
Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM


Abstract
:
1. Introduction
2. Data Preparation
2.1. Data Set Selection
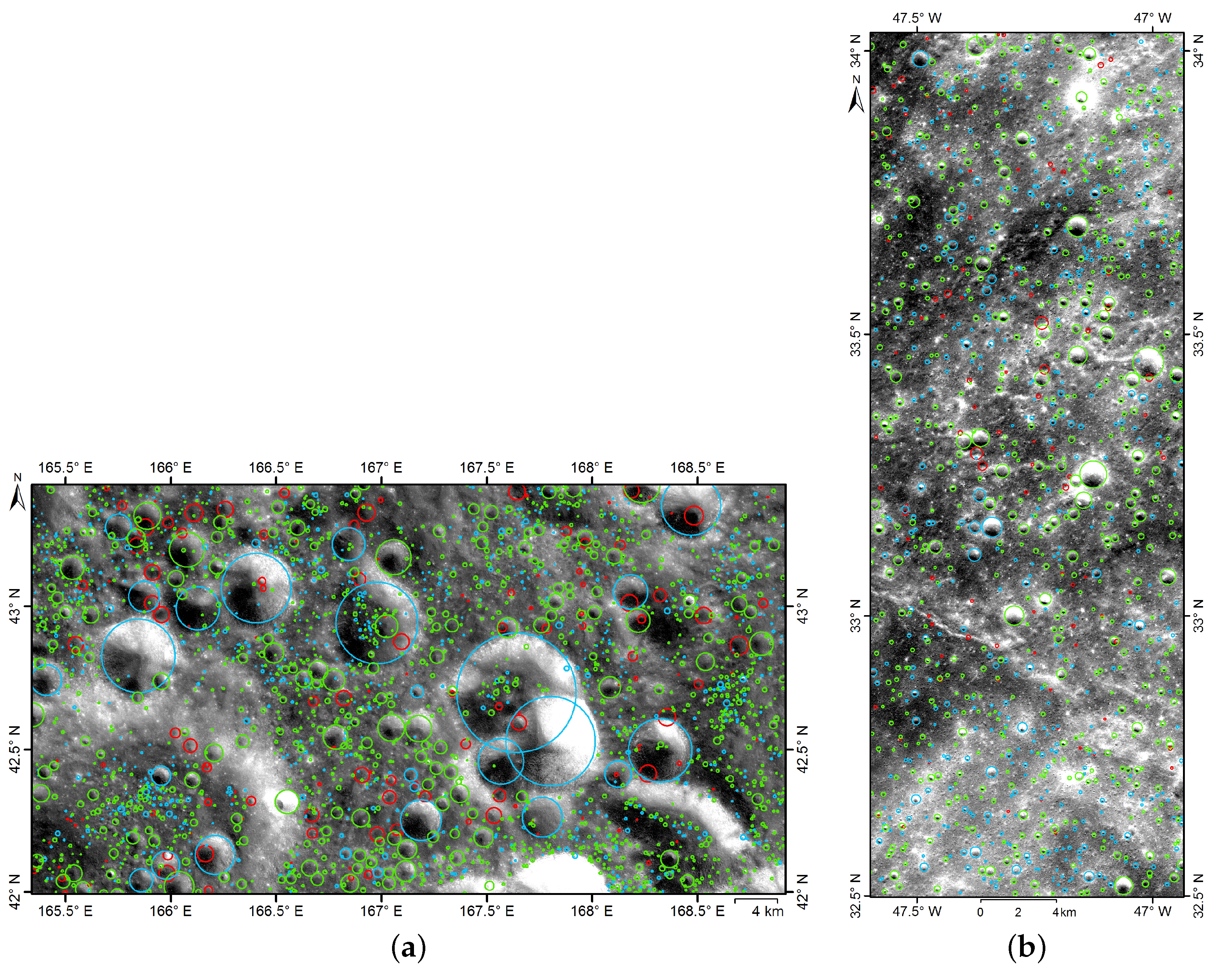
2.2. Data Set Labeling
- The diameter of a sample crater is no more than 1000 m.
- The shadow direction of any given crater in the same area is consistent, as a dome has opposite shadow direction in the same area at the same time.
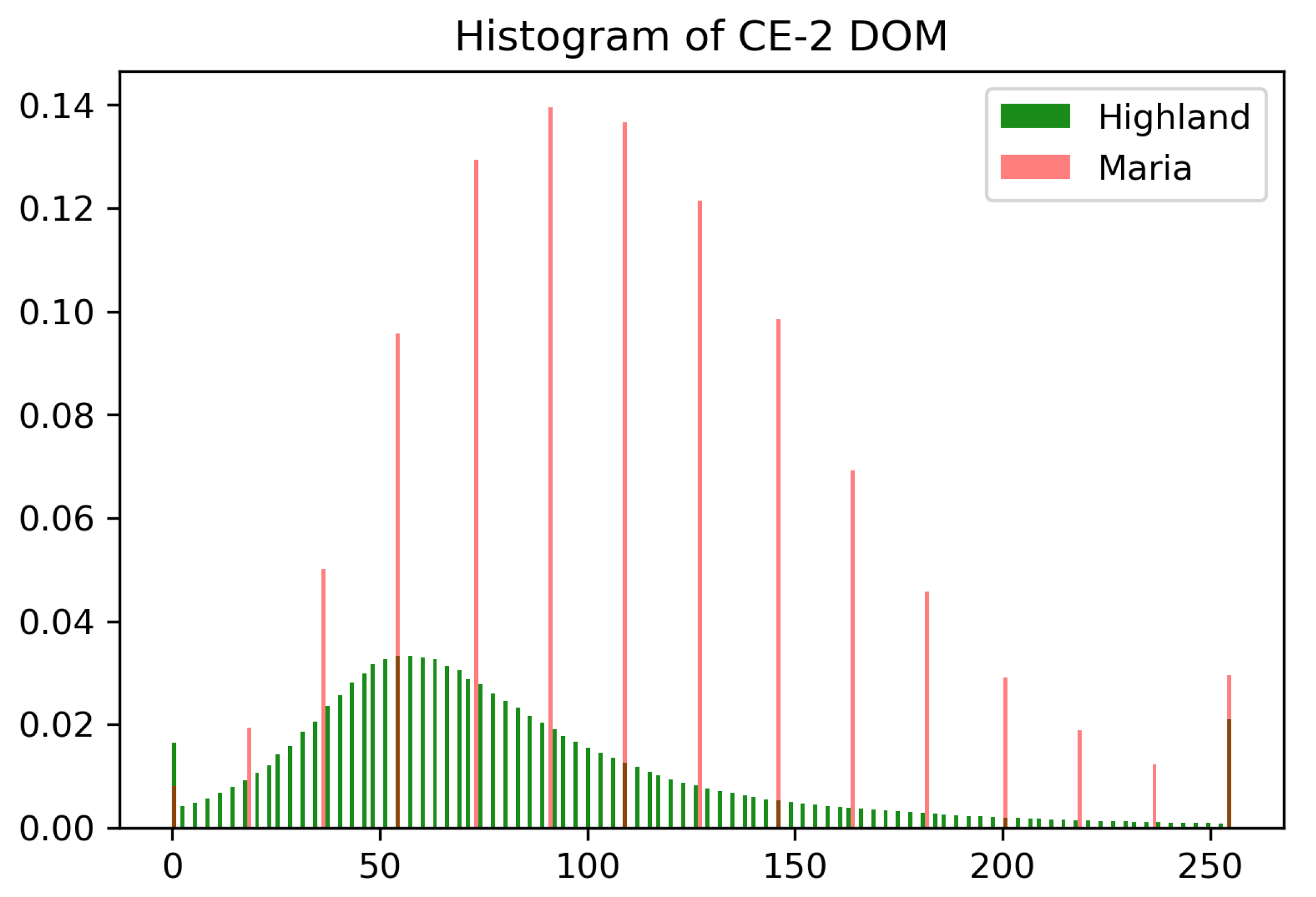
2.3. CE-2 DOM Comparison in Highland and Maria
3. Methods
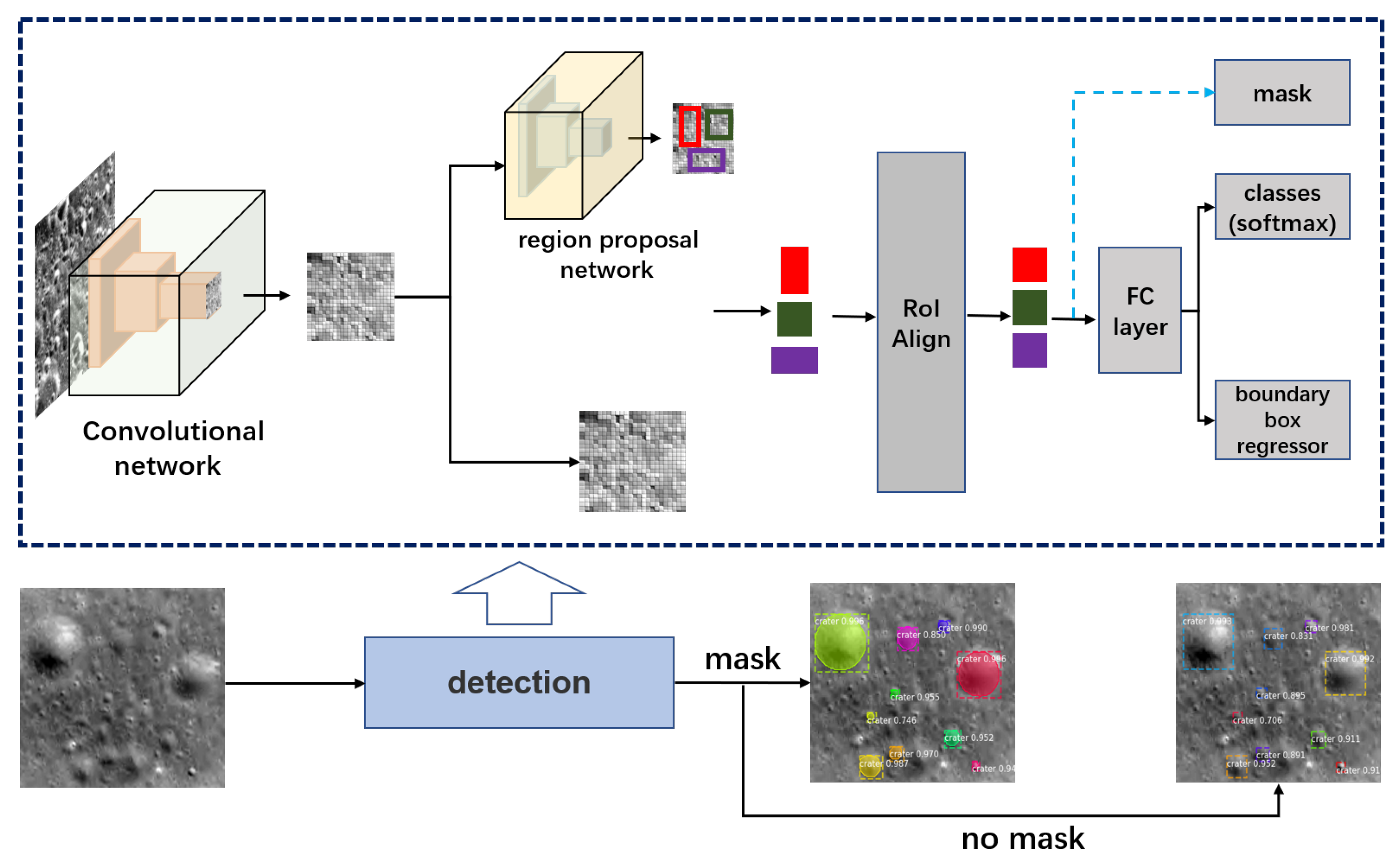
3.1. Mask R-CNN and No-Mask R-CNN Used for Crater Detection
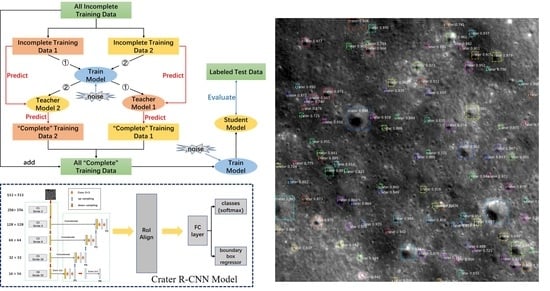
3.2. Crater R-CNN
3.3. Two-Teachers Self-Training with Noise (TTSN)
| Algorithm 1: Two-Teachers Self-training with Noise. |
| Data: Incomplete labeled images divided into and . Step 1: Train the teacher models and , which minimize the cross-entropy loss and smooth L loss on incomplete labeled images: , . Step 2: Use two normal (i.e., non-noisy) teacher models to generate pseudo-labels. The new pseudo-labels with confidence level higher than are selected and fused with manual labels. Here, indicates a confidence of 0.75. Step 3: Train a better student model, , which minimizes the cross-entropy loss and smooth L loss on labeled and pseudo-labeled images. |
3.4. Model Training
4. Results
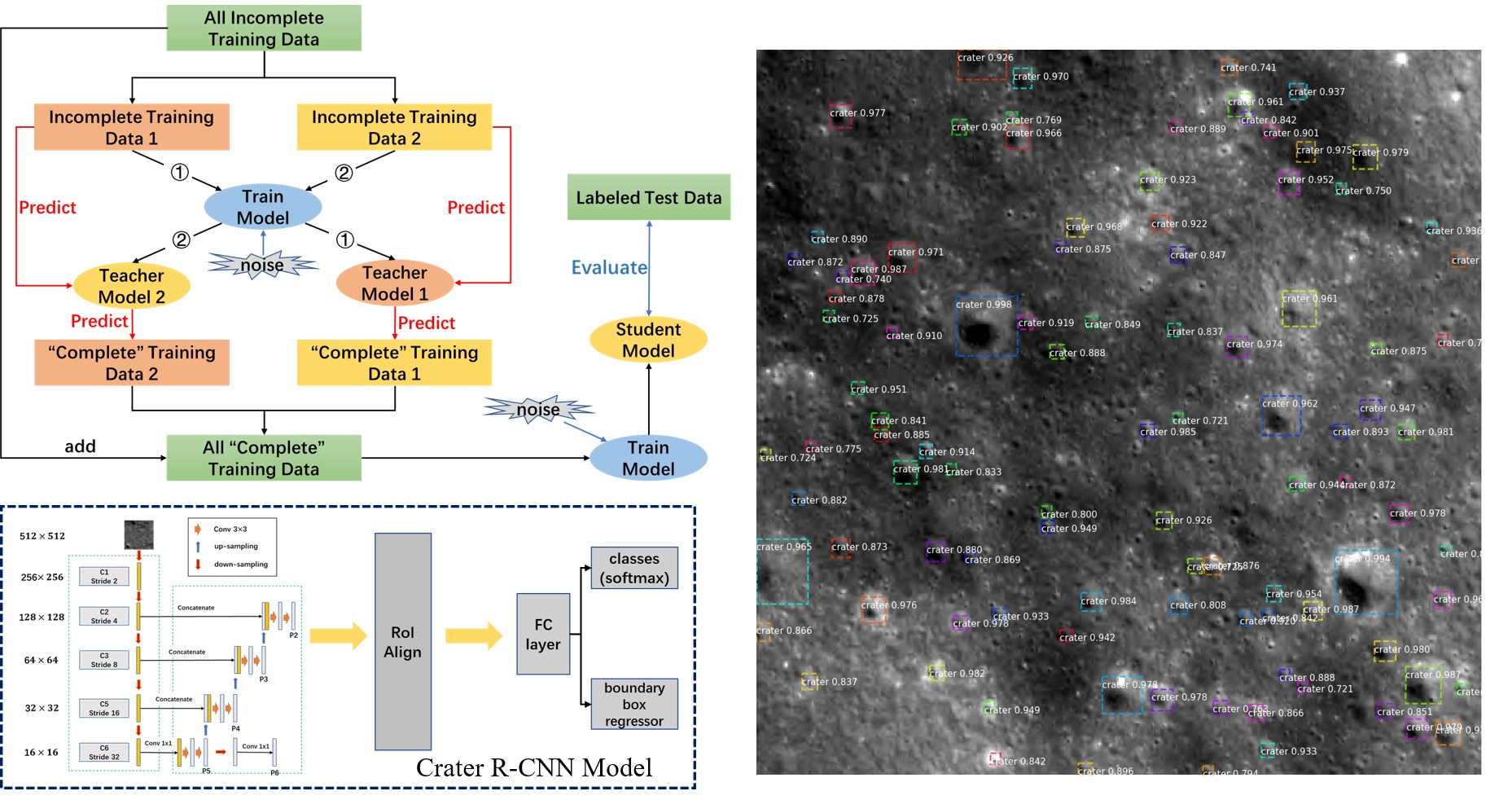
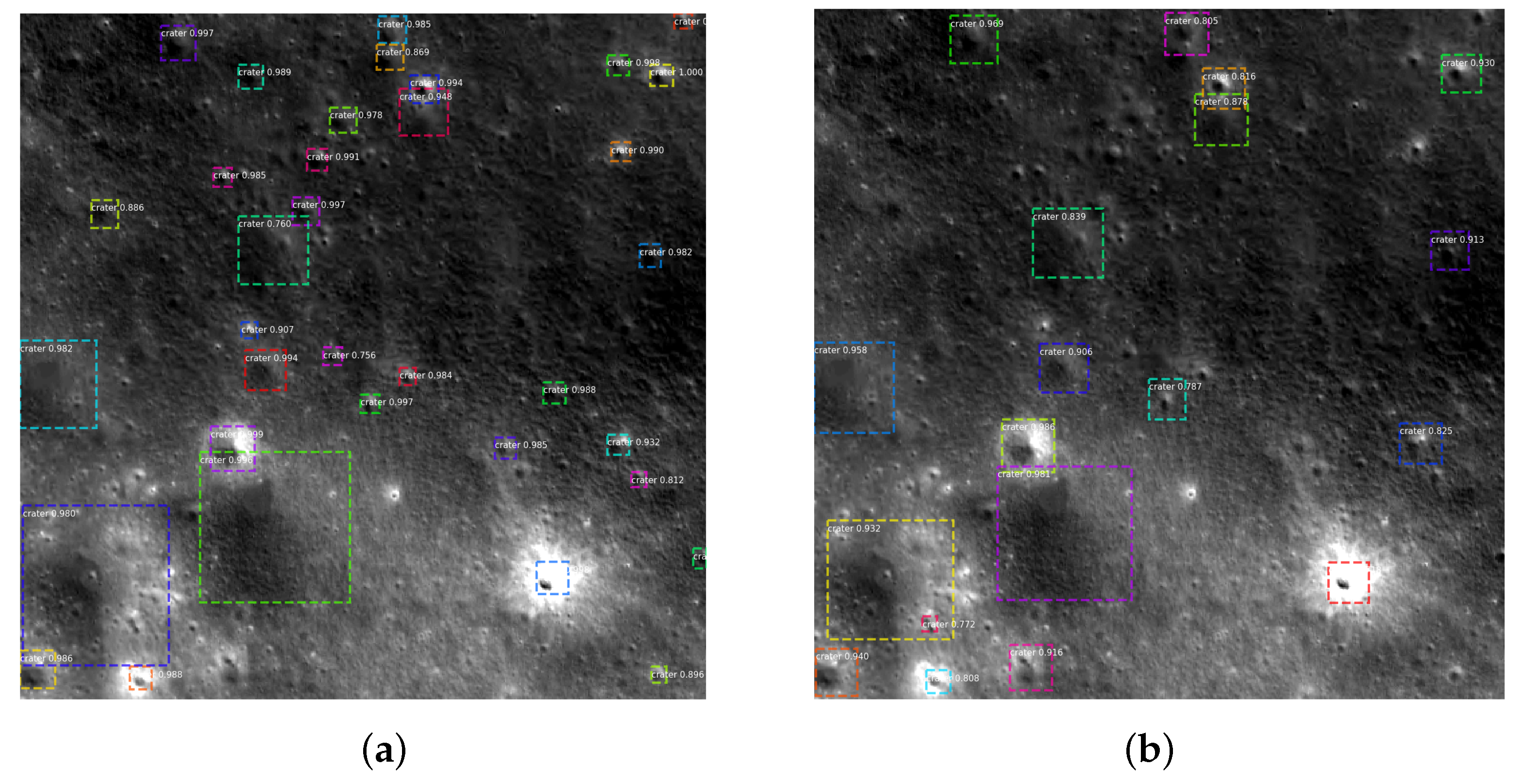
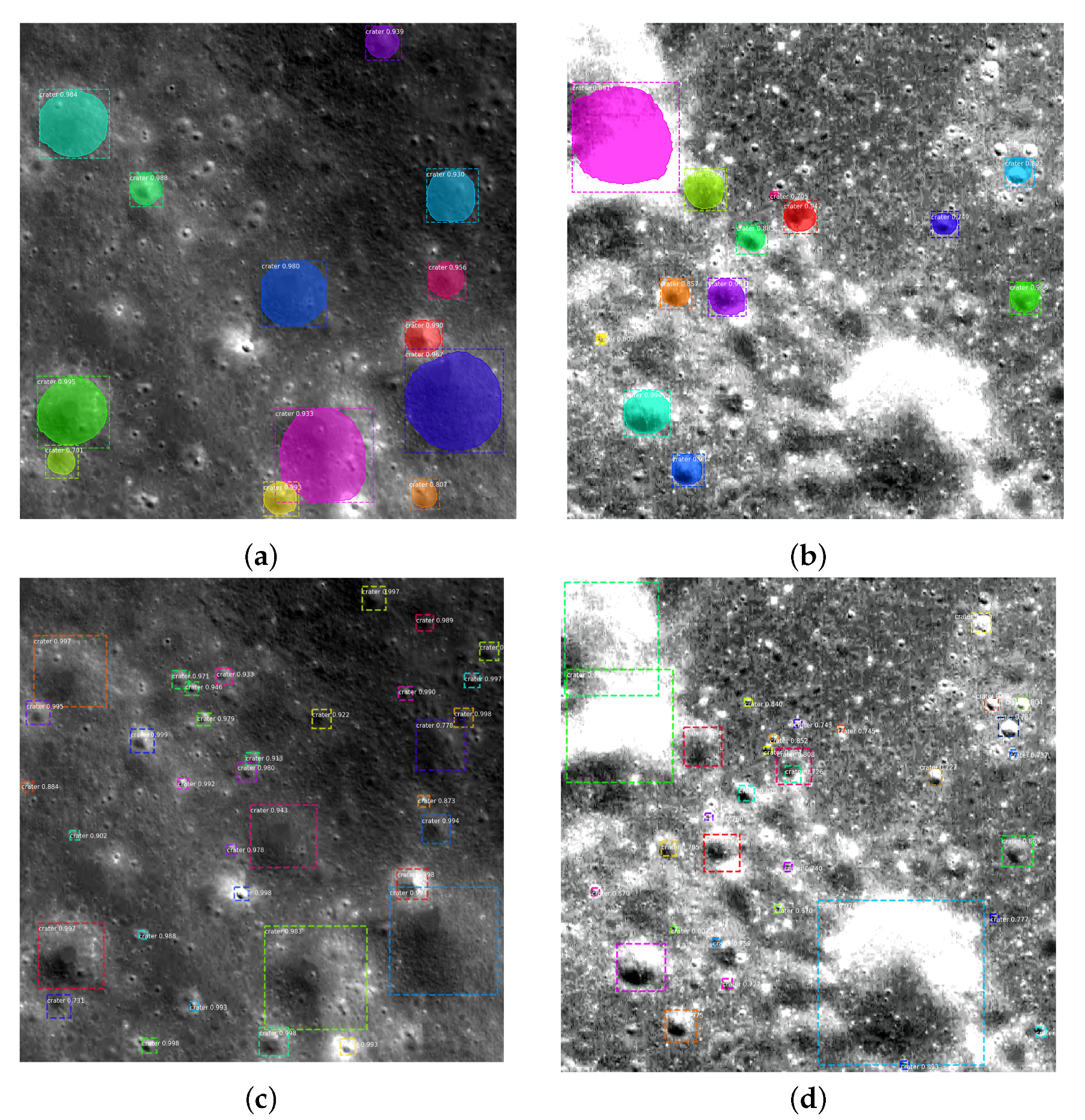
4.1. Crater Detection Post-Processing
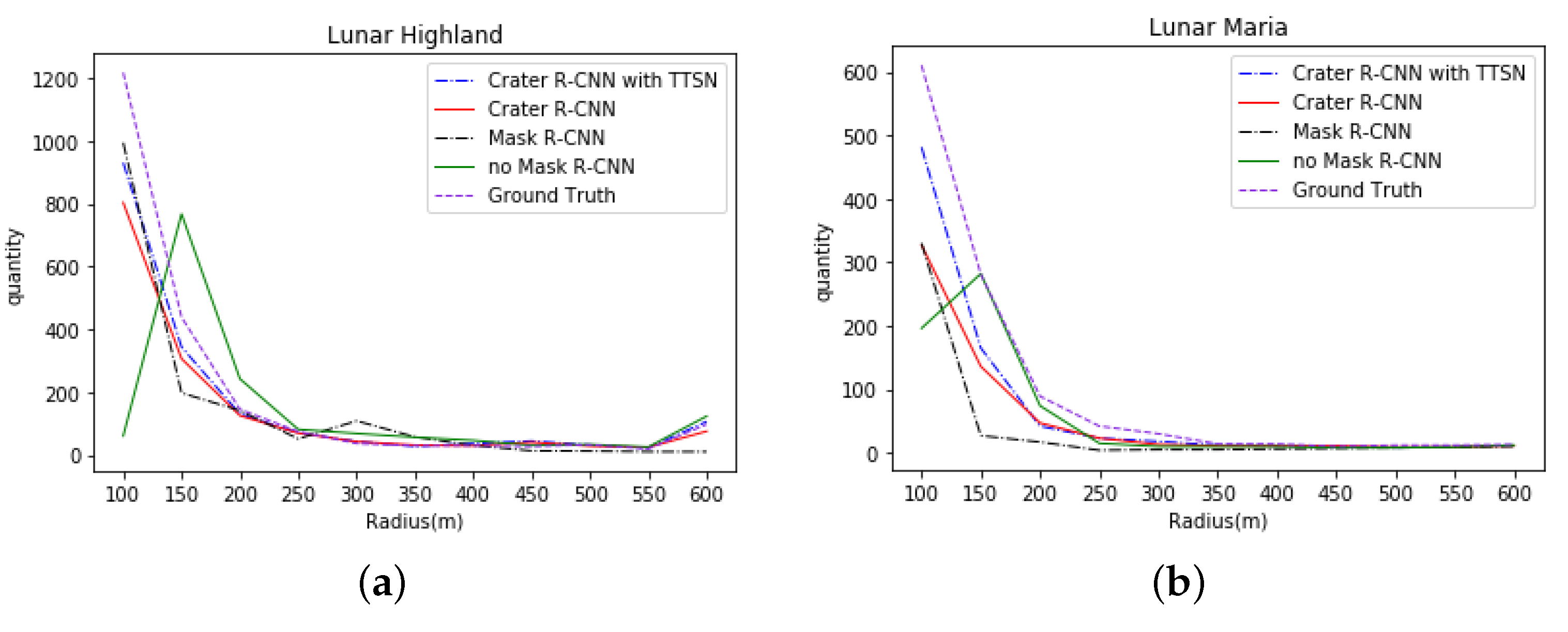
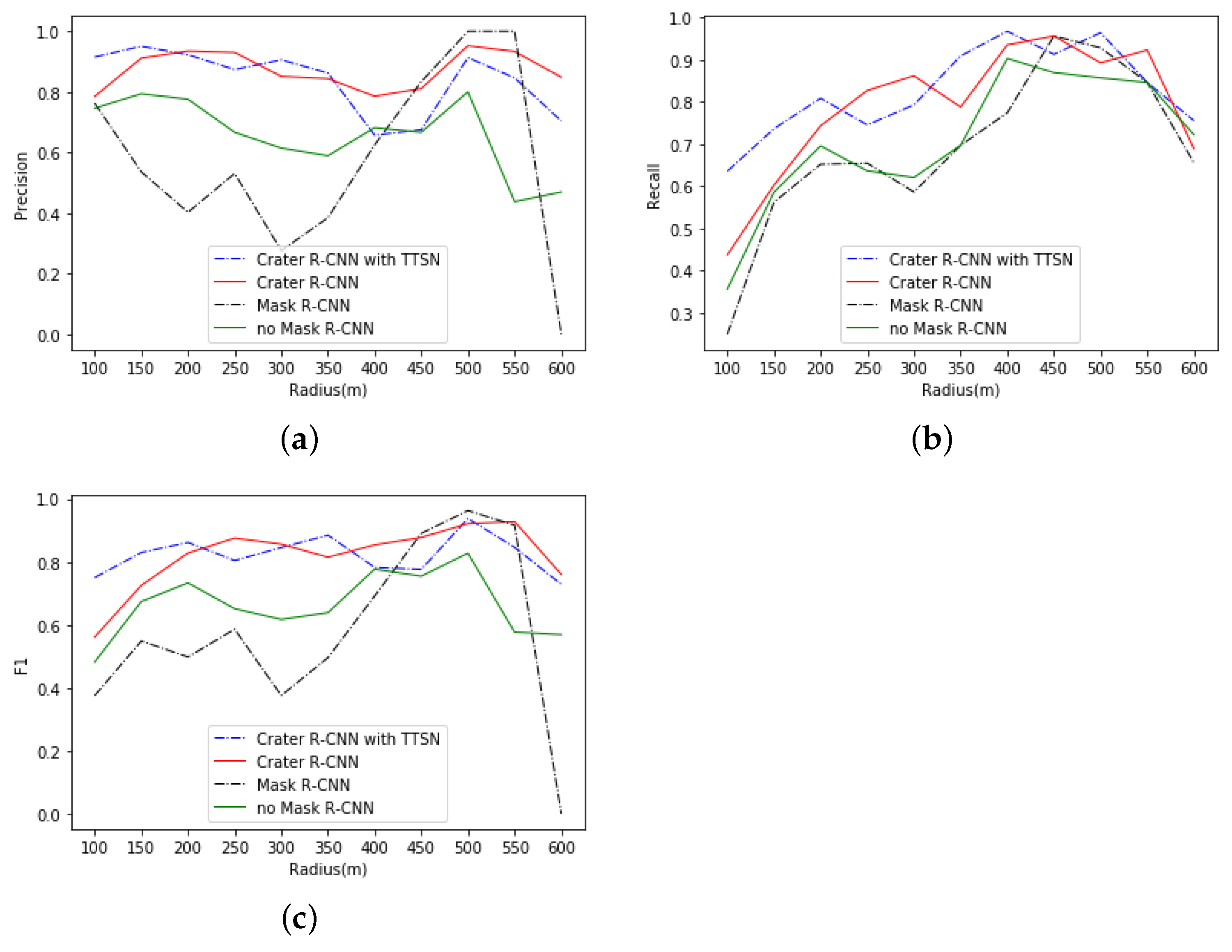
4.2. Accuracy Evaluation
5. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Sample Availability
Abbreviations
| DEM | Digital Elevation Model |
| DOM | Digital Orthophoto Map |
| CE-2 | Chang’E-2 |
| LRO | Lunar Reconnaissance Orbiter |
| CDA | Crater Detection Algorithm |
Appendix A
References
- Luo, L.; Mu, L.; Wang, X.; Li, C.; Ji, W.; Zhao, J.; Cai, H. Global detection of large lunar craters based on the CE-1 digital elevation model. Front. Earth Sci. 2013, 7, 456–464. [Google Scholar] [CrossRef]
- Wilhelms, D.E.; Mccauley, J.F.; Trask, N.J. The Geologic History of the Moon. USA Geol. Surv. Prof. Pap. 1987, 1384, 283–292. [Google Scholar]
- Neukum, G.; Konig, B.; Arkani-Hamed, J. A study of lunar crater size-distributions. Moon 1975, 12, 201–229. [Google Scholar] [CrossRef]
- Craddock, R.A.; Maxwell, T.A.; Howard, A.D. Crater morphometry and modification in the Sinus Sabaeus and Margaritifer Sinus regions of Mars. J. Geophys. Res. Planets 1997, 102, 13321–13340. [Google Scholar] [CrossRef] [Green Version]
- Barlow, N.G.; Bradley, T.L. Martian craters: Correlations of ejecta and interior morphologies with diameter, latitude, and terrain. Icarus 1990, 87, 156–179. [Google Scholar] [CrossRef]
- Downes, L.M. Lunar Orbiter State Estimation Using Neural Network-Based Crater Detection; Massachusetts Institute of Technology: Cambridge, MA, USA, 2020. [Google Scholar]
- Blagg, M.A.; Müller, K.; Wesley, W.H.; Saunder, S.A.; Franz, J. Named Lunar Formations; P. Lund, Humphries: London, UK, 1935. [Google Scholar]
- Arthur, D.W.G.; Agnieray, A.P.; Horvath, R.A.; Wood, C.A.; Chapman, C.R. The System of Lunar Craters, Quadrant I. Commun. Lunar Planet. Lab. 1964, 2, 71–78. [Google Scholar]
- Arthur, D.W.G.; Agnieray, A.P.; Horvath, R.A.; Wood, C.A.; Chapman, C.R. The System of Lunar Craters, Quadrant II. Commun. Lunar Planet. Lab. 1965, 3, 1–2. [Google Scholar]
- Arthur, D.W.G.; Agnieray, A.P.; Pellicori, R.A.; Wood, C.A.; Weller, T. The System of Lunar Craters, Quadrant III. Commun. Lunar Planet. Lab. 1965, 3, 61–62. [Google Scholar]
- Arthur, D.W.G.; Pellicori, R.H.; Wood, C.A. The System of Lunar Craters, Quadrant IV. Commun. Lunar Planet. Lab. 1966, 5, 1–2. [Google Scholar]
- Wood, C.A.; Anderson, L. New morphometric data for fresh lunar craters. In Proceedings of the Lunar and Planetary Science Conference 1978, Houston, TX, USA, 13–17 March 1978; pp. 3669–3689. [Google Scholar]
- Rodionova, Z.F.; Skobeleva, T.P.; Karlov, A.A. A Morphological Catalogue of Lunar Craters. Lunar Planet. Sci. 1985, 16, 706–707. [Google Scholar]
- Head, J.W., 3rd; Fassett, C.I.; Kadish, S.J.; Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Mazarico, E. Global distribution of large lunar craters: Implications for resurfacing and impactor populations. Science 2010, 329, 1504–1507. [Google Scholar] [CrossRef]
- Salamuniccar, G.; Loncaric, S.; Grumpe, A.; Wohler, C. Hybrid method for crater detection based on topography reconstruction from optical images and the new LU78287GT catalogue of Lunar craters. Adv. Space Res. 2014, 53, 1783–1797. [Google Scholar] [CrossRef]
- Öhman, T. LPI Crater Database; Lunar & Planetary Institute: Houston, TX, USA, 2015. [Google Scholar]
- Jiao, W.; Weiming, C.; Chenghu, Z. A Chang’E-1 global catalog of lunar craters. Planet. Space Sci. 2015, 112, 42–45. [Google Scholar]
- Povilaitis, R.Z.; Robinson, M.S.; van der Bogert, C.H.; Hiesinger, H.; Meyer, H.M.; Ostrach, L.R. Crater density differences: Exploring regional resurfacing, secondary crater populations, and crater saturation equilibrium on the moon. Planet. Space Sci. 2018, 162, 41–51. [Google Scholar] [CrossRef]
- Robbins, S.J. A New Global Database of Lunar Impact Craters >1–2 km: 1. Crater Locations and Sizes, Comparisons With Published Databases, and Global Analysis. J. Geophys. Res. 2019, 124, 871–892. [Google Scholar] [CrossRef]
- Delatte, D.M.; Crites, S.T.; Guttenberg, N.; Yairi, T. Automated crater detection algorithms from a machine learning perspective in the convolutional neural network era. Adv. Space Res. 2019, 64, 1615–1628. [Google Scholar] [CrossRef]
- Stepinski, T.F.; Mendenhall, M.P.; Bue, B.D. Machine cataloging of craters on Mars. Icarus 2009, 203, 77–87. [Google Scholar] [CrossRef]
- Urbach, E.R.; Stepinski, T.F. Automatic detection of sub-km craters in high resolution planetary images. Planet. Space Sci. 2009, 57, 880–887. [Google Scholar] [CrossRef]
- Yang, J.; Kang, Z. Bayesian network-based extraction of lunar craters from optical images and DEM data. Adv. Space Res. 2019, 63, 3721–3737. [Google Scholar] [CrossRef]
- Machado, M.; Bandeira, L.; Pina, P. Automatic crater detection in large scale on lunar Maria. In Proceedings of the 46th Lunar and Planetary Science Conference (2015), The Woodlands, TX, USA, 16–20 March 2015. [Google Scholar]
- Di, K.; Li, W.; Yue, Z.; Sun, Y.; Liu, Y. A machine learning approach to crater detection from topographic data. Adv. Space Res. 2014, 54, 2419–2429. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Ari, S.; Mohamad, A.D.; Chenchong, Z.; Alan, J.; Diana, V.; Yevgeni, K.; Tamayo, D.; Menou, K. Lunar crater identification via deep learning. Icarus 2018, 317, 27–38. [Google Scholar]
- Lee, C. Automated crater detection on mars using deep learning. Planet. Space Sci. 2019, 170, 16–28. [Google Scholar] [CrossRef] [Green Version]
- Delatte, D.M.; Crites, S.T.; Guttenberg, N.; Tasker, E.J.; Yairi, T. Segmentation convolutional neural networks for automatic crater detection on mars. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 2944–2957. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Region-based convolutional networks for accurate object detection and segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 142–158. [Google Scholar] [CrossRef] [PubMed]
- Ali-Dib, M.; Menou, K.; Jackson, A.P.; Zhu, C.; Hammond, N. Automated crater shape retrieval using weakly-supervised deep learning. Icarus 2020, 345, 113749. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Liu, J.; Ren, X. The global image of the moon by the Chang’E-1: Data processing and lunar cartography. Sci. China Ser. Earth Sci. 2010, 40, 294–306. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Yan, W.; Zuo, W.; Mu, L.; Zhang, H.; Su, Y.; Wen, W.; Tan, X.; et al. Lunar Global High-precision Terrain Reconstruction Based on Chang’e-2 Stereo Images. Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 485–495. [Google Scholar]
- Zeng, X.; Mu, L. Lunar Spatial Environmental Indicators Dynamically Modeling Based Exploration Area Selection. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 91–96. [Google Scholar]
- Wieczorek, M.A.; Neumann, G.A.; Nimmo, F.; Kiefer, W.S.; Taylor, G.J.; Melosh, H.J.; Phillips, R.J.; Solomon, S.C.; Andrews-Hanna, J.C.; Asmar, S.W. The crust of the Moon as seen by GRAIL. Science 2013, 339, 671–675. [Google Scholar] [CrossRef]
- Wood, J.A.; Dickey, J.S.; Marvin, U.B.; Powell, B.N. Lunar anorthosites and a geophysical model of the moon. In Proceedings of the Apollo 11 Lunar Science Conference, Houston, TX, USA, 5–8 January 1970; Volume 1. [Google Scholar]
- Gao, L.; Liu, J.; Ren, X.; Li, C. Image quality evaluation of panoramic camera steropair based on structural similarity. Laser Optoelectron. Prog. 2014, 51, 071004. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6517–6525. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 21–37. [Google Scholar]
- Han, J.; Zhang, D.; Cheng, G.; Liu, N.; Xu, D. Advanced deep-learning techniques for salient and category-specific object detection: A survey. IEEE Signal Process. Mag. 2018, 35, 84–100. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28, 91–99. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Orhan, A.E.; Pitkow, X. Skip Connections Eliminate Singularities. arXiv 2017, arXiv:1701.09175. [Google Scholar]
- Drozdzal, M.; Vorontsov, E.; Chartrand, G.; Kadoury, S.; Pal, C. The Importance of Skip Connections in Biomedical Image Segmentation; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Xie, Q.; Luong, M.T.; Hovy, E.; Le, Q.V. Self-Training with Noisy Student Improves Image Net Classification. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Author | Count | Minimum Diameter (km) | Methods |
|---|---|---|---|---|
| 1935 | Mary Blagg [7] | 677 | 50 | manual |
| 1965 | D. W. G. Arthur [8,9,10,11] | 17,000 | 3.5 | manual |
| 1978 | Wood [12] | 11,500 | 7 | manual |
| 1985 | Rodionova [13] | 14,923 | 10 | manual |
| 2010 | Head [14] | 5185 | 20 | manual |
| 2013 | Goran Salamunićcar [15] | 78,287 | 8 | CDA |
| 2015 | Öhman [16] | 8716 | 1 | manual |
| 2015 | Wang Jiao [17] | 106,030 | 0.5 | manual |
| 2018 | Povilaitis [18] | 22,746 | 5 | manual |
| 2018 | Robbins [19] | 1,296,879 | 1 | manual |
| Region | Longitude Range () | Latitude Range () |
|---|---|---|
| R1 | −172.51∼−164.99 | −7.01∼0.01 |
| R2 | −178.00∼−164.97 | 62.99∼70.01 |
| R3 | −63.01∼−53.99 | 34.99∼39.40 |
| R4 | 159.98∼170.02 | 43.44∼49.01 |
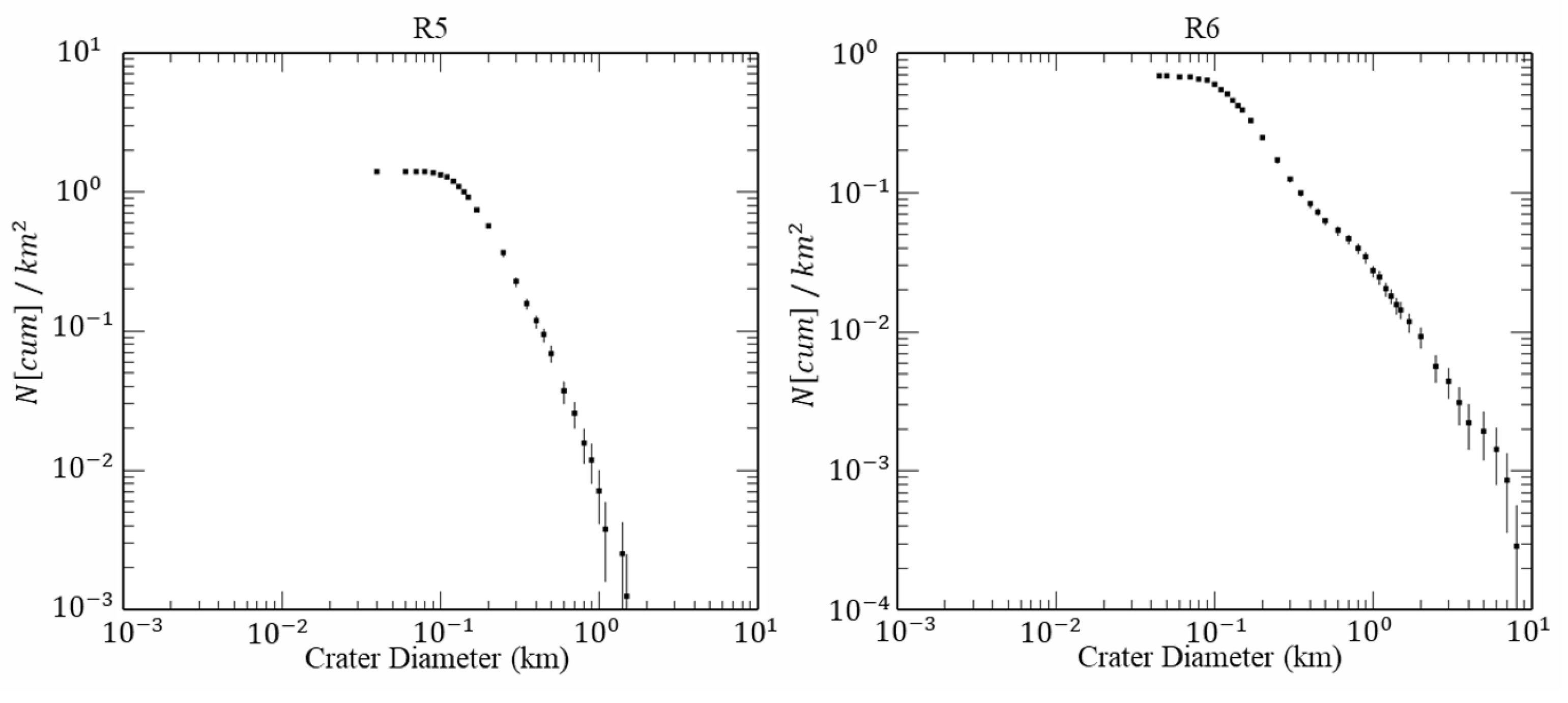
| R5 | −59.44∼−58.60 | 39.41∼41.16 |
| R6 | 165.34∼ 68.91 | 41.99∼43.43 |
| Area | Mean | Variance | Comentropy | EOG |
|---|---|---|---|---|
| Maria | 113.84 | 2924.19 | 5.17 | 624.81 |
| Highland | 80.96 | 2756.20 | 6.91 | 126.14 |
| Type | Model | R | P | F | IoU | |
|---|---|---|---|---|---|---|
| Whole | Mask R-CNN | 0.369 | 0.666 | 0.475 | 0.682 | 0.602 |
| no Mask R-CNN | 0.435 | 0.743 | 0.549 | 0.76 | 1.19 | |
| Crater R-CNN | 0.495 | 0.839 | 0.622 | 0.892 | 0.962 | |
| Crater R-CNN with TTSN | 0.635 | 0.905 | 0.747 | 0.886 | 0.964 | |
| Highland | Mask R-CNN | 0.405 | 0.617 | 0.489 | 0.695 | 0.624 |
| no Mask R-CNN | 0.439 | 0.71 | 0.542 | 0.776 | 1.25 | |
| Crater R-CNN | 0.525 | 0.827 | 0.642 | 0.896 | 1.01 | |
| Crater R-CNN with TTSN | 0.661 | 0.914 | 0.767 | 0.895 | 1.01 | |
| Maria | Mask R-CNN | 0.29 | 0.871 | 0.435 | 0.642 | 0.538 |
| no Mask R-CNN | 0.428 | 0.827 | 0.564 | 0.726 | 0.105 | |
| Crater R-CNN | 0.43 | 0.872 | 0.576 | 0.88 | 0.846 | |
| Crater R-CNN with TTSN | 0.581 | 0.885 | 0.702 | 0.865 | 0.833 |
| Type | Size | R | P | F |
|---|---|---|---|---|
| Whole | Radius < 100 m | 0.549 | 0.915 | 0.687 |
| 100 m ≤ Radius < 200 m | 0.754 | 0.944 | 0.838 | |
| 200 m ≤ Radius | 0.816 | 0.794 | 0.805 | |
| Highland | Radius < 100 m | 0.581 | 0.938 | 0.718 |
| 100 m ≤ Radius < 200 m | 0.779 | 0.96 | 0.86 | |
| 200 m ≤ Radius | 0.832 | 0.774 | 0.802 | |
| Maria | Radius < 100 m | 0.476 | 0.871 | 0.615 |
| 100 m ≤ Radius < 200 m | 0.714 | 0.907 | 0.799 | |
| 200 m ≤ Radius | 0.768 | 0.922 | 0.838 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, S.; Mu, L.; Xian, L.; Zhang, W. Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM. Remote Sens. 2021, 13, 2819. https://doi.org/10.3390/rs13142819
Zang S, Mu L, Xian L, Zhang W. Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM. Remote Sensing. 2021; 13(14):2819. https://doi.org/10.3390/rs13142819
Chicago/Turabian StyleZang, Sudong, Lingli Mu, Lina Xian, and Wei Zhang. 2021. "Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM" Remote Sensing 13, no. 14: 2819. https://doi.org/10.3390/rs13142819
APA StyleZang, S., Mu, L., Xian, L., & Zhang, W. (2021). Semi-Supervised Deep Learning for Lunar Crater Detection Using CE-2 DOM. Remote Sensing, 13(14), 2819. https://doi.org/10.3390/rs13142819