Navigation and Mapping in Forest Environment Using Sparse Point Clouds


 , ,
, ,
Abstract
:
1. Introduction
1.1. Existing Methods to Detect Tree Stems
- Robust cylinder matching to a local density concentration of a horizontally projected PC. Cylinder and circle match techniques have been presented, for example, in [10]. Included is the Hough transform, a heuristic approach composed of several steps including the spectral decomposition of local neighborhoods, a robust cylinder fit, and voxel filtering, followed by random sample consensus (RANSAC). The maximum likelihood approach of [11] also belongs to this group.The local density method was used in [12]. This method should first be adapted to mobile laser scanning tasks and is limited to relatively small ranges (approximately 10 m), due to its high point density requirements. Vertically layered computation is an interesting detail, which can be integrated into many of the other algorithms listed here, though.
- Voxel voting [13] means that a series of morphological operations on voxels reduce the canopy and strengthen the couplings between potential stem voxels. The voxel-based normalized cut of [14] could be adapted to tree stem detection in the case of a low-density TLS. The method presented in [10] also belongs to this category.
- The local filtering of points is based on a geometric feature or a group of them, before progressing to, for example, cylinder matching (see case 1) or line segment matching (case 4). The stem center line segment starts from the approximated ground level and proceeds to the highest hit point of the stem. Such a stem line segment is typically at the minimum square error position related to the points. Local filtering may include a clustering phase, such as a connected component segmentation algorithm [15], which uses local geometric features like curvature. The approach of [15] detected stems well, but was rather inaccurate in DBH measurement and may not be suitable for on-board and online tree map computation.
- Matching a line segment to individual tree stems. This can be, for example, a result of local principal orientations [16] after the final PC has been constructed by the SLAM process or producing a sparse SLAM problem in a preliminary phase.
- Using 3D convolutional neural networks (CNN) detecting tree stems. This approach is often limited either to airborne laser scan (ALS) cases, or to highly dense TLS. Most object registration methods are subjected to the use of sparse PC voxelization as an initial step. A rather simple case of rubber tree stem detection [17] required approximately 800 manually labeled samples. This approach seems conceivable in boreal forests; however, the global diversity of commercially significant forest environments makes training data accumulation a major effort. This suggests a need for versatile methods with auto-calibration properties.
1.2. Existing Real-Time SLAM Methods
1.3. Proposed Approach
2. Materials and Methods
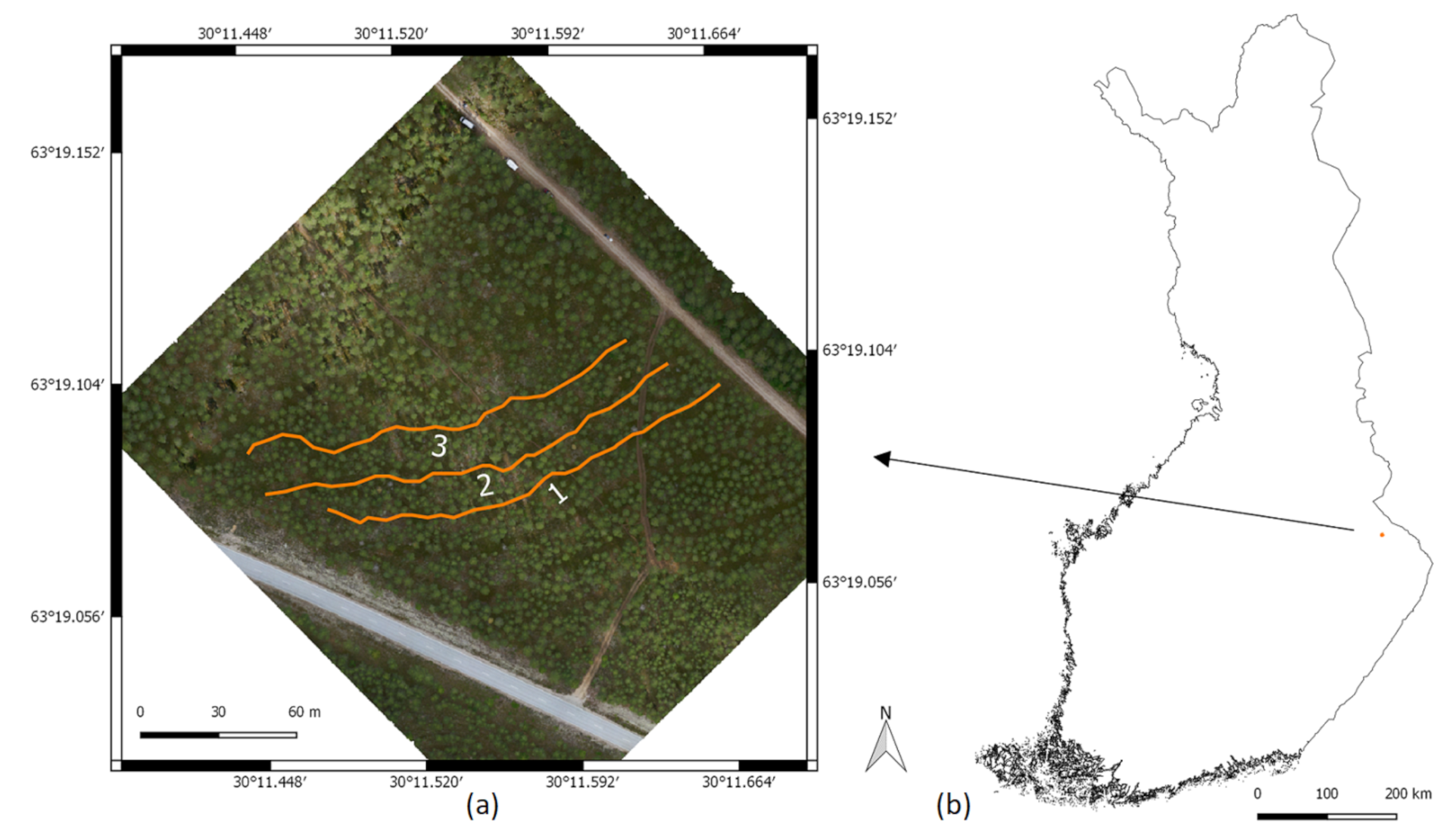
2.1. Site
2.2. Data from Various Devices
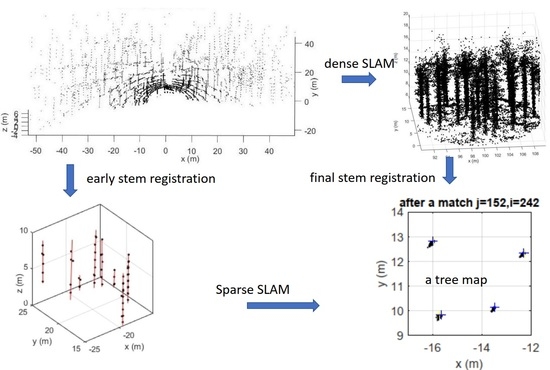
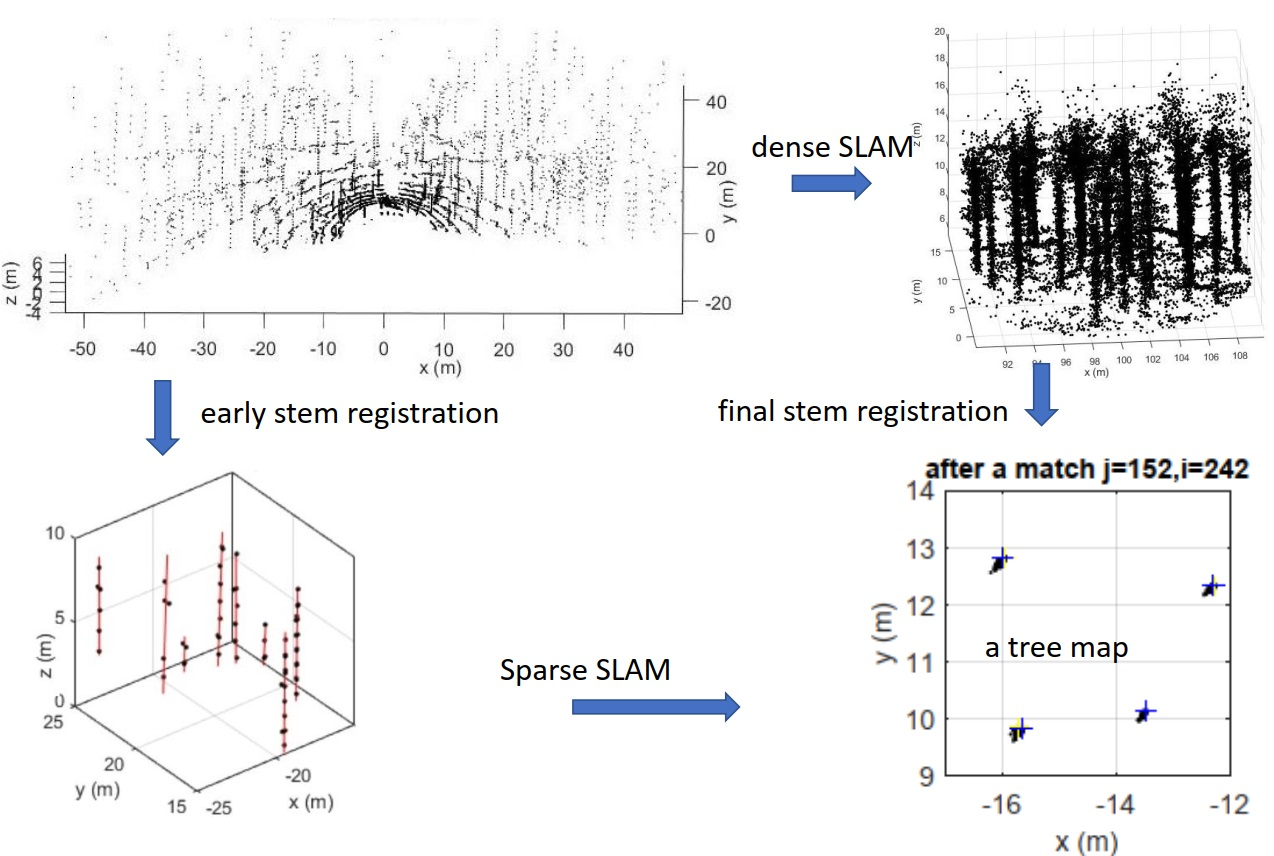
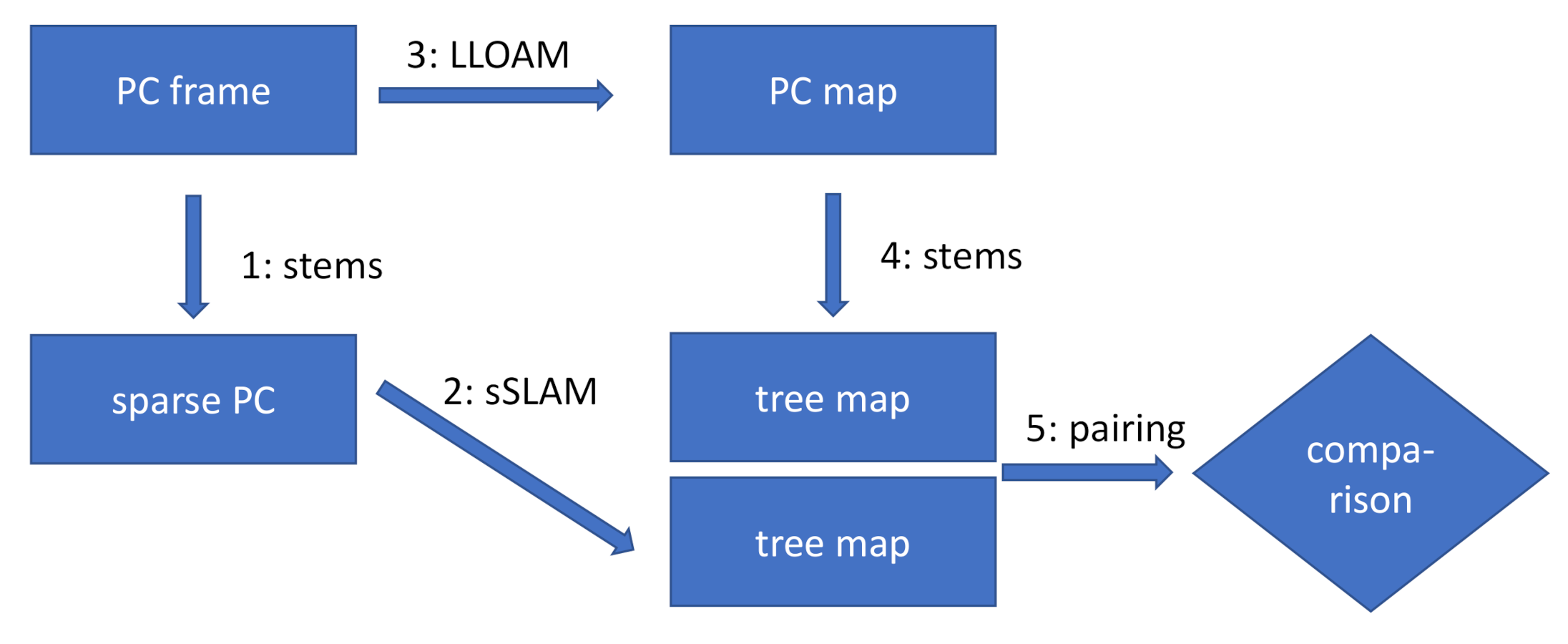
2.3. Methodology
- Tree stem detection from frames.
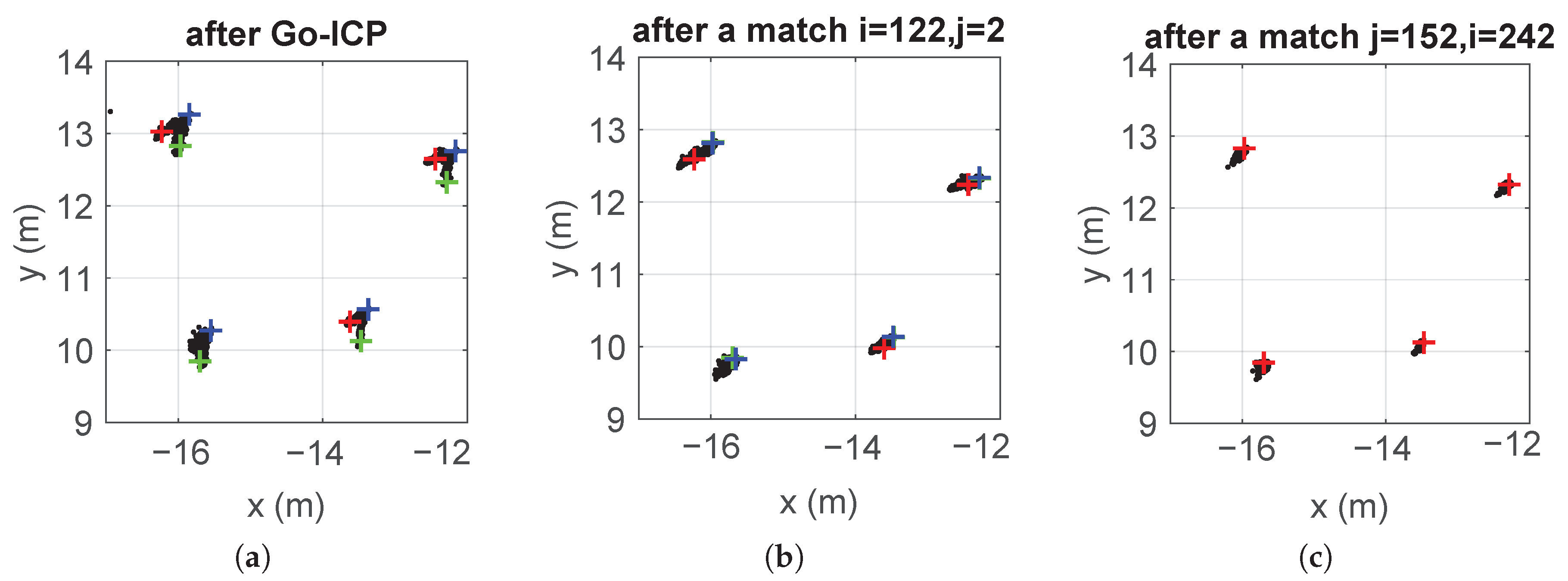
- Sparse SLAM process based on Step 1 and implemented by Go-ICP. [25]. This approach is named sSLAM in the text.
- Conventional dense SLAM by LLOAM, based on Step 1.
- Tree stem detection based on Step 3.
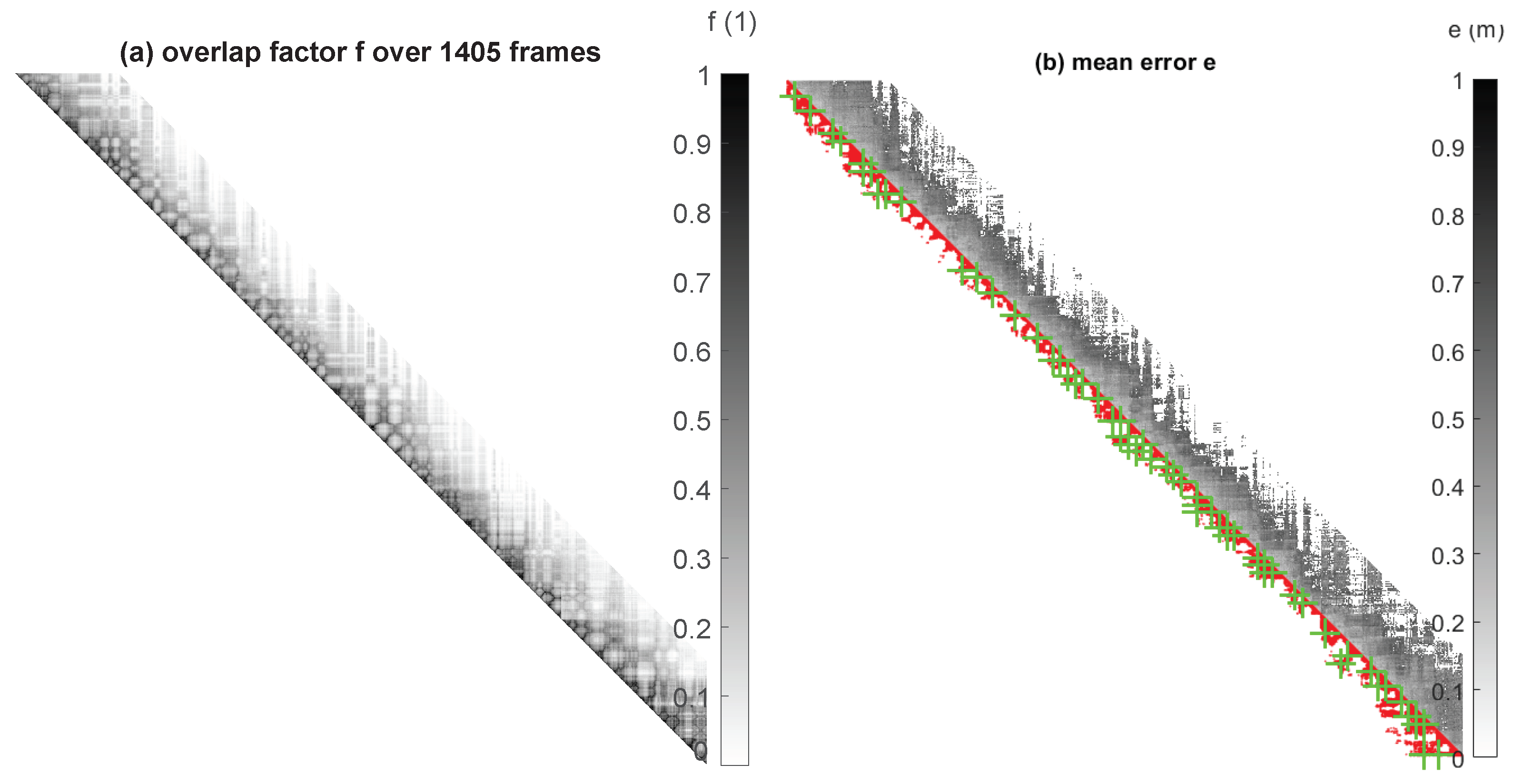
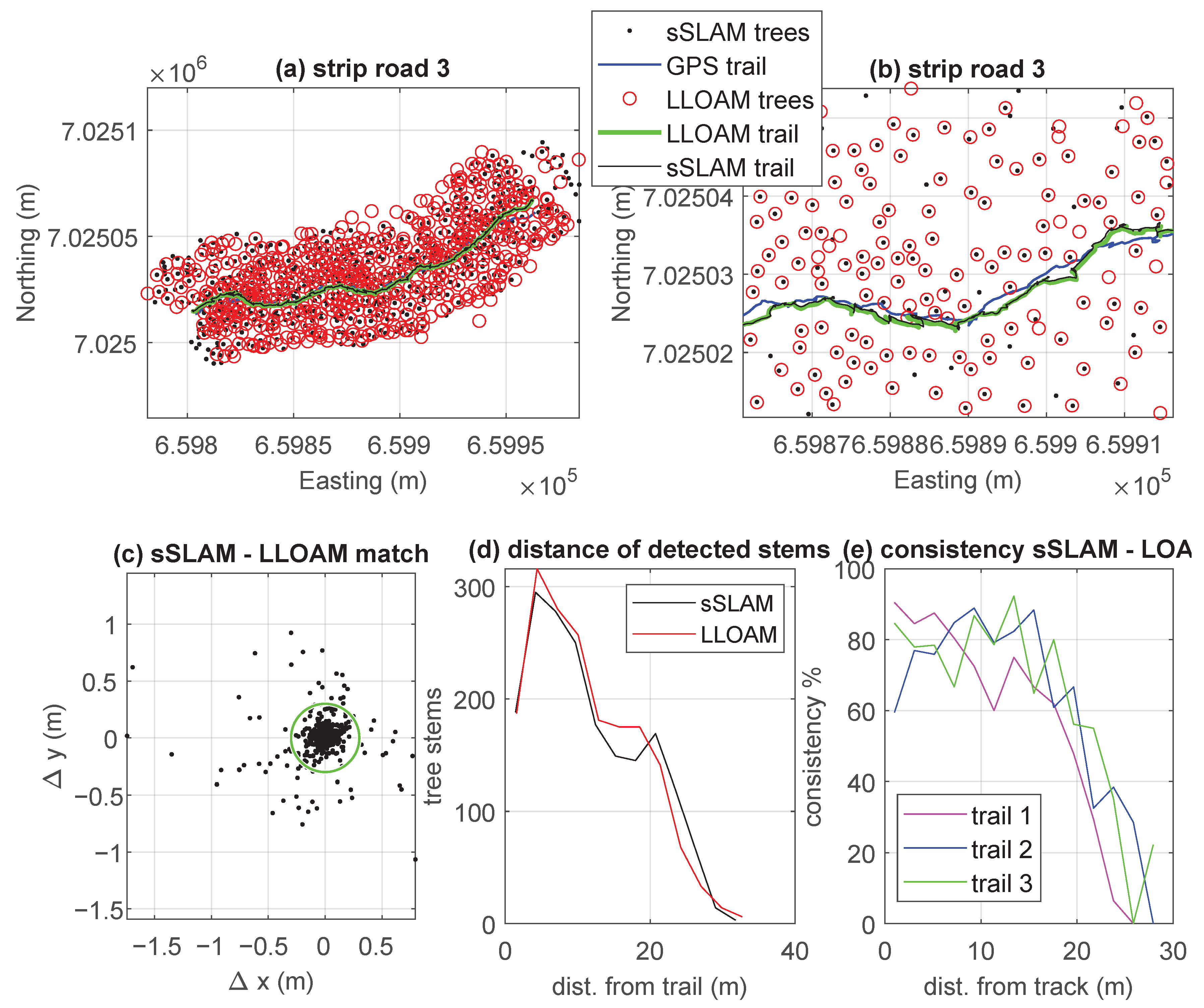
- Comparison of the results by pairing the sSLAM and LLOAM tree maps.
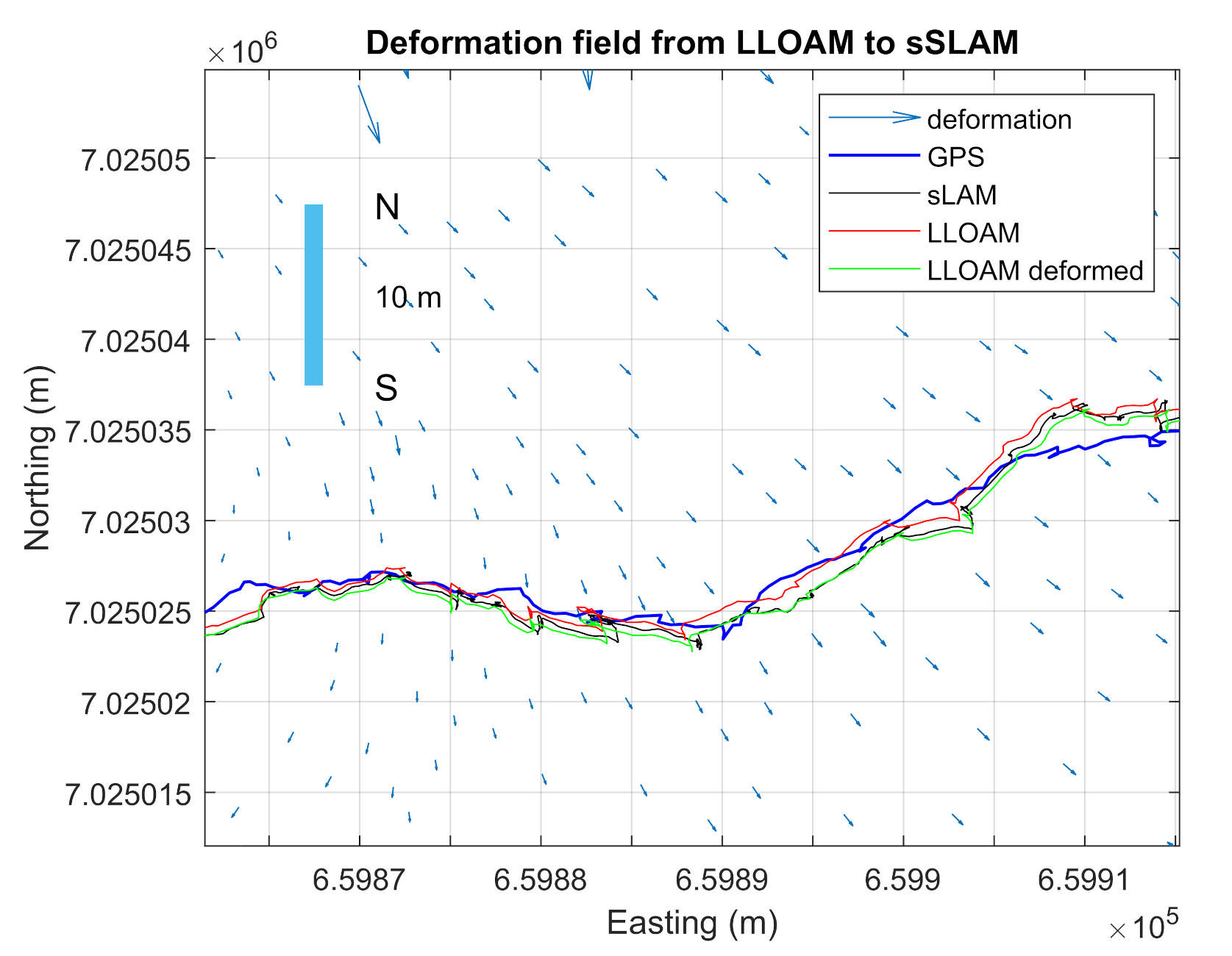
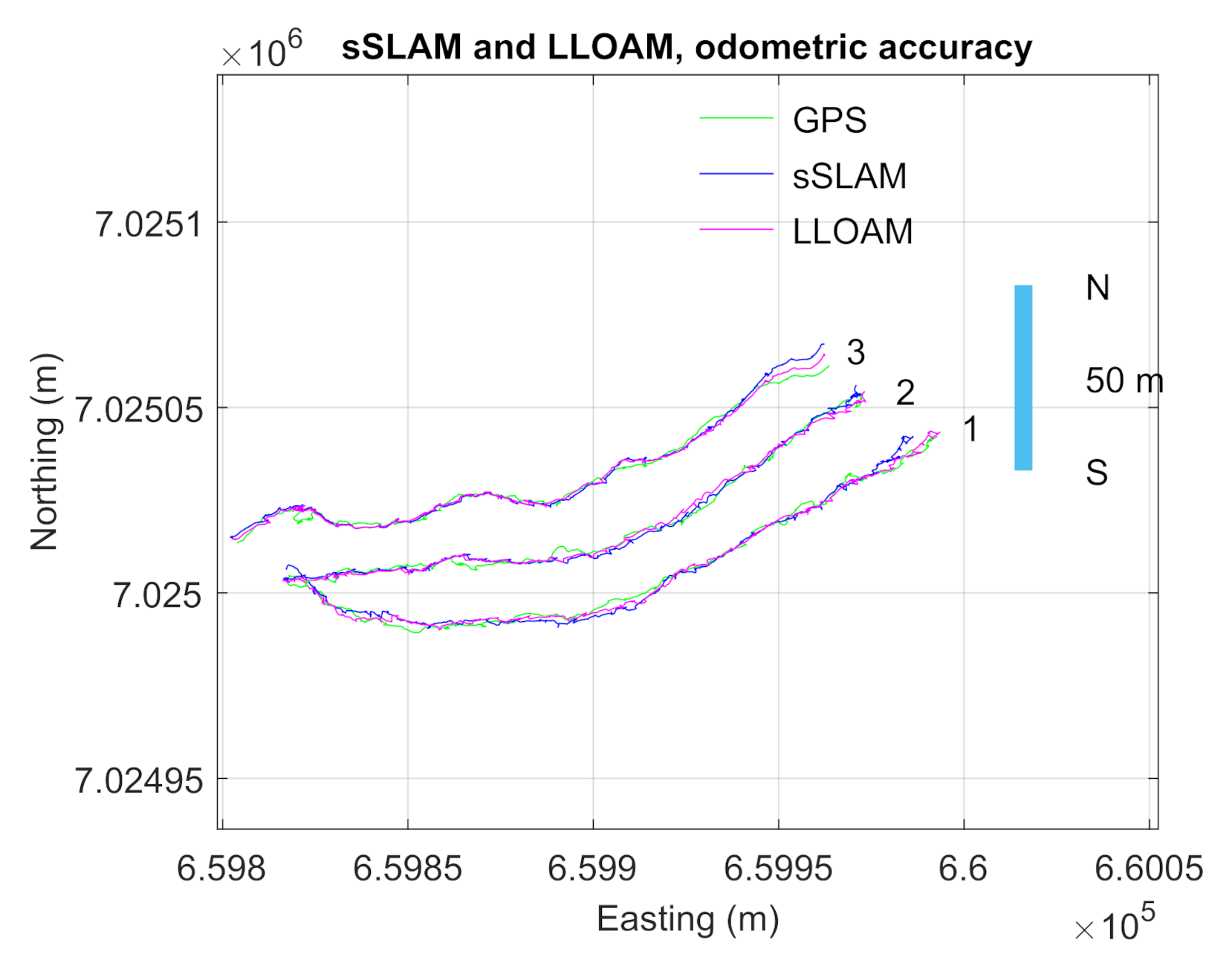
- Matching the odometry path to the GNSS path.
- Operation on a single frame input with relatively few hits per tree stem and on the final PC map with a dense points.
- Self-calibration capability, in order to avoid parameter tuning requiring a detailed stem map with tree positions and diameters.
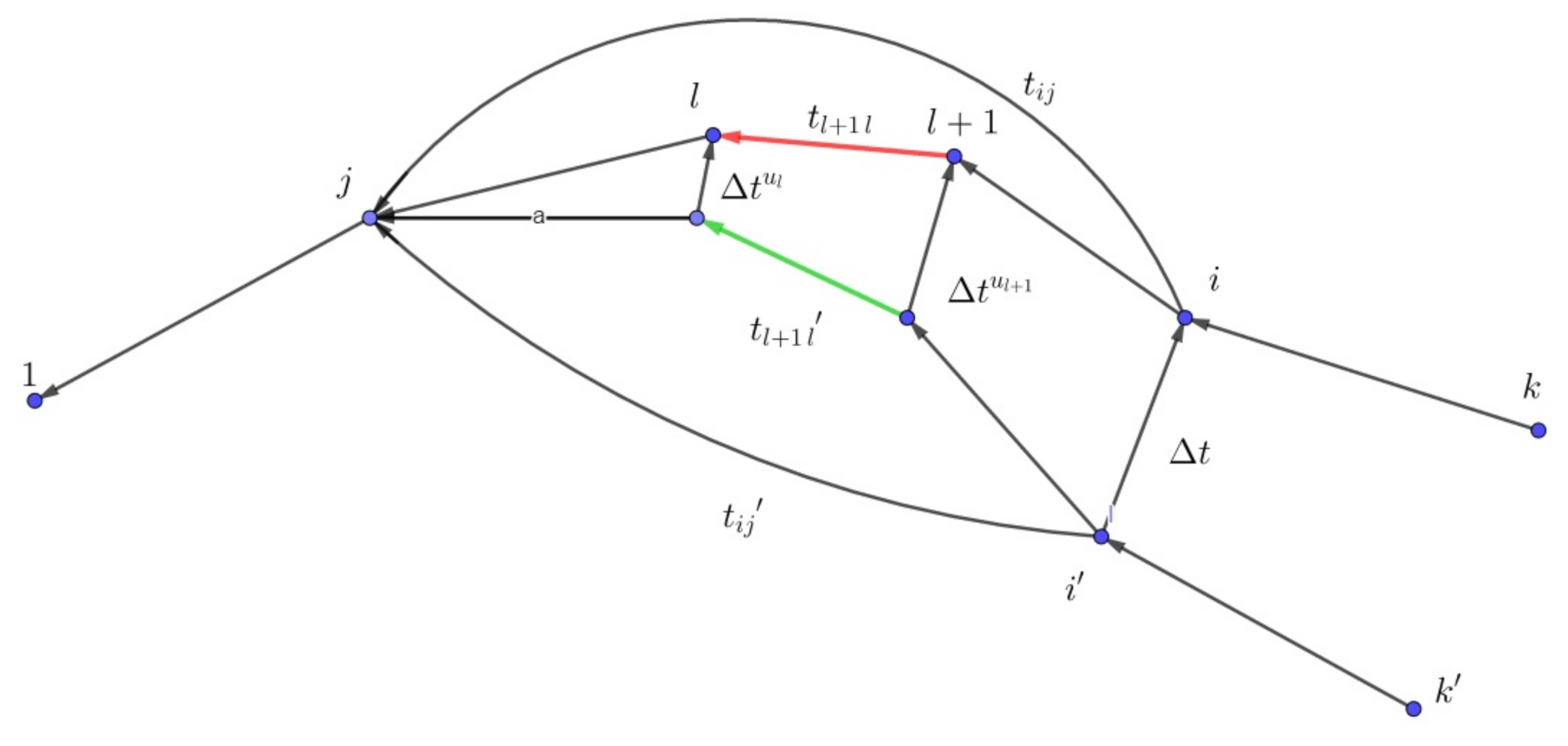
2.4. Smooth Deformation for Consistency Checks
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Benjamin, J.G.; Seymour, R.S.; Meacham, E.; Wilson, J. Impact of Whole-Tree and Cut-to-Length Harvesting on Postharvest Condition and Logging Costs for Early Commercial Thinning in Maine. North. J. Appl. For. 2013, 30, 149–155. Available online: http://xxx.lanl.gov/abs/https://academic.oup.com/njaf/article-pdf/30/4/149/23416324/2384.pdf (accessed on 25 November 2020). [CrossRef]
- Szewczyk, G.; Spinelli, R.; Magagnotti, N.; Tylek, P.; Sowa, J.M.; Rudy, P.; Gaj-Gielarowiec, D. The mental workload of harvester operators working in steep terrain conditions. Silva Fenn 2020, 54, 10355. [Google Scholar] [CrossRef]
- Li, Q.; Nevalainen, P.; Peña Queralta, J.; Heikkonen, J.; Westerlund, T. Localization in Unstructured Environments: Towards Autonomous Robots in Forests with Delaunay Triangulation. arXiv, 2020; arXiv:2005.05662. [Google Scholar]
- Pierzchała, M.; Giguére, P.; Astrup, R. Mapping forests using an unmanned ground vehicle with 3D LiDAR and graph-SLAM. Comput. Electron. Agric. 2018, 145, 217–225. [Google Scholar] [CrossRef]
- Nevalainen, O.; Honkavaara, E.; Tuominen, S.; Viljanen, N.; Hakala, T.; Yu, X.; Hyyppä, J.; Saari, H.; Pölönen, I.; Imai, N.; et al. Individual Tree Detection and Classification with UAV-Based Photogrammetric Point Clouds and Hyperspectral Imaging. Remote Sens. 2017, 9, 185. [Google Scholar] [CrossRef] [Green Version]
- Zhao, G.; Shao, G.; Reynolds, K.; Wimberly, M.; Warner, T.; Moser, J.; Rennolls, K.; Magnussen, S.; Köhl, M.; Anderson, H.E.; et al. Digital Forestry: A White Paper. J. For. 2005, 103, 47–50. [Google Scholar]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age. Trans. Rob. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Sprickerhof, J.; Nuchter, A.; Lingemann, K.; Hertzberg, J. An explicit loop closing technique for 6d SLAM. In Proceedings of the 4th European Conference on Mobile Robots, ECMR-09, Mlini/Dubrovnik, Croatia, 23–25 September 2009; pp. 229–234. [Google Scholar]
- de Conto, T. Performance of tree stem isolation algorithms for terrestrial laser scanning point clouds. In Examensarbete / SLU; Institutionen För Sydsvensk Skogsvetenskap: Alnarp, Sweden, 2016; Volume 262. [Google Scholar]
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM aided Stem Mapping for Forest Inventory with Small-footprint Mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef] [Green Version]
- Hosoi, F.; Nakai, Y.; Omasa, K. Voxel tree modeling for estimating leaf area density and woody material volume using 3-D LIDAR data. Isprs Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2013, II-5/W2, 115–120. [Google Scholar] [CrossRef] [Green Version]
- Heinzel, J.; Huber, M.O. Detecting Tree Stems from Volumetric TLS Data in Forest Environments with Rich Understory. Remote Sens. 2017, 9, 9. [Google Scholar] [CrossRef] [Green Version]
- Guan, H.; Yu, Y.; Yan, W.; Li, D.; Li, J. 3D-Cnn Based Tree species classification using mobile lidar data. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 989–993. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Wan, P.; Wang, T.; Cai, S.; Chen, Y.; Jin, X.; Yan, G. A Novel Approach for the Detection of Standing Tree Stems from Plot-Level Terrestrial Laser Scanning Data. Remote Sens. 2019, 11, 211. [Google Scholar] [CrossRef] [Green Version]
- Arachchige, N.H. Automatic tree stem detection of a geometric feature based approach for MLS point clouds. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2013, II-5/W2, 109–114. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, X.; Cao, L.; An, F.; Chen, B.; Xue, L.; Yun, T. Individual Rubber Tree Segmentation Based on Ground-Based LiDAR Data and Faster R-CNN of Deep Learning. Forests 2019, 10, 793. [Google Scholar] [CrossRef] [Green Version]
- Miettinen, M.; Öhman, M.; Visala, A.; Forsman, P. Simultaneous localization and mapping for forest harvesters. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 517–522. [Google Scholar]
- Zhang, J.; Singh, S. LOAM: Lidar Odometry and Mapping in Real-time. In Proceedings of the 2014 Robotics: Science and Systems Conference, Berkeley, CA, USA, 13–15 July 2014. [Google Scholar]
- Chen, S.; Nardari, G.; Lee, E.; Qu, C.; Liu, X.; Romero, R.; Kumar, V. SLOAM: Semantic Lidar Odometry and Mapping for Forest Inventory. IEEE Robot. Autom. Lett. 2020, 5. [Google Scholar] [CrossRef] [Green Version]
- Segal, A.; Hähnel, D.; Thrun, S. Generalized-ICP. In Robotics: Science and Systems; Trinkle, J., Matsuoka, Y., Castellanos, J.A., Eds.; The MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011. [Google Scholar]
- Wen, S.; Zhao, Y.; Yuan, X.; Wang, Z.; Zhang, D.; Manfredi, L. Path planning for active SLAM based on deep reinforcement learning under unknown environments. Intell. Serv. Robot. 2020, 13, 263–272. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B. LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4758–4765. [Google Scholar] [CrossRef]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 2241–2254. [Google Scholar] [CrossRef] [Green Version]
- Bello, S.A.; Yu, S.; Wang, C. Review: Deep learning on 3D point clouds. arXiv 2020, arXiv:cs.CV/2001.06280. [Google Scholar] [CrossRef]
- Li, Q.; Chen, S.; Wang, C.; Li, X.; Wen, C.; Cheng, M.; Li, J. LO-Net: Deep Real-Time Lidar Odometry. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–21 June 2019; pp. 8465–8474. [Google Scholar]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. Theme issue ‘State-of-the-art in photogrammetry, remote sensing and spatial information science’. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Oksanen, J.; Sarjakoski, T. Error Propagation of DEM-Based Surface Derivatives. Comput. Geosci. 2005, 31, 1015–1027. [Google Scholar] [CrossRef]
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning, and Control, 1st ed.; Cambridge University Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Eberly, D. Interpolation of Rigid Motions in 3D. 2017. Available online: https://www.geometrictools.com/Documentation/InterpolationRigidMotions.pdf (accessed on 21 October 2020).
- Chetverikov, D.; Svirko, D.; Stepanov, D.; Krsek, P. The Trimmed Iterative Closest Point algorithm. In Proceedings of the Object Recognition Supported by User Interaction for Service Robots, Quebec City, QC, Canada, 11–15 August 2002; Volume 3, pp. 545–548. [Google Scholar] [CrossRef]
- Akkiraju, N.; Edelsbrunner, H.; Facello, M.; Fu, P.; Mücke, E.P.; Varela, C. Alpha shapes: Definition and software. In Proceedings of the 1st International Computational Geometry Software Workshop (GCG), Minneapolis, MN, USA, 11 September 1995. [Google Scholar]
- The Mathworks, Inc. MATLAB Version 9.8.0.1323502 (R2020a); The Mathworks, Inc.: Natick, MA, USA, 2020. [Google Scholar]
- Pırtı, A. Accuracy Analysis of GPS Positioning Near the Forest Environment. Croat. J. For. Eng. 2008, 29, 189–199. [Google Scholar]
- Stankovic, L.; Dakovic, M.; Sejdic, E. Introduction to Graph Signal Processing. In Vertex-Frequency Analysis of Graph Signals; Stanković, J., Sejdić, E., Eds.; Springer: Cham, Switzerland, 2019; pp. 3–108. [Google Scholar] [CrossRef]
- Nock, R.; Sebban, M.; Jappy, P. A Symmetric Nearest Neighbor Learning Rule. In Advances in Case-Based Reasoning; Blanzieri, E., Portinale, L., Eds.; Springer: Berlin/Heidelberg, Germany, 2000; pp. 222–233. [Google Scholar]
- Sihvo, S.; Virjonen, P.; Nevalainen, P.; Heikkonen, J. Tree detection around forest harvester based on onboard LiDAR measurements. In Proceedings of the 2018 Baltic Geodetic Congress (BGC Geomatics), Olsztyn, Poland, 21–23 June 2018. [Google Scholar] [CrossRef]
- Hillemann, M.; Weinmann, M.; Mueller, M.S.; Jutzi, B. Automatic Extrinsic Self-Calibration of Mobile Mapping Systems Based on Geometric 3D Features. Remote Sens. 2019, 11, 1955. [Google Scholar] [CrossRef] [Green Version]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. arXiv 2016, arXiv:1612.00593. [Google Scholar]
- Zaganidis, A.; Sun, K.; Duckett, T.; Cielniak, G. Integrating Deep Semantic Segmentation Into 3-D Point Cloud Registration. IEEE Robot. Autom. Lett. 2018. [Google Scholar] [CrossRef] [Green Version]
- Funatomi, T.; Iiyama, M.; Kakusho, K.; Minoh, M. Regression of 3D rigid transformations on real-valued vectors in closed form. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 30 May–5 June 2017; pp. 6412–6419. [Google Scholar] [CrossRef]
- Lang, M.; Dunkley, O.; Hirche, S. Gaussian process kernels for rotations and 6D rigid body motions. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5165–5170. [Google Scholar] [CrossRef] [Green Version]
- Saukkola, A.; Melkas, T.; Riekki, K.; Sirparanta, S.; Peuhkurinen, J.; Holopainen, M.; Hyyppä, J.; Vastaranta, M. Predicting Forest Inventory Attributes Using Airborne Laser Scanning, Aerial Imagery, and Harvester Data. Remote Sens. 2019, 11, 797. [Google Scholar] [CrossRef] [Green Version]
- Lindroos, O.; Ringdahl, O.; La Hera, P.X.; Hohnloser, P.; Hellström, T. Estimating the Position of the Harvester Head–a Key Step towards the Precision Forestry of the Future? Croat. J. For. Eng. 2015, 36, 147–164. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement | sSLAM | LLOAM |
|---|---|---|
| PC size after stem detection | 450 | 63,000 |
| GNSS parallel error (m) | 0.41 | 0.84 |
| Vertical accuracy (m) | 0.94 | 0.37 |
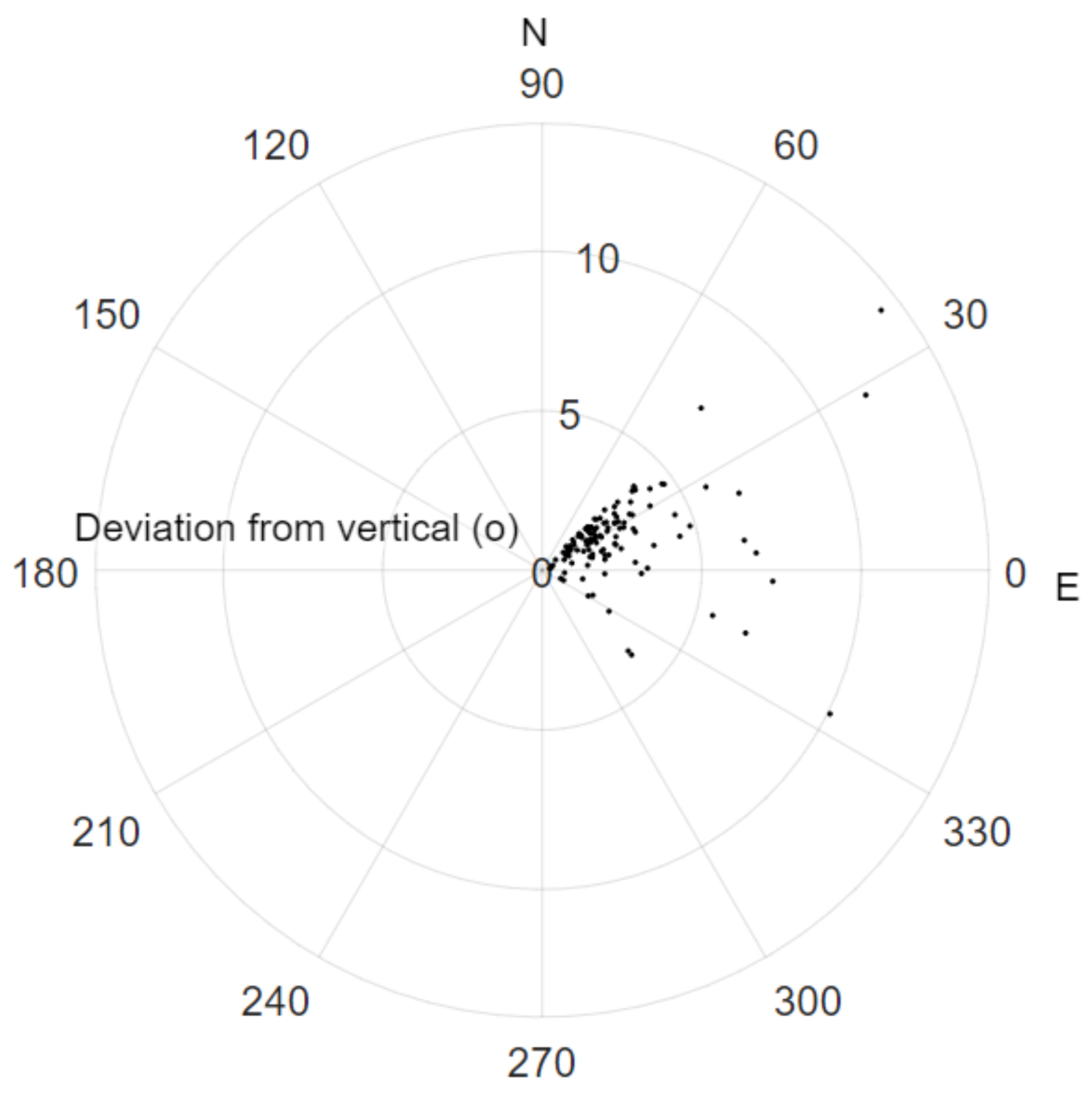
| Vertical angular noise () | 2.0 | – |
| Mapping range (m) | 20 | 20 |
| Self-consistency (%) | 79 | 75 |
| Self-consistency in parts (%) | 85 | 77 |
Sample Availability: The data presented in this study are openly available in Harvard Dataverse at 10.7910/DVN/IO7PZO. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nevalainen, P.; Li, Q.; Melkas, T.; Riekki, K.; Westerlund, T.; Heikkonen, J. Navigation and Mapping in Forest Environment Using Sparse Point Clouds. Remote Sens. 2020, 12, 4088. https://doi.org/10.3390/rs12244088
Nevalainen P, Li Q, Melkas T, Riekki K, Westerlund T, Heikkonen J. Navigation and Mapping in Forest Environment Using Sparse Point Clouds. Remote Sensing. 2020; 12(24):4088. https://doi.org/10.3390/rs12244088
Chicago/Turabian StyleNevalainen, Paavo, Qingqing Li, Timo Melkas, Kirsi Riekki, Tomi Westerlund, and Jukka Heikkonen. 2020. "Navigation and Mapping in Forest Environment Using Sparse Point Clouds" Remote Sensing 12, no. 24: 4088. https://doi.org/10.3390/rs12244088
APA StyleNevalainen, P., Li, Q., Melkas, T., Riekki, K., Westerlund, T., & Heikkonen, J. (2020). Navigation and Mapping in Forest Environment Using Sparse Point Clouds. Remote Sensing, 12(24), 4088. https://doi.org/10.3390/rs12244088