
GAN-GL: Generative Adversarial Networks for Glacial Lake Mapping



Abstract
:
1. Introduction
2. Dataset
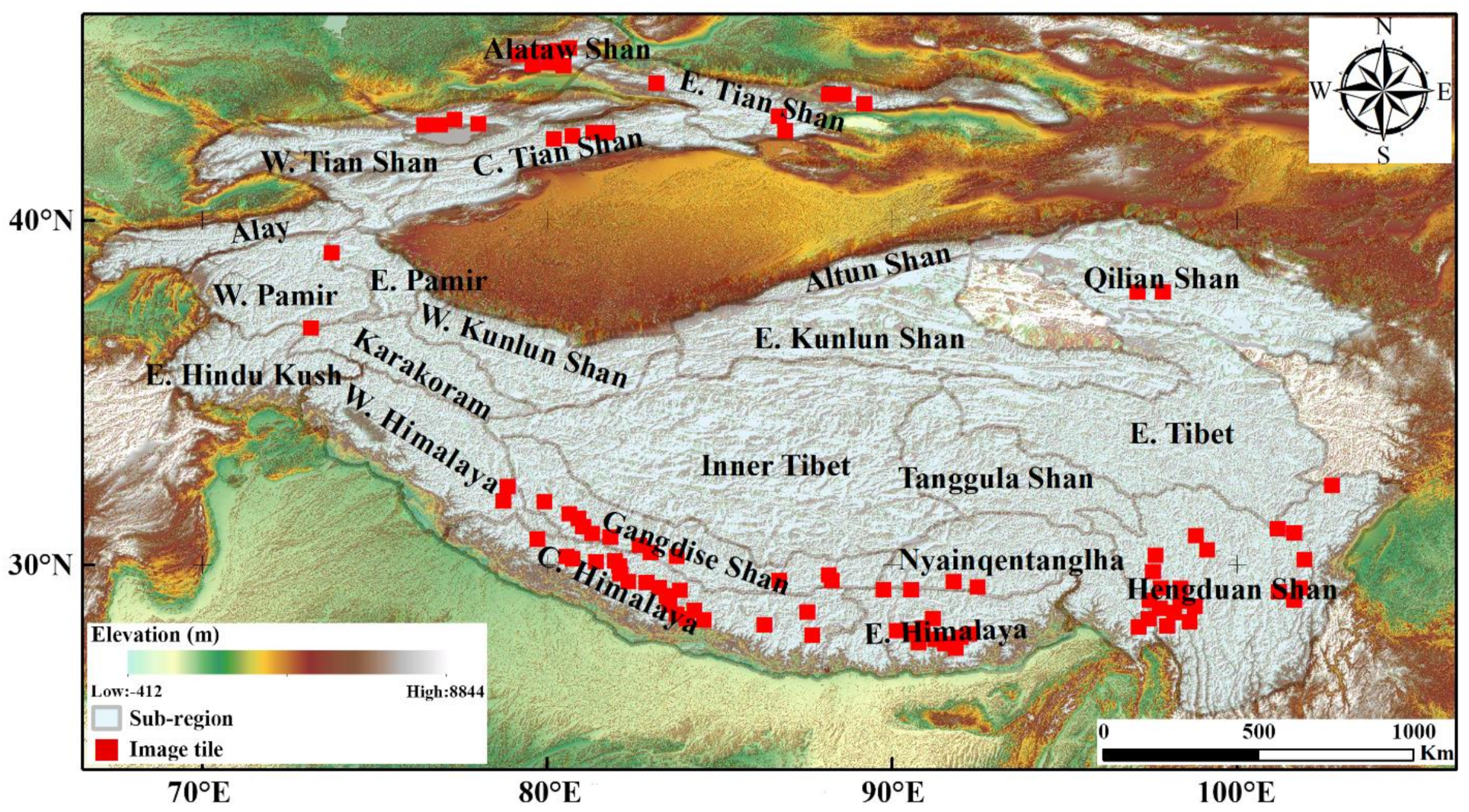
2.1. Collection of Dataset
2.2. Production of the GAN-GL Dataset
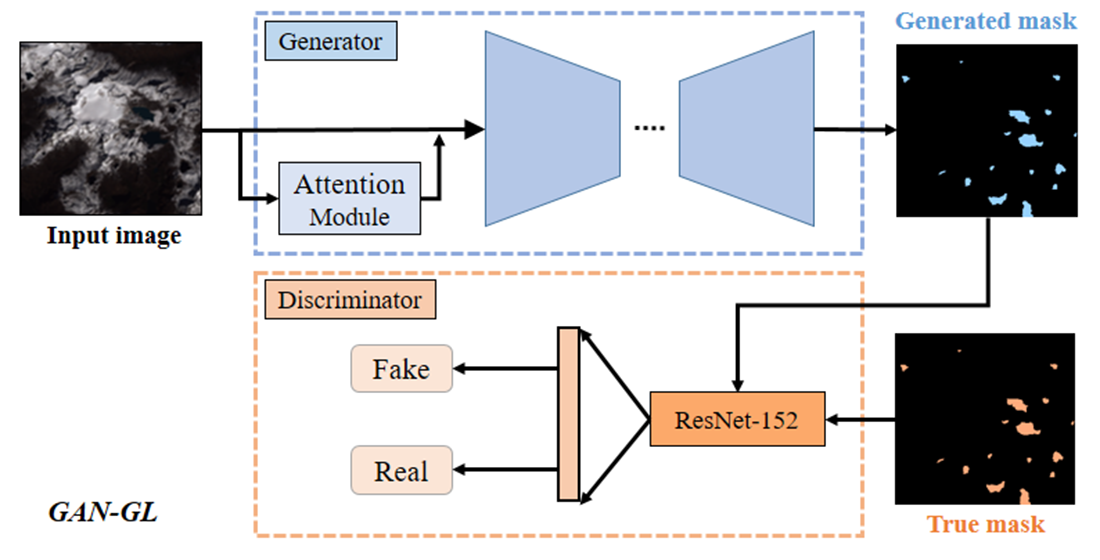
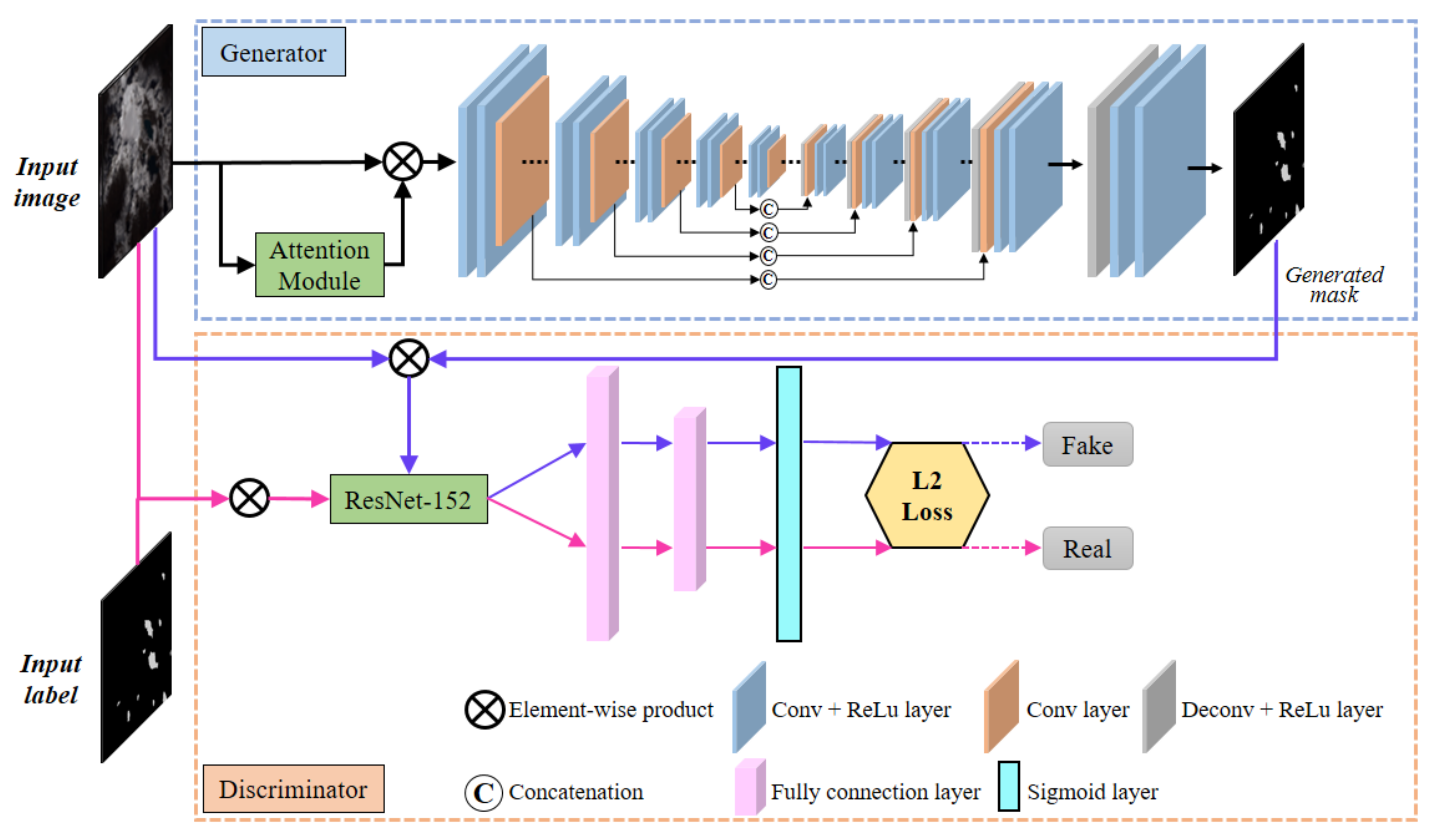
3. Methods
3.1. Generator
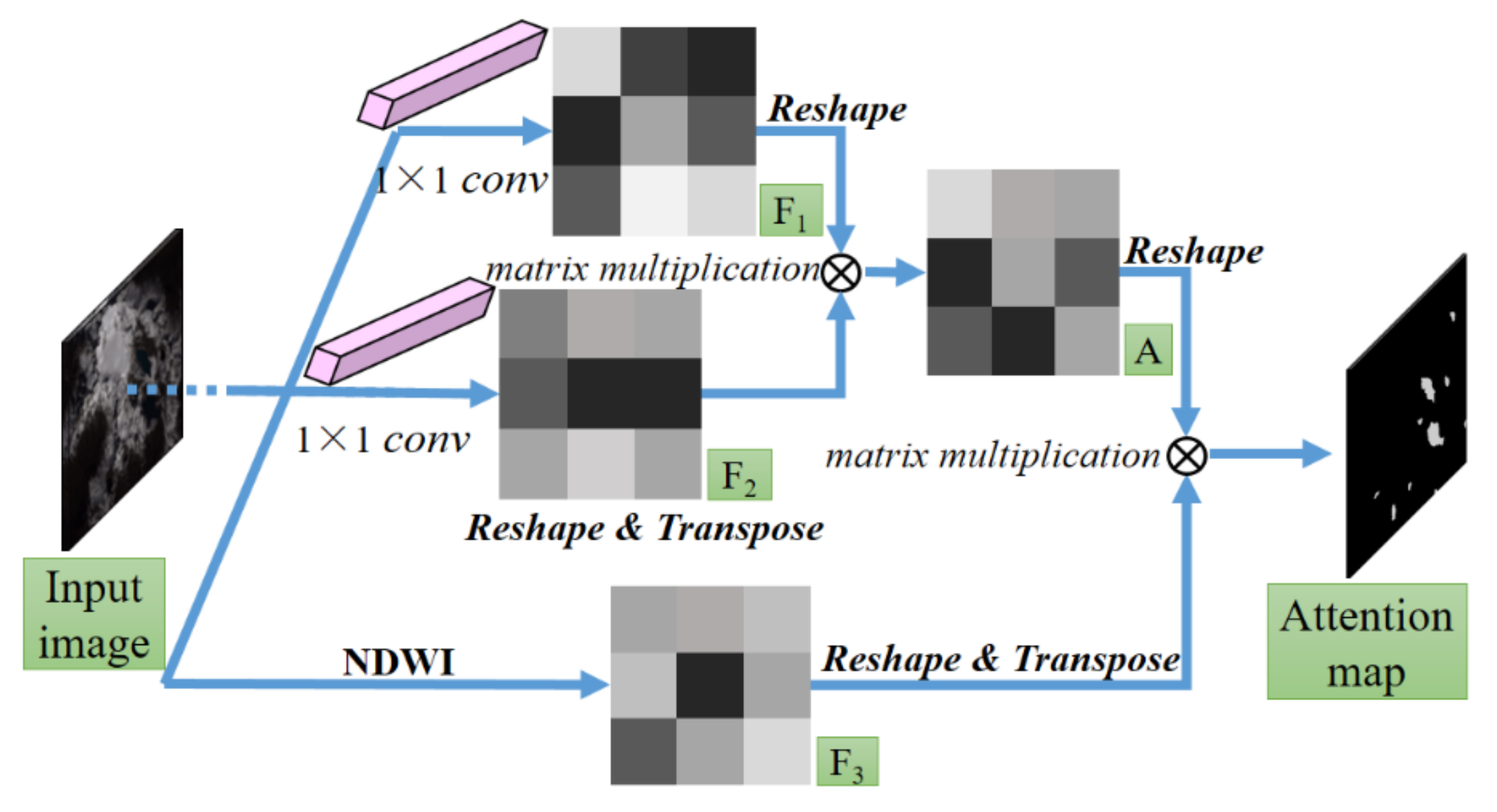
3.1.1. Water Attention Module
3.1.2. Image Segmentation Module
3.2. Discriminator
3.3. Loss Function
4. Results and Discussion
4.1. Implementation Details and Evaluation Metrics
- P = all correctly predicted water pixels/all predicted pixels;
- R = all correctly predicted water pixels/all water pixels;
- OA = all correctly predicted pixels/all pixels;
- F1 = 2 × P × R/(P + R);
- IoU = (predicted water pixels ∩ true water pixels)/(predicted water pixels ∪ true water pixels).
4.2. Ablation Study
- ISeg: The image segmentation module in the generator (see Figure 4); the loss function is L2 loss.
- Attn + ISeg: Combines the water attention module with the image segmentation module; the loss function is L2 loss.
- ISeg + ResNet-50: Combines the image segmentation module in the generator with ResNet-50 in the discriminator; the loss function is the same as in Equation (7).
- ISeg + ResNet-101: Combines the image segmentation module with ResNet-101; the loss function is the same as in Equation (7).
- ISeg + ResNet-152: Combines the image segmentation module with ResNet-152; the loss function is the same as in Equation (7).
- Attn + ISeg + ResNet-50: Combines the water attention and the image segmentation module in the generator, with ResNet-50 in discriminator; the loss function is the same as in Equation (7).
- Attn + ISeg + ResNet-101: Combines the water attention and the image segmentation module in the generator, with ResNet-101 in discriminator; the loss function is the same as in Equation (7).
- Attn + ISeg + ResNet-152: Combines the water attention and the image segmentation module in the generator, with ResNet-152 in discriminator; the loss function is the same as in Equation (7).
4.3. Tests of Different Attention Modules
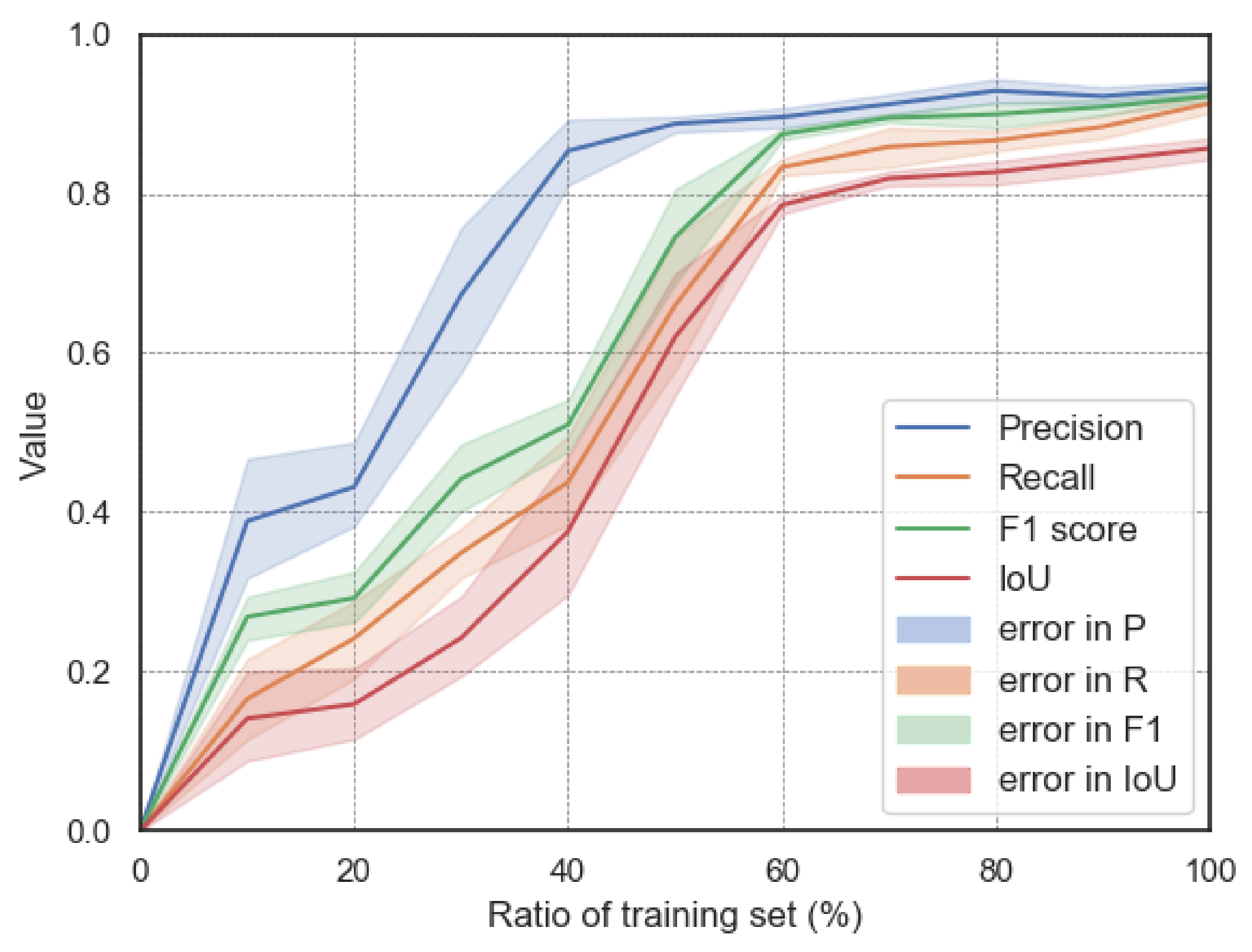
4.4. Impact of Different Training Scales
4.5. Comparison with Other State-of-the-Art Mapping Methods
4.5.1. Experimental Materials
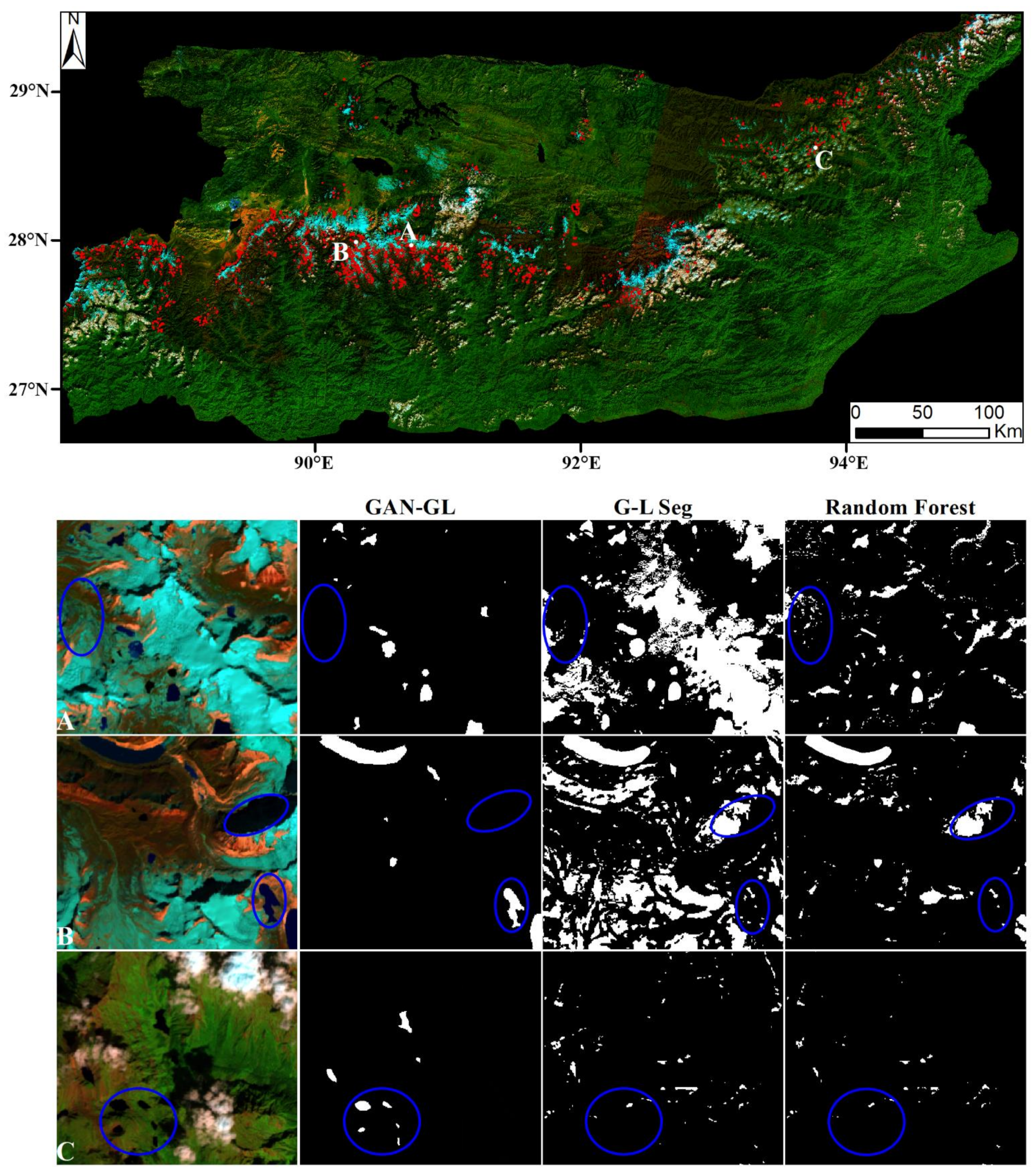
4.5.2. Results and Analysis
5. Discussion
5.1. Exploration of the Improvement of the Effects of our GAN-GL Model
5.2. Performance for Different Lake Sizes
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wangchuk, S.; Bolch, T. Mapping of glacial lakes using Sentinel-1 and Sentinel-2 data and a random forest classifier: Strengths and challenges. Sci. Remote Sens. 2020, 2, 100008. [Google Scholar] [CrossRef]
- Khadka, N.; Zhang, G.Q.; Thakuri, S. Glacial lakes in the Nepal Himalaya: Inventory and decadal dynamics (1977–2017). Remote Sens. 2018, 10, 1913. [Google Scholar] [CrossRef] [Green Version]
- Chand, M.B.; Watanabe, T. Development of supraglacial ponds in the Everest Region, Nepal, between 1989 and 2018. Remote Sens. 2019, 11, 1058. [Google Scholar] [CrossRef] [Green Version]
- Song, C.; Sheng, Y.; Ke, L.; Nie, Y.; Wang, J. Glacial lake evolution in the southeastern Tibetan Plateau and the cause of rapid expansion of proglacial lakes linked to glacial-hydrogeomorphic processes. J. Hydrol. 2016, 540, 504–514. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Guo, X.Y.; Yang, C.D.; Liu, Q.H.; Wei, J.F.; Zhang, Y.; Liu, S.Y.; Zhang, Y.L.; Jiang, Z.L.; Tang, Z.G. Glacial lake inventory of High Mountain Asia (1990–2018) derived from Landsat images. Earth Syst. Sci. Data 2020, 12, 1–23. [Google Scholar] [CrossRef]
- Bohorqueza, P.; Jimenez, P.J.; Carling, P.A. Revisiting the dynamics of catastrophic late Pleistocene glacial-lake drainage, Altai Mountains, central Asia. Earth Sci. Rev. 2019, 197, 102892. [Google Scholar] [CrossRef]
- Prakash, S.; Rai, S.C.; Thakur, P.K.; Emmer, A. Inventory and recently increasing GLOF susceptibility of glacial lakes in Sikkim, Eastern Himalaya. Geomorphology 2017, 295, 39–54. [Google Scholar] [CrossRef]
- Prakash, C.; Nagarajan, R. Glacial lake changes and outburst flood hazard in Chandra basin, North-Western Indian Himalaya. Geomat. Nat. Hazards Risk 2018, 9, 337–355. [Google Scholar] [CrossRef] [Green Version]
- Petro, M.A.; Sabitov, T.Y.; Tomashevskaya, I.G.; Glazirin, G.E.; Chernomorets, S.S.; Savernyuk, E.A.; Tutubalina, O.V.; Patrokov, D.A.; Sokolov, L.S.; Dokukin, M.D.; et al. Glacial lake inventory and lake outburst potential in Uzbekistan. Sci. Total Environ. 2017, 592, 228–242. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Zhang, M.; Guo, H.; Allen, S.; Kargel, J.S.; Haritashya, U.K.; Watson, C.S. Annual 30 m dataset for glacial lakes in High Mountain Asia from 2008 to 2017. Earth Syst. Sci. Data 2021, 13, 741–766. [Google Scholar] [CrossRef]
- Arshad, A.; Rozina, N.; Muhammad, B.I. Altitudinal dynamics of glacial lakes under changing climate in the Hindu Kush, Karakoram, and Himalaya ranges. Geomorphology 2017, 283, 72–79. [Google Scholar] [CrossRef]
- Bazai, N.A.; Cui, P.; Carling, P.A.; Wang, H.; Hassan, J.; Liu, D.; Zhang, G.; Jin, W. Increasing glacial lake outburst flood hazard in response to surge glaciers in the Karakoram. Earth Sci. Rev. 2021, 212, 103432. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Li, J.L.; Sheng, Y.W. An automated scheme for glacial lake dynamics mapping using Landsat imagery and Digital Elevation Models: A Case Study in the Himalayas. Int. J. Remote Sens. 2012, 33, 5194–5213. [Google Scholar] [CrossRef]
- Shen, J.X.; Yang, L.; Chen, X.; Li, J.L.; Peng, Q.; Ju, H. A Method for Object—Oriented Automatic Extraction of Lakes in the Mountain Area from Remote Sensing Image. Remote Sens. Land Resour. 2012, 3, 84–91. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Singh, M.K.; Joshi, P.K.; Snehmani; Singh, S.; Sam, L.; Gupta, R.D.; Kumar, R. A lake detection algorithm (LDA) using Landsat 8 data: A comparative approach in glacial environment. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 150–163. [Google Scholar] [CrossRef]
- Gao, Y.; Wang, W.; Yao, T.; Lu, N.; Lu, A. Hydrological network and classification of lakes on the Third Pole. J. Hydrol. 2018, 560, 582–594. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, F.; Zhang, M. A Systematic Extraction Approach for Mapping Glacial lakes in High Mountain Regions of Asia. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 2788–2799. [Google Scholar] [CrossRef]
- Li, W.; Wang, W.; Gao, X.; Wu, Y.; Wang, X.; Liu, Q. A lake extraction method in mountainous regions based on the integration of object-oriented approach and watershed algorithm. J. Geo-Inf. Sci. 2021, 23, 1272–1285. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. ImageNet classification with deep convolutional neural networks. In Proceedings of the Conference and Workshop on Neural Information Processing System (NIPS), Lake Tahoe, NE, USA, 3–6 December 2012. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Models for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Hynes Convention Center, Boston, MA, USA, 8–10 June 2015. [Google Scholar]
- Goodfellow, I.J.; Abadie, J.P.; Mirza, M.; Xu, B.; Farley, D.W.; Ozair, S.; Courvile, A.; Bengio, Y. Generative Adversarial Nets. arXiv 2014, arXiv:1406.2661. [Google Scholar]
- Qayyum, N.; Ghuffar, S.; Ahmad, H.M.; Yousaf, A.; Shahid, I. Glacial Lakes Mapping Using Multi Satellite PlanetScope Imagery and Deep Learning. ISPRS Int. J. Geo-Inf. 2020, 9, 560. [Google Scholar] [CrossRef]
- Wu, R.; Liu, G.; Zhang, R.; Wang, X.; Li, Y.; Zhang, B.; Cai, J.; Xiang, W. A Deep Learning Method for Mapping Glacial Lakes from the Combined Use of Synthetic-Aperture Radar and Optical Satellite Images. Remote Sens. 2020, 12, 4020. [Google Scholar] [CrossRef]
- Donahue, J.; Simonyan, K. Large Scale Adversarial Representation Learning. arXiv 2019, arXiv:1907.02544. [Google Scholar]
- Liu, L.; Muelly, M.; Deng, J.; Pfister, T.; Li, L. Generative Modeling for Small-Data Object Detection. In Proceedings of the International Conference on Computer Vision (ICCV), COEX Convention Center, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Ledig, C.; Theis, L.; Huszar, F.; Caballero, J.; Cunningham, A.; Acosta, A.; Aitken, A.; Tejani, A.; Totz, J.; Wang, Z.; et al. Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network. arXiv 2016, arXiv:1609.04802. [Google Scholar]
- Kupyn, O.; Budzan, V.; Mykhailych, M.; Mishkin, D.; Matas, J. DeblurGAN: Blind Motion Deblurring Using Conditional Adversarial Networks. arXiv 2017, arXiv:1711.07064. [Google Scholar]
- Minaee, S.; Boykov, Y.; Porikli, F.; Plaza, A.; Kehtarnavaz, N.; Terzopoulos, D. Image Segmentation Using Deep Learning: A Survey. arXiv 2020, arXiv:2001.05566. [Google Scholar] [CrossRef] [PubMed]
- Xue, Y.; Xu, T.; Zhang, H.; Long, R.; Huang, X. SegAN: Adversarial Network with Multi-scale L1 Loss for Medical Image Segmentation. arXiv 2017, arXiv:1706.01805. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Son, J.; Park, S.J.; Jung, K.H. Retinal Vessel Segmentation in Fundoscopic Images with Generative Adversarial Networks. arXiv 2017, arXiv:1706.09318v1. [Google Scholar]
- Zhang, G.Q.; Bolch, T.; Allen, S.; Linsbauer, A.; Chen, W.; Wang, W. Glacial lake evolution and glacier–lake interactions in the Poiqu River basin, central Himalaya, 1964–2017. J. Glaciol. 2019, 65, 347–365. [Google Scholar] [CrossRef] [Green Version]
- Sheng, Y.; Song, C.; Wang, J.; Lyons, E.A.; Knox, B.R.; Cox, J.S.; Gao, F. Representative lake water extent mapping at continental scales using multi-temporal Landsat-8 imagery. Remote Sens. Environ. 2015, 185, 129–141. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Liu, J.; Tian, H.; Li, Y.; Bao, Y.; Fang, Z.; Lu, H. Dual Attention Network for Scene Segmentation. arXiv 2018, arXiv:1809.02983. [Google Scholar]
- Li, H.; Xiong, P.; An, J.; Wang, L. Pyramid Attention Network for Semantic Segmentation. arXiv 2018, arXiv:1805.10180v1. [Google Scholar]
- Li, X.; Zhong, Z.; Wu, J.; Yang, Y.; Liu, Y. Expectation-Maximization Attention Networks for Semantic Segmentation. In Proceedings of the International Conference on Computer Vision (ICCV), COEX Convention Center, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Zhang, M.; Zhao, H.; Chen, F.; Zeng, J. Evaluation of effective spectral features for glacial lake mapping by using Landsat-8 OLI imagery. J. Mt. Sci. 2020, 17, 2707–2723. [Google Scholar] [CrossRef]
- Salimans, T.; Goodfellow, I.; Zaremba, W.; Cheung, W.; Radford, A.; Chen, X. Improved Techniques for Training GANs. arXiv 2016, arXiv:1606.03498. [Google Scholar]
- Xu, H.Q. Modification of normalized difference water index (NDWI) to enhance open water features in remotely sense imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Pei, Y.; Zhang, Y.J.; Zhang, Y. A study on information extraction of water system in semi-arid regions with the Enhanced Water Index (EWI) and GIS based noise remove techniques. Remote Sens. Inf. 2007, 6, 62–67. [Google Scholar]
- Zheng, G.; Bao, A.; Allen, S.; Cánovas, J.A.B.; Yuan, Y.; Jiapaer, G.; Stoffel, M. Numerous unreported glacial lake outburst floods in the Third Pole revealed by high-resolution satellite data and geomorphological evidence. Sci. Bull. 2021, 66, 1270–1273. [Google Scholar] [CrossRef]
- Jiang, H.; Feng, M.; Zhu, Y.Q.; Lu, N.; Huang, J.; Xiao, T. An automated method for extracting rivers and lakes from Landsat imagery. Remote Sens. 2014, 6, 5067–5089. [Google Scholar] [CrossRef] [Green Version]
- Veh, G.; Korup, O.; Roessner, S.; Walz, A. Detecting Himalayan glacial lake outburst floods from 16 Landsat time series. Remote Sens. Environ. 2017, 207, 84–97. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Path/Row | Cloud Cover (%) | Acquisition Data | Sub-Region | Lake Number in the Tile |
|---|---|---|---|---|
| 133/039 | 0.17 | 2 November 2016 | Hengduan Shan | 97 |
| 150/033 | 1.35 | 20 July 2016 | E. Pamir | 9 |
| 146/029 | 1.54 | 25 August 2016 | E. Tianshan | 32 |
| 146/030 | 1.66 | 9 August 2016 | C. Tianshan | 62 |
| 140/039 | 0.18 | 3 November 2016 | Gangdise Shan | 21 |
| 145/038 | 0.34 | 21 October 2016 | Gangdise Shan | 68 |
| 146/038 | 0.92 | 28 October 2016 | W. Himalaya | 36 |
| 149/030 | 0.68 | 15 September 2016 | W. Tianshan | 53 |
| 142/030 | 1.01 | 30 September 2016 | E. Tianshan | 27 |
| 131/039 | 1.38 | 3 October 2016 | Hengduan Shan | 36 |
| 133/040 | 1.56 | 2 November 2016 | Hengduan Shan, Nyainqentanglha | 388 |
| 143/039 | 1.80 | 23 October 2016 | C. Himalaya, Gangdise Shan | 308 |
| 148/029 | 0.88 | 24 September 2016 | Alataw Shan | 197 |
| 144/039 | 2.34 | 14 October 2016 | C. Himalaya | 154 |
| 150/034 | 3.36 | 20 July 2016 | W. Pamir | 31 |
| 147/030 | 1.01 | 10 September 2016 | C. Tianshan | 44 |
| 139/040 | 0.72 | 27 October 2016 | Gangdise Shan | 16 |
| 138/040 | 3.40 | 20 October 2016 | Nyainqentanglha, E. Himalaya | 253 |
| 140/040 | 1.66 | 20 October 2016 | C. Himalaya, Gangdise Shan | 207 |
| 137/040 | 1.07 | 29 October 2016 | Nyainqentanglha, E. Himalaya | 133 |
| 131/037 | 0.01 | 15 July 2016 | Hengduan Shan | 24 |
| 135/034 | 2.95 | 15 October 2016 | Qilian | 17 |
| 142/040 | 1.58 | 1 November 2016 | C. Himalaya | 114 |
| 131/040 | 1.45 | 4 November 2016 | Hengduan Shan | 61 |
| 143/030 | 0.75 | 4 August 2016 | E. Tianshan | 8 |
| 144/038 | 0.50 | 30 October 2016 | Gangdise Shan | 141 |
| 137/041 | 2.59 | 29 October 2016 | E. Himalaya | 240 |
| 145/039 | 1.40 | 6 November 2016 | C. Himalaya | 24 |
| GAN-GL-R | GAN-GL-D | GAN-GL-U | |
|---|---|---|---|
| Number of image patches | 2382 | 1540 | 683 |
| Average number of glacial lakes in each patch | 3.84 | 9.75 | 3.81 |
| Average area of glacial lakes in each patch (pixel) | 329.48 | 1225.39 | 332.54 |
| Average area of each glacial lake (pixel) | 85.80 | 125.68 | 87.28 |
| Dataset | Indicators | ① | ② | ③ | ④ | ⑤ | ⑥ | ⑦ | ⑧ |
|---|---|---|---|---|---|---|---|---|---|
| GAN-GL-R | P (%) | 70.36 | 73.48 | 72.73 | 72.32 | 76.53 | 75.29 | 78.26 | 80.87 |
| R (%) | 71.15 | 72.95 | 80.01 | 87.45 | 85.34 | 84.97 | 86.98 | 90.29 | |
| OA (%) | 99.86 | 99.21 | 99.44 | 99.83 | 99.75 | 99.70 | 99.75 | 99.81 | |
| F1 (%) | 71.25 | 72.72 | 75.69 | 78.67 | 76.80 | 79.34 | 81.89 | 84.83 | |
| IoU (%) | 54.52 | 57.74 | 61.54 | 65.51 | 66.56 | 66.43 | 70.05 | 74.40 | |
| GAN-GL-D | P (%) | 86.69 | 89.14 | 87.01 | 90.11 | 91.85 | 91.29 | 92.93 | 93.34 |
| R (%) | 80.60 | 86.69 | 87.26 | 88.87 | 89.17 | 87.16 | 89.33 | 92.01 | |
| OA (%) | 99.56 | 99.57 | 99.47 | 99.33 | 99.64 | 99.66 | 99.39 | 99.28 | |
| F1 (%) | 83.53 | 87.90 | 86.63 | 88.98 | 89.99 | 87.81 | 90.60 | 92.17 | |
| IoU (%) | 71.73 | 78.41 | 77.20 | 80.97 | 82.63 | 80.29 | 83.64 | 86.34 | |
| GAN-GL-U | P (%) | 63.16 | 66.99 | 66.67 | 73.97 | 74.14 | 74.43 | 75.86 | 77.78 |
| R (%) | 70.59 | 82.52 | 82.61 | 76.32 | 72.88 | 78.02 | 78.57 | 91.30 | |
| OA (%) | 99.20 | 99.78 | 99.88 | 99.85 | 99.83 | 99.89 | 99.89 | 99.89 | |
| F1 (%) | 66.17 | 73.46 | 73.30 | 74.63 | 73.01 | 71.62 | 76.70 | 83.50 | |
| IoU (%) | 50.58 | 58.67 | 58.46 | 60.16 | 58.11 | 60.59 | 62.86 | 72.41 |
| Attention Module | P (%) | R (%) | OA (%) | F1 (%) | IoU (%) |
|---|---|---|---|---|---|
| NDWI | 89.57 | 72.24 | 99.47 | 79.98 | 66.63 |
| MNDWI | 90.35 | 56.57 | 99.15 | 69.58 | 53.35 |
| EWI | 85.29 | 60.58 | 99.13 | 70.84 | 54.84 |
| Attn_NDWI | 93.34 | 92.01 | 99.28 | 92.17 | 86.34 |
| Attn_MNDWI | 91.99 | 86.89 | 99.48 | 88.87 | 80.78 |
| Attn_EWI | 91.19 | 85.29 | 99.76 | 87.64 | 78.80 |
| Method | P (%) | R (%) | OA (%) | F1 (%) | IoU (%) |
|---|---|---|---|---|---|
| GAN-GL | 93.19 | 61.07 | 99.85 | 73.31 | 58.46 |
| G-L Seg (without DEM) | 22.63 | 98.64 | 87.95 | 36.81 | 22.66 |
| Random Forest (without DEM) | 38.83 | 86.62 | 93.68 | 53.63 | 35.84 |
| G-L Seg (with DEM) | 44.81 | 88.47 | 96.53 | 59.49 | 42.34 |
| Random Forest (with DEM) | 57.17 | 74.29 | 96.92 | 64.62 | 47.72 |
| Dataset | Area (km2) | <0.01 * | <0.05 | <0.1 | <0.2 | <0.4 | <0.8 | ≥0.8 |
|---|---|---|---|---|---|---|---|---|
| GAN-GL-R | Count in GAN-GL | 1979 | 1877 | 403 | 229 | 73 | 23 | 5 |
| Proportion (%) | 43.12 | 40.90 | 8.78 | 4.99 | 1.59 | 0.50 | 0.11 | |
| GAN-GL-D | Count in GAN-GL | 3378 | 1828 | 638 | 491 | 268 | 77 | 42 |
| Proportion (%) | 50.26 | 27.19 | 9.49 | 7.31 | 3.99 | 1.15 | 0.61 | |
| GAN-GL-U | Count in GAN-GL | 337 | 297 | 60 | 46 | 14 | 2 | 2 |
| Proportion (%) | 44.46 | 39.18 | 7.92 | 6.07 | 1.85 | 0.26 | 0.26 | |
| Accuracy in GAN-GL-D | P (%) | - | 94.12 | 95.85 | 94.96 | 91.47 | 96.68 | 90.70 |
| R (%) | - | 94.07 | 87.61 | 91.10 | 95.31 | 95.93 | 96.34 | |
| OA (%) | - | 99.69 | 99.62 | 99.55 | 99.58 | 99.63 | 99.52 | |
| F1 (%) | - | 94.09 | 91.54 | 92.99 | 93.35 | 96.30 | 93.43 | |
| IoU (%) | - | 88.05 | 86.19 | 87.44 | 87.99 | 89.32 | 86.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Zhang, M.; Chen, F. GAN-GL: Generative Adversarial Networks for Glacial Lake Mapping. Remote Sens. 2021, 13, 4728. https://doi.org/10.3390/rs13224728
Zhao H, Zhang M, Chen F. GAN-GL: Generative Adversarial Networks for Glacial Lake Mapping. Remote Sensing. 2021; 13(22):4728. https://doi.org/10.3390/rs13224728
Chicago/Turabian StyleZhao, Hang, Meimei Zhang, and Fang Chen. 2021. "GAN-GL: Generative Adversarial Networks for Glacial Lake Mapping" Remote Sensing 13, no. 22: 4728. https://doi.org/10.3390/rs13224728
APA StyleZhao, H., Zhang, M., & Chen, F. (2021). GAN-GL: Generative Adversarial Networks for Glacial Lake Mapping. Remote Sensing, 13(22), 4728. https://doi.org/10.3390/rs13224728