
Optimising the Complex Refractive Index Model for Estimating the Permittivity of Heterogeneous Concrete Models


Abstract
:1. Introduction
2. Methodology
2.1. Time-zero
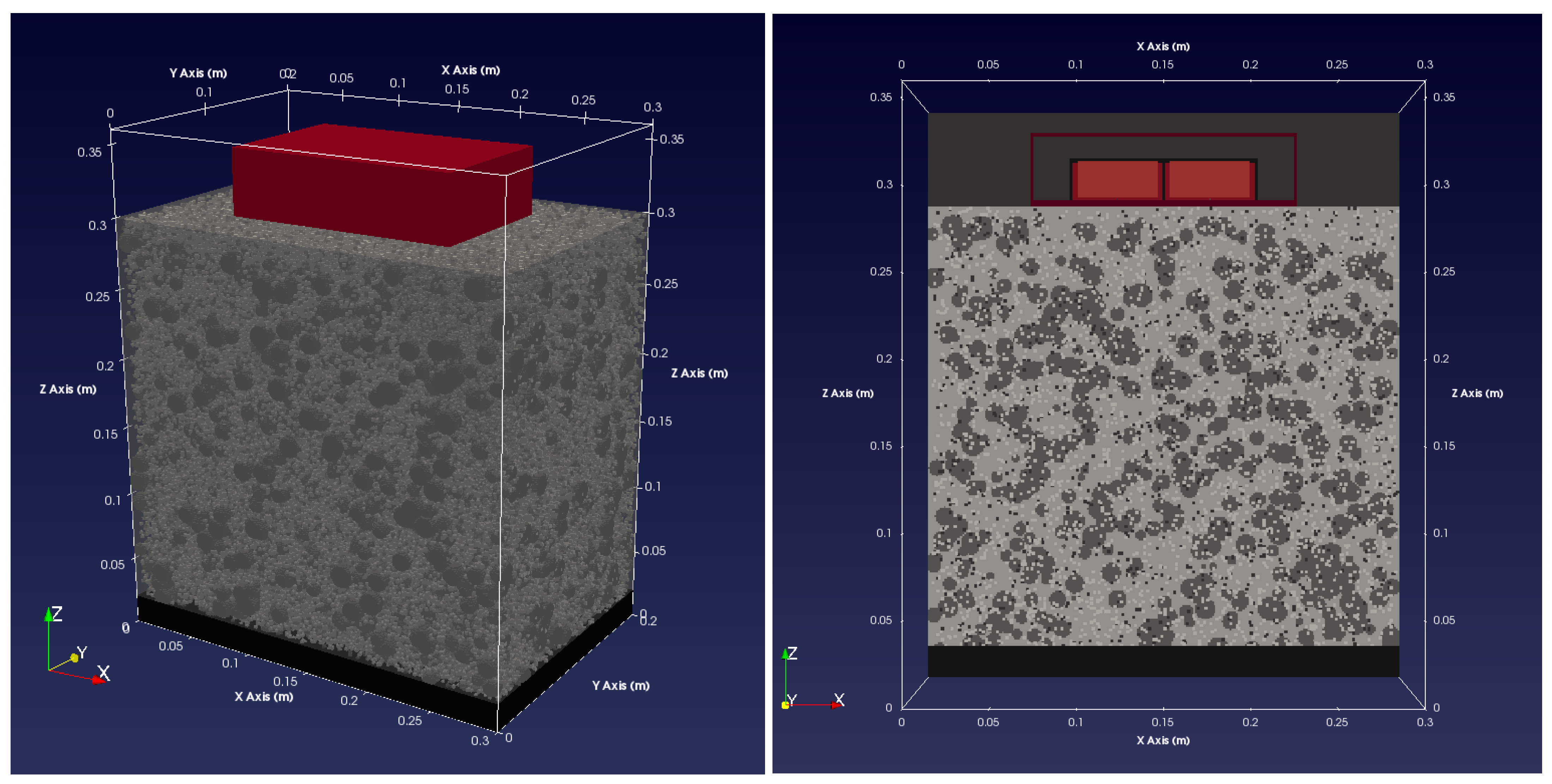
2.2. Concrete Modelling
2.3. Optimisation and Comparison
| = | geometric parameter | |
| = | relative bulk permittivity | |
| = | aggregate volume | |
| = | cement volume | |
| = | air-void volume | |
| = | water volume | |
| = | relative permittivity of aggregate (solid phase–matrix) | |
| = | relative permittivity of cement (solid phase–matrix) | |
| = | relative permittivity of air-void (gaseous phase–air) | |
| = | relative permittivity of water or moisture content (liquid phase–water) |
| = | bulk permittivity | |
| = | dielectric constant of binder | |
| = | dielectric constant of the solid phase (matrix) | |
| = | dielectric constant of the gaseous phase (air) | |
| = | dielectric constant of the liquid phase (water) | |
| = | bulk volume of aggregate | |
| = | volume of air | |
| = | volume of water |
3. Laboratory Experiments
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Daniels, D.J. Ground Penetrating Radar, 2nd ed.; The University of Michigan: London, UK, 2005. [Google Scholar]
- Jol, H.M. Ground pEnetrating Radar Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Annan, A. Ground-penetrating radar. In Near-Surface Geophysics; Society of Exploration Geophysicists: Tulsa, Oklahoma, 2005; pp. 357–438. [Google Scholar]
- El-Mahallawy, M.S.; Hashim, M. Material classification of underground utilities from GPR images using DCT-based SVM approach. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1542–1546. [Google Scholar] [CrossRef]
- Gabryś, M.; Kryszyn, K.; Ortyl, Ł. GPR surveying method as a tool for geodetic verification of GESUT database of utilities in the light of BSI PAS128. Rep. Geod. Geoinform. 2019, 107, 49–59. [Google Scholar]
- Kang, M.S.; Kim, N.; Im, S.B.; Lee, J.J.; An, Y.K. 3D GPR Image-based UcNet for Enhancing Underground Cavity Detectability. Remote Sens. 2019, 11, 2545. [Google Scholar] [CrossRef] [Green Version]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. J. Appl. Geophys. 2000, 43, 119–138. [Google Scholar] [CrossRef]
- Cardarelli, E.; Marrone, C.; Orlando, L. Evaluation of tunnel stability using integrated geophysical methods. J. Appl. Geophys. 2003, 52, 93–102. [Google Scholar] [CrossRef]
- Hugenschmidt, J. Concrete bridge inspection with a mobile GPR system. Constr. Build. Mater. 2002, 16, 147–154. [Google Scholar] [CrossRef]
- Hugenschmidt, J.; Mastrangelo, R. GPR inspection of concrete bridges. Cem. Concr. Compos. 2006, 28, 384–392. [Google Scholar] [CrossRef]
- Diamanti, N.; Annan, A.P.; Redman, J.D. Concrete bridge deck deterioration assessment using ground penetrating radar (GPR). J. Environ. Eng. Geophys. 2017, 22, 121–132. [Google Scholar] [CrossRef]
- Maierhofer, C. Nondestructive evaluation of concrete infrastructure with ground penetrating radar. J. Mater. Civ. Eng. 2003, 15, 287–297. [Google Scholar] [CrossRef]
- Xie, X.; Li, P.; Qin, H.; Liu, L.; Nobes, D.C. GPR identification of voids inside concrete based on the support vector machine algorithm. J. Geophys. Eng. 2013, 10, 034002. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Davidson, N. Realistic modelling of ground penetrating radar for landmine detection using FDTD. In Proceedings of the 15th International Conference on Ground Penetrating Radar, Brussels, Belgium, 30 June–4 July 2014; pp. 954–959. [Google Scholar]
- Chang, C.W.; Lin, C.H.; Lien, H.S. Measurement radius of reinforcing steel bar in concrete using digital image GPR. Constr. Build. Mater. 2009, 23, 1057–1063. [Google Scholar] [CrossRef]
- Mai, T.C.; Razafindratsima, S.; Sbartaï, Z.M.; Demontoux, F.; Bos, F. Non-destructive evaluation of moisture content of wood material at GPR frequency. Constr. Build. Mater. 2015, 77, 213–217. [Google Scholar] [CrossRef]
- Hoegh, K.; Khazanovich, L.; Dai, S.; Yu, T. Evaluating asphalt concrete air void variation via GPR antenna array data. Case Stud. Nondestr. Test. Eval. 2015, 3, 27–33. [Google Scholar] [CrossRef] [Green Version]
- Shang, J.Q. Effects of asphalt pavement properties on complex permittivity. Int. J. Pavement Eng. 2002, 3, 217–226. [Google Scholar] [CrossRef]
- Pérez-Gracia, V.; García, F.G.; Abad, I.R. GPR evaluation of the damage found in the reinforced concrete base of a block of flats: A case study. NDT e Int. 2008, 41, 341–353. [Google Scholar] [CrossRef]
- Klysz, G.; Balayssac, J.; Ferrières, X. Evaluation of dielectric properties of concrete by a numerical FDTD model of a GPR coupled antenna—parametric study. NDT e Int. 2008, 41, 621–631. [Google Scholar] [CrossRef]
- Tsui, F.; Matthews, S. Analytical modelling of the dielectric properties of concrete for subsurface radar applications. Constr. Build. Mater. 1997, 11, 149–161. [Google Scholar] [CrossRef]
- Bourdi, T.; Rhazi, J.E.; Boone, F.; Ballivy, G. Application of Jonscher model for the characterization of the dielectric permittivity of concrete. J. Phys. D Appl. Phys. 2008, 41, 205410. [Google Scholar] [CrossRef]
- Bourdi, T.; Rhazi, J.E.; Boone, F.; Ballivy, G. Modelling dielectric-constant values of concrete: An aid to shielding effectiveness prediction and ground-penetrating radar wave technique interpretation. J. Phys. D Appl. Phys. 2012, 45, 405401. [Google Scholar] [CrossRef]
- Redman, J.D.; Annan, A.P.; Diamanti, N. Measurement of bulk electrical properties using GPR with a variable reflector. J. Environ. Eng. Geophys. 2018, 23, 489–496. [Google Scholar] [CrossRef]
- Böttcher, C.J.F. Theory Electric Polarisation; Elsevier Publishing Company: Amsterdam, The Netherlands, 1952. [Google Scholar]
- Sihvola, A.H. Electromagnetic Mixing Formulas and Applications; IET Digital Library: Padstow, UK, 1999. [Google Scholar]
- Al-Qadi, I.L.; Leng, Z.; Lahouar, S.; Baek, J. In-place hot-mix asphalt density estimation using ground-penetrating radar. Transp. Res. Rec. 2010, 2152, 19–27. [Google Scholar] [CrossRef] [Green Version]
- Birchak, J.R.; Gardner, C.G.; Hipp, J.E.; Victor, J.M. High dielectric constant microwave probes for sensing soil moisture. Proc. IEEE 1974, 62, 93–98. [Google Scholar] [CrossRef]
- Rayleigh, L. LVI. On the influence of obstacles arranged in rectangular order upon the properties of a medium. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1892, 34, 481–502. [Google Scholar] [CrossRef] [Green Version]
- Böttcher, C.J.F.; van Belle, O.C.; Bordewijk, P.; Rip, A. Theor. electr. Polarization; Elsevier Science Ltd: Amsterdam, The Netherlands, 1978. [Google Scholar]
- Brown, W.F.; Franz, W.; Forsbergh, P. Dielectrics/Dielektrika. Handbuch der Physik; Springer: Heidelberg, Germany, 1956. [Google Scholar]
- Wagner, A. Physik, 40, 817 (1913). Arch. Elektroteeh 1914, 3, 83. [Google Scholar]
- Bruggeman, V.D. Berechnung verschiedener physikalischer Konstanten von heterogenen Substanzen. I. Dielektrizitätskonstanten und Leitfähigkeiten der Mischkörper aus isotropen Substanzen. Annalen der physik 1935, 416, 636–664. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef] [Green Version]
- Warren, C.; Giannopoulos, A.; Gray, A.; Giannakis, I.; Patterson, A.; Wetter, L.; Hamrah, A. A CUDA-based GPU engine for gprMax: Open source FDTD electromagnetic simulation software. Comput. Phys. Commun. 2019, 237, 208–218. [Google Scholar] [CrossRef]
- Taflove, A.; Hagness, S.C. Computational Electromagnetics: The Finite-Difference Time-Domain Method, 3rd ed.; Artech House Publishers: London, UK, 2005. [Google Scholar]
- Yee, K. Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar]
- Sadiku, M.N. Numerical Techniques in Electromagnetics; CRC press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Cassidy, N.J. A review of practical numerical modelling methods for the advanced interpretation of ground-penetrating radar in near-surface environments. Near Sur. Geophys. 2007, 5, 5–21. [Google Scholar] [CrossRef]
- Cassidy, N.J.; Millington, T.M. The application of finite-difference time-domain modelling for the assessment of GPR in magnetically lossy materials. J. Appl. Geophys. 2009, 67, 296–308. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A realistic FDTD numerical modeling framework of ground penetrating radar for landmine detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 37–51. [Google Scholar] [CrossRef]
- Lee, K.H.; Chen, C.C.; Teixeira, F.L.; Lee, R. Modeling and investigation of a geometrically complex UWB GPR antenna using FDTD. IEEE Trans. Antennas Propag. 2004, 52, 1983–1991. [Google Scholar] [CrossRef]
- Uduwawala, D. Modeling and investigation of planar parabolic dipoles for GPR applications: A comparison with bow-tie using FDTD. J. Electomagn. Waves Appl. 2006, 20, 227–236. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. Realistic FDTD GPR antenna models optimized using a novel linear/nonlinear Full-Waveform Inversion. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1768–1778. [Google Scholar] [CrossRef]
- Bourgeois, J.M.; Smith, G.S. A fully three-dimensional simulation of a ground-penetrating radar: FDTD theory compared with experiment. IEEE Trans. Geosci. Remote Sens. 1996, 34, 36–44. [Google Scholar] [CrossRef]
- Klysz, G.; Balayssac, J.; Laurens, S.; Ferrieres, X. Numerical FDTD simulation of the direct wave propagation of a GPR coupled antenna. In Proceedings of the Tenth International Conference on Grounds Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; pp. 45–48. [Google Scholar]
- Caratelli, D.; Yarovoy, A.; Ligthart, L.P. Accurate FDTD modelling of resistively-loaded bow-tie antennas for GPR applications. In Proceedings of the 2009 3rd European Conference on Antennas and Propagation, Berlin, Germany, 23–27 March 2009; pp. 2115–2118. [Google Scholar]
- Bourgeois, J.; Smith, G. A complete electromagnetic simulation of a ground penetrating radar for mine detection: Theory and experiment. In Proceedings of the IEEE Antennas and Propagation Society International Symposium 1997, Montreal, QC, Canada, 13–18 July 1997; pp. 986–989. [Google Scholar]
- Radzevicius, S.J.; Chen, C.C.; Peters Jr, L.; Daniels, J.J. Near-field dipole radiation dynamics through FDTD modeling. J. Appl. Geophys. 2003, 52, 75–91. [Google Scholar] [CrossRef]
- Diamanti, N.; Annan, A.P. Characterizing the energy distribution around GPR antennas. J. Appl. Geophys. 2013, 99, 83–90. [Google Scholar] [CrossRef]
- Lampe, B.; Holliger, K. Resistively loaded antennas for ground-penetrating radar: A modeling approach. Geophysics 2005, 70, K23–K32. [Google Scholar] [CrossRef]
- Venkatarayalu, N.V.; Chen, C.C.; Teixeira, F.L.; Lee, R. Numerical modeling of ultrawide-band dielectric horn antennas using FDTD. IEEE Trans. Antennas Propag. 2004, 52, 1318–1323. [Google Scholar] [CrossRef]
- Turk, A.S.; Sahinkaya, D.A.; Sezgin, M.; Nazli, H. Investigation of convenient antenna designs for ultra-wide band GPR systems. In Proceedings of the 2007 4th International Workshop on, Advanced Ground Penetrating Radar, Aula Magna Partenope, Italy, 27–29 June 2007; pp. 192–196. [Google Scholar]
- Warren, C.; Giannopoulos, A. Creating finite-difference time-domain models of commercial ground-penetrating radar antennas using Taguchi’s optimization method. Geophysics 2011, 76, G37–G47. [Google Scholar] [CrossRef]
- Robert, A. Dielectric permittivity of concrete between 50 MHz and 1 GHz and GPR measurements for building materials evaluation. J. Appl. Geophys. 1998, 40, 89–94. [Google Scholar] [CrossRef]
- Al-Saleh, S.A. Analysis of total chloride content in concrete. Case Stu. Constr. Mater. 2015, 3, 78–82. [Google Scholar] [CrossRef] [Green Version]
- Laurens, S.; Balayssac, J.; Rhazi, J.; Klysz, G.; Arliguie, G. Non-destructive evaluation of concrete moisture by GPR: Experimental study and direct modeling. Mater. Struct. 2005, 38, 827–832. [Google Scholar] [CrossRef]
- Wu, Z.; Wong, H.; Buenfeld, N. Transport properties of concrete after drying-wetting regimes to elucidate the effects of moisture content, hysteresis and microcracking. Cem. Concr. Res. 2017, 98, 136–154. [Google Scholar] [CrossRef]
- Shaw, M. The permittivity and conductivity of concretes at ground-penetrating radar frequencies. Adv. Cem. Res. 1998, 10, 187–194. [Google Scholar] [CrossRef]
- Soutsos, M.; Bungey, J.; Millard, S.; Shaw, M.; Patterson, A. Dielectric properties of concrete and their influence on radar testing. NDT e Int. 2001, 34, 419–425. [Google Scholar] [CrossRef]
- Terrasse, G.; Nicolas, J.M.; Trouvé, E.; Drouet, É. Automatic localization of gas pipes from GPR imagery. In Proceedings of the 2016 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 29 August–2 September 2016; pp. 2395–2399. [Google Scholar]
- Daniels, D.J. A review of GPR for landmine detection. Sens. Imaging Int. J. 2006, 7, 90–123. [Google Scholar] [CrossRef]
- Brown, E. Density of asphalt concrete-how much is needed? In Proceedings of the 69th Annual Meeting of the TransportationResearch Board, Washington, DC, USA, 8–9 January 1990.
- Yelf, R. Where is true time zero? In Proceedings of the Tenth International Conference on Grounds Penetrating Radar, Delft, The Netherlands, 21–24 June 2004; pp. 279–282. [Google Scholar]
- Zadhoush, H. Numerical modelling of ground penetrating radar for optimisation of the time-zero adjustment and complex refractive index model. Ph.D. Thesis, The University of Edinburgh, Edinburgh, UK, 2020. [Google Scholar]
- Warren, C.; Giannopoulos, A. Investigation of the directivity of a commercial ground-penetrating radar antenna using a finite-difference time-domain antenna model. In Proceedings of the 2012 14th International Conference on Ground Penetrating Radar (GPR), Shanghai, China, 4–8 June 2012; pp. 226–231. [Google Scholar]
- Ahrens, J.; Geveci, B.; Law, C. Paraview: An end-user tool for large data visualization. Vis. Handb. 2005, 717, 8. [Google Scholar]
- Lachowicz, J.; Rucka, M. A concept of heterogeneous numerical model of concrete for GPR simulations. In Proceedings of the 2017 9th International Workshop on Advanced Ground Penetrating Radar (IWAGPR), Edinburgh, UK, 28–30 June 2017; pp. 1–4. [Google Scholar]
- Grassl, P.; Wong, H.S.; Buenfeld, N.R. Influence of aggregate size and volume fraction on shrinkage induced micro-cracking of concrete and mortar. Cem. Concr. Res. 2010, 40, 85–93. [Google Scholar] [CrossRef] [Green Version]
- Kemper, W.; Rosenau, R. Aggregate stability and size distribution. Methods Soil Anal. Part I Phys. Mineral. Methods 1986, 5, 425–442. [Google Scholar]
- Jury, W.A.; Horton, R. Soil Physics; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Ukaegbu, I.K.; Gamage, K.A.; Aspinall, M.D. Nonintrusive Depth Estimation of Buried Radioactive Wastes Using Ground Penetrating Radar and a Gamma Ray Detector. Remote Sens. 2019, 11, 141. [Google Scholar] [CrossRef] [Green Version]
- Roth, K.; Schulin, R.; Flühler, H.; Attinger, W. Calibration of time domain reflectometry for water content measurement using a composite dielectric approach. Water Resour. Res. 1990, 26, 2267–2273. [Google Scholar] [CrossRef]
- Gardner, C.; Dean, T.; Cooper, J. Soil water content measurement with a high-frequency capacitance sensor. J. Agric. Eng. Res. 1998, 71, 395–403. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-Rayes, M.A. Microwave dielectric behavior of wet soil-Part II: Dielectric mixing models. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 35–46. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric properties of soils in the 0.3-1.3-GHz range. IEEE Trans. Geosci. Remote Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Mixture Percentage | Permittivity () |
|---|---|---|
| Aggregate | 60–75% | 7 |
| Cement | 7–15% | 3 |
| Air | 1–8% | 1 |
| Water | 14–21% | 37.54 [69] |
| Model | Aggregate | Cement | Air-Voids | Moisture Content |
|---|---|---|---|---|
| a | 65% | 15% | 5% | 15% |
| b | 45% | 27% | 11% | 17% |
| c | 60% | 14% | 5% | 21% |
| d | 65% | 10% | 15% | 10% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zadhoush, H.; Giannopoulos, A.; Giannakis, I. Optimising the Complex Refractive Index Model for Estimating the Permittivity of Heterogeneous Concrete Models. Remote Sens. 2021, 13, 723. https://doi.org/10.3390/rs13040723
Zadhoush H, Giannopoulos A, Giannakis I. Optimising the Complex Refractive Index Model for Estimating the Permittivity of Heterogeneous Concrete Models. Remote Sensing. 2021; 13(4):723. https://doi.org/10.3390/rs13040723
Chicago/Turabian StyleZadhoush, Hossain, Antonios Giannopoulos, and Iraklis Giannakis. 2021. "Optimising the Complex Refractive Index Model for Estimating the Permittivity of Heterogeneous Concrete Models" Remote Sensing 13, no. 4: 723. https://doi.org/10.3390/rs13040723
APA StyleZadhoush, H., Giannopoulos, A., & Giannakis, I. (2021). Optimising the Complex Refractive Index Model for Estimating the Permittivity of Heterogeneous Concrete Models. Remote Sensing, 13(4), 723. https://doi.org/10.3390/rs13040723