1. Introduction
Disaster risk management (DRM) comprises four distinct phases: Mitigation, preparedness, response, and recovery. Post-disaster recovery (PDR) is generally described as the process of returning to a normal condition after a period of difficulties [
1]. However, recovery has been recognized as a complex and arduous process that in minor cases can be evaluated in months or years, and in extreme cases in decades, mainly because of the involvement of various stakeholders and the multi-phase nature of the PDR process [
2]. Recovery comprises four distinct aspects that partially overlap: The built environment that recovery is often reduced to, but also the social, natural, and economic aspects, of which each includes further subdomains [
3].
Although large-scale natural disasters can extensively damage an affected area and community, disasters and the subsequent recovery processes also bring opportunities for disaster-stricken communities. Within a recovery process, pre-existing vulnerabilities can be identified and addressed, with the post-disaster window of opportunity allowing the central Sendai Framework pillar of Building-Back-Better to be realized [
4]. The priority of the Sendai Framework in the recovery phase is enhancing disaster preparedness for an effective response to “Build Back Better” (BBB). BBB is the concept that uses the recovery process not only to build back an affected area to the pre-disaster situation through physical rebuilding, but also to improve living and environmental conditions through risk reduction measures, resulting in more resilient and sustainable communities [
5,
6]. BBB provides a holistic recovery framework that considers both physical and functional recovery, while conventional thinking of recovery is based on Building Back (BB) areas to the pre-disaster level, considering only the physical recovery. The additional functional recovery describes how a community is functioning after a disaster, which can only be observed indirectly in remote sensing imagery, e.g., the change of functionality of (critical) buildings.
After large disasters, a considerable amount of money from donors and governments is often made available to finance the recovery to reach the recovery goals [
2]. During the recovery, its progress needs to be monitored to assess what has been achieved and where readjustment is required. Thus, recovery assessment is vital for policymakers and donors, while it also improves the transparency of the process, the capability of executing agencies for on-going works, and it supports auditing efforts and accountability [
7]. Furthermore, the quality and the speed of the recovery process can be used as indicators of the resilience of an affected community [
8]. Resilience can be assessed via the residual functionality after a disaster (robustness), and by the speed of functional recovery to a normal situation; i.e., pre-disaster norm or a new equilibrium. Besides, monitoring of risks is essential and is a continual process, since risks continually change. One of the main purposes of post-disaster risk assessment is to identify any secondary risks. Therefore, recovery assessment can also be used as a basis for effective post-disaster risk assessment [
9].
Although a systematic assessment of the recovery process is important for all stakeholders, it has been described as the least understood phase of disaster management [
10]. No comprehensive models exist to measure recovery over time [
11]. Conventional recovery assessment studies focus on the built-up environment and short-term evaluation of damaged buildings and their recovery status, or on the community level through social audit methods [
7]. The latter cover ground-based techniques such as household survey, which cannot cover all aspects of integrated recovery, specifically over large areas, while also being time- and money-consuming and prone to subjectivity [
8]. Social audits are mainly used to collect and combine the data regarding the timing and the quality of the process, as well as people’s perception of the process. The result of those types of recovery assessment methods is normally qualitative reports with limited practical usability for decision makers [
12,
13].
Remote Sensing (RS) has been shown to be a cost-effective source of spatial information for all aspects of disaster risk [
14]. The availability of remotely sensed datasets before and after an event, as well as growing image archives, also allows for an increasingly effective use of RS in recovery assessment. However, the utility of RS to support and monitor the recovery is the least developed application in the DRM cycle [
15]. RS can greatly contribute to monitor and assess the recovery process through facilitating time-series analysis over large areas and at short intervals.
In RS-based recovery assessment most of the developed methods and data-types have focused on the physical recovery [
15]. For instance, video data allow us to analyze the accessibility problems of remote places [
16]. Brown et al. [
7] used indicator-based methods based on Very High Resolution (VHR) satellite imagery combined with social audits for recovery assessment. Their indicators are mostly at building-level and thus expensive and time-consuming to collect, due to manual extraction from RS images, while lacking practicality, e.g., clean or dirty swimming pools. Although those indicators can be helpful to a limited extent, they do not reveal recovery information on a practical scale. Besides, the image analysis technique used (maximum likelihood classification) assumes a normal data distribution, which is not appropriate for VHR images [
17]. Hoshi et al. [
18] used a ground survey in combination with remote sensing, employing visual interpretation and binary classification methods to monitor post-disaster urban recovery.
Recent studies have focused on post-fire recovery using vegetation indices to evaluate greenness recovery from satellite imagery [
19,
20,
21]. Thus, the few image analysis methods used for recovery assessment tend to be rather dated, not suitable for VHR imagery, and do not use suitable image processing developments (e.g., machine learning techniques). Also most of the current literature tends to be limited to a particular and relatively small area [
22], which can limit the strength of the scientific findings since there is no consideration of spatial extrapolation or transferability of the method, while recovery information is commonly required for large areas, and generic rather than country-specific assessment methods are needed. Hence, there is a need to develop a more comprehensive RS-based methodology using recent image analysis methods.
Artificial Neural Network (ANN) and more recent Convolutional Neural Network (CNN) [
23,
24] has the ability to retrieve complex patterns and learning features from the data. CNN has shown advantages over other ML methods [
25]; however, its hidden layer is a black box and the overall accuracy is highly dependent on the amount of training data. Moreover, CNN is not easy to use and computationally is expensive, that normally needs dedicated hardware to handle the process. On the other hand, recent studies show state-of-the-art Machine Learning (ML) methods such as SVM, a relatively easily implementable method, can handle learning tasks with a small training dataset (i.e., is the case of disaster situations), yet shows competitive results with CNNs [
26]. The performance of SVM is good for complex datasets; such as urban-rural setting in developing countries, where the performance of random forest (RF) is data-dependent and mainly performs well for non-complex datasets [
25,
27].
Disasters and recovery processes significantly influence land cover (LC) and land use (LU) [
28]. LCLU information has been widely explored in different fields of remote sensing; however, the value of LCLU information has not been studied well in the recovery literature. Land cover and land use change (LCLUC) is a robust indicator with high explanatory power across the disaster-stricken area and over time, which also can be used to assess how well the affected area is recovered [
10].
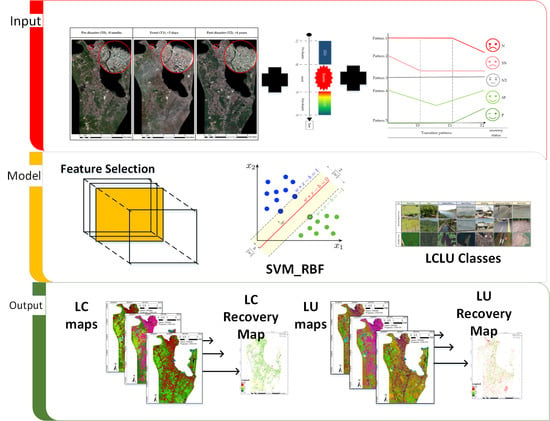
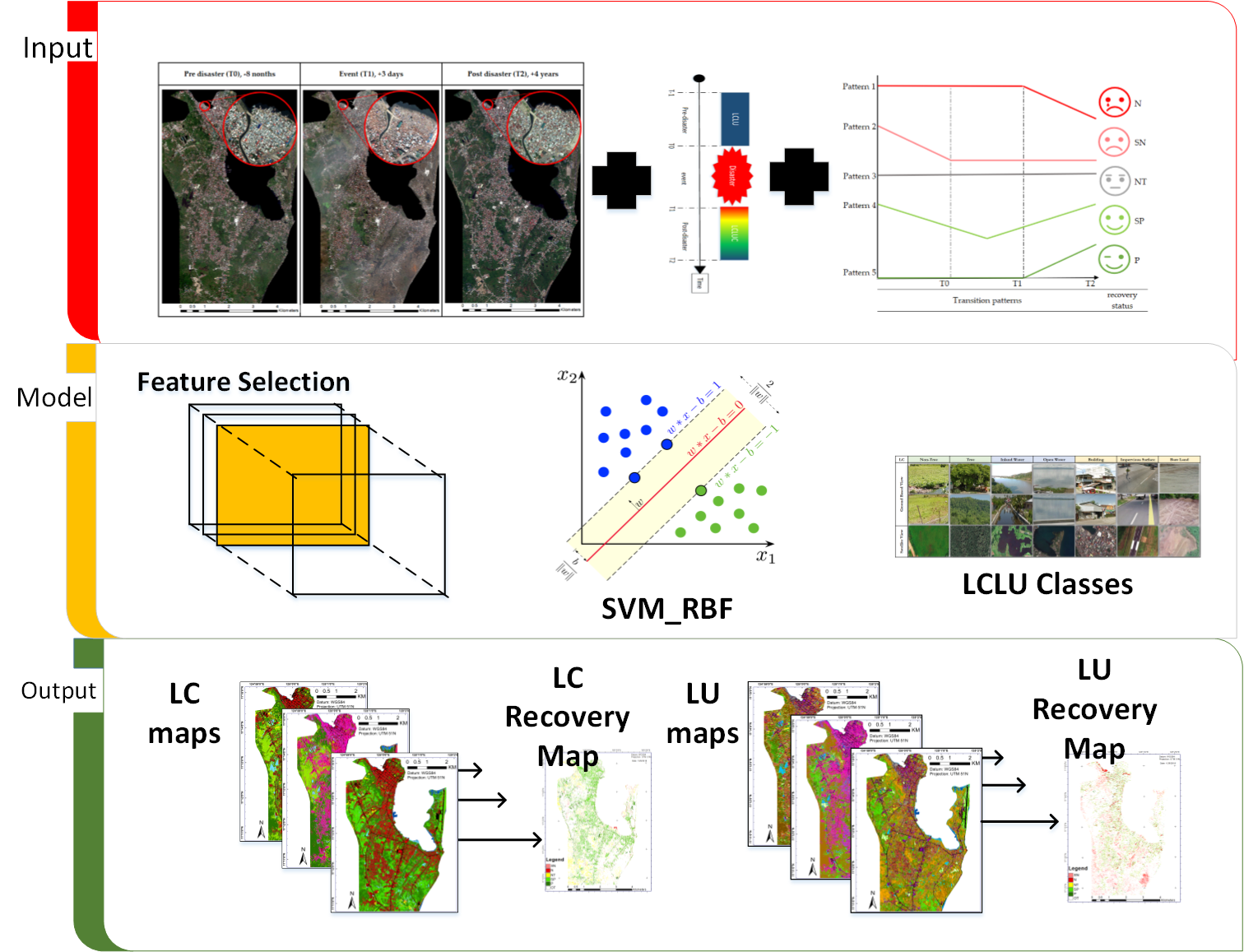
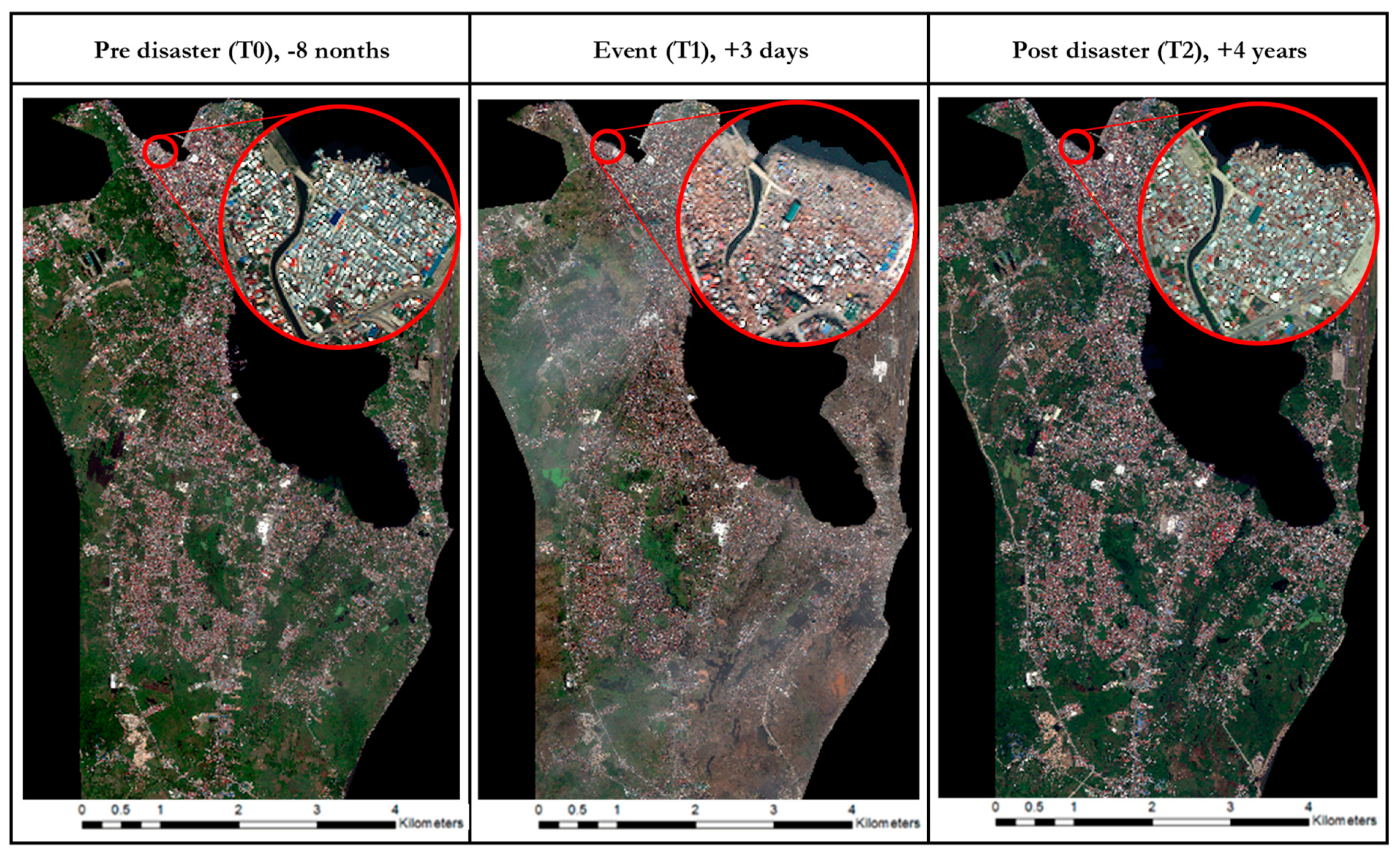
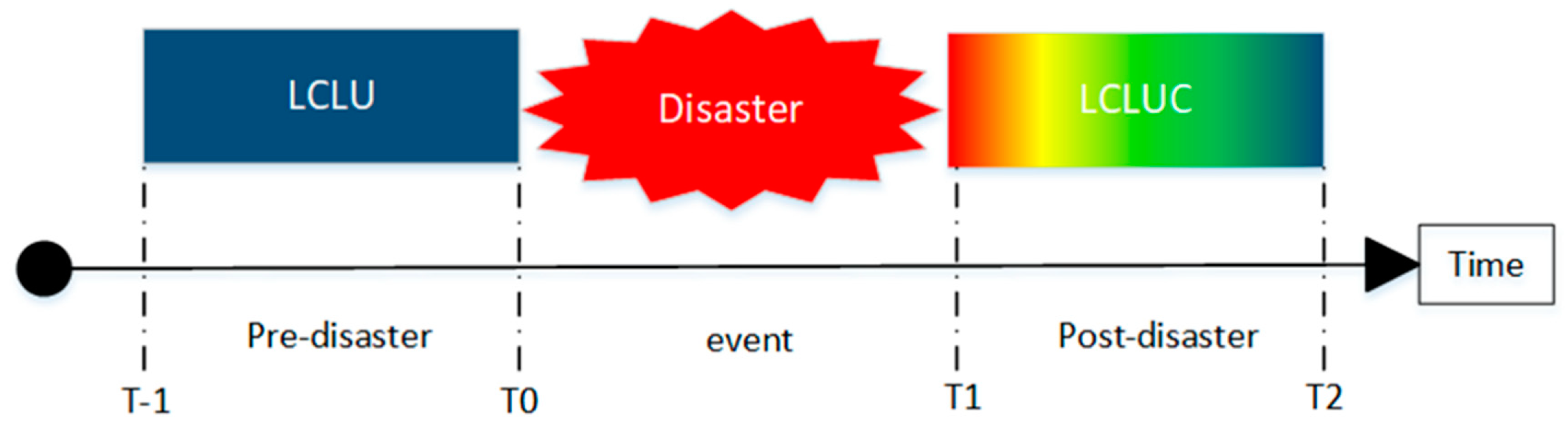
The aim of this paper is to investigate the utility of LCLUC information to assess PDR, using VHR satellite images and machine learning. For this, a new RS-based methodology was developed that gives value judgments on unique trajectories of changes; e.g., positive and negative recovery. Support Vector Machine (SVM) was used for the classification of three WorldView-2 images. The suitability of image features was investigated and those with high discriminative power were selected for the LC and LU classification task. A code was developed for the post-classification change assessment, based on which meaningful changes during the PDR process were mapped, i.e., LC- and LU-based recovery maps. Subsequently, the usefulness of LCLU information was discussed. The urban and rural area of Tacloban city in the Philippines was selected as a test, and PDR was assessed in the context of typhoon Haiyan, over a period of 5 years. Tacloban city was hit by Super Typhoon Haiyan on 8 November 2013, the strongest ever typhoon recorded worldwide that officially caused more than 5000 fatalities [
29]. Tacloban city was selected for this purpose as it includes relatively complex land cover and land use patterns that are suitable to characterize PDR sectors (social, natural, economic, and built environment).
4. Discussion
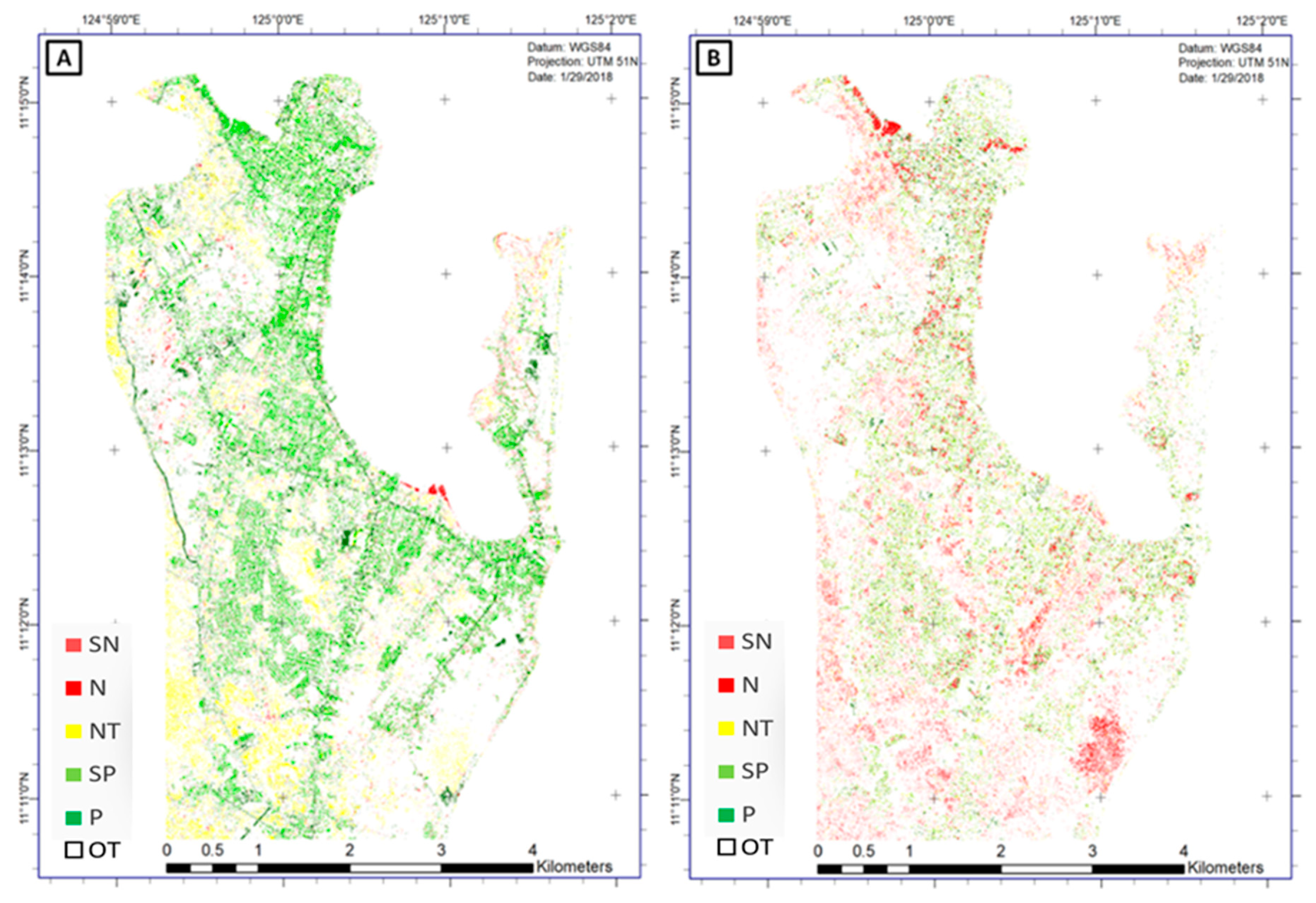
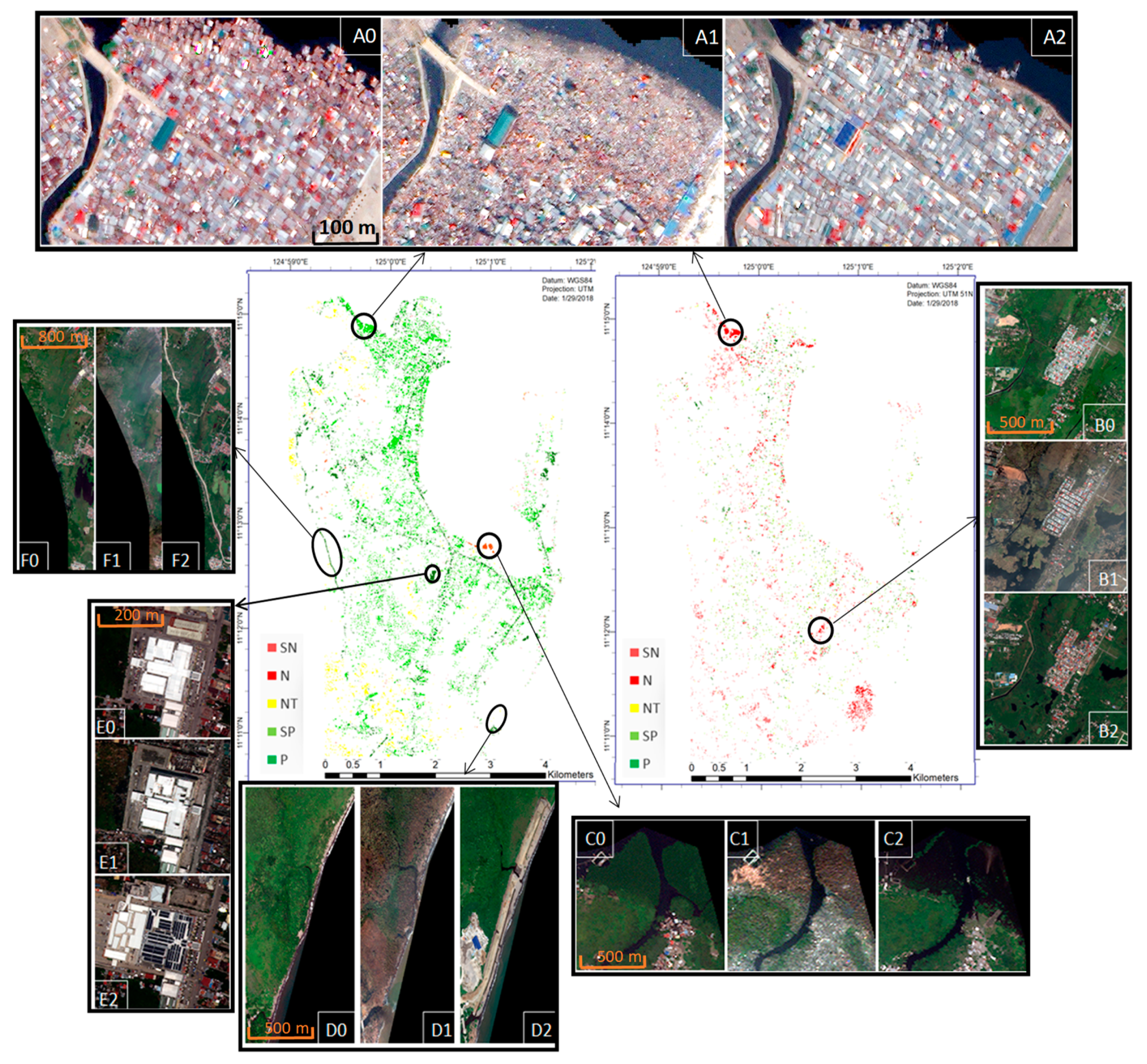
This research investigated the usefulness of LCLUC information through an RS-based CF for post-disaster recovery assessment. The developed CF largely captures the recovery process within three time steps. The CF is helpful for understanding the recovery processes and also for generating associated change maps. In the light of the CF, both physical and functional recovery were explored, leading to a holistic understanding of the recovery process. This study confirmed the initial hypothesis and showed that the LC-based recovery map primarily reveals physical aspects of recovery, while also being capable of generating a quick and reliable recovery insight over large areas. The LU-based recovery map, on the other hand, is more closely linked with the functional recovery assessment, where for instance changes in cash crop types (palm tree to crop land) and the state of residential areas (IBA to FBA) are influential factors to characterize PDR. However, in order to increase the generalization capacity and to support a deeper understanding of the recovery process, the CF could be refined by additional contextual factors (e.g., socio-economic data) of the affected area corresponding to each image.
Since providing LC information is easier and cheaper than LU, LC can serve as a basic layer that provides insights in the early stage of recovery process, with accurate results over large areas. LU-derived information can then be more effectively used in areas of uncertainty, or where more detailed information is required. Moreover, in the LC recovery map it is observed that the areas belonging to the classes SP and SN are the areas of extensional uncertainty, which ultimately need to be defined as N and or P. Overall, LC information is helpful for large areas, providing information on short-term recovery, while LU information is more helpful in a focused target classification for some specific aspects of recovery (e.g., economic recovery) and for some specific regions, allowing for detection of medium to long-term recovery activities.
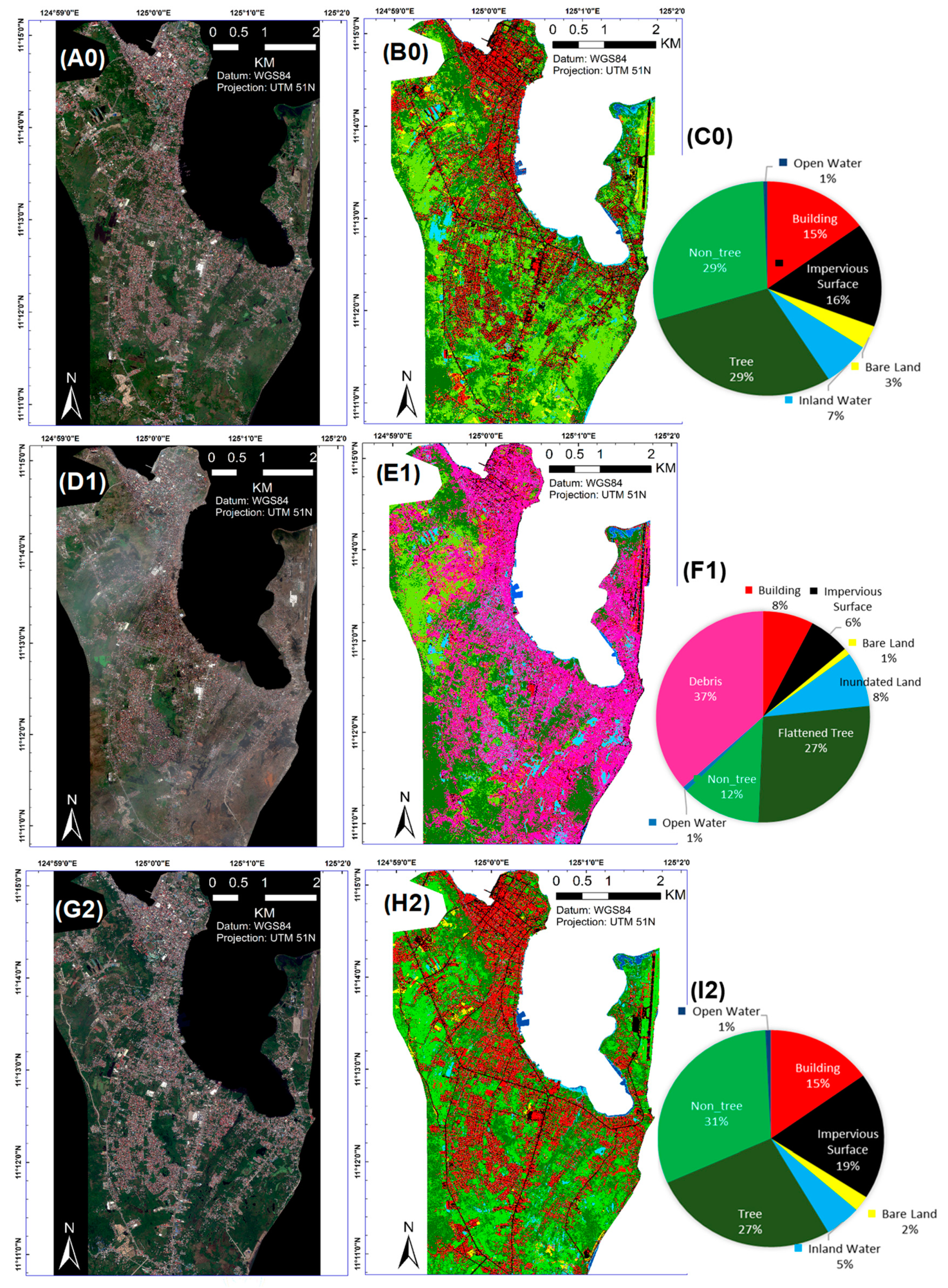
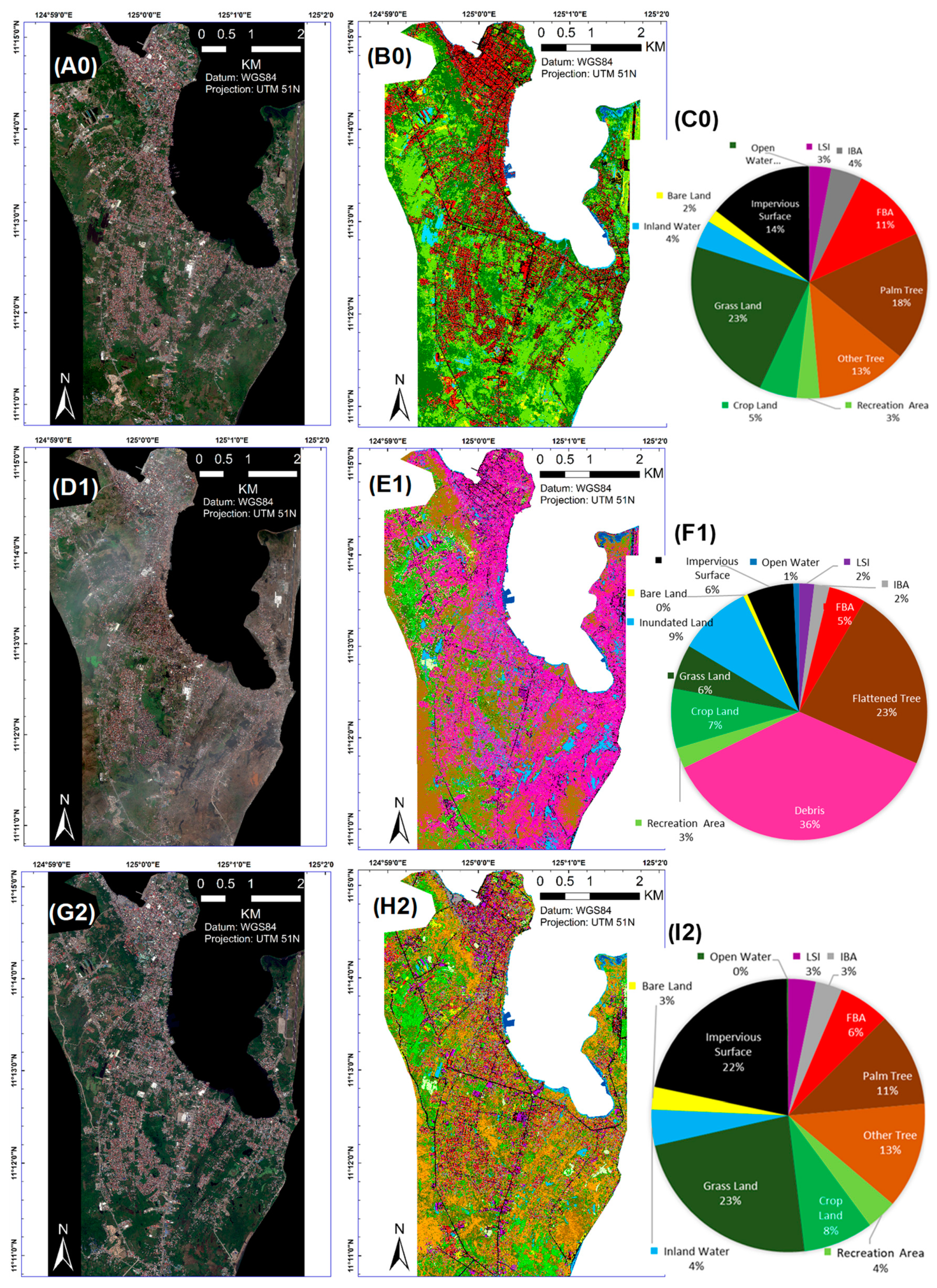
Damage estimation is critical in the relief and recovery process, and understanding and measuring damage types (structural and nonstructural damage) is an important step towards understanding and measuring the recovery process. Although the classifications of the T1 image showed high accuracy, complexity, and heterogeneity of the scene 3 days after Super Typhoon Haiyan [
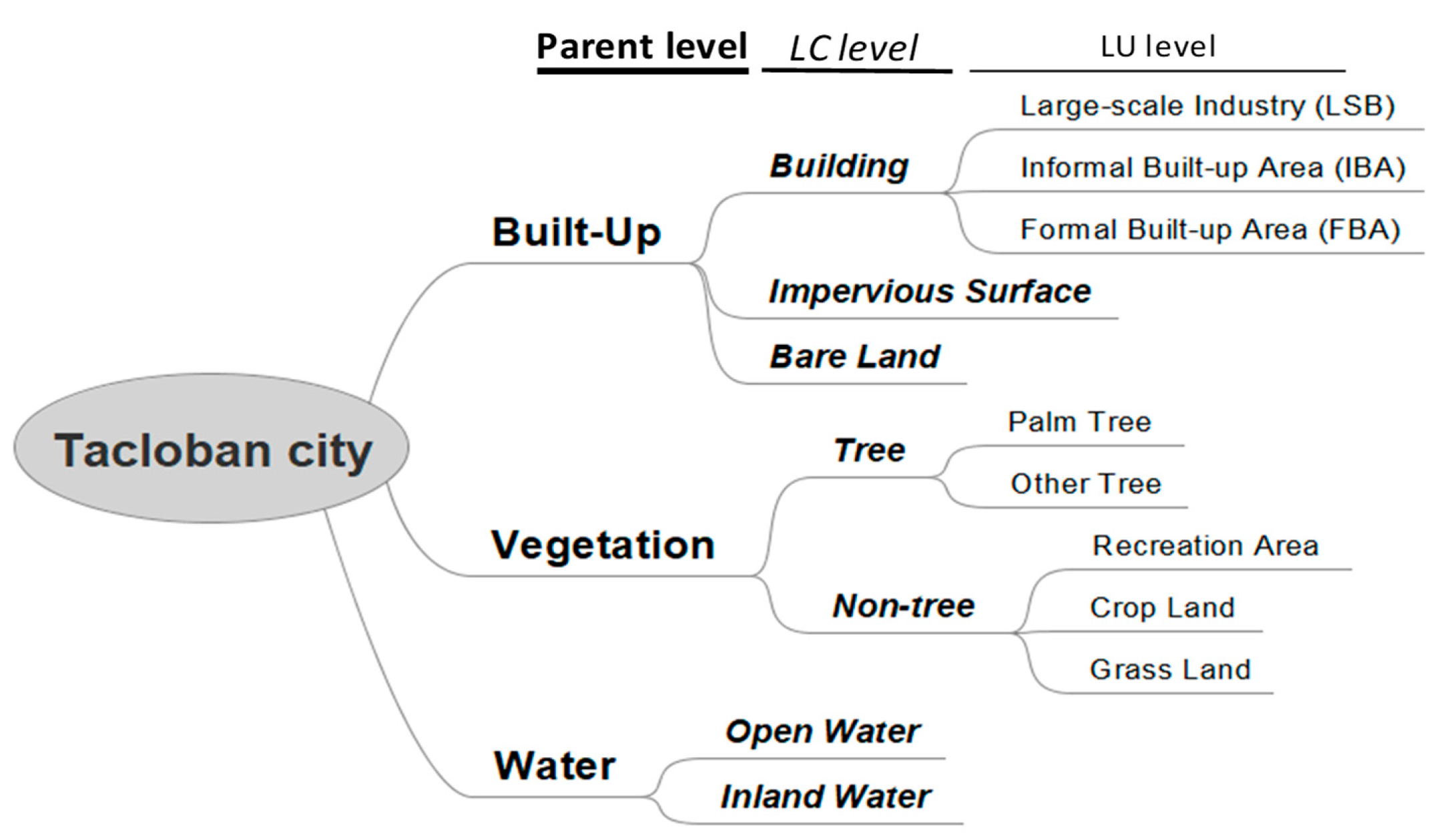
45], combined with the large and diverse number of classes involved in the LC and LU maps (7 and 12 classes, respectively) [
46] and the relatively modest spatial resolution of the images (specifically for detailed urban mapping; 2 m) to differentiate the rate and type of damage [
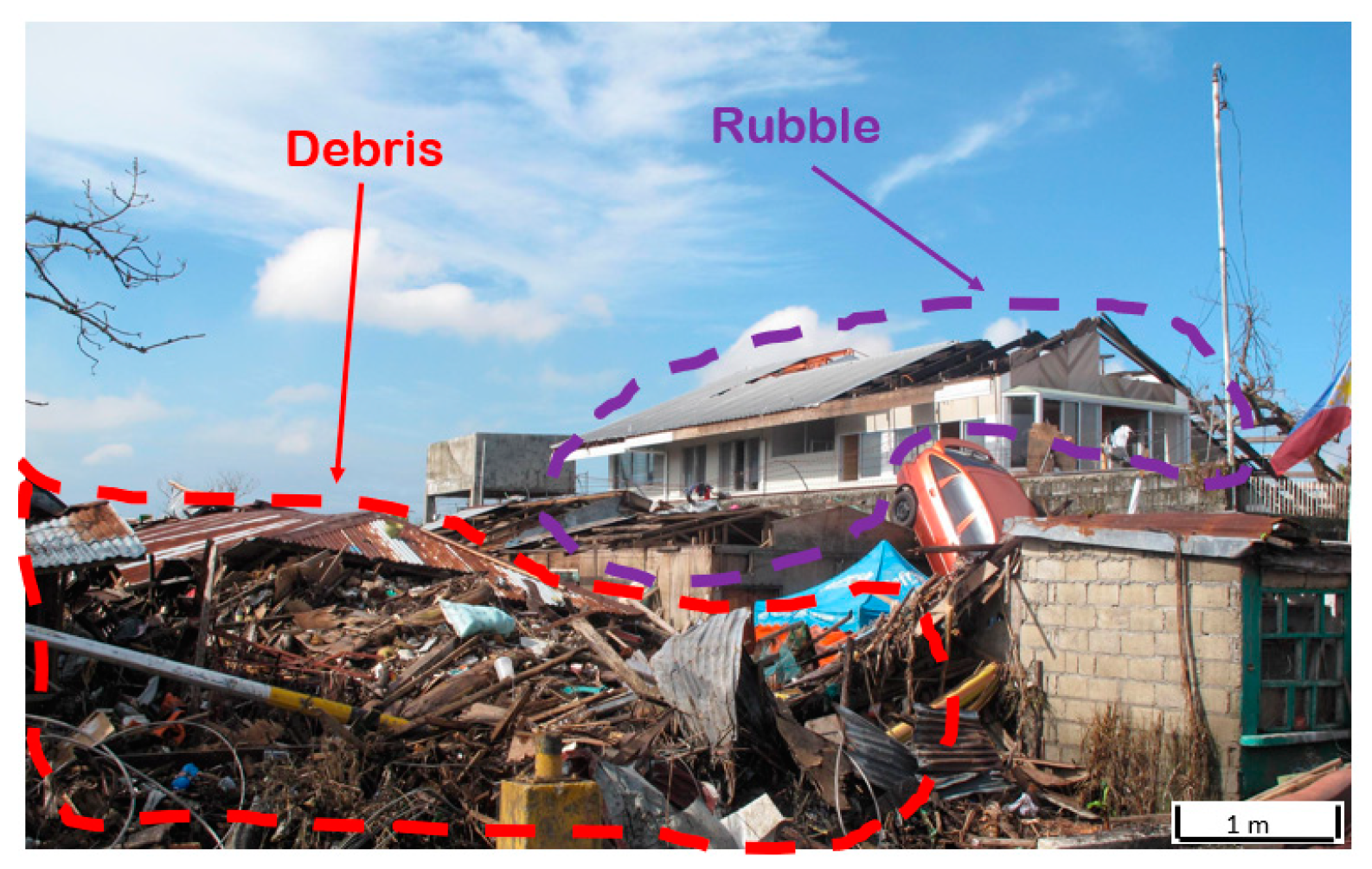
47], led to an overestimation of the area covered by debris (almost 37% of the area in T1). The uncertainty affected all TPs in the recovery maps that contain debris which might suggest a higher level of damage than in reality, and in turn a better recovery assessment. The most important TP,
building,
debris,
building, played a significant role in the LC recovery map, resulting in a more greenish map (indicating positive recovery), which partly reflected the real recovery situation in Tacloban. It is recommended for future studies to differentiate better between structural damage and other objects next to buildings or on top of streets (in this case objects such as moved cars, vegetation matter, etc., moved and deposited by heavy wind and water). Using a higher spatial resolution and adding oblique images of buildings (for example acquired by UAV), [
48] in combination with deep learning methods can improve the classification of event image and eventually the recovery maps [
25,
49]. Damage degrees (severity of damage) vary across space and time, yet the corresponding uncertainty was not fully captured in the developed framework, i.e., in T1 and T2, where the degree of damage and rebuilding are assumed to be discrete. Nevertheless, different levels of damage exist, ranging from complete collapse to cracks in the building roof or façades [
50,
51], as well as different degrees of rebuilding [
52].
CNN, in the work of Mboga et al. [
34], leads a better classification of built-up classes as compared to SVM, where accuracies were competitive but the computational costs differed substantially. Besides, CNN requires huge training data, which are difficult to supply in a case where ground truth data are limited (e.g., in disaster situation for damage classes), and also it is computationally very expensive without dedicated hardware (e.g., GPU) [
24], makes it less suitable as a classifier compared to SVM in the current research. Regarding the vegetation-related classes, the results of SVM confirmed those of Ozdogan et al. [
53] over a large area, while not corresponding well with the results of Mathur et al. [
54] at a more local scale. Uncertainty due to mixed-unit classes in the LU level is conditional upon the temporal and spatial variability of the spectral signature of the classes in question. Thus, a careful definition of mixed-unit classes at LU level would improve mapping of the heterogeneous scene, as mentioned in the work of Herold et al. [
55]. Moreover, appropriate images must be available for the temporal approach to provide a complete vegetation phenology of the focus crop types, before, and delayed vegetation phenology, after a disaster [
53]. Therefore, understanding vegetation-related changes after a disaster requires an understanding of the regular vegetation phenology prior to the disaster. Hence, considering more than the 3-time steps used in this study would greatly benefit vegetation recovery assessment. Moreover, to capture a fuller view of recovery assessment, this study suggests using of another image within a range of 3-months after a disaster. This would effectively support quick monitoring needs of stakeholders and allows a better estimation of debris volume and removal [
56].
Recovery information is specific for a disaster-stricken area and is related to a certain period. Thus, recovery is a geographic phenomenon that is made up of transition patterns tied to geographic objects [
57]. When recovery information about coverage, capacity, and connectedness is needed at a city level, recovery information can be aggregated. It is also clear that with the high potential and flexibility of TPs to create recovery maps, the mapping approach could potentially be misused and manipulated. As shown with the divergent LC and LU-based recovery maps, it is possible to create assessments that emphasize the positive side of recovery, such as by focusing on physical recovery.
The LCLU and recovery maps are necessary to support decision making, planning in support of post disaster recovery, and eventually post-disaster risk management [
11]. For instance, the maps can be used to decide if a highly exposed informal settlement should be relocated to a less hazardous area. This information could be used to guide municipalities and local authorities to properly allocate resources, including funding and technology for recovery projects in the long term within the concept of BBB, while they could also be used to evaluate land use plans in a timely manner [
7]. Image-based recovery maps are also far less expensive tools compared to fully ground-based surveys and social audits. Image-based recovery maps provide detailed insights for donors to track the impact of their investments in the affected areas. Besides, recovery maps can indicate where ground-based techniques might be relevant to gain more detailed insights (e.g., areas of uncertainties).
5. Conclusions
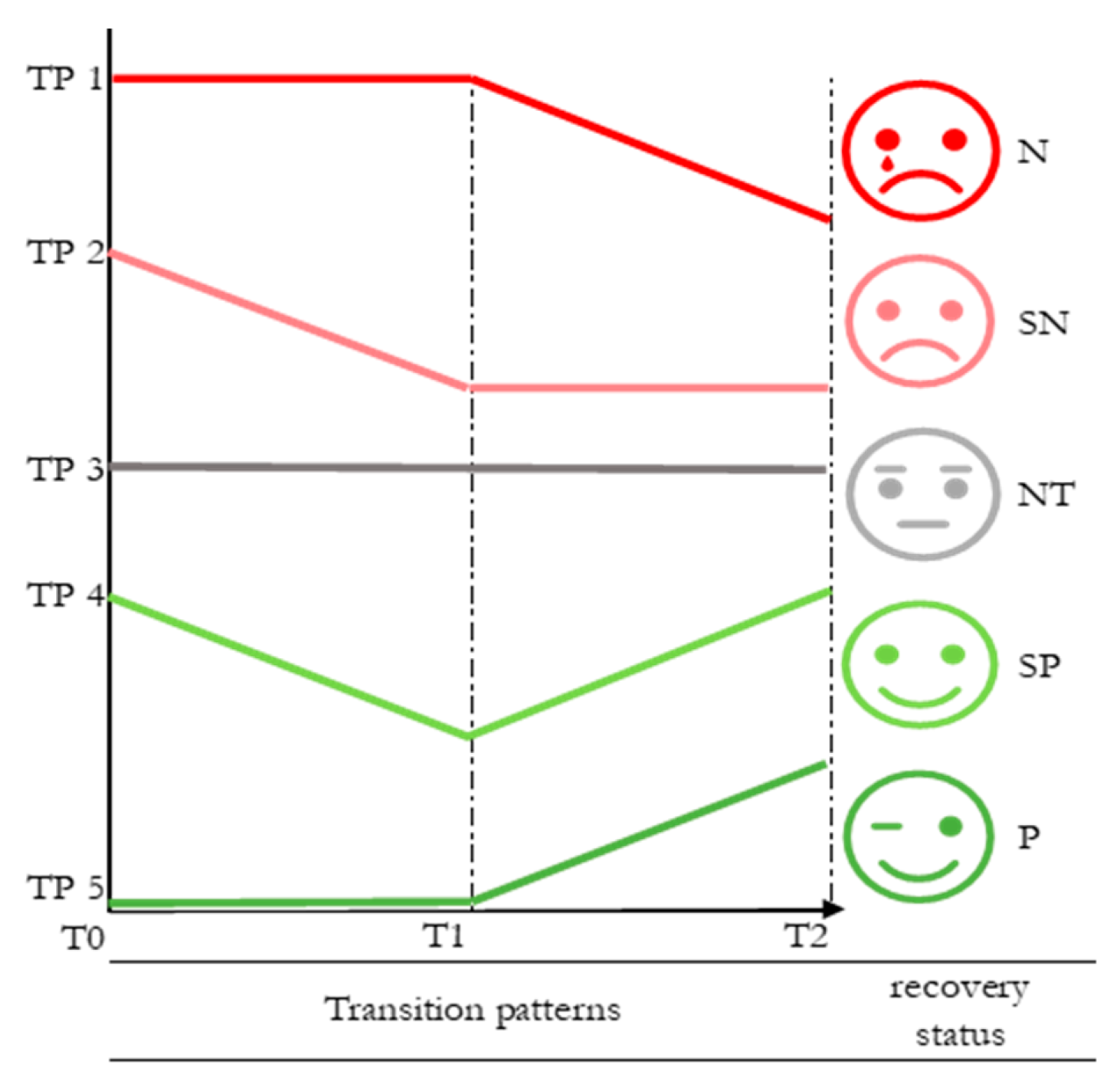
We lack standard methods for recovery assessment, where existing methods are either (i) limited to physical reconstruction detection, or (ii) qualitative/anecdotal. The contribution of the paper is to provide a conceptual framework for a rigorous LCLU-based recovery assessment. The developed CF for image-based recovery assessment introduces a nuanced definition of recovery based on TPs, which are categorized into five groups: Positive, slightly positive, neutral, slightly negative, and negative recovery. It was found that some TPs can specifically characterize short- and some long-term recovery. A general understanding of the recovery can be provided by the LC-based recovery map alone, which is cheaper and easier to produce and normally has a higher accuracy than LU information. The ML method was used (SVM) and could be simply implemented by local authorities and does not require huge computational resources (as compared to deep learning methods).The LC-based recovery map can provide planners with basic information about the ongoing recovery, and reconstruction planning could entirely consider the pre-disaster situation and deal with the dramatically changed situation after the event. However, the amount of uncertainty in the LC- based recovery map (SN, SP) requires more detailed information to be further characterized (as N or P). LU information and the LU recovery map are not necessarily effective in the early stage of the recovery process. However, target-use of LU information can significantly improve the understanding of the recovery during the medium- to the long-term. It is recommended not to generate LU information for the whole study area, but only in the area of uncertainty (which is a derivative of LC-based recovery map), since creating it is costly in terms of VHR imagery and computational resources to obtain high accuracies, specifically over large areas. In doing so, a robust recovery map can be created. However, such information cannot cover all aspects of recovery. Therefore, LCLU should be combined with other data types (e.g., ground-based data) for specific recovery aspects (e.g., social recovery) to provide a full view of the recovery process. Future work may consider a detailed definition of damage classes related to disasters in combination with finer spatial resolution imagery. Other machine learning methods (also combined with the object-based approach) would be valuable to explore. Besides, TPs should be dependently contextualized along with planning and development policy of an affected area.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}