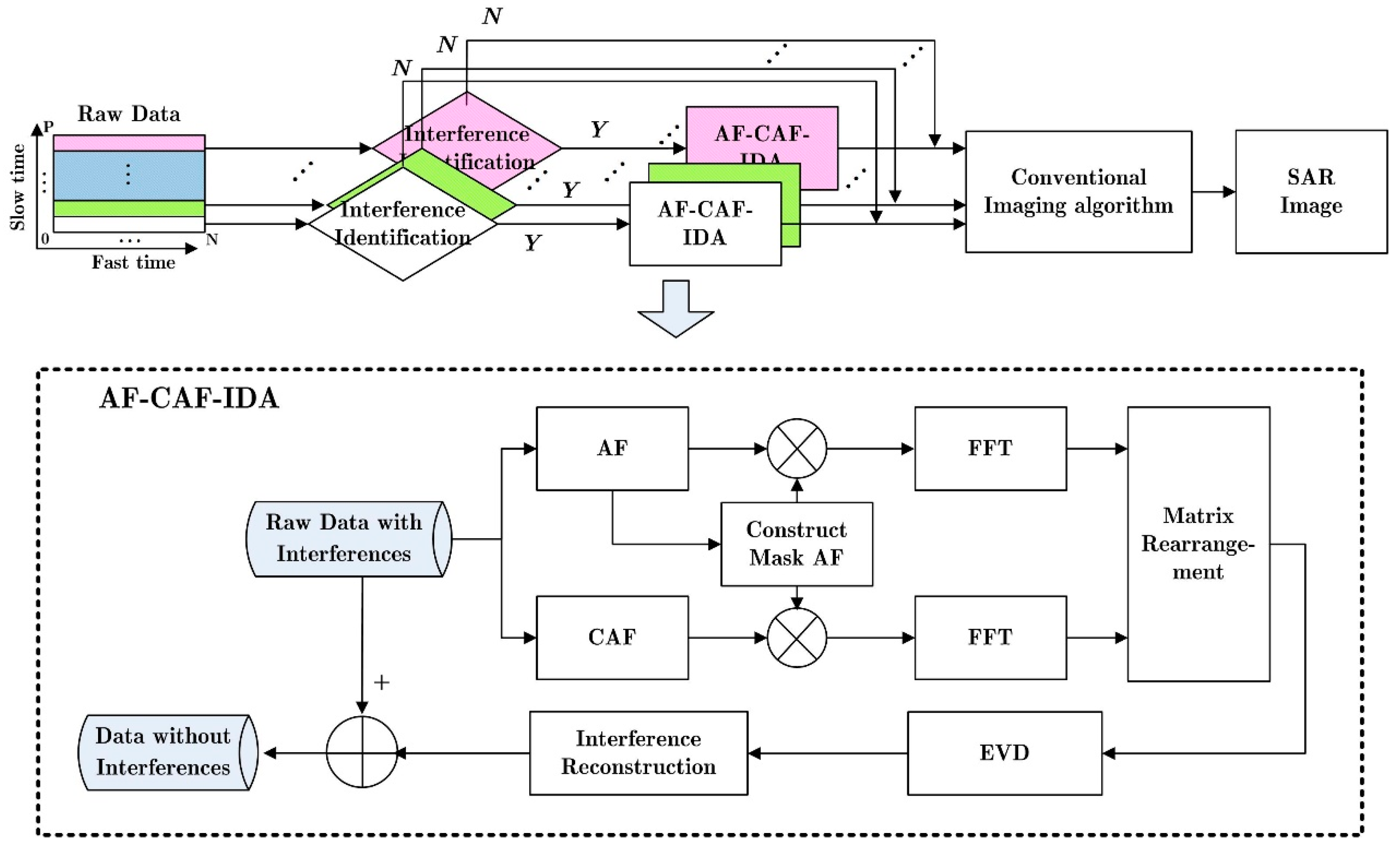
3.4. SAR Imaging with AF-CAF-IDA Based Interference Suppression
- (1)
- Calculate the MAF and MCAF of received signal according to mask algorithm.
- (2)
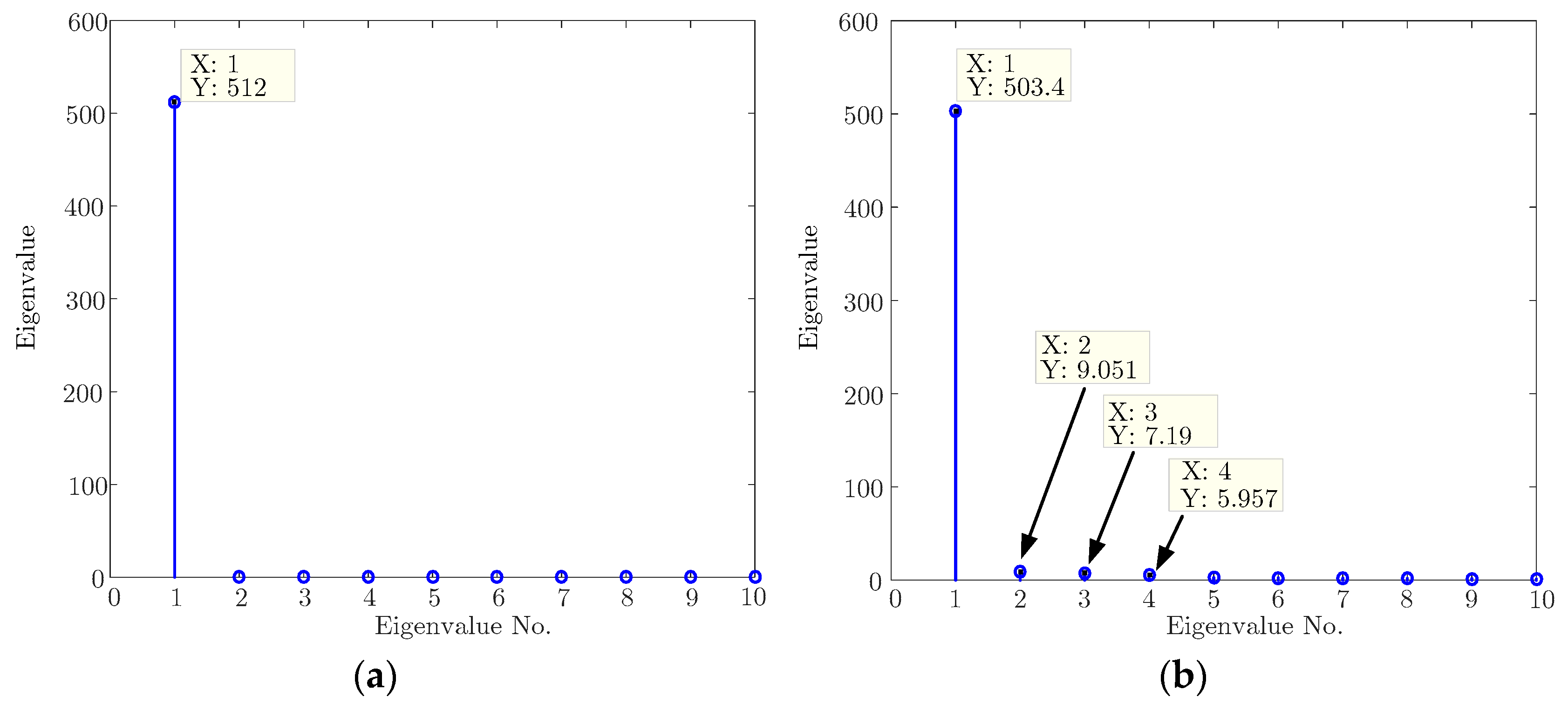
- Rearrange the IFFT of MAF and MCAF and recovery the signal via EVD, and then estimate the parameter by solving the following equation:
- (3)
- Subtract the synthesized component from the received signal and iterate above steps until all interferences in the p-th azimuth sample data are suppressed.
4. Experimental Analysis
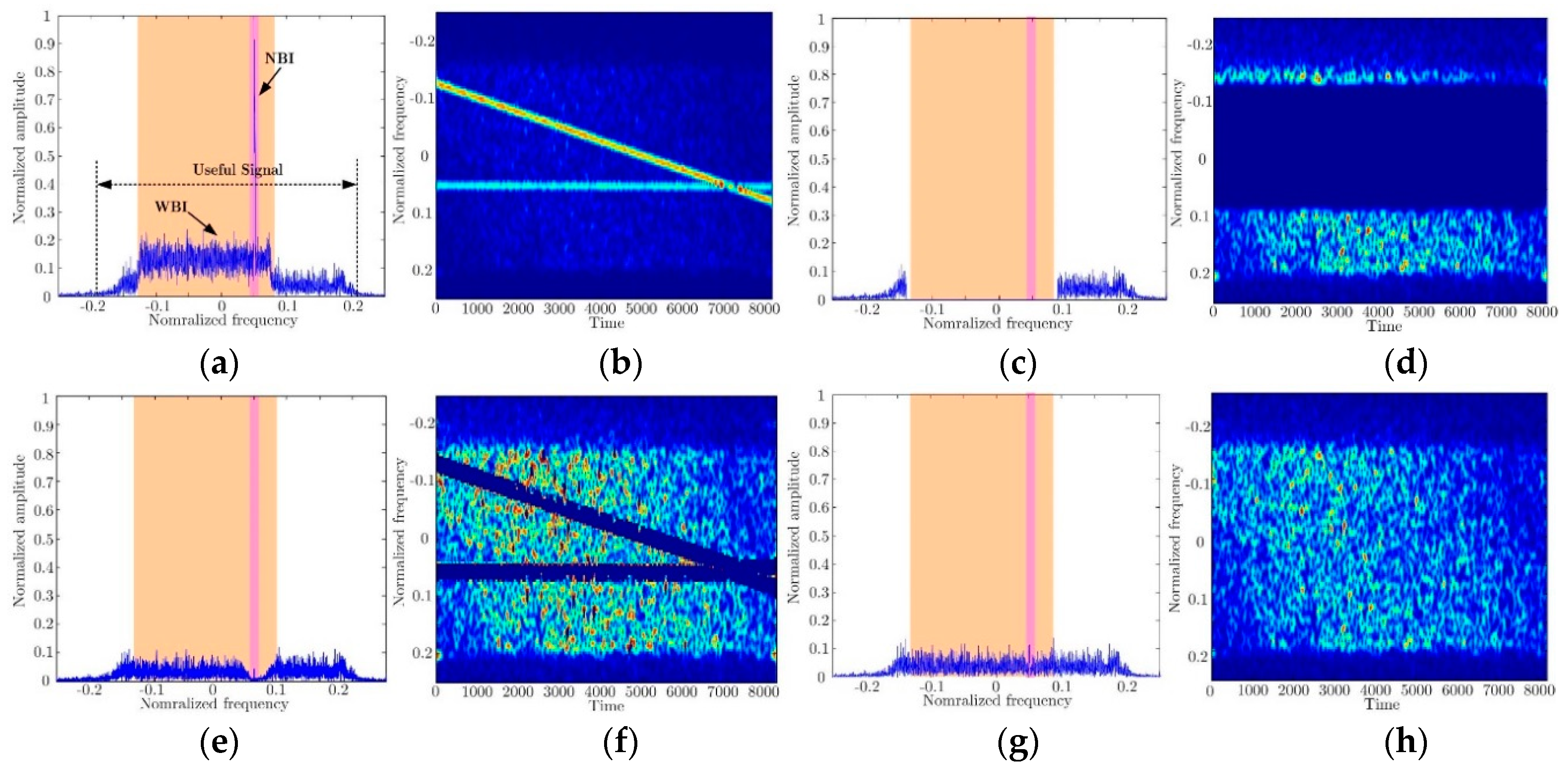
4.1. Comparison between Interference Suppression Algorithms
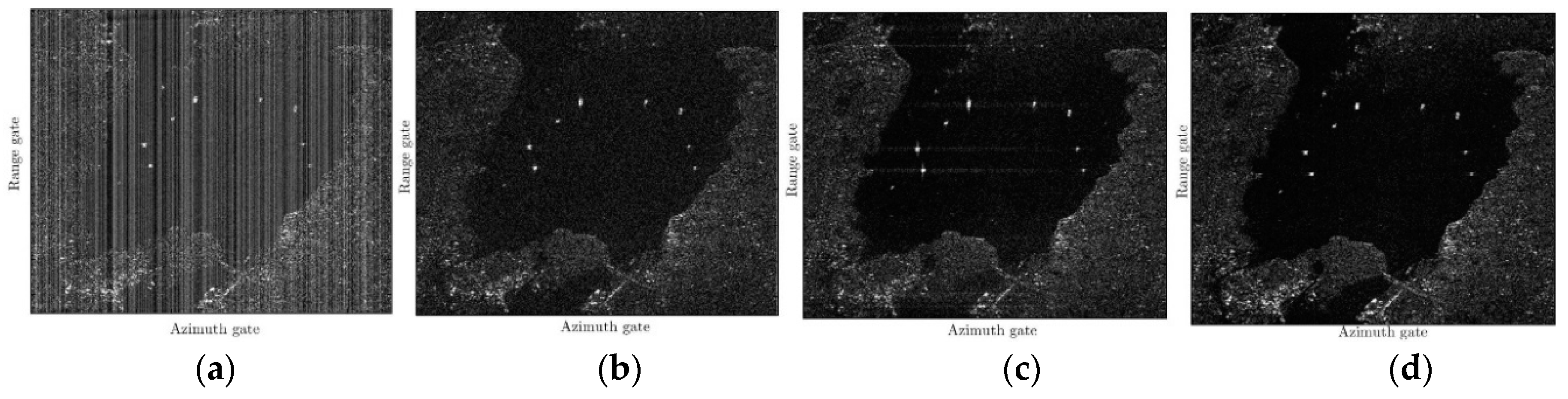
4.2. Results of Measured Data
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Huang, P.; Liao, G.; Yang, Z.; Xia, X.G.; Ma, J.T.; Ma, J. Long-time coherent integration for weak maneuvering target detection and high-order motion parameter estimation based on keystone transform. IEEE Trans. Signal Process. 2016, 64, 4013–4026. [Google Scholar] [CrossRef]
- Zhang, X.; Liao, G.; Zhu, S.; Zeng, C.; Shu, Y. Geometry-information-aided efficient radial velocity estimation for moving target imaging and location based on radon transform. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1105–1117. [Google Scholar] [CrossRef]
- Natsuaki, R.; Motohka, T.; Watanabe, M.; Shimada, M.; Suzuki, S. An autocorrelation-based radio frequency interference detection and removal method in azimuth-frequency domain for SAR Image. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5736–5751. [Google Scholar] [CrossRef]
- Wang, W.-Q.; Shao, H. Radar-to-radar interference suppression for distributed radar sensor networks. Remote Sens. 2014, 6, 740–755. [Google Scholar] [CrossRef]
- Luo, X.; Ulander, L.M.; Askne, J.; Smith, G.; Frolind, P.O. RFI suppression in ultra-wideband SAR systems using LMS filters in frequency domain. Electron. Lett. 2001, 37, 241–243. [Google Scholar] [CrossRef]
- Miller, T.; Potter, L.; Mccorkle, J. RFI suppression for ultra wideband radar. IEEE Trans. Aerospace Electron. Syst. 1997, 33, 1142–1156. [Google Scholar] [CrossRef]
- Load, R.T.; Inggs, M.R. Efficient RFI suppression in SAR using LMS adaptive filter integrated with rang/Doppler algorithm. Electron. Lett. 1999, 35, 629–630. [Google Scholar] [CrossRef]
- Won, J.H.; Pany, T.; Eissfeller, B. Iterative Maximum Likelihood Estimators for High-Dynamic GNSS Signal Tracking. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2875–2893. [Google Scholar] [CrossRef]
- Smith, T.L.; Hill, R.D.; Hayward, S.D.; Yates, G.; Blake, A. Filtering approaches for interference suppression in low-frequency SAR. IEE Proc. Radar Sonar Navig. 2006, 153, 338–344. [Google Scholar] [CrossRef]
- Jayant, H.K.; Rana, K.P.; Kumar, V.; Nair, S.S.; Mishra, P. Efficient IIR notch filter design using Minimax optimization for 50Hz noise suppression in ECG. In Proceedings of the 2015 IEEE International Conference on Signal Processing, Computing and Control, Waknaghat, India, 24–26 September 2015; pp. 290–295. [Google Scholar] [CrossRef]
- Mishra, S.; Das, D.; Kumar, R.; Sumathi, P. A Power-Line Interference Canceler Based on Sliding DFT Phase Locking Scheme for ECG Signals. IEEE Trans. Instrum. Meas. 2014, 64, 132–142. [Google Scholar] [CrossRef]
- Ren, A.; Du, Z.; Li, J.; Hu, F.; Yang, X.; Abbas, H. Adaptive Interference Cancellation of ECG Signals. Sensors 2017, 17, 942. [Google Scholar] [CrossRef] [PubMed]
- Thakor, N.V.; Zhu, Y.S. Applications of adaptive filtering to ECG analysis: Noise cancellation and arrhythmia detection. IEEE Trans. Biomed. Eng. 1991, 38, 785–794. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Wu, R.; Xing, M.; Bao, Z. Eigen subspace-based filtering with application in narrowband interference suppression for SAR. IEEE Geosci. Remote Sens. Lett. 2007, 4, 75–79. [Google Scholar] [CrossRef]
- Zhou, F.; Tao, M.; Bai, X.; Liu, J. Narrow-Band Interference Suppression for SAR Based on Independent Component Analysis. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4952–4960. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Liu, Y.; Zhang, Z. Tensorial Independent Component Analysis-Based Feature Extraction for Polarimetric SAR Data Classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2481–2495. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Liu, J.; Liu, Y.; Zhang, Z.; Bao, Z. Narrow-Band Interference Mitigation for SAR Using Independent Subspace Analysis. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5289–5301. [Google Scholar] [CrossRef]
- Zhou, F.; Xing, M.; Bai, X.; Sun, G.; Bao, Z. Narrowband interference suppression for SAR based on complex empirical mode decomposition. IEEE Geosci. Remote Sens. Lett. 2009, 6, 423–427. [Google Scholar] [CrossRef]
- Huang, Y.; Liao, G.; Li, J.; Xu, J. Narrowband RFI suppression for SAR system via fast implementation of joint sparsity and low-rank property. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2748–2761. [Google Scholar] [CrossRef]
- Darsena, D.; Gelli, G.; Paura, L.; Verde, F. NBI-resistant zero-forcing equalizers for OFDM systems. IEEE Commun. Lett. 2005, 9, 744–746. [Google Scholar] [CrossRef]
- Redfern, A.J. Receiver window design for multicarrier communication systems. IEEE J. Sel. Areas Commun. 2002, 20, 1029–1036. [Google Scholar] [CrossRef]
- Ding, M.; Redfern, A.J.; Evans, B.L. A dual-path TEQ structure for DMT-ADSL systems. In Proceedings of the 2002 IEEE International Conference on Acoustics, Speech, and Signal Processing, Orlando, FL, USA, 2002; pp. III-2573–III-2576. [Google Scholar] [CrossRef]
- Ma, X.Y.; Qin, J.M.; He, Z.H.; Yang, J.; Lu, Q.H. Three-channel cancellation of SAR blanketing jamming suppression. Acta Electron. Sin. 2007, 35, 1015–1020. [Google Scholar]
- Wang, H.L. Comparative analysis of adaptive beamforming algorithms for satellite multiple-beam antennas. Acta Electron. Sin. 2001, 29, 358–360. [Google Scholar]
- Liu, H.; Li, D.; Zhou, Y.; Truong, T.K. Simultaneous Radio Frequency and Wideband Interference Suppression in SAR Signals via Sparsity Exploitation in Time-Frequency Domain. IEEE Trans. Geosci. Remote Sens. 2018, 1–14. [Google Scholar] [CrossRef]
- Elgamel, S.A.; Soraghan, J.J. Using EMD-FrFT filtering to mitigate very high power interference in chirp tracking radars. IEEE Signal Process. Lett. 2011, 18, 263–266. [Google Scholar] [CrossRef] [Green Version]
- Peleg, S.; Friedlander, B. The discrete polynomial-phase transform. IEEE Trans. Signal Process. 1995, 43, 1901–1914. [Google Scholar] [CrossRef]
- Porat, B.; Friedlander, B. Asymptotic statistical analysis of the high-order ambiguity function for parameter estimation of polynomial-phase signals. IEEE Trans. Inf. Theory 1996, 42, 995–1001. [Google Scholar] [CrossRef]
- Djukanovic, S.; Popovic, V. A Parametric Method for Multicomponent Interference Suppression in Noise Radars. IEEE Trans. Aerospace Electron. Syst. 2012, 48, 2730–2738. [Google Scholar] [CrossRef]
- Barbarossa, S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform. IEEE Trans. Signal Process. 1995, 43, 1511–1515. [Google Scholar] [CrossRef]
- Wood, J.C.; Barry, D.T. Radon transformation of time-frequency distributions for analysis of multicomponent signals. IEEE Trans. Signal Process. 1994, 42, 3166–3177. [Google Scholar] [CrossRef]
- Wang, M.; Chan, A.K.; Chui, C.K. Linear frequency-modulated signal detection using Radon-ambiguity transform. IEEE Trans. Signal Process. 1998, 46, 571–586. [Google Scholar] [CrossRef]
- Su, J.; Tao, H.H.; Rao, X.; Xie, J.; Guo, X.L. Coherently integrated cubic phase function for multiple LFM signals analysis. Electron. Lett. 2015, 51, 411–413. [Google Scholar] [CrossRef]
- Sergio, B.; Anna, S. Adaptive time-varying cancellation of wideband interference in spread-spectrum communications based on time-frequency distributions. IEEE Trans. Signal Process. 1999, 47, 957–965. [Google Scholar] [CrossRef]
- Li, Y.; Ye, L.; Sha, X. Time-Frequency Energy Sensing of Communication Signals and Its Application in Co-Channel Interference Suppression. Sensors 2018, 18, 2378. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Xing, M.; Guo, R.; Zhang, L.; Bao, Z. Interference Suppression Algorithm for SAR based on time–frequency transform. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3765–3779. [Google Scholar] [CrossRef]
- Zhao, T.; Zhang, Y.; Yang, L.; Dong, Z.; Liang, D. The RFI suppression method based on STFT applied to SAR. Prog. Electromagn. Res. M 2013, 31, 171–188. [Google Scholar] [CrossRef]
- Yang, Z.; Du, W.; Liu, Z.; Liao, G. WBI Suppression for SAR Using Iterative Adaptive Method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1008–1014. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Zhang, Z. Wideband Interference Mitigation in High-Resolution Airborne Synthetic Aperture Radar Data. IEEE Trans. Geosci. Remote Sens. 2015, 54, 74–87. [Google Scholar] [CrossRef]
- Lao, G.; Yin, C.; Ye, W.; Sun, Y.; Li, G. A Frequency Domain Extraction Based Adaptive Joint Time Frequency Decomposition Method of the Maneuvering Target Radar Echo. Remote Sens. 2018, 10, 266. [Google Scholar] [CrossRef]
- Su, J.; Tao, H.; Tao, M.; Wang, L.; Xie, J. Narrow-Band Interference Suppression via RPCA-Based Signal Separation in Time–Frequency Domain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 5016–5025. [Google Scholar] [CrossRef]
- Boudreaux-Bartels, G.; Parks, W. Time-varying filtering and signal estimation using Wigner distribution synthesis techniques. IEEE Trans. Acoust. Speech Signal Process. 1986, 34, 442–451. [Google Scholar] [CrossRef]
- Zuo, L.; Li, M.; Zhang, X.; Wang, Y.; Wu, Y. An Efficient Method for Detecting Slow-Moving Weak Targets in Sea Clutter Based on Time–Frequency Iteration Decomposition. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3659–3672. [Google Scholar] [CrossRef]
- Li, D.; Liu, H.; Yang, L. Efficient time-varying interference suppression method for synthetic aperture radar imaging based on time-frequency reconstruction and mask technique. IET Radar Sonar Navig. 2015, 9, 827–834. [Google Scholar] [CrossRef]
- Sharif, M.R.; Abeysekera, S.S. Efficient wideband signal parameter estimation using a radon-ambiguity transform slice. IEEE Trans. Aerospace Electron. Syst. 2007, 43, 673–688. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronyms | Terms | Acronyms | Terms |
|---|---|---|---|
| SAR | Synthetic Aperture Radar | STFT | Short Time Fourier Transform |
| NBI | Narrowband interference | WD | Wigner Distribution |
| WBI | wideband interference | AF | Ambiguity Function |
| SNR | Signal-to-Noise Ratio | CAF | Cross Ambiguity Function |
| IDM | Iterative Decomposition Method | MAF | Masked Ambiguity Function |
| SSM | Signal Synthesis Method | RT | Radon Transform |
| EVD | Eigenvalue Decomposition | RAF | Radon Ambiguity Function |
| Algorithm | Notch filter | TF filter | AF-CAF-IDA |
|---|---|---|---|
| SDR (dB) | −2.1216 | −8.8797 | −11.4218 |
| Algorithm | Notch Filter | TF Filter | AF-CAF-IDA |
|---|---|---|---|
| SNR (dB) | 27.45 | 32.38 | 33.15 |
| Contrast (dB) | 59.99 | 65.80 | 68.43 |
| Algorithm | Notch Filter | TF Filter | AF-CAF-IDA |
|---|---|---|---|
| SNR (dB) | 16.57 | 19.24 | 25.36 |
| Contrast (dB) | 78.15 | 80.04 | 83.36 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, J.; Tao, H.; Tao, M.; Xie, J.; Wang, Y.; Wang, L. Time-Varying SAR Interference Suppression Based on Delay-Doppler Iterative Decomposition Algorithm. Remote Sens. 2018, 10, 1491. https://doi.org/10.3390/rs10091491
Su J, Tao H, Tao M, Xie J, Wang Y, Wang L. Time-Varying SAR Interference Suppression Based on Delay-Doppler Iterative Decomposition Algorithm. Remote Sensing. 2018; 10(9):1491. https://doi.org/10.3390/rs10091491
Chicago/Turabian StyleSu, Jia, Haihong Tao, Mingliang Tao, Jian Xie, Yuexian Wang, and Ling Wang. 2018. "Time-Varying SAR Interference Suppression Based on Delay-Doppler Iterative Decomposition Algorithm" Remote Sensing 10, no. 9: 1491. https://doi.org/10.3390/rs10091491
APA StyleSu, J., Tao, H., Tao, M., Xie, J., Wang, Y., & Wang, L. (2018). Time-Varying SAR Interference Suppression Based on Delay-Doppler Iterative Decomposition Algorithm. Remote Sensing, 10(9), 1491. https://doi.org/10.3390/rs10091491