Multi-GNSS Relative Positioning with Fixed Inter-System Ambiguity



Abstract
:1. Introduction
2. Double Difference Method
3. Un-Difference Method
3.1. Intra-system DD Ambiguity Fixing
3.2. Inter-system DD Ambiguity Fixing
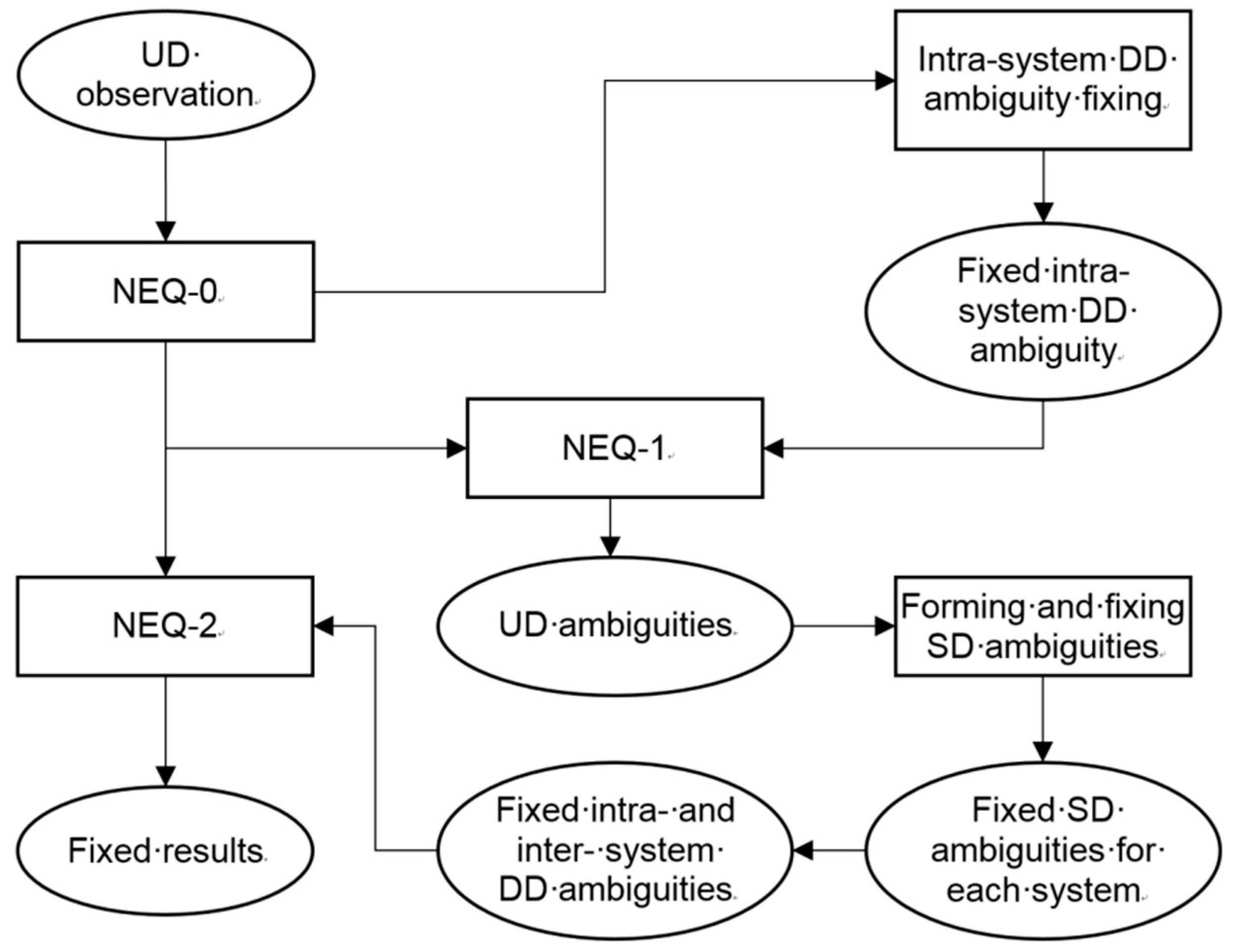
3.3. Ambiguity Fixing Flow
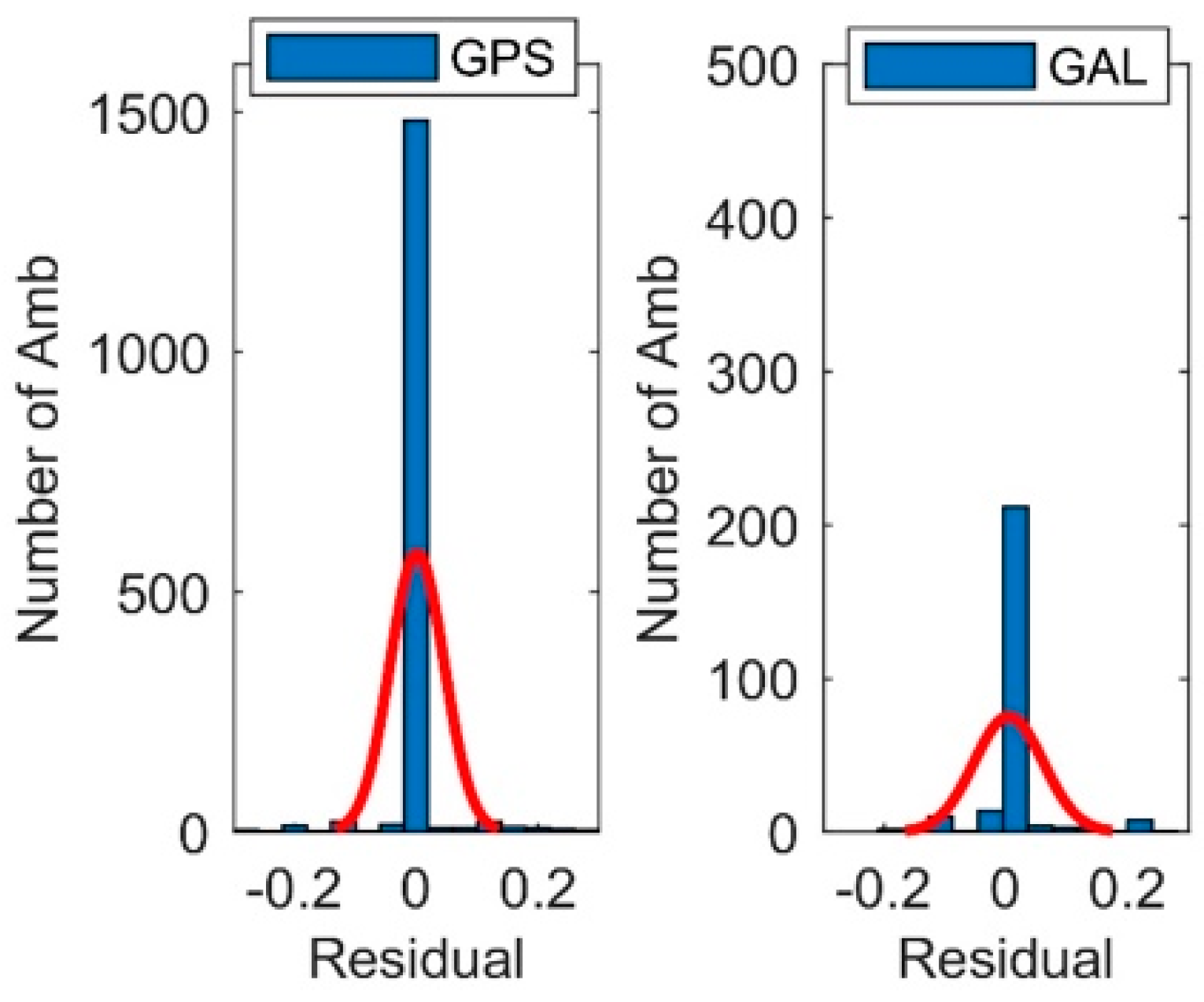
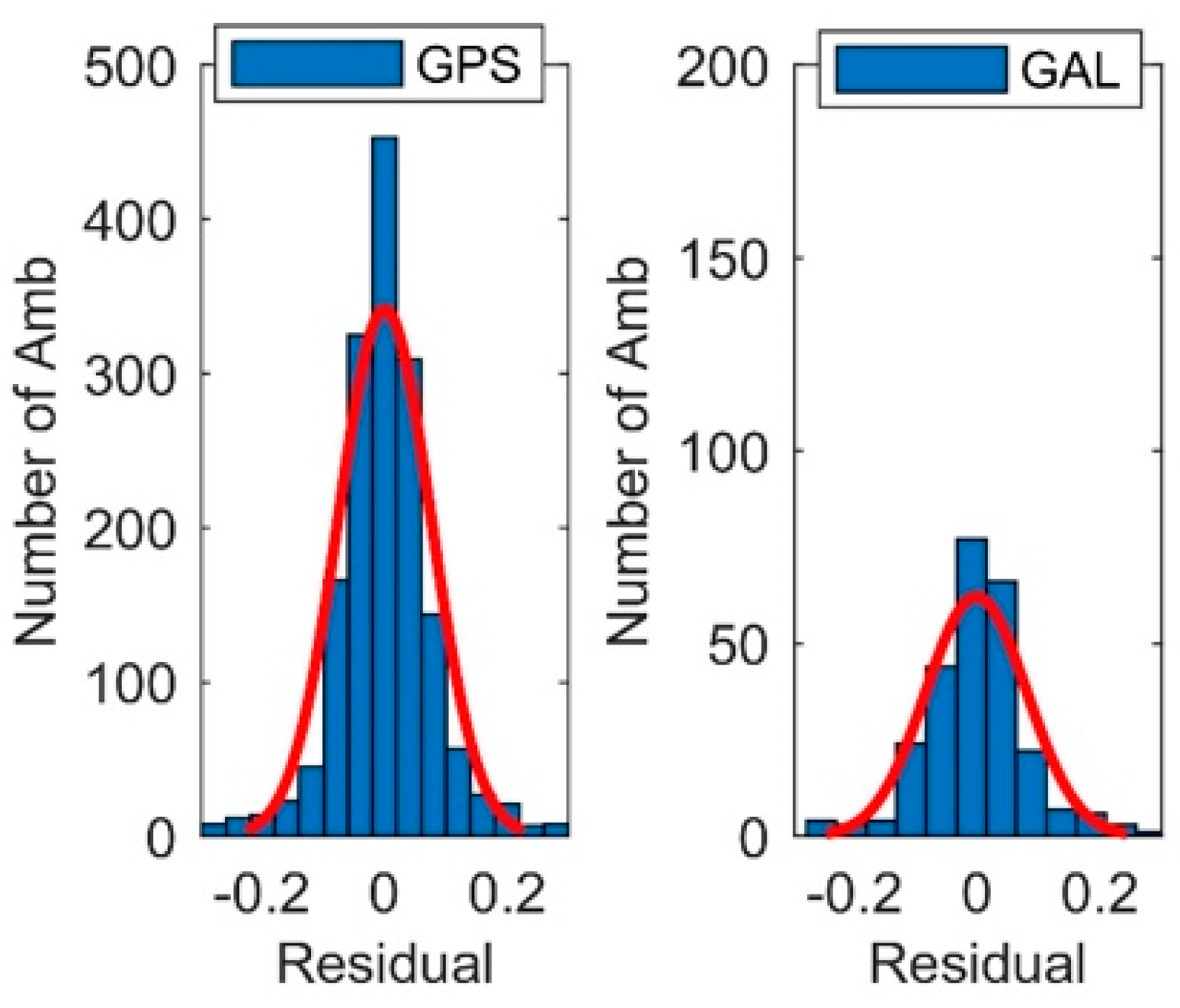
4. Consistency between RUPD and Ambiguities
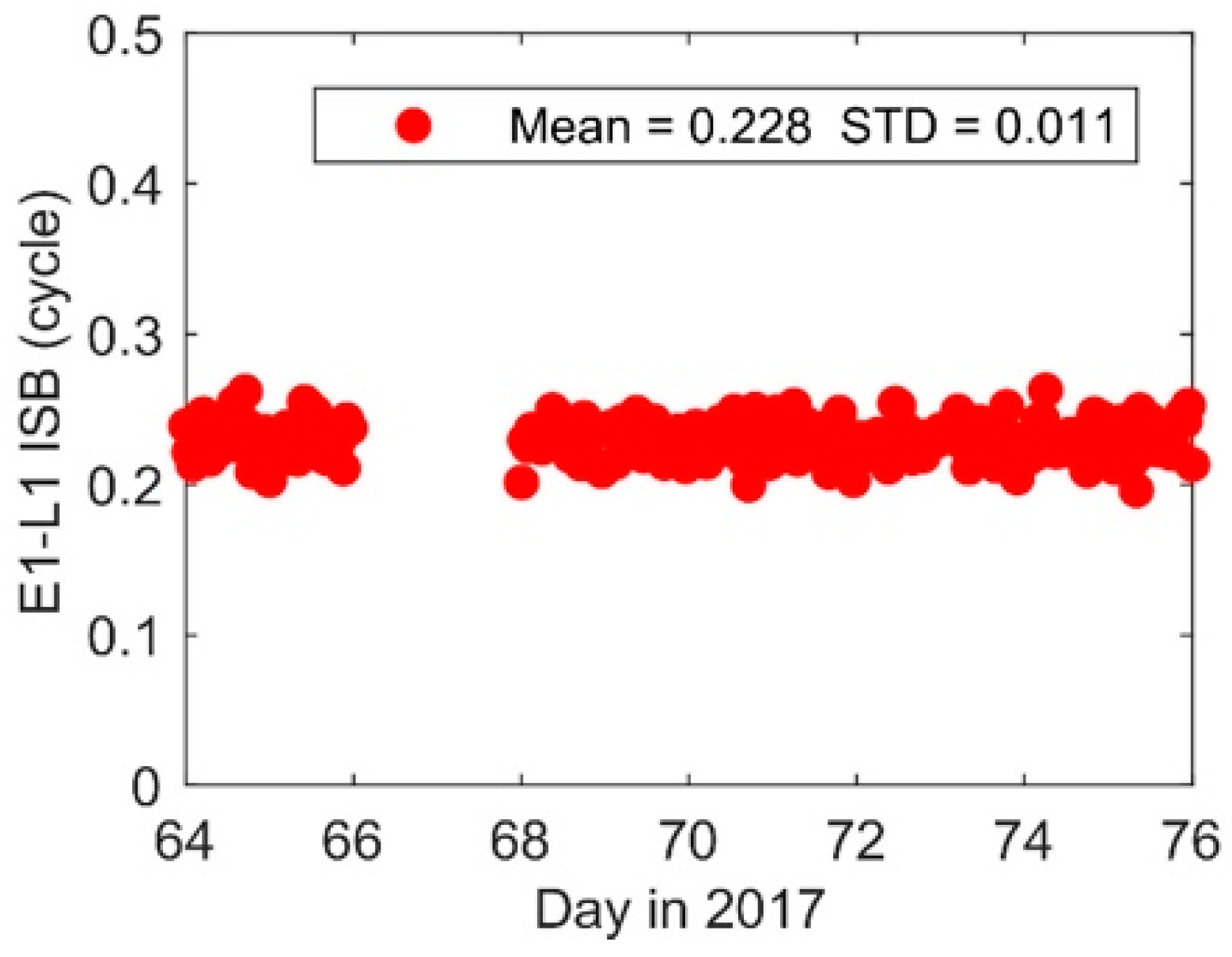
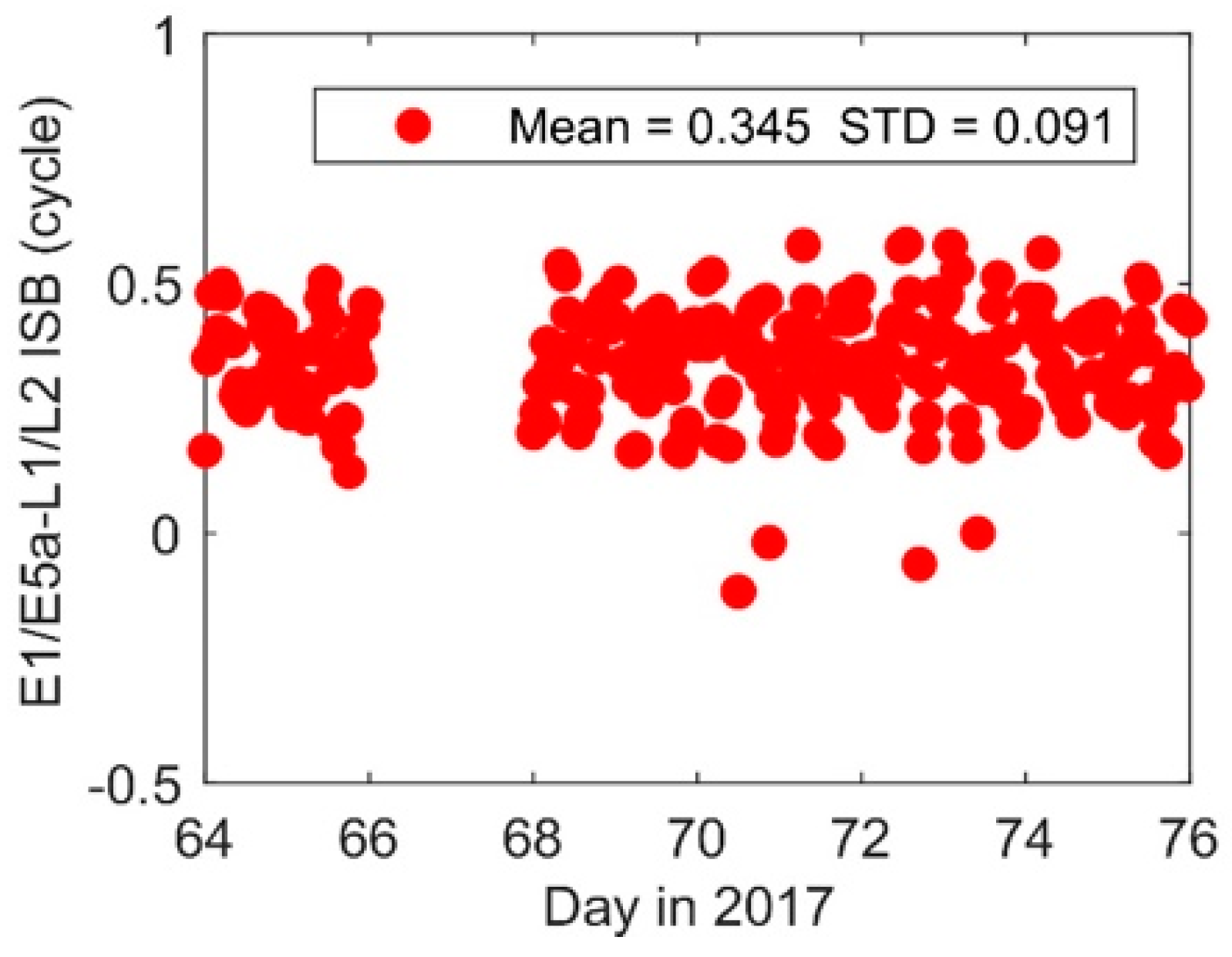
5. Inter-System Phase Bias
6. Relative Positioning Results
6.1. Experiments with Different Cut-Off Angle
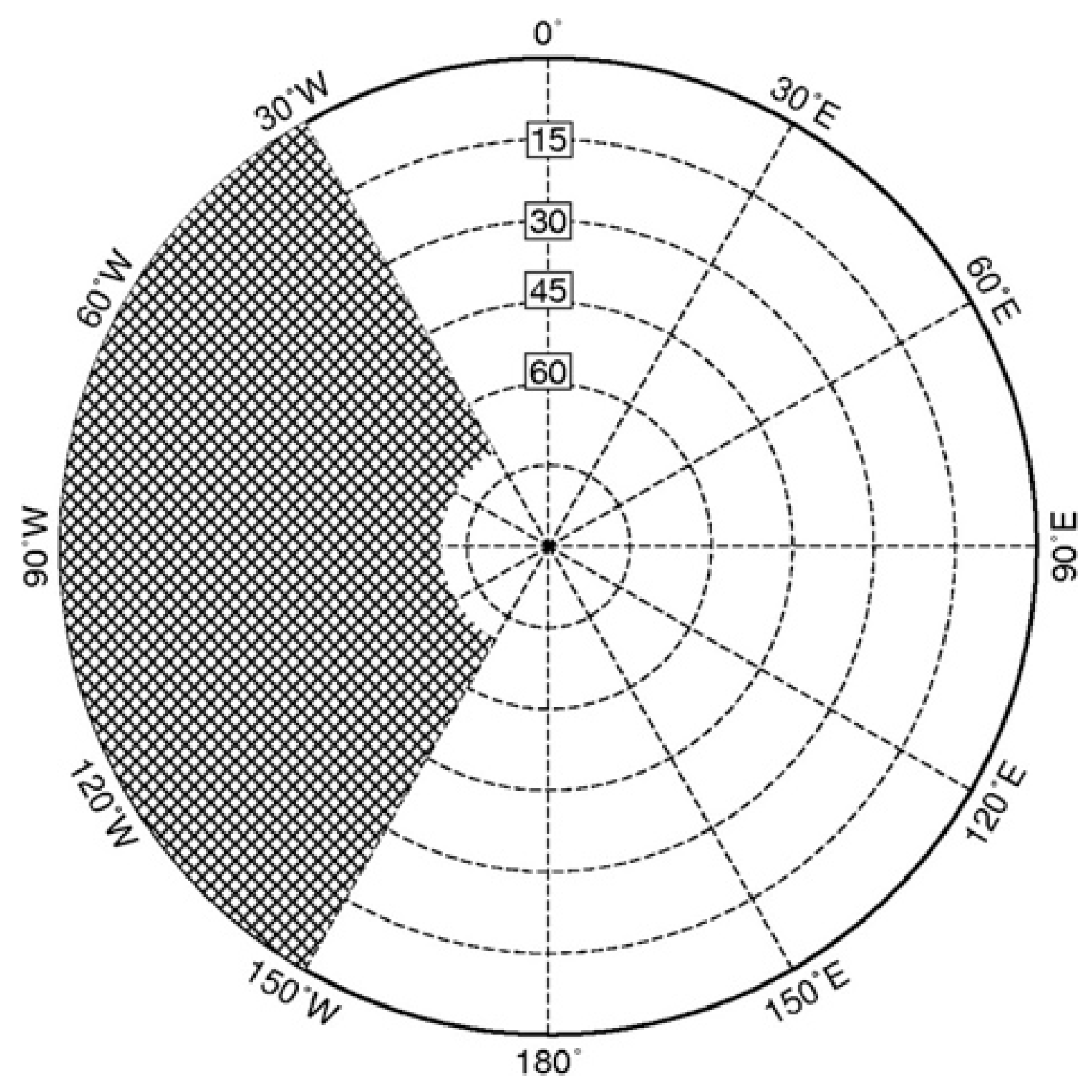
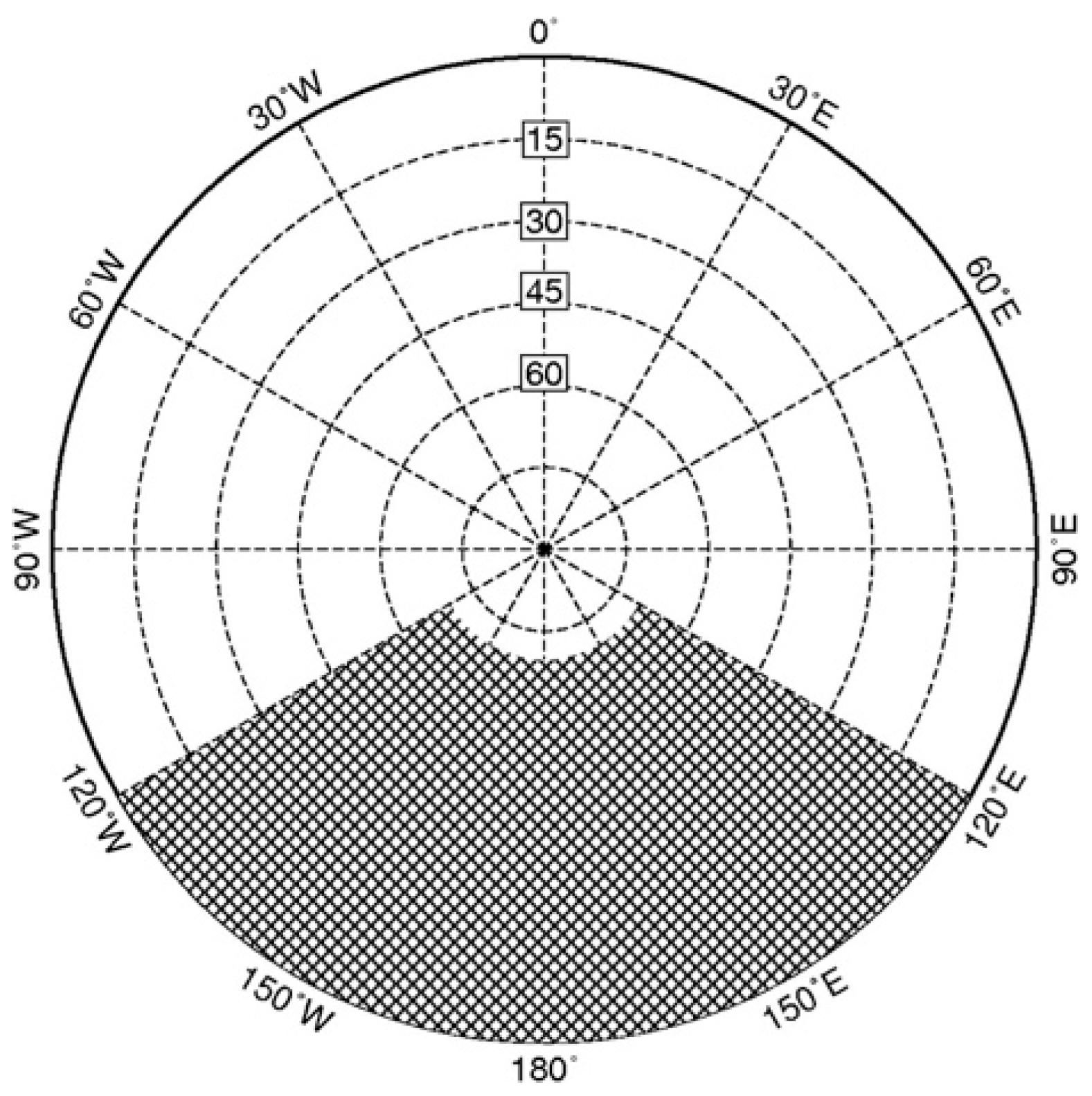
6.2. Experiments with Different Simulated Signal Obstructions
6.3. Experiments with 4 GPS and All Observed Galileo Satellites
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.P.; Liu, J.N. Study on Application of GPS in the Geheyan Dam Deformation Monitoring. Wuhan Univ. J. Nat. Sci. 1998, 23, 48–49. [Google Scholar]
- Chen, H.; Xiao, Y.; Jiang, W.; Zhou, X.; Liu, H. An improved method for multi-GNSS baseline processing using single difference. Adv. Space Res. 2019, in press. [Google Scholar] [CrossRef]
- Yang, Y.X.; Li, J.L.; Xu, J.Y.; Tang, J.; Guo, H.; He, H. Contribution of the compass satellite navigation system to global PNT users. Chin. Sci. Bull. 2011, 56, 2813–2819. [Google Scholar] [CrossRef]
- European Union. European GNSS (Galileo) Open Service Signal in Space: Interface Control Document, OS SIS ICD. 2010. Available online: https://ec.europa.eu/docsroom/documents/11870/attachments/1/translations/en/renditions/native (accessed on 14 January 2019).
- Schönemann, E.; Becker, M.; Springer, T. A new approach for GNSS analysis in a multi-GNSS and multi-signal environment. J. Geod. Sci. 2011, 1, 204–214. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef] [Green Version]
- Odolinski, R.; Teunissen, P.; Odijk, D. Combined BDS, Galileo, QZSS and GPS single-frequency RTK. GPS Solut. 2014, 19, 151–163. [Google Scholar] [CrossRef]
- Xu, G. GPS data processing with equivalent observation equations. GPS Solut. 2002, 6, 28–33. [Google Scholar] [CrossRef]
- Schaffrin, B.; Bock, Y. A unified scheme for processing GPS dual-band phase observations. Bull. Géodésique 1988, 62, 142–160. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Dick, G.; Zhang, P.F.; Rothacher, M. A new data processing strategy for huge GNSS global networks. J. Geod. 2006, 80, 199–203. [Google Scholar] [CrossRef]
- Julien, O.; Alves, P.; Cannon, E.; Zhang, W. A tightly coupled GPS/Galileo combination for improved ambiguity resolution. In Proceedings of the ENC-GNSS 2003, Graz, Austria, 22–25 April 2003. [Google Scholar]
- Odijk, D.; Teunissen, P. Characterization of between-receiver GPS-Galileo inter-system biases and their effect on mixed ambiguity resolution. GPS Solut. 2013, 17, 521–533. [Google Scholar] [CrossRef]
- Odijk, D.; Teunissen, P. Estimation of differential inter-system biases between the overlapping frequencies of GPS, Galileo, BeiDou and QZSS. In Proceedings of the 4th International Colloquium Scientific and Fundamental Aspects of the Galileo Programme 2013, Prague, Czech Republic, 4–6 December 2013. [Google Scholar]
- Odijk, D.; Teunissen, P.; Khodabandeh, A. Galileo IOV RTK positioning: Standalone and combined with GPS. Surv. Rev. 2014, 46, 267–277. [Google Scholar] [CrossRef]
- Paziewski, J.; Wielgosz, P. Accounting for Galileo-GPS inter- system biases in precise satellite positioning. J. Geod. 2015, 89, 81–93. [Google Scholar] [CrossRef]
- Gao, W.; Gao, C.; Pan, S.; Meng, X.; Xia, Y. Inter-System Differencing between GPS and BDS for Medium-Baseline RTK Positioning. Remote Sens. 2017, 9, 948. [Google Scholar] [CrossRef]
- Tian, Y.; Ge, M.; Neitzel, F.; Zhu, J. Particle filter-based estimation of inter-system phase bias for real-time integer ambiguity resolution. GPS Solut. 2016, 21, 949–961. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, Z.; Ge, M.; Neitzel, F. Determining inter-system bias of GNSS signals with narrowly spaced frequencies for GNSS positioning. J. Geod. 2018, 92, 873–887. [Google Scholar] [CrossRef]
- Khodabandeh, A.; Teunissen, P.J.G. PPP-RTK and inter-system biases: The ISB look-up table as a means to support multi-system PPP-RTK. J. Geod. 2016, 90, 837–851. [Google Scholar] [CrossRef]
- Geng, J.; Li, X.; Zhao, Q.; Li, G. Inter-system PPP ambiguity resolution between GPS and BeiDou for rapid initialization. J. Geod. 2018, 1–16. [Google Scholar] [CrossRef]
- Xiao, Y.; Jiang, W.; Chen, H.; Yuan, P.; Xi, R. Research and realization of deformation monitoring algorithm with millimeter level precision based on BeiDou Navigation Satellite System. Wuhan Univ. J. Nat. Sci. 2016, 45, 16–21. [Google Scholar]
- Salazar, D.; Hernandez-Pajares, M.; Juan, J.M.; Sanz, J. GNSS data management and processing with the GPSTk. GPS Solut. 2010, 14, 293–299. [Google Scholar] [CrossRef]
- Wang, M.; Cai, H.; Pan, Z. BDS/GPS relative positioning for long baseline with undifferenced observations. Adv. Space Res. 2015, 55, 113–124. [Google Scholar] [CrossRef]
- Liu, J.; Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar]
- Yi, W.; Song, W.; Lou, Y.; Shi, C.; Yao, Y.; Guo, H.; Chen, M.; Wu, J. Improved method to estimate undifferenced satellite fractional cycle biases using network observations to support PPP ambiguity resolution. GPS Solut. 2017, 21, 1369–1378. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Dong, D.; Bock, Y. Global positioning system network analysis with phase ambiguity resolution applied to crustal deformation studies in California. J. Geophys. Res. Solid Earth 1989, 94, 3949–3966. [Google Scholar] [CrossRef]
- Blewitt, G. Carrier phase ambiguity resolution for the global positioning system applied to geodetic baselines up to 2,000 km. J. Geophys. Res. Solid Earth 1989, 94, 10187–10203. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; et al. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)—Achievements, Prospects and Challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cutoff Angle | Intra-System DD Observations with the Fixed Intra-System Ambiguity (mm) (Strategy a) | UD Observations with the Fixed Intra- and Inter-System Ambiguity (mm) (Strategy b) | ||||
|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | |
| 7 | 7.0 | 6.0 | 8.8 | 1.9 | 2.5 | 6.4 |
| 10 | 7.0 | 5.9 | 8.5 | 2.1 | 2.6 | 6.5 |
| 20 | 8.0 | 7.0 | 8.2 | 1.9 | 2.4 | 6.7 |
| 30 | 20.9 | 14.7 | 14.4 | 2.2 | 3.0 | 8.7 |
| 40 | 315.7 | 86.8 | 94.2 | 43.0 | 21.0 | 22.8 |
| Baselines | Cutoff Angle (Degree) | Intra-System DD Observations the with Fixed Intra-System Ambiguity (mm) (Strategy a) | UD Observations with the Fixed Intra- and Inter-System Ambiguity (mm) (Strategy b) | ||||
|---|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | ||
| KIR8-KIRU | 7 | 1.9 | 1.3 | 2.3 | 1.1 | 0.8 | 2.2 |
| 10 | 1.7 | 1.2 | 2.4 | 1.1 | 0.8 | 2.3 | |
| 20 | 2.2 | 1.1 | 3.0 | 1.0 | 0.5 | 2.6 | |
| 30 | 5.6 | 1.1 | 6.0 | 0.8 | 1.3 | 4.2 | |
| 40 | 7.1 | 4.4 | 18.0 | 1.1 | 1.3 | 10.8 | |
| AGGO-LPGS | 7 | 2.1 | 6.3 | 16.7 | 2.0 | 4.0 | 12.2 |
| 10 | 2.1 | 6.2 | 16.6 | 2.3 | 4.1 | 12.2 | |
| 20 | 3.6 | 5.5 | 19.7 | 1.6 | 3.5 | 10.1 | |
| 30 | 4.9 | 5.9 | 27.2 | 2.2 | 2.9 | 22.1 | |
| 40 | 7.5 | 7.6 | 60.8 | 2.3 | 2.1 | 56.6 | |
| NNOR-PERT | 7 | 1.9 | 2.7 | 12.9 | 1.8 | 3.3 | 9.6 |
| 10 | 1.9 | 3.0 | 12.4 | 2.1 | 3.2 | 10.1 | |
| 20 | 2.9 | 3.0 | 16.8 | 2.5 | 2.3 | 17.9 | |
| 30 | 6.0 | 5.2 | 36.8 | 2.5 | 2.3 | 20.1 | |
| 40 | 7.1 | 7.4 | 78.0 | 3.7 | 3.3 | 55.5 | |
| Baselines | Intra-System DD Observations with the Fixed Intra-System Ambiguity (mm) (Strategy a) | UD Observations with the Fixed Intra- and Inter-System Ambiguity (mm) (Strategy b) | |||||
|---|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | ||
| KIRU-KIR8 | Scene 1 | 12.5 | 4.1 | 14.0 | 6.0 | 1.1 | 9.0 |
| Scene 2 | 5.9 | 9.0 | 13.6 | 2.4 | 2.3 | 5.5 | |
| AGGO-LPGS | Scene 1 | 16.1 | 7.3 | 21.6 | 2.4 | 3.3 | 11.7 |
| Scene 2 | 5.1 | 12.2 | 26.6 | 4.9 | 5.5 | 15.1 | |
| NNOR-PERT | Scene 1 | 18.9 | 6.0 | 32.4 | 5.6 | 3.5 | 23.9 |
| Scene 2 | 10.9 | 13.1 | 41.2 | 8.1 | 5.9 | 28.5 | |
| The Fixed Intra-System Ambiguity (mm) (Strategy a) | UD Observations with the Fixed Intra- and Inter-System Ambiguity (mm) (Strategy b) | |||||
|---|---|---|---|---|---|---|
| East | North | Up | East | North | Up | |
| All observed Galileo satellites, along with the 4 GPS satellites | 41.2 | 25.9 | 22.2 | 3.5 | 3.7 | 8.0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Jiang, W.; Li, J. Multi-GNSS Relative Positioning with Fixed Inter-System Ambiguity. Remote Sens. 2019, 11, 454. https://doi.org/10.3390/rs11040454
Chen H, Jiang W, Li J. Multi-GNSS Relative Positioning with Fixed Inter-System Ambiguity. Remote Sensing. 2019; 11(4):454. https://doi.org/10.3390/rs11040454
Chicago/Turabian StyleChen, Hua, Weiping Jiang, and Jiancheng Li. 2019. "Multi-GNSS Relative Positioning with Fixed Inter-System Ambiguity" Remote Sensing 11, no. 4: 454. https://doi.org/10.3390/rs11040454
APA StyleChen, H., Jiang, W., & Li, J. (2019). Multi-GNSS Relative Positioning with Fixed Inter-System Ambiguity. Remote Sensing, 11(4), 454. https://doi.org/10.3390/rs11040454