
A Burned Area Mapping Algorithm for Sentinel-2 Data Based on Approximate Reasoning and Region Growing

 ,
,  , , ,
, , ,  and
and
Abstract
:1. Introduction
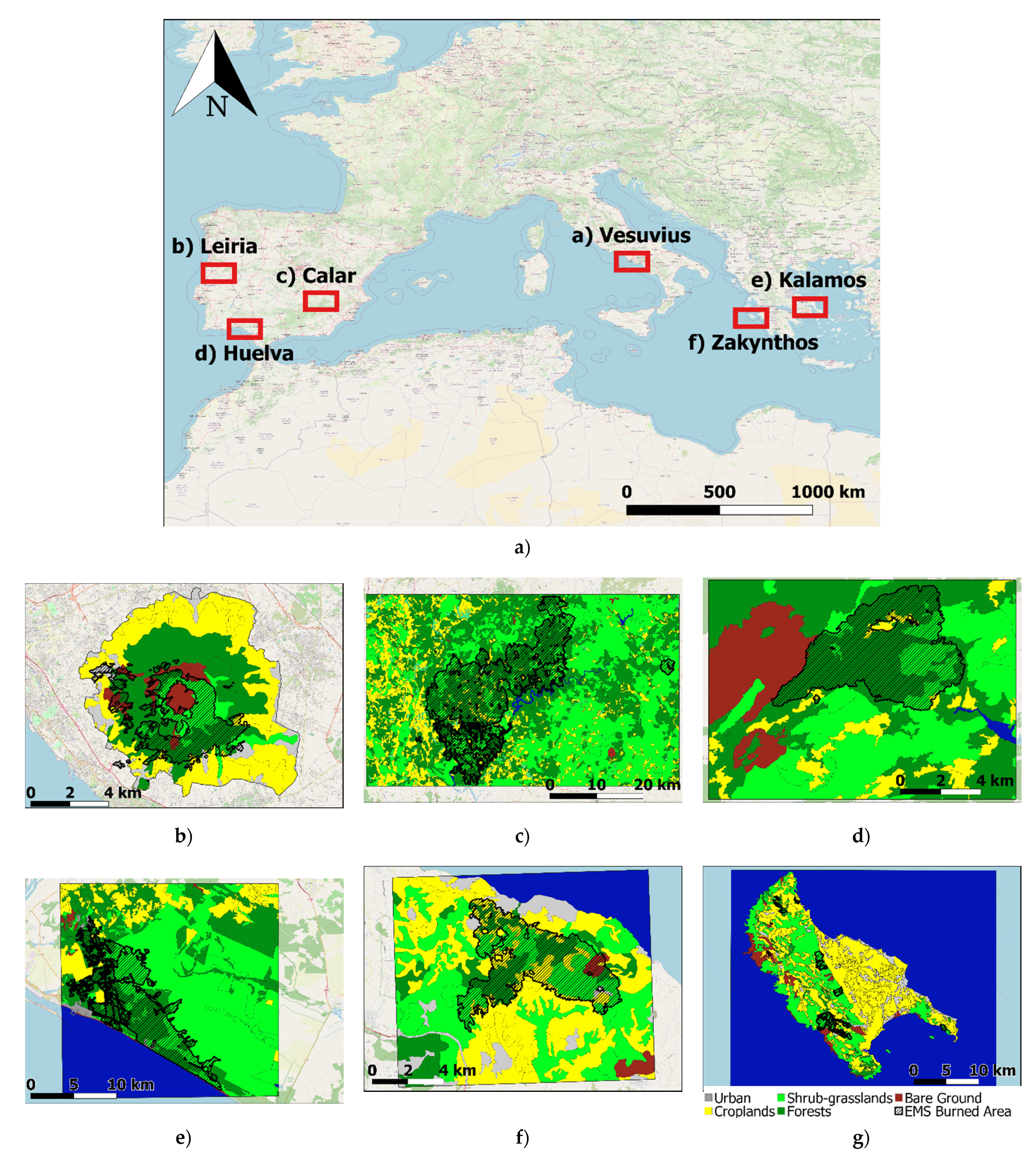
2. Study Areas and Datasets
2.1. Training and Exportability Sites
2.2. Sentinel-2 Dataset
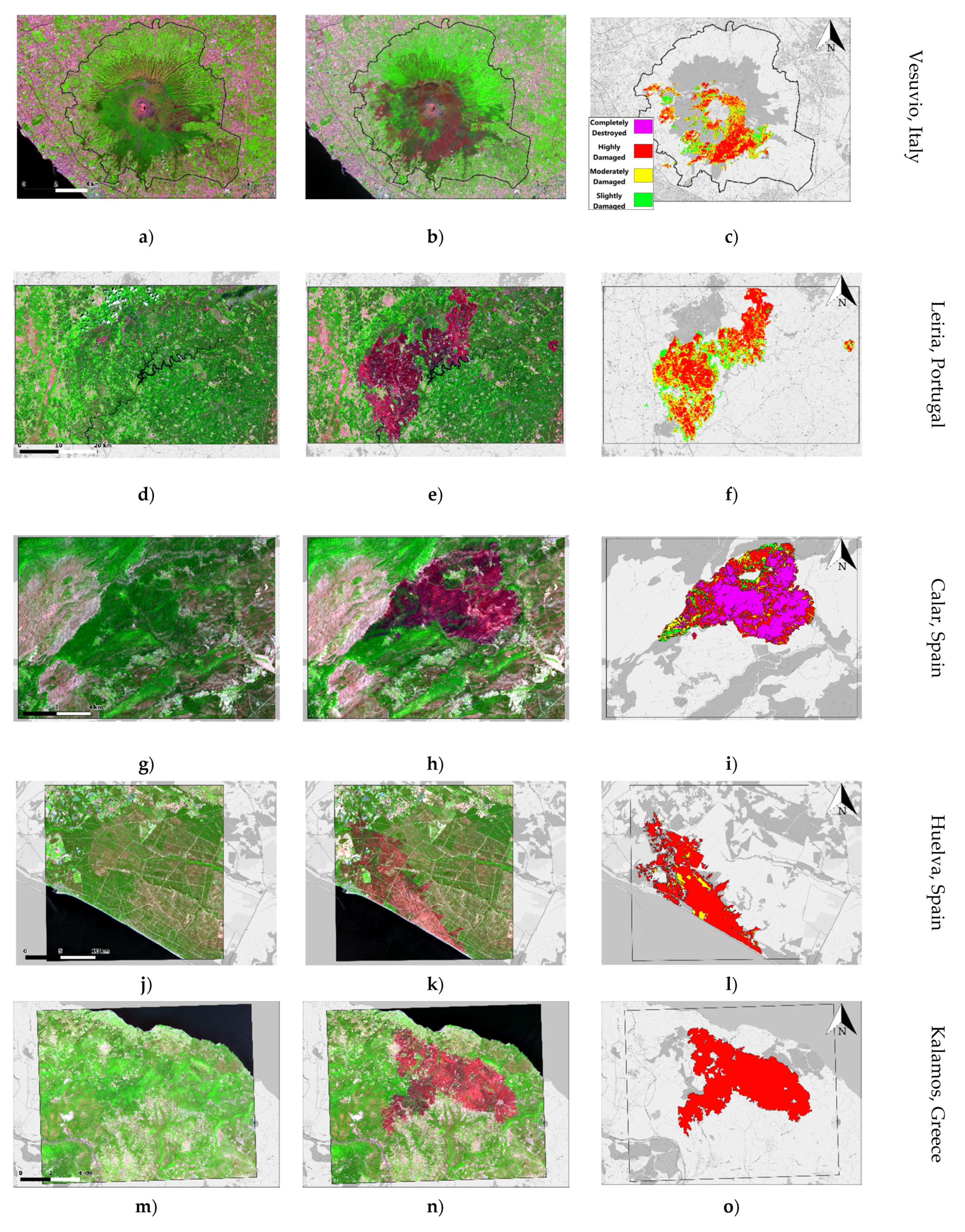
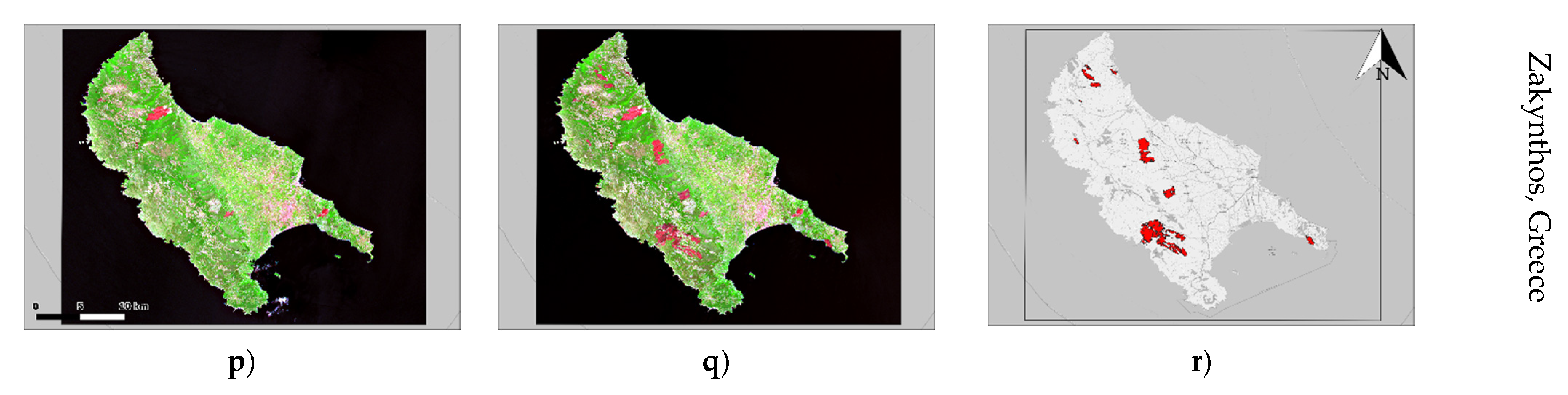
2.3. Reference Fire Perimeters
3. Methods
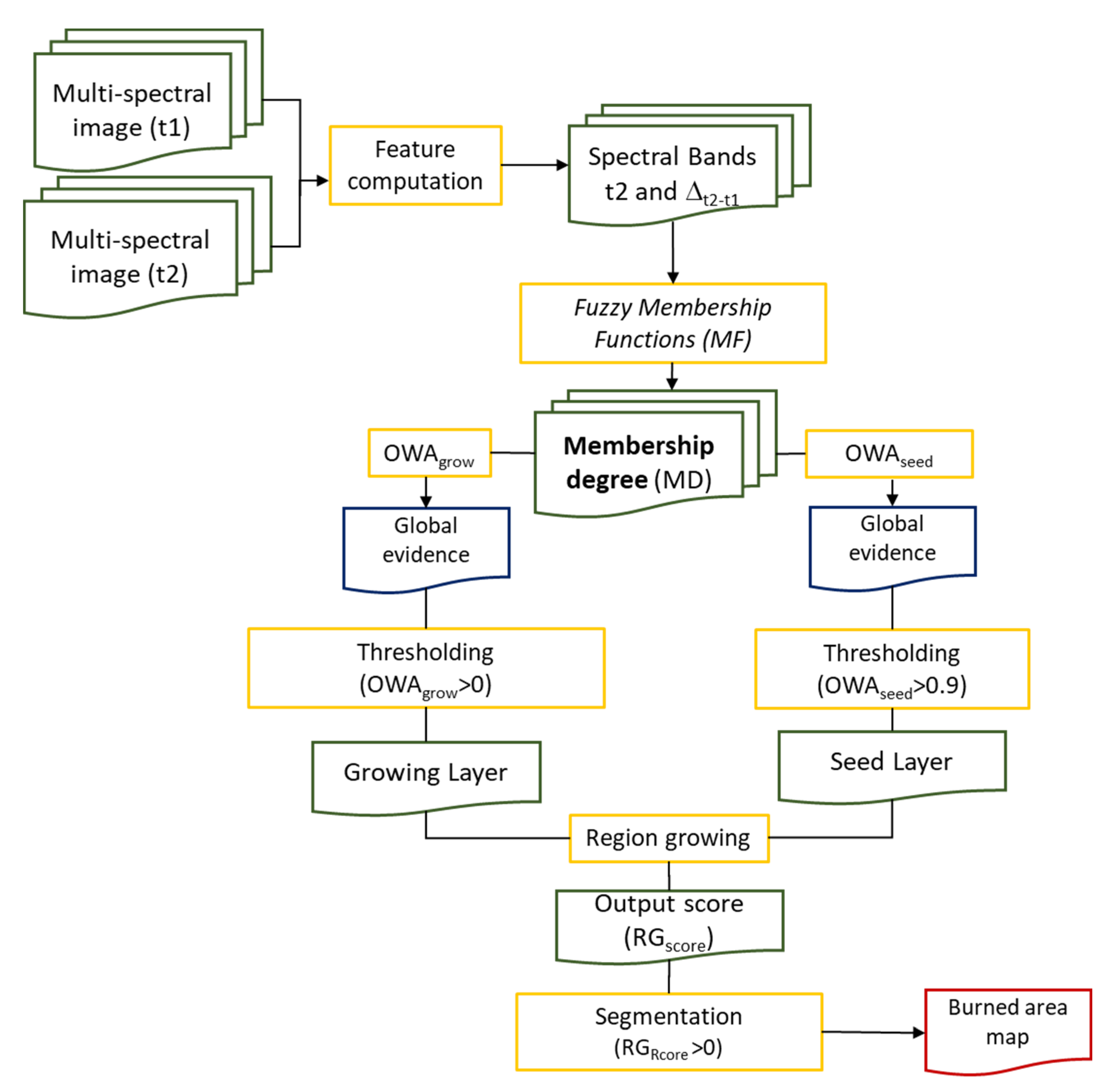
- Selection of the input features;
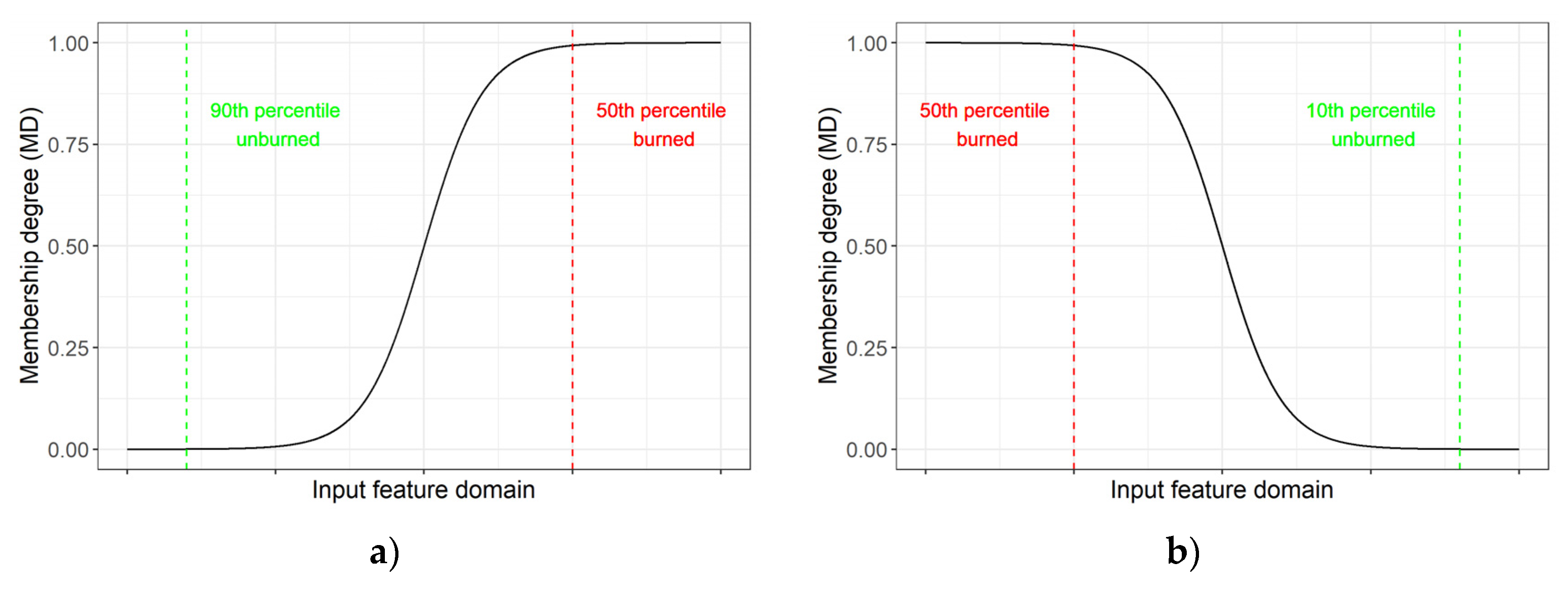
- Definition of the soft constraints (membership function, MF) for each input feature from training data and application to derive partial evidence of burn (MD);
- Selection of OWAs, according to their semantic, for the soft integration;
- Computation of the global degree of evidence of burn for generating seed and growing layers;
- Implementation of the RG algorithm;
- Segmentation of the RG output score to derive burned area maps.
3.1. Separability Analysis
3.2. Definition of the Membership Functions
3.3. OWA Operators for Computing Global Evidence
3.4. Region Growing
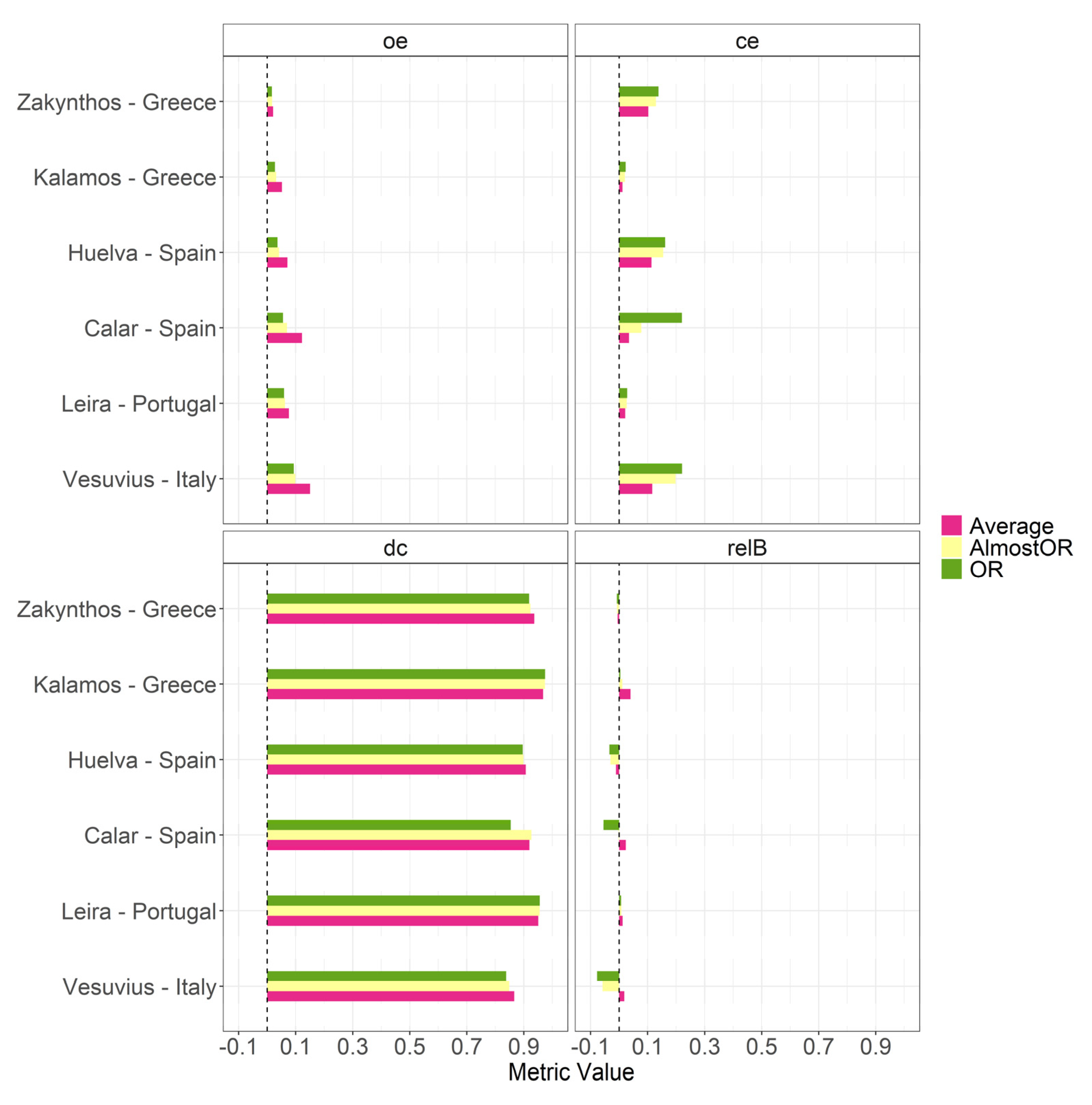
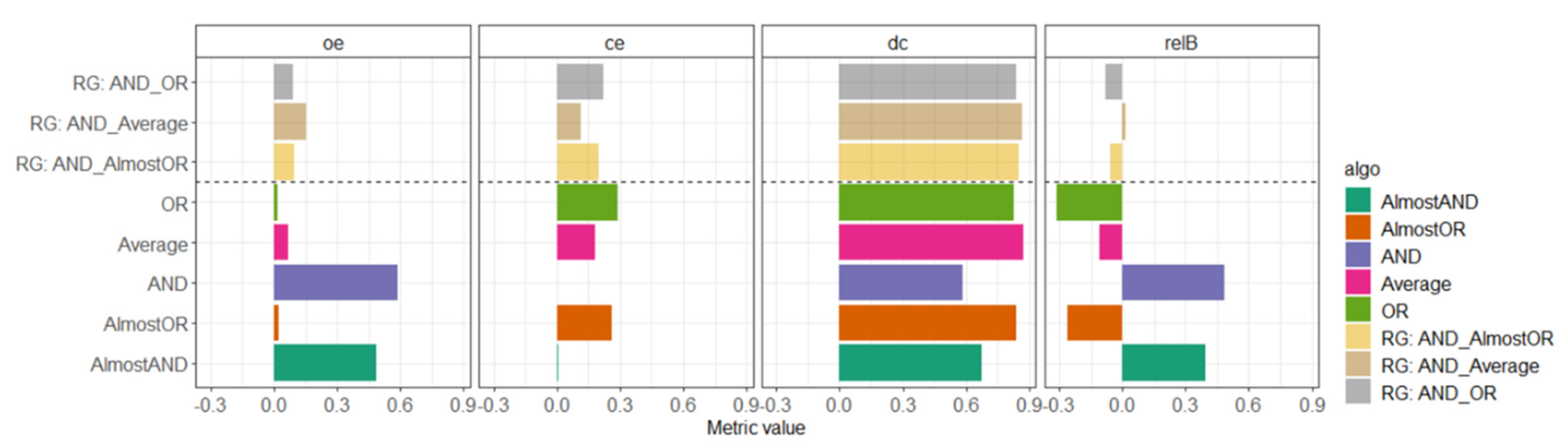
3.5. Validation
4. Results
4.1. Separability and Membership Functions
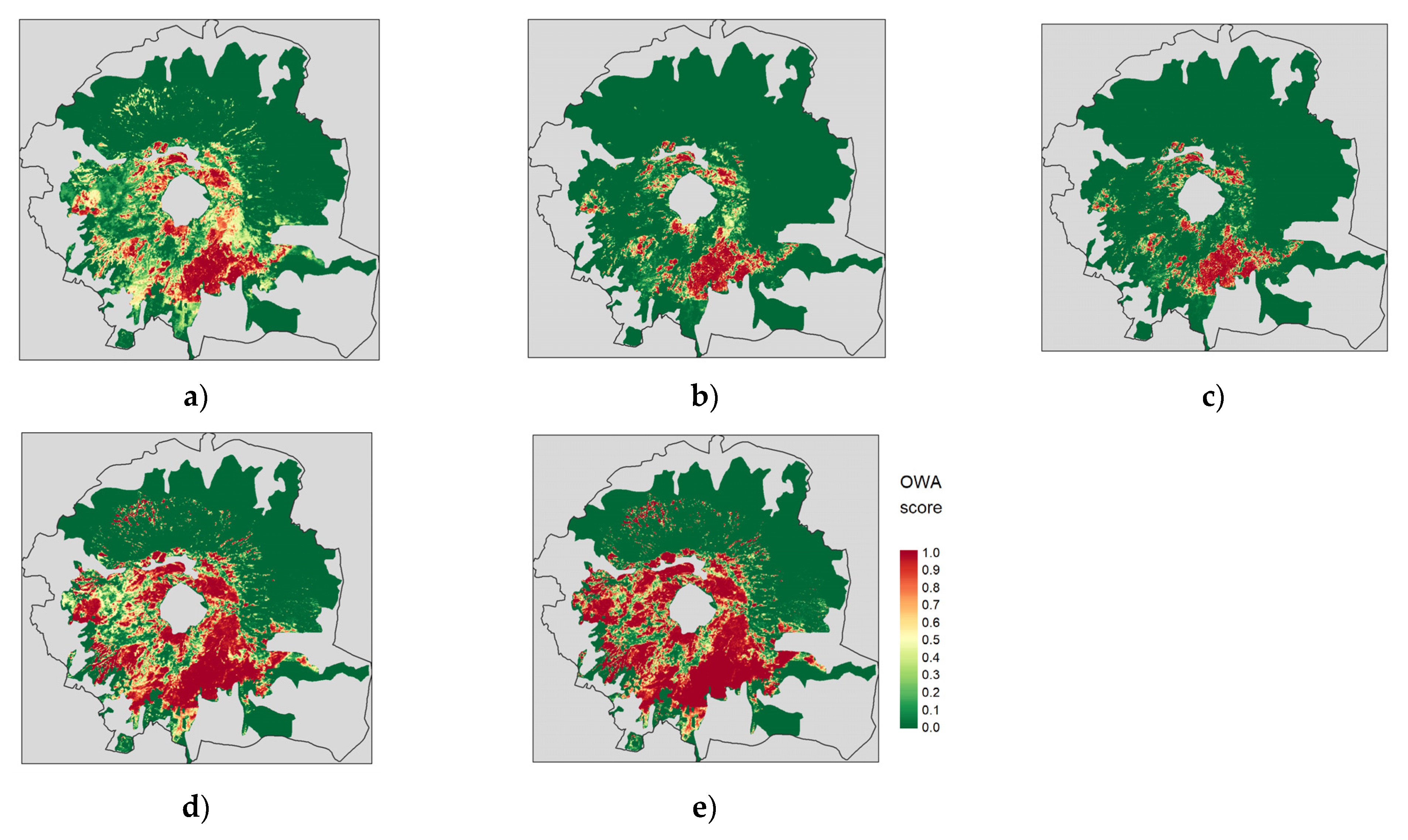
4.2. Partial and Global Evidence of Burn
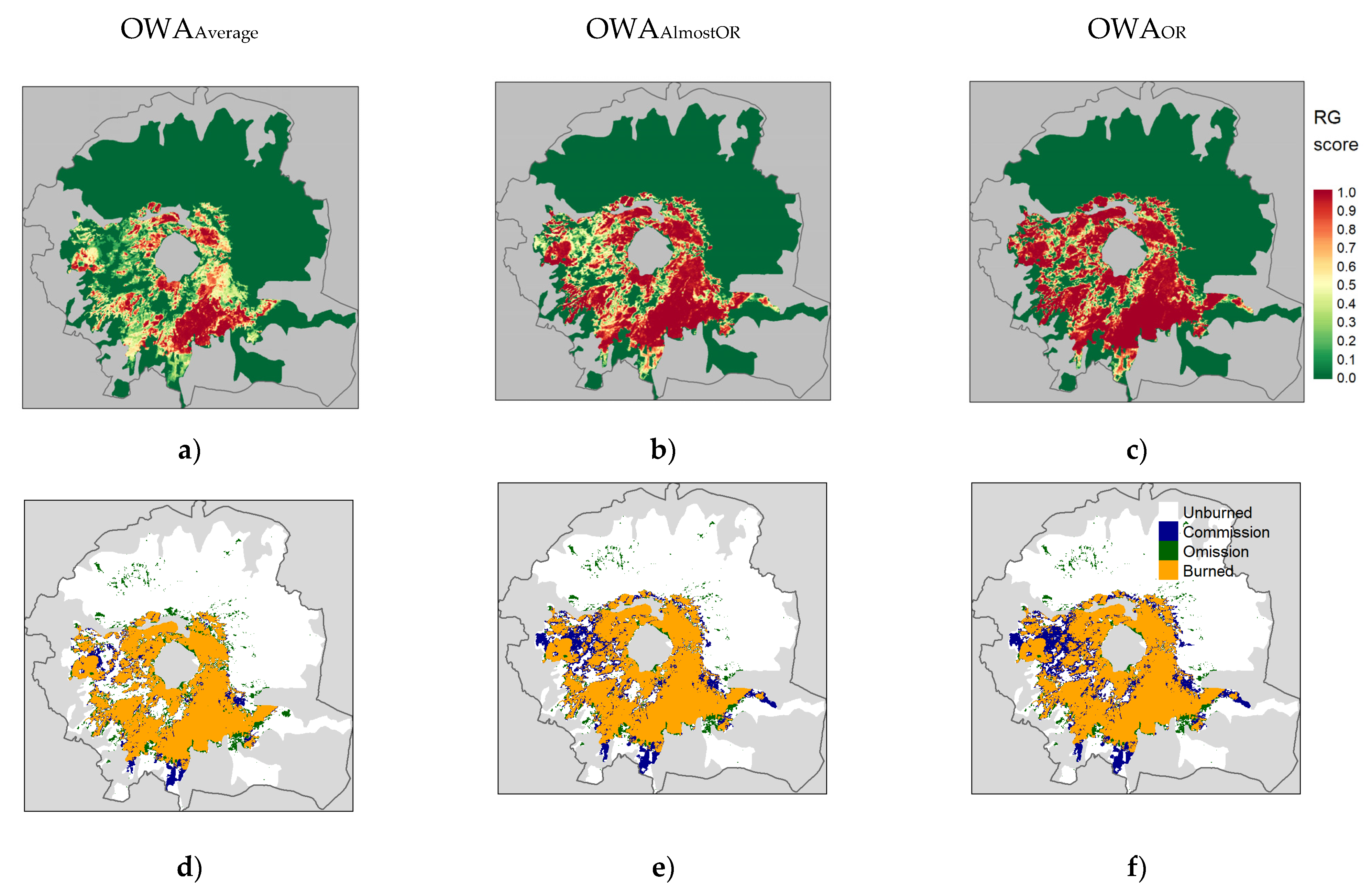
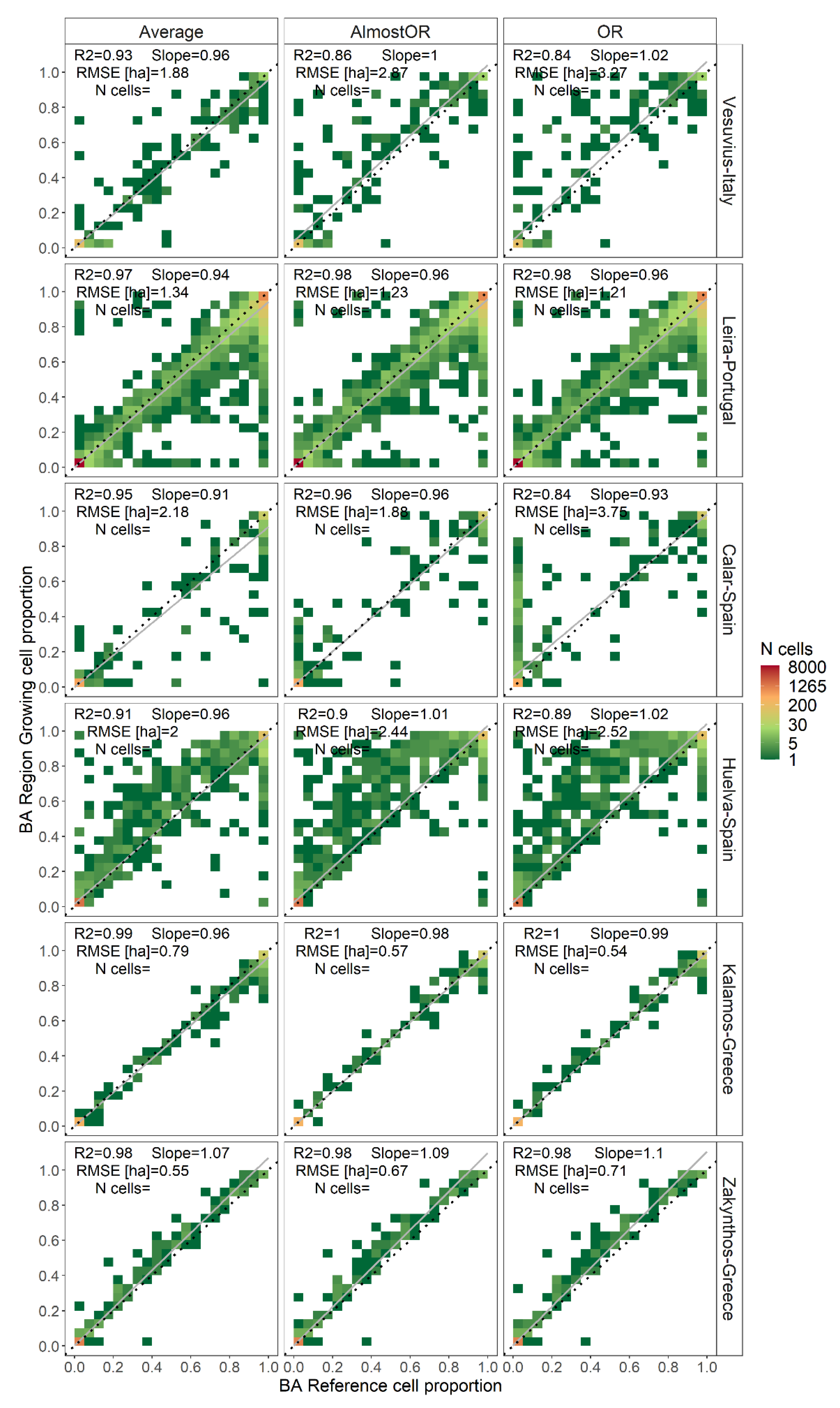
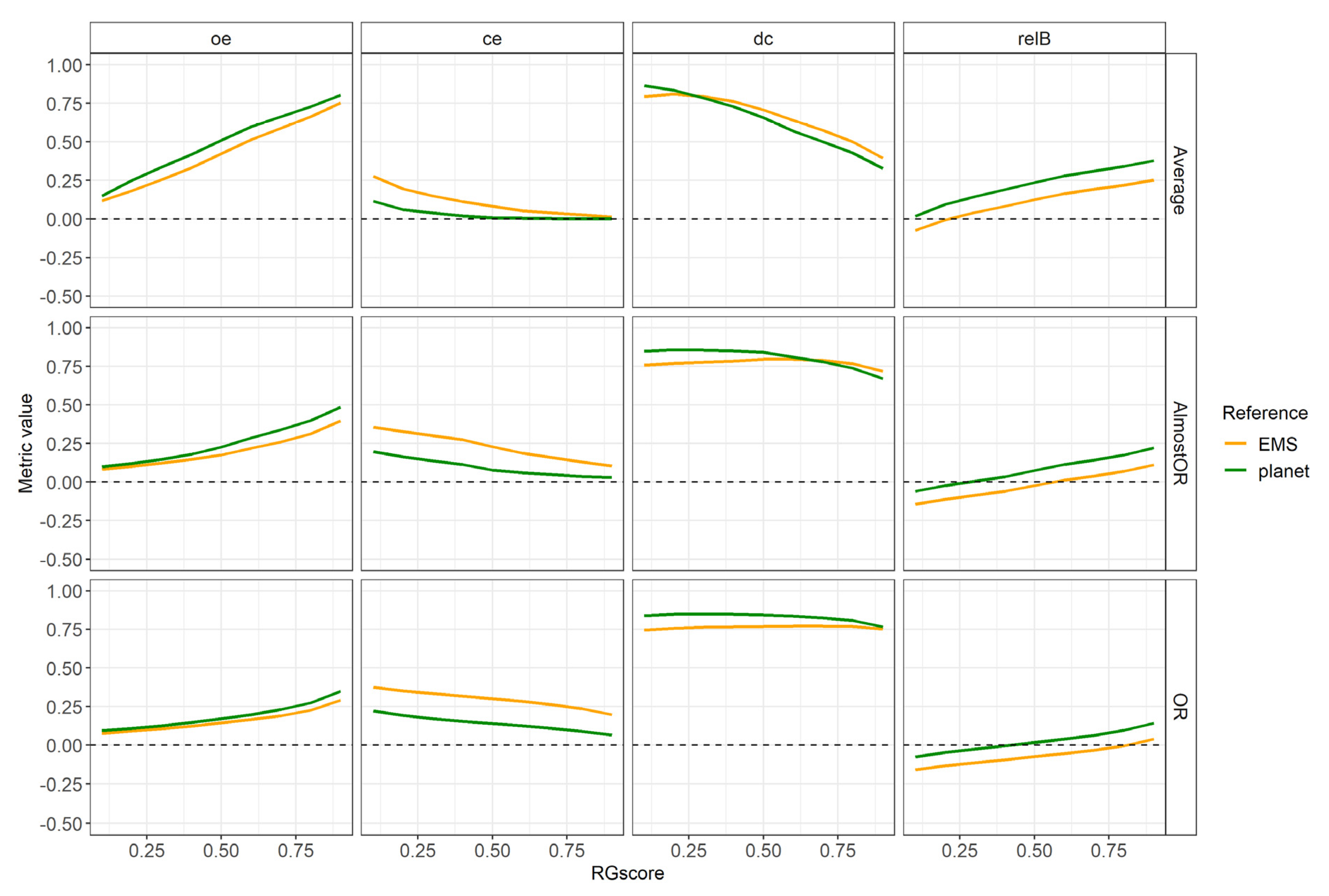
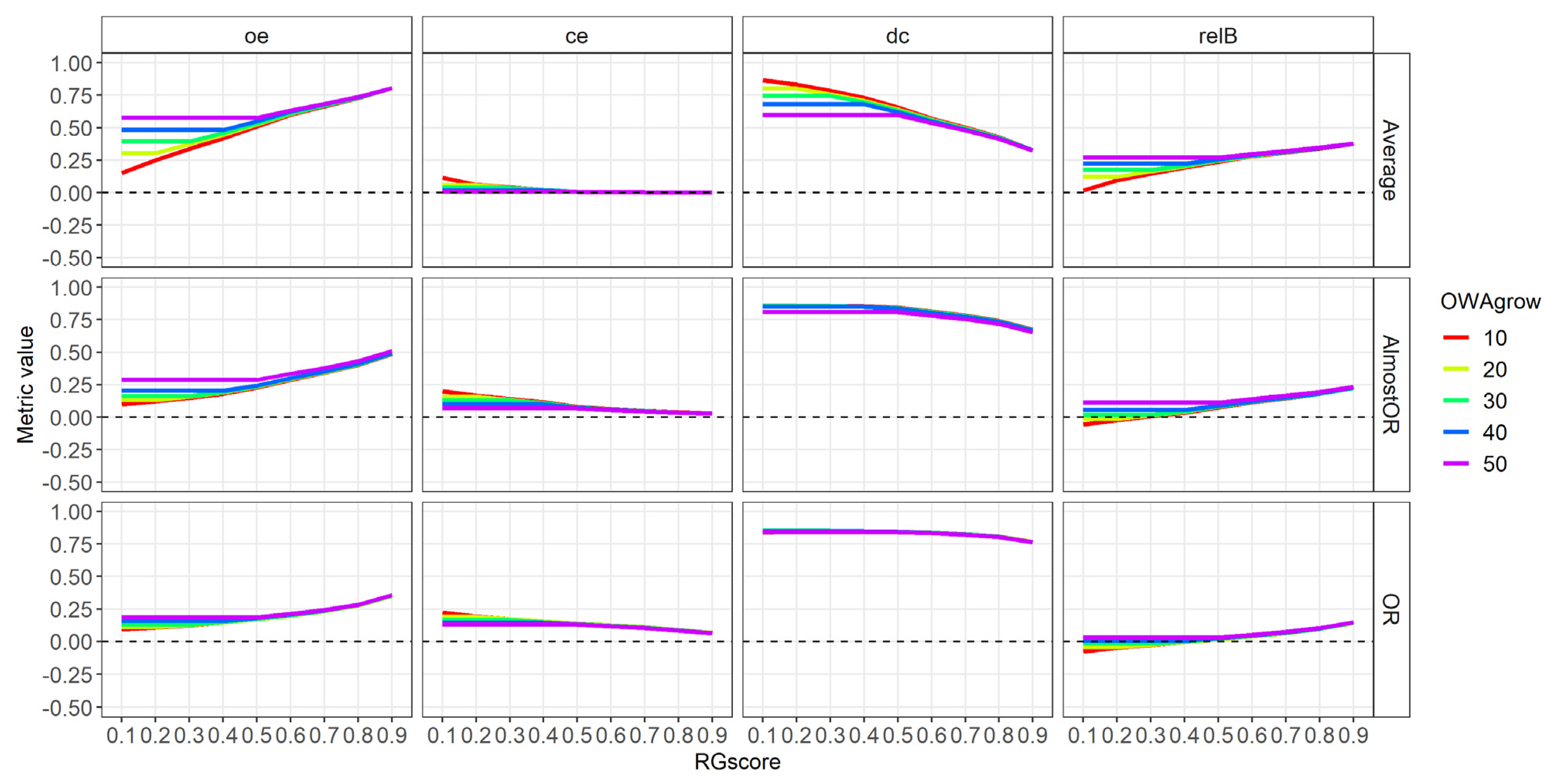
4.3. RG Burn Score and Validation
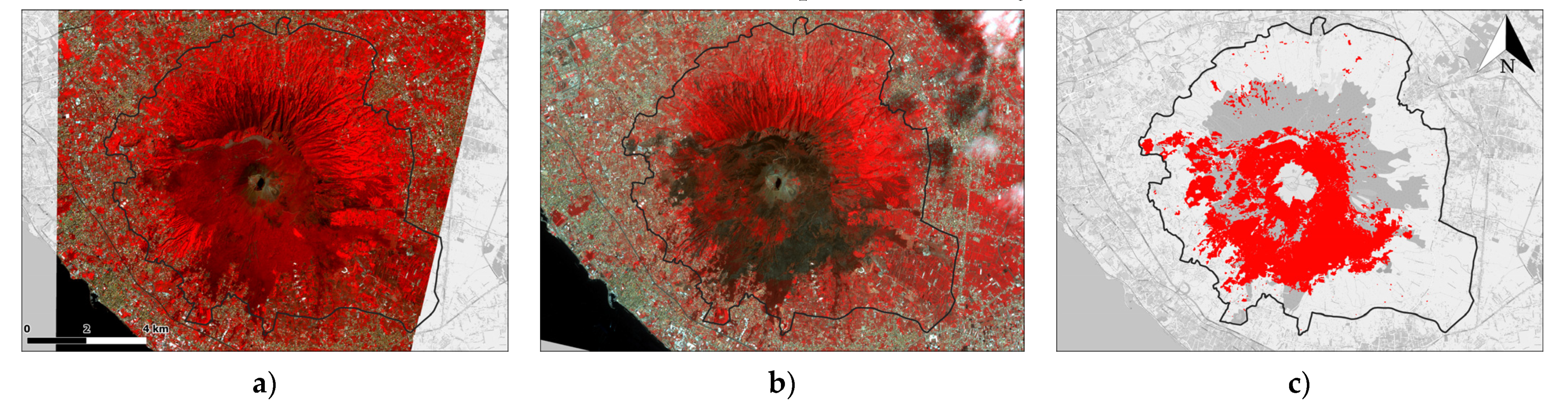
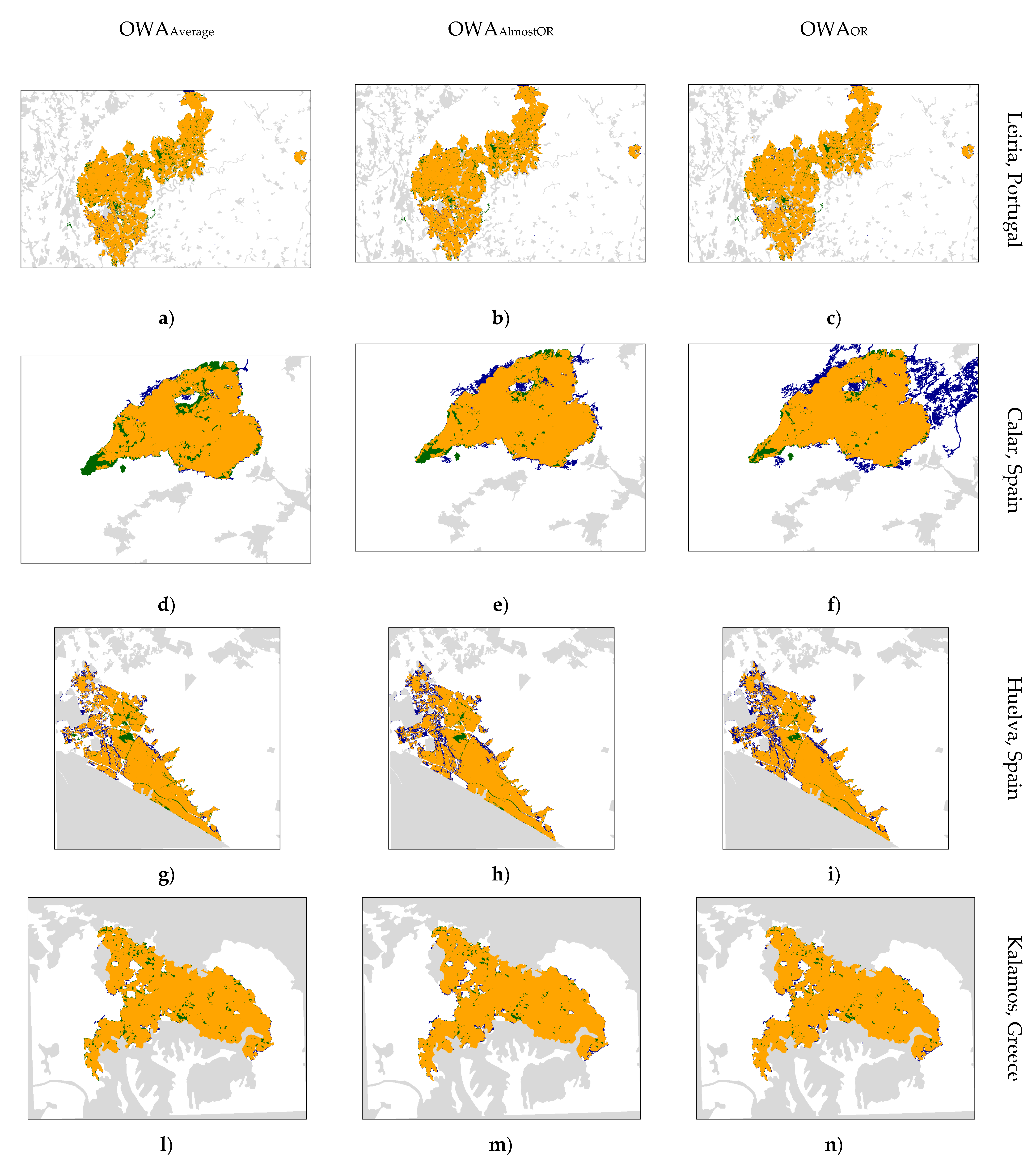
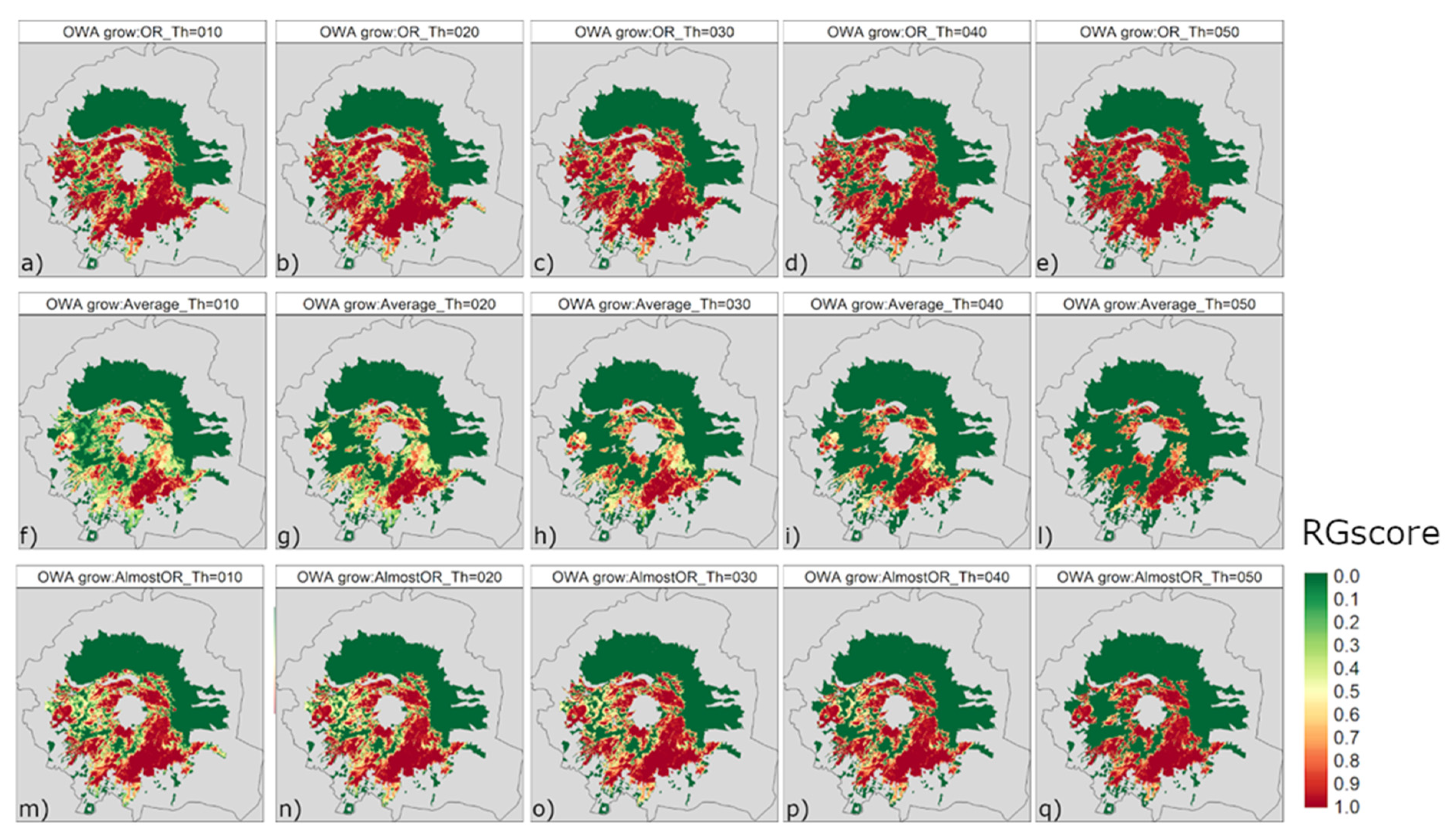
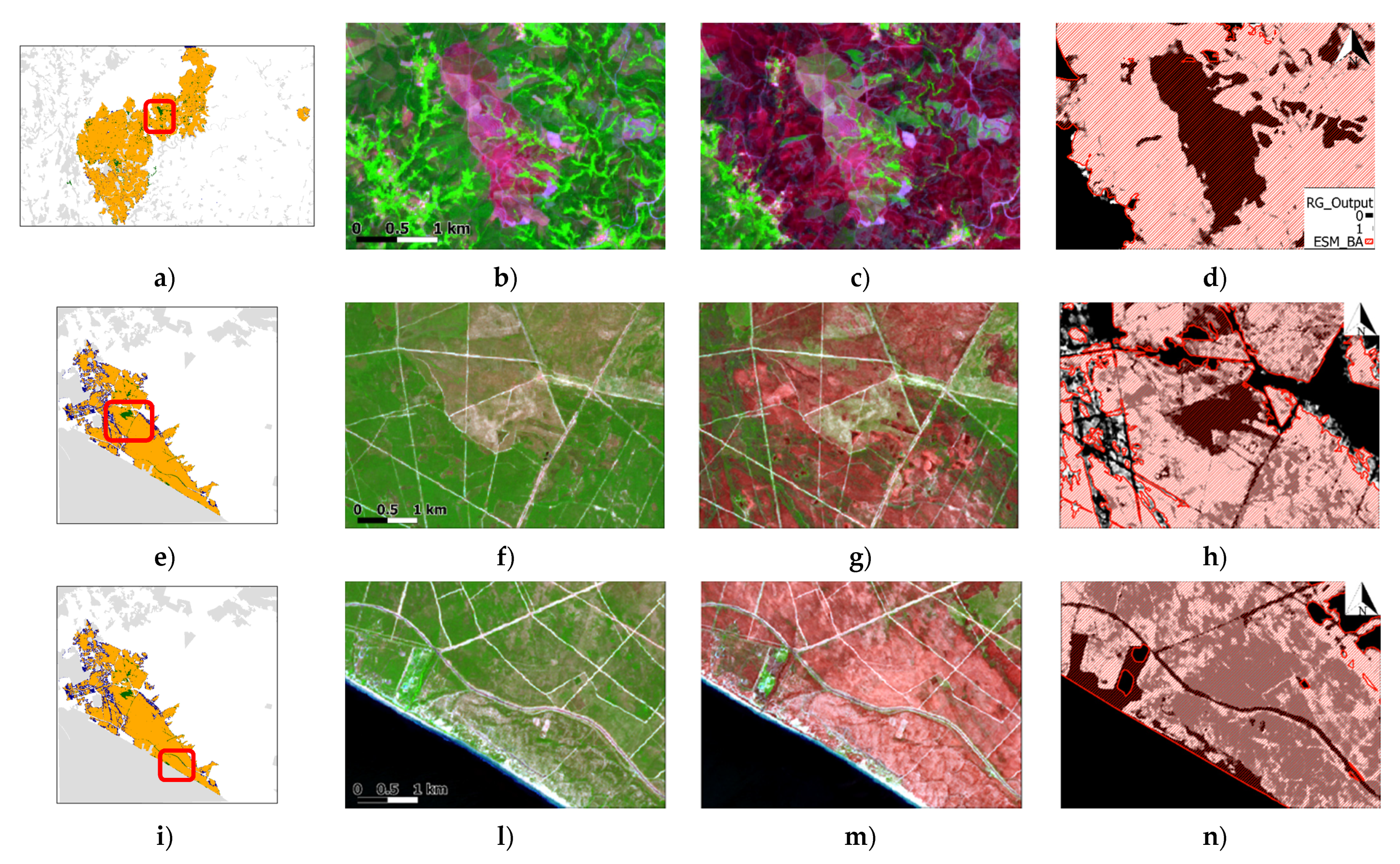
4.4. Exportability Results
- Seed layer: OWAAND;
- Seed selection: OWAAND > 0.9;
- Growing layers: OWAAverage, OWAAlmostOR and OWAOR;
- RG algorithm: OWAgrow > 0;
- Burned area mapping: RGscore > 0.
5. Discussion
6. Conclusions
- Customization to S2 imagery for implementing a convergence of evidence approach;
- Exploitation of additional spectral bands available from the S2 MSI instrument;
- Automatic interpretation of input features (e.g., post-fire and Δpost-pre reflectance) through membership functions (MFs) defined from training statistics (partial evidence of burn);
- Tests of OWA operators from AND-like (for seed selection) to OR-like (for growing layer) integration criteria;
- Implementation of OWA global evidence in a region growing (RG) algorithm;
- Accuracy assessment over a wide range of conditions/locations in Southern Europe for the 2017 summer fire season.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A




References
- Carvalho, A.; Monteiro, A.; Flannigan, M.; Solman, S.; Miranda, A.I.; Borrego, C. Forest fires in a changing climate and their impacts on air quality. Atmos. Environ. 2011, 45, 5545–5553. [Google Scholar] [CrossRef]
- Knorr, W.; Jiang, L.; Arneth, A. Climate, CO2 and human population impacts on global wildfire emissions. Biogeosciences 2016, 13, 267–282. [Google Scholar] [CrossRef] [Green Version]
- Jolly, W.M.; Cochrane, M.A.; Freeborn, P.H.; Holden, Z.A.; Brown, T.J.; Williamson, G.J.; Bowman, D.M.J.S. Climate-induced variations in global wildfire danger from 1979 to 2013. Nat. Commun. 2015, 6, 7537. [Google Scholar] [CrossRef] [PubMed]
- Abatzoglou, J.T.; Williams, A.P.; Barbero, R. Global emergence of anthropogenic climate change in fire weather indices. Geophys. Res. Lett. 2019, 46, 326–336. [Google Scholar] [CrossRef] [Green Version]
- Dupuy, J.L.; Fargeon, H.; Martin-St Paul, N.; Pimont, F.; Ruffault, J.; Guijarro, M.; Hernando, C.; Madrigal, J.; Fernandes, P. Climate change impact on future wildfire danger and activity in southern Europe: A review. Ann. Forest Sci. 2020, 77, 35. [Google Scholar] [CrossRef]
- Van der Werf, G.R.; Randerson, J.T.; Giglio, L.; Collatz, G.; Mu, M.; Kasibhatla, P.S.; Morton, D.C.; DeFries, R.S.; Jin, Y.; van Leeuwen, T.T. Global fire emissions and the contribution of deforestation, savanna, forest, agricultural, and peat fires (1997–2009). Atmos. Chem. Phys. 2010, 10, 11707–11735. [Google Scholar] [CrossRef] [Green Version]
- Yue, C.; Ciais, P.; Cadule, P.; Thonicke, K.; van Leeuwen, T.T. Modelling the role of fires in the terrestrial carbon balance by incorporating SPITFIRE into the global vegetation model ORCHIDEE—part 2: Carbon emissions and the role of fires in the global carbon balance. Geosci. Model Dev. 2015, 8, 1285–1297. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Levis, S.; Ward, D.S. Quantifying the role of fire in the Earth system—Part 1: Improved global fire modeling in the Community Earth System Model (CESM1). Biogeosciences 2013, 10, 2293–2314. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Bond-Lamberty, B.; Levis, S. Quantifying the role of fire in the Earth system—Part 2: Impact on the net carbon balance of global terrestrial ecosystems for the 20th century. Biogeosciences 2014, 11, 1345–1360. [Google Scholar] [CrossRef] [Green Version]
- Alonso-Canas, I.; Chuvieco, E. Global burned area mapping from ENVISAT-MERIS and MODIS active fire data. Remote Sens. Environ. 2015, 163, 140–152. [Google Scholar] [CrossRef]
- Libonati, R.; DaCamara, C.; Setzer, A.; Morelli, F.; Melchiori, A. An algorithm for burned area detection in the Brazilian cerrado using 4 µm MODIS imagery. Remote Sens. 2015, 7, 15782–15803. [Google Scholar] [CrossRef] [Green Version]
- Chuvieco, E.; Mouillot, F.; van der Werf, G.R.; San Miguel, J.; Tanase, M.; Koutsias, N.; García, M.; Yebra, M.; Padilla, M.; Gitas, I.; et al. Historical background and current developments for mapping burned area from satellite earth observation. Remote Sens. Environ. 2019, 225, 45–64. [Google Scholar] [CrossRef]
- Giglio, L.; Schroeder, W.; Justice, C.O. The collection 6 MODIS active fire detection algorithm and fire products. Remote Sens. Environ. 2016, 178, 31–41. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shimabukuro, Y.E.; Dutra, A.C.; Arai, E.; Duarte, V.; Cassol, H.L.G.; Pereira, G.; Cardozo, F.S. Mapping burned areas of mato grosso state Brazilian amazon using multisensor datasets. Remote Sens. 2020, 12, 3827. [Google Scholar] [CrossRef]
- Chuvieco, E.; Yue, C.; Heil, A.; Mouillot, F.; Alonso-Canas, I.; Padilla, M.; Pereira, J.M.; Oom, D.; Tansey, K. A new global burned area product for climate assessment of fire impacts. Glob. Ecol. Biogeogr. 2016, 25, 619–629. [Google Scholar] [CrossRef] [Green Version]
- Pereira, A.A.; Pereira, J.M.C.; Libonati, R.; Oom, D.; Setzer, A.W.; Morelli, F.; Machado-Silva, F.; de Carvalho, L.M.T. Burned area mapping in the Brazilian savanna using a one-class support vector machine trained by active fires. Remote Sens. 2017, 9, 1161. [Google Scholar] [CrossRef] [Green Version]
- Randerson, J.T.; Chen, Y.; van der Werf, G.R.; Rogers, B.M.; Morton, D.C. Global burned area and biomass burning emissions from small fires. Biogeoscience 2012, 117. [Google Scholar] [CrossRef]
- Filipponi, F. Exploitation of sentinel-2 time series to map burned areas at the national level: A case study on the 2017 Italy wildfires. Remote Sens. 2019, 11, 622. [Google Scholar] [CrossRef] [Green Version]
- Roteta, E.; Bastarrika, A.; Padilla, M.; Storm, T.; Chuvieco, E. Development of a sentinel-2 burned area algorithm: Generation of a small fire database for sub-Saharan Africa. Remote Sens. Environ. 2019, 222, 1–17. [Google Scholar] [CrossRef]
- Stavrakoudis, D.; Katagis, T.; Minakou, C.; Gitas, I.Z. Automated burned scar mapping using sentinel-2 imagery. J. Geogr. Inf. Syst. 2020, 12, 221–240. [Google Scholar] [CrossRef]
- Roy, D.; Huang, H.; Boschetti, L.; Giglio, L.; Yan, L.; Zhang, H.; Li, Z. Landsat-8 and Sentinel-2 burned area mapping—a combined sensor multi-temporal change detection approach. Remote Sens. Environ. 2019, 231, 111254. [Google Scholar] [CrossRef]
- Boschetti, L.; Roy, D.; Justice, C.O.; Michael, L.; Humber, M.L. MODIS–Landsat fusion for large area 30 m burned area mapping. Remote Sens. Environ. 2015, 161, 27–42. [Google Scholar]
- Li, J.; Roy, D.P. A Global analysis of sentinel-2a, sentinel-2b andlandsat-8 data revisit intervals and implications for terrestrial monitoring. Remote Sens. 2017, 9, 902. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Zheng, Y.; Dalponte, M.; Tong, X. A novel fire index-based burned area change detection approach using Landsat-8 OLI data. Eur. J. Remote Sens. 2020, 53, 104–112. [Google Scholar] [CrossRef] [Green Version]
- Bastarrika, A.; Chuvieco, E.; Martín, M.P. Mapping burned areas from Landsat TM/ETM+ data with a two-phase algorithm: Balancing omission and commission errors. Remote Sens. Environ. 2011, 115, 1003–1012. [Google Scholar] [CrossRef]
- Stroppiana, D.; Bordogna, G.; Carrara, P.; Boschetti, M.; Boschetti, L.; Brivio, P.A. A method for extracting burned areas from Landsat TM/ETM+ images by soft aggregation of multiple Spectral Indices and a region growing algorithm. ISPRS J. Photogramm. Remote Sens. 2012, 69, 88–102. [Google Scholar] [CrossRef]
- Goffi, A.; Stroppiana, D.; Brivio, P.A.; Bordogna, G.; Boschetti, M. Towards an automated approach to map flooded areas from Sentinel-2 MSI data and soft integration of water spectral features. Int. J. Appl. Earth Obs. 2020, 84, 101951. [Google Scholar] [CrossRef]
- Yager, R.R. On ordered weighted averaging aggregation operators in multi-criteria decision making. IEEE Trans. Syst. Man Cybern. 1988, 18, 183–190. [Google Scholar] [CrossRef]
- Sánchez-Benítez, A.; García-Herrera, R.; Barriopedro, D.; Sousa, P.M.; Trigo, R.M. June 2017: The earliest european summer mega-heatwave of reanalysis period. Geophys. Res. Lett. 2018, 45, 1955–1962. [Google Scholar] [CrossRef]
- Turco, M.; Jerez, S.; Augusto, S.; Tarin-Carrasco, P.; Ratola, N.; Jimenez-Guerrero, P.; Trigo, R.M. Climate drivers of the 2017 devastating fires in Portugal. Sci. Rep. 2019, 9, 13886. [Google Scholar] [CrossRef]
- Ranghetti, L.; Busetto, L. Sen2r: An R Toolbox to Find, Download and Preprocess Sentinel-2 Data. R Package Version 1.0.0. 2019. Available online: http://sen2r.ranghetti.info (accessed on 1 May 2021).
- Main-Knorn, M.; Pflug, B.; Louis, J.; Debaecker, V.; Müller-Wilm, U.; Gascon, F. Sen2Cor for sentinel-2. In Proceedings of the SPIE 10427, Image and Signal Processing for Remote Sensing XXIII, Warsaw, Poland, 10–14 September 2017; p. 1042704. [Google Scholar]
- Louis, J.; Charantonis, A.; Berthelot, B. Cloud detection for sentinel-2. In Proceedings of the ESA Living Planet Symposium, Bergen, Norway, 28 June–2 July 2010. [Google Scholar]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth. San Francisco, CA. 2017. Available online: https://api.planet.com (accessed on 1 May 2021).
- Lemajic, S.; Vajsová, B.; Aastrand, P. New Sensors Benchmark Report on PlanetScope: Geometric Benchmarking Test for Common Agricultural Policy (CAP) Purposes; Publications Office of the European Union: Luxembourg, 2018; ISBN 978-92-79-92833-8. JRC111221. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Ramo, R.; Chuvieco, E. Developing a random forest algorithm for MODIS global burned area classification. Remote Sens. 2017, 9, 1193. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Boschetti, M.; Nutini, F.; Manfron, G.; Brivio, P.A.; Nelson, A. Comparative analysis of normalised difference spectral indices derived from MODIS for detecting surface water in flooded rice cropping systems. PLoS ONE 2014, 9, e88741. [Google Scholar] [CrossRef] [PubMed]
- Carrara, P.; Bordogna, G.; Boschetti, M.; Brivio, P.A.; Nelson, A.; Stroppiana, D. A flexible multi-source spatial-data fusion system for environmental status assessment at continental scale. Int. J. Geogr. Inf. Sci. 2008, 22, 781–799. [Google Scholar] [CrossRef]
- Goffi, A.; Bordogna, G.; Stroppiana, D.; Boschetti, M.; Brivio, P.A. Knowledge and data-driven mapping of environmental status indicators from remote sensing and VGI. Remote Sens. 2020, 12, 495. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2008; p. 346. [Google Scholar]
- Roy, D.P.; Jin, Y.; Lewis, P.E.; Justice, C.O. Prototyping a global algorithm for systematic fire-affected area mapping using MODIS time series data. Remote Sens. Environ. 2005, 97, 137–162. [Google Scholar] [CrossRef]
- Clevers, J.G.; Gitelson, A.A. Remote estimation of crop and grass chlorophyll and nitrogen content using red-edge bands on Sentinel-2 and -3. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 344–351. [Google Scholar] [CrossRef]
- Saulino, L.; Rita, A.; Migliozzi, A.; Maffei, C.; Allevato, E.; Garonna, A.P.; Saracino, A. Detecting burn severity across mediterranean forest types by coupling medium-spatial resolution satellite imagery and field data. Remote Sens. 2020, 12, 741. [Google Scholar] [CrossRef] [Green Version]
- Boschetti, L.; Roy, D.P.; Giglio, L.; Huang, H.; Zubkova, M.; Humber, M.L. Global validation of the collection 6 MODIS burned area product. Remote Sens. Environ. 2019, 235, 111490. [Google Scholar] [CrossRef]
- Huang, H.; Roy, D.P.; Boschetti, L.; Zhang, H.K.; Yan, L.; Kumar, S.S.; Gomez-Dans, J.; Li, J. Separability analysis of sentinel-2a multi-spectral instrument (MSI) data for burned area discrimination. Remote Sens. 2016, 8, 873. [Google Scholar] [CrossRef] [Green Version]
- Pulvirenti, L.; Squicciarino, G.; Fiori, E.; Fiorucci, P.; Ferraris, L.; Negro, D.; Gollini, A.; Severino, M.; Puca, S. An automatic processing chain for near real-time mapping of burned forest areas using sentinel-2 data. Remote Sens. 2020, 12, 674. [Google Scholar] [CrossRef] [Green Version]
- Smiraglia, D.; Filipponi, F.; Mandrone, S.; Tornato, A.; Taramelli, A. Agreement index for burned area mapping: Integration of multiple spectral indices using sentinel-2 satellite images. Remote Sens. 2020, 12, 1862. [Google Scholar] [CrossRef]
- Seydi, S.T.; Akhoondzadeh, M.; Amani, M.; Mahdavi, S. Wildfire damage assessment over Australia using sentinel-2 imagery and MODIS land cover product within the google earth engine cloud platform. Remote Sens. 2021, 13, 220. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CLC2012 Class (%) | EMS Fire Damage | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Bare | Crops | Forest | Shrub | Urban | CD | HD | MD | ND | ||
| Vesuvius Italy | Site | 6.6 | 38.7 | 36.5 | 10.4 | 7.78 | 0.0 | 12.8 | 3.7 | 2.3 |
| BA | 3.4 | 4.8 | 47.2 | 34.4 | 10.26 | 0.0 | 68.2 | 19.7 | 12.0 | |
| Leiria Portugal | Site | 0.2 | 15.4 | 43.1 | 40.2 | 1.10 | 0.0 | 8.9 | 5.6 | 2.3 |
| BA | - | 5.6 | 66.7 | 27.5 | 0.17 | 0.0 | 53.0 | 33.1 | 13.8 | |
| Calar Spain | Site | 13.6 | 8.2 | 61.2 | 17.0 | - | 18.9 | 16.5 | 3.6 | 2.0 |
| BA | 0.3 | 2.4 | 76.4 | 20.9 | - | 46.2 | 40.2 | 8.7 | 4.9 | |
| Huelva Spain | Site | 0.8 | 11.9 | 39.7 | 46.6 | 0.89 | 0.0 | 15.4 | 1.1 | 0.0 |
| BA | 0.2 | 0.1 | 61.2 | 37.7 | 0.71 | 0.0 | 93.1 | 6.7 | 0.2 | |
| Zakynthos Greece | Site | 5.1 | 52.5 | 32.5 | 3.7 | 6.17 | - | 3.2 | - | - |
| BA | 2.3 | 14.6 | 81.8 | 1.3 | 0.02 | - | 100 | - | - | |
| Kalamos Greece | Site | 2.0 | 40.6 | 24.2 | 24.7 | 8.36 | - | 20.0 | - | - |
| BA | 3.3 | 25.1 | 33.9 | 36.3 | 1.37 | 100 | - | - | ||
| Study Site | Pre-Fire S2 | Post-Fire S2 | EMS Date | EMS Source (https://emergency.copernicus.eu/mapping/list-of-activations-rapid, access 1 May 2021) |
|---|---|---|---|---|
| Vesuvius—Italy | 08/04 | 22/07 | 16/07 | EMSR213 |
| Leiria—Portugal | 04/06 | 04/07 | 20/06 | EMSR207 |
| Calar—Spain | 15/07 | 04/08 | 04/08 | EMSR216 |
| Huelva—Spain | 11/06 | 01/07 | 27/06 | EMSR209 |
| Zakynthos—Greece | 25/07 | 03/09 | 18/08 | EMSR224 |
| Kalamos—Greece | 28/07 | 17/08 | 18/08 | EMSR224 |
| S2 Band | M Post fFire | M ΔPost Fire-Pre Fire |
|---|---|---|
| Green (b3) | 0.577 | 0.027 |
| Red (b4) | 0.321 | 0.454 |
| RE1 (b5) | 0.879 | 0.214 |
| RE2 (b6) | 2.091 | 1.571 |
| RE3 (b7) | 1.917 | 1.561 |
| NIR (b8) | 1.812 | 1.530 |
| SWIR1 (b11) | 0.873 | 0.099 |
| SWIR2 (b12) | 0.029 | 1.100 |
| S2 Band | Burned | Unburned | MF Parameters | |||||
|---|---|---|---|---|---|---|---|---|
| 10% | 50% | 90% | 10% | 50% | 90% | k | x0 | |
| PostRE2 | 0.058 | 0.074 | 0.102 | 0.147 | 0.220 | 0.286 | −125.89 | 0.111 |
| PostRE3 | 0.061 | 0.077 | 0.112 | 0.156 | 0.249 | 0.339 | −115.77 | 0.116 |
| PostNIR | 0.054 | 0.073 | 0.115 | 0.147 | 0.264 | 0.370 | −123.66 | 0.109 |
| ΔRE2 | −0.126 | −0.098 | −0.063 | −0.021 | 0.012 | 0.088 | −120.29 | −0.06 |
| ΔRE3 | −0.158 | −0.124 | −0.075 | −0.026 | 0.012 | 0.108 | −93.721 | −0.075 |
| ΔNIR | −0.180 | −0.139 | −0.085 | −0.034 | 0.011 | 0.111 | −87.14 | −0.086 |
| ΔSWIR2 | 0.025 | 0.063 | 0.114 | −0.030 | 0.0084 | 0.024 | 236.98 | 0.044 |
| OWAgrow | oe | ce | dc | RelB (%) | Tot BA RG (ha) | Tot BA REF (ha) |
|---|---|---|---|---|---|---|
| Average | 0.15 | 0.12 | 0.87 | +1.82 | 1676.39 | 1744.07 |
| AlmostOR | 0.10 | 0.20 | 0.85 | −5.81 | 1959.69 | |
| OR | 0.09 | 0.22 | 0.84 | −7.70 | 2029.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sali, M.; Piaser, E.; Boschetti, M.; Brivio, P.A.; Sona, G.; Bordogna, G.; Stroppiana, D. A Burned Area Mapping Algorithm for Sentinel-2 Data Based on Approximate Reasoning and Region Growing. Remote Sens. 2021, 13, 2214. https://doi.org/10.3390/rs13112214
Sali M, Piaser E, Boschetti M, Brivio PA, Sona G, Bordogna G, Stroppiana D. A Burned Area Mapping Algorithm for Sentinel-2 Data Based on Approximate Reasoning and Region Growing. Remote Sensing. 2021; 13(11):2214. https://doi.org/10.3390/rs13112214
Chicago/Turabian StyleSali, Matteo, Erika Piaser, Mirco Boschetti, Pietro Alessandro Brivio, Giovanna Sona, Gloria Bordogna, and Daniela Stroppiana. 2021. "A Burned Area Mapping Algorithm for Sentinel-2 Data Based on Approximate Reasoning and Region Growing" Remote Sensing 13, no. 11: 2214. https://doi.org/10.3390/rs13112214
APA StyleSali, M., Piaser, E., Boschetti, M., Brivio, P. A., Sona, G., Bordogna, G., & Stroppiana, D. (2021). A Burned Area Mapping Algorithm for Sentinel-2 Data Based on Approximate Reasoning and Region Growing. Remote Sensing, 13(11), 2214. https://doi.org/10.3390/rs13112214