
CONIC: Contour Optimized Non-Iterative Clustering Superpixel Segmentation

 , ,
, ,
Abstract
:
1. Introduction
1.1. Drawbacks on Clustering Framework
- It utilizes a kind of unstable local K-means in clustering, which is susceptible to cluster initialization [22].
- It merely relies on local color features and makes a fixed trade-off with spatial distances to enforce the shape regularity [19].
- Redundant eigenvalue computations in overlapping local regions are repeated in several iterations [14].
- A split-and-merge heuristic is necessary for region connectivity, which is usually implemented by a connected components algorithm [17].
1.2. Feasible Optimizations for Superpixels
- The clusters converge rapidly since the adjacent pixels are quite similar to the seed in each restricted region [18];
- More homogenous superpixels can be generated because the cluster barycenters avoid falling into local optimum [25];
- The resultant superpixels are more sensitive to image content, owing to the information-aware distribution of seeds [26].
1.3. Contributions of the Proposed Work
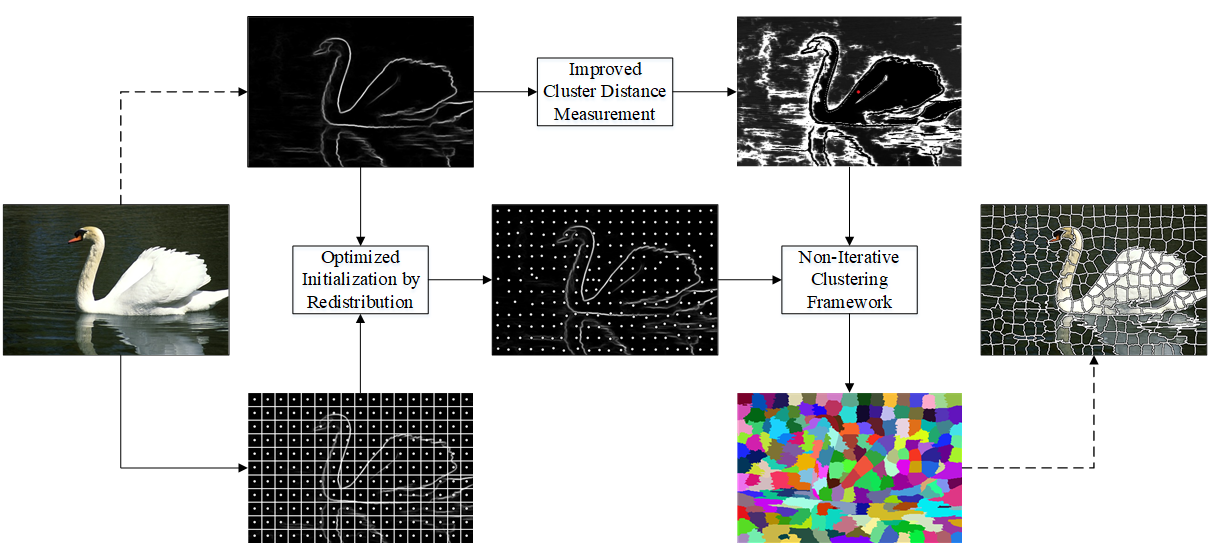
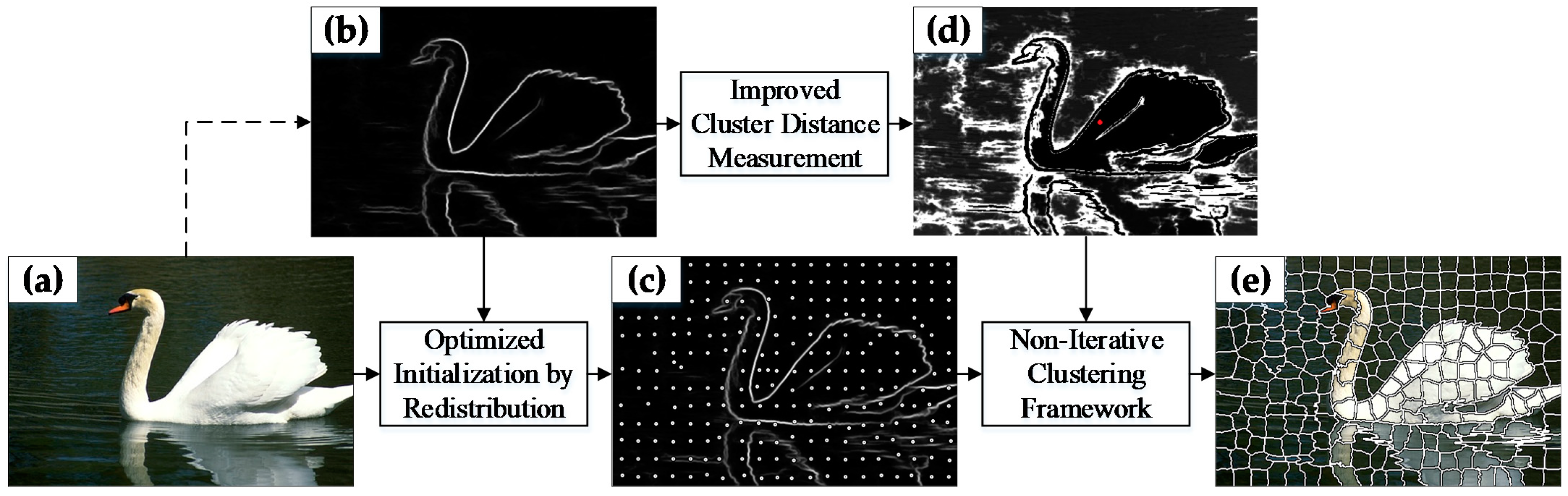
- A new seed initialization strategy is introduced for the NIC framework. It efficiently overcomes the limitations of grid sampling via a global redistribution based on contour prior. As a result, it avoids clustering falling into local optimum, thus further generating more desirable superpixels with exactly the same number required by the user.
- A novel distance measurement is proposed to depict the similarity of a pixel with a cluster more accurately. It takes color information, contour prior and spatial constraint into consideration in a subtle way. Accordingly, the homogeneity and shape regularity of superpixels can be enhanced effectively, without deteriorating other characteristics.
- The proposed CONIC inherits both the efficiency of the NIC framework and the accuracy of contour-based distance measurement. Compared with SNIC, SCALP and other six state-of-the-art methods on a quantitative benchmark, it can generate comparable superpixels with respect to segmentation accuracy and visual effects in a limited computational time.
2. Backgrounds
2.1. Seed-Demand Superpixel Segmentation
2.2. Graph-Based Superpixel Segmentation
2.3. Preliminaries on Non-Iterative Clustering
- Step 1. In an image plane , several pixels are sampled as the incipient seeds as well as the cluster barycenters with a unique label . A small-root priority queue is initialized that always returns the minimum key value while it is not empty.
- Step 2. For each seed , the 4-neighboring unlabeled elements are inspected clockwise. The distance is individually computed as the key value for each element before it is pushed on .
- Step 3. In the priority queue , the top-most element is popped and assigned a label identical to its seed that previously inspects , i.e.,
- Step 4. In the next loop, becomes the new seed of cluster , and the 4-neighboring unlabeled elements of are processed similar to in Step 2.
- Step 5. Repeat Step 2 to 4 until is empty.
3. Methods
3.1. Optimized Initialization by Redistribution
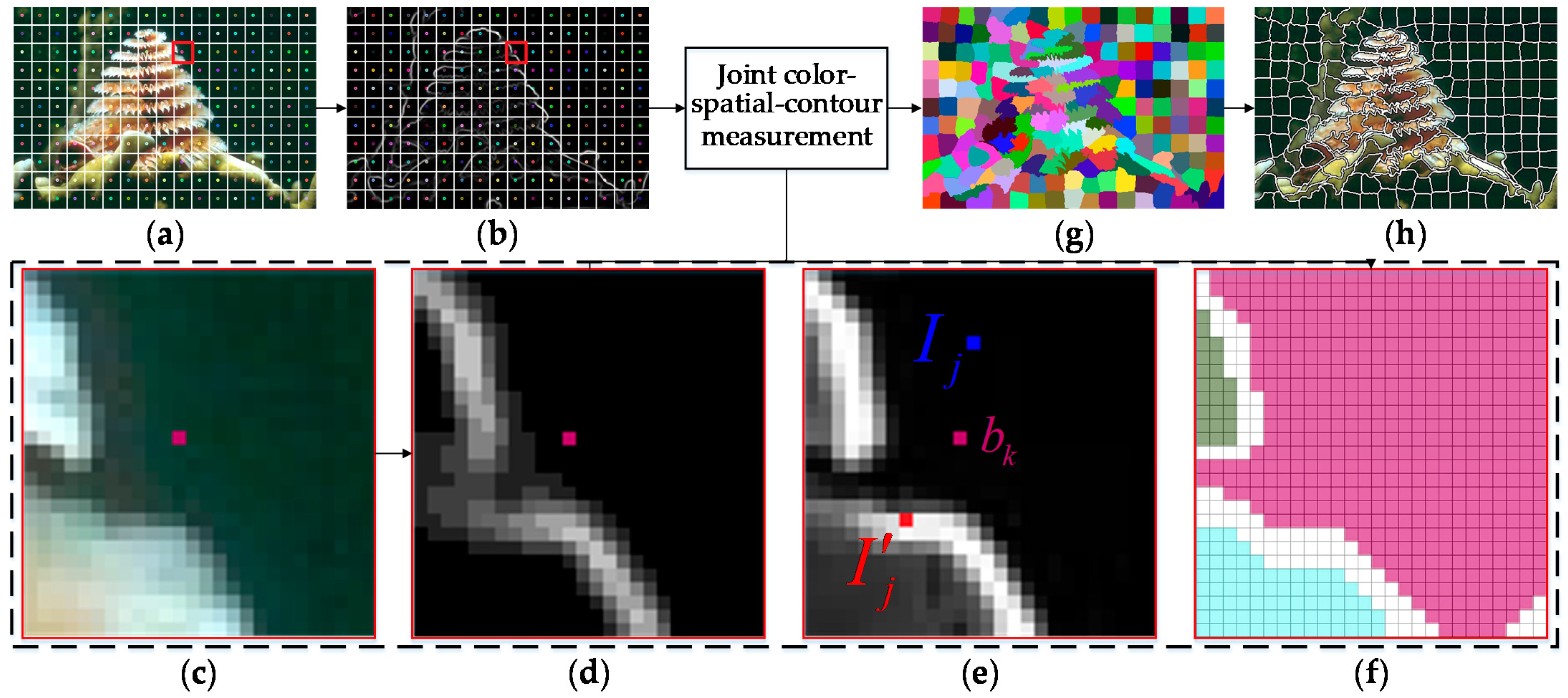
3.2. Improved Cluster Distance Measurement
3.3. Synergetic CONIC Framework
- The optimized initialization strategy helps the improved distance measurement work better on the NIC, since all clusters should evolve from a flat location in the latter strategy. Otherwise, there would be some orphaned clusters with very small sizes.
- The optimized initialization strategy could reflect the distribution of image content, which facilitates the improved distance measurement dealing with some complex scenes, such as small objects and weak boundaries.
- The combination shows an immediate effect on improving the segmentation quality, and the parameters lead to very similar performance within a wide adjustment range. Therefore, it is easy to set a proper value for each parameter in these two strategies.
- The combination makes for a robust and rapid convergence of each cluster in the NIC, without concerning the boundary pixels. Potentially, these elements can be inspected only once which avoids calculating feature distance repeatedly.
| Algorithm 1: CONIC superpixel segmentation framework |
| Input: the Lab image , the expected superpixel number , the normalized contour map |
| Output: the label map of /* Initialization */ initialize cluster seeds by grid sampling at a regular step . initialize a priority queue with a small root. set label for . /* Seeds redistribution */ move to the lowest positions of contour intensity within a range of . create a region adjacency graph to depict the correlations of the perturbed seeds . while the number of nodes in is not equal to do if then calculate the midpoint of and corresponding to the minimum . move to the lowest positions. update that replace and with . else if then calculate the midpoint of and corresponding to the maximum . move to the lowest positions. update that incorporate . end if end while /* Joint assignment and updating */ for each cluster barycenter in do create a vector node . push the node on that adopts the distance as the key value for sorting. end for while is not empty do pop the top-most node corresponding to from . if is not labeled before then assign the label of to . update the corresponding cluster by Equation (4). for each 4-neighboring element of do if is not labeled before then push the node on . end if end for end if end while return the label map of |
4. Results and Discussion
4.1. Experimental Setup
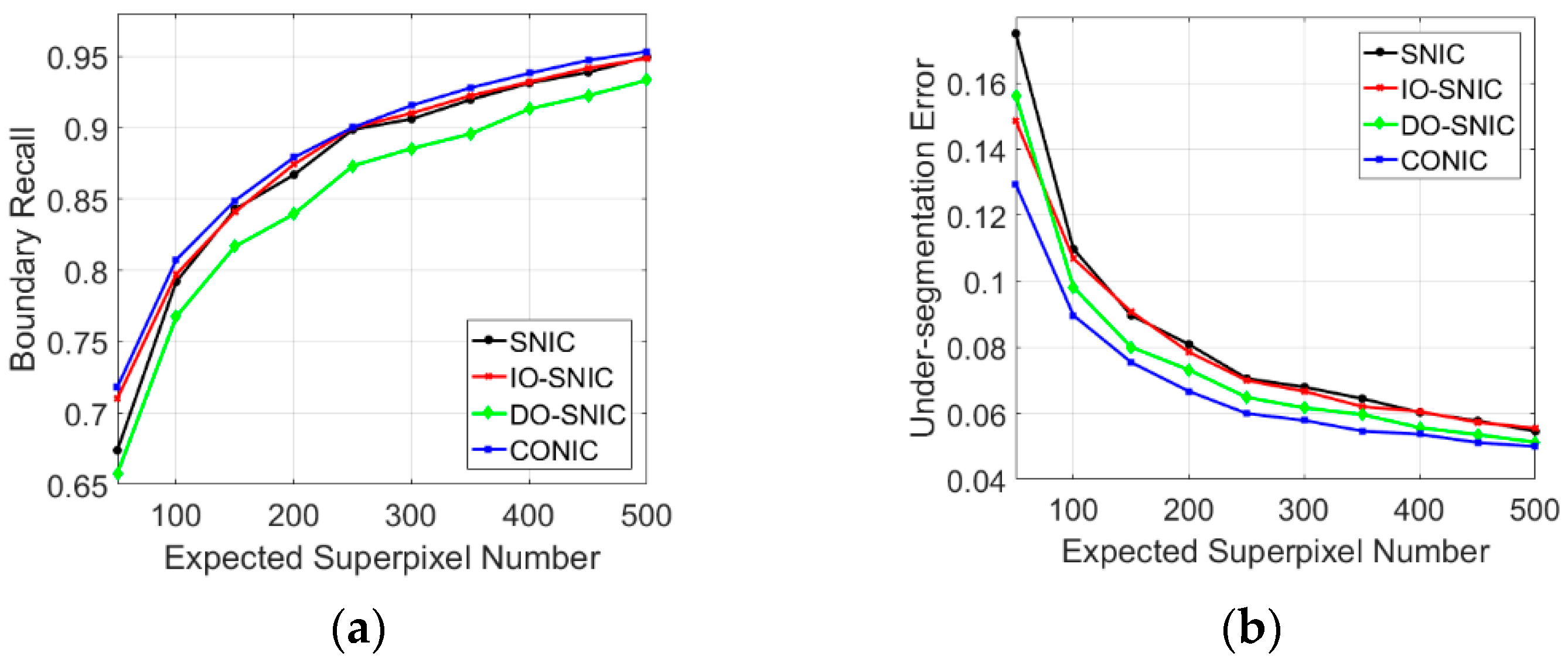
- Boundary Recall (BR). BR is the most commonly used metric to assess boundary adherence given ground truth. Mathematically, it is the ratio of ground truth boundaries covered by superpixel boundaries (higher is better).
- Under-segmentation Error (UE). UE utilizes segmentation regions instead of boundaries to penalize superpixels that overlap with multiple objects (lower is better).
- Achievable Segmentation Accuracy (ASA). ASA quantifies the accuracy achievable by following steps. A higher ASA value indicates the performance of superpixels in subsequent is unaffected (higher is better).
- Compactness (CO). CO refers to the area covered by individual superpixels that compares the area of each superpixel with the area of a circle (the most compact 2-dimensional shape) with the same perimeter (higher is better).
4.2. Algorithm Analysis
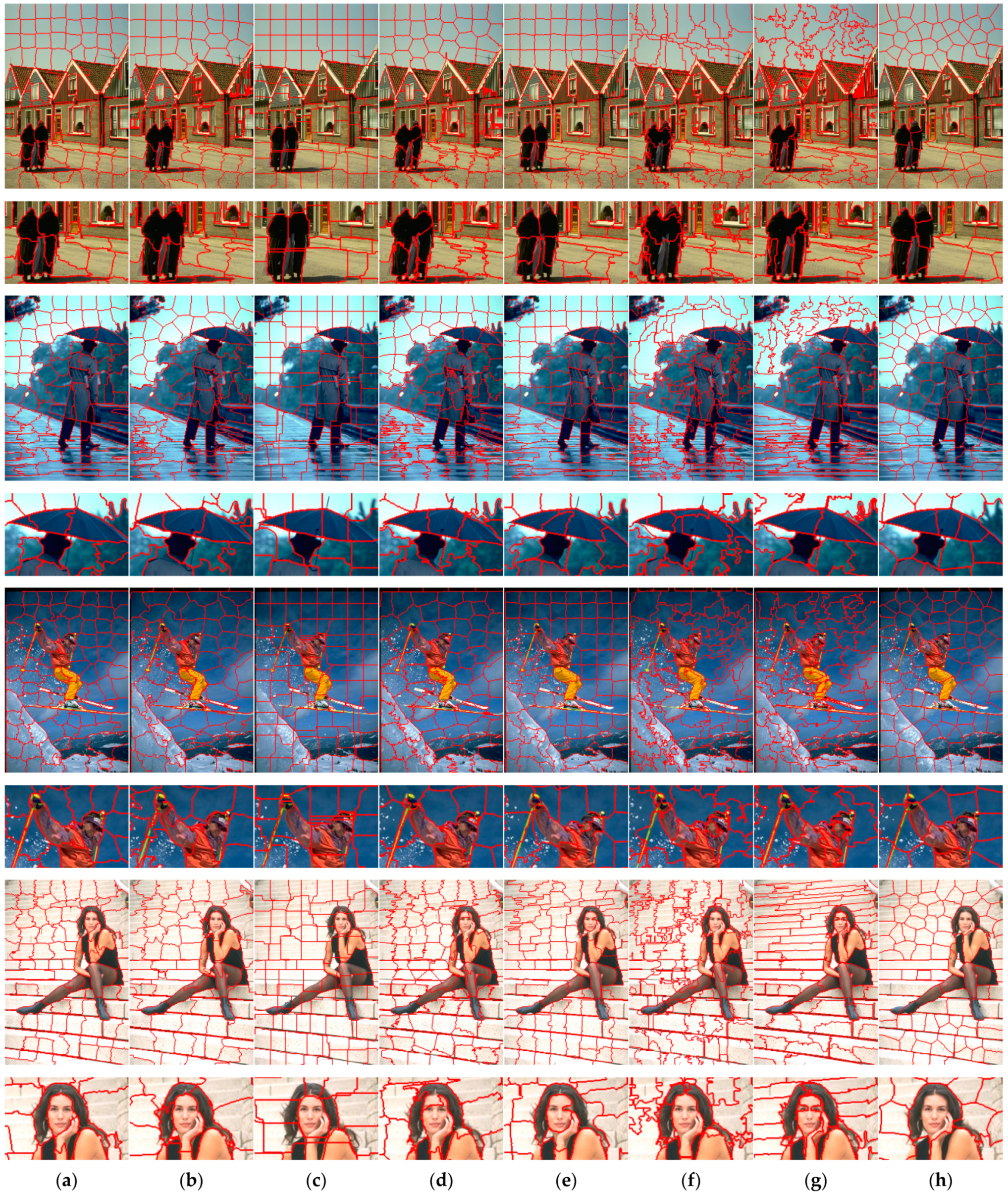
4.2.1. Visual Assessment
4.2.2. Metric Evaluation
4.3. Performance Comparison
4.3.1. Comprehensive Evaluation
4.3.2. More Discussion
5. Applications
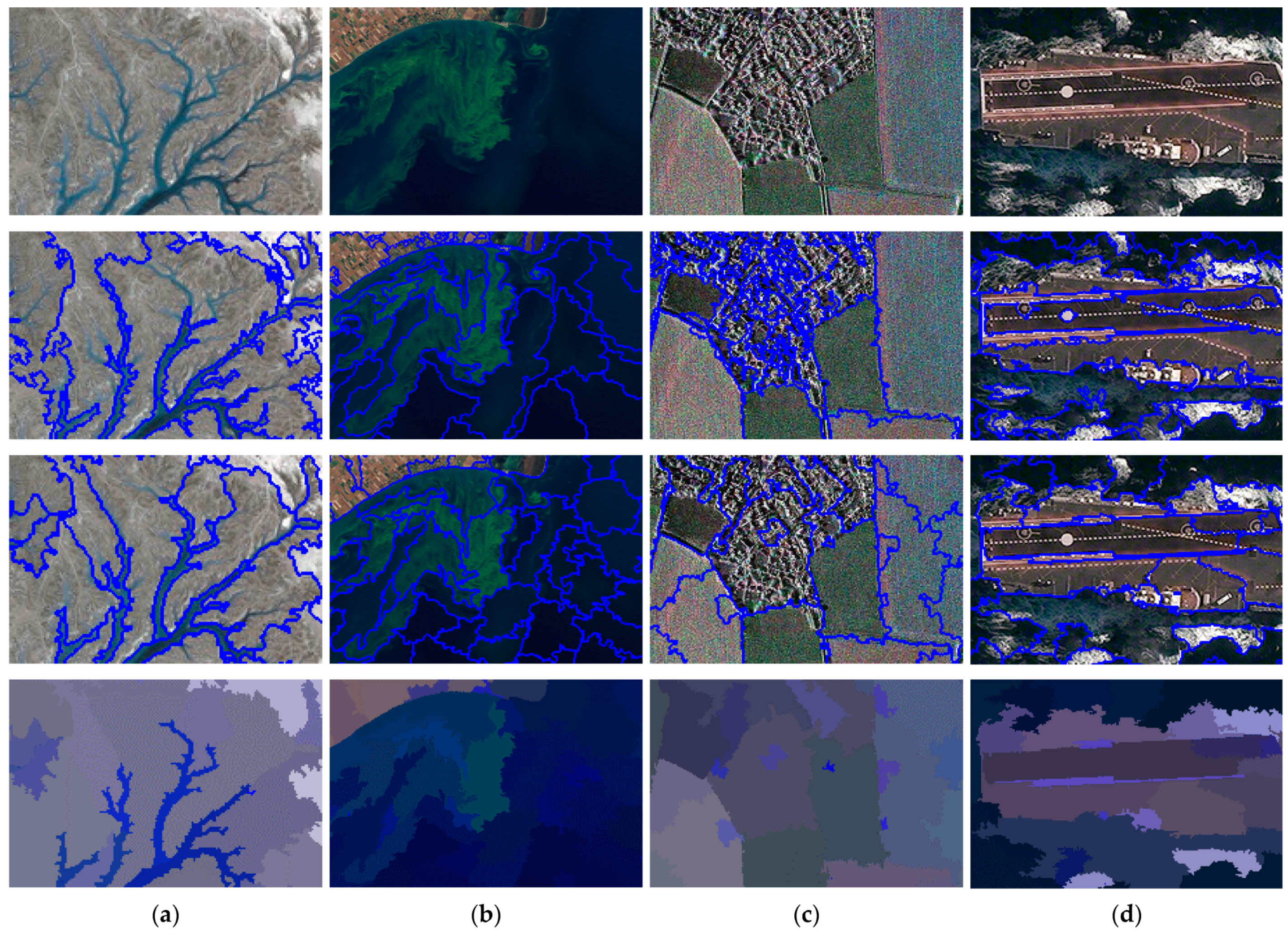
5.1. Multi-Resolution RS Imaging Segmentation
5.2. Pre-Process of Image Segmentation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ren, X.; Malik, J. Learning a classification model for segmentation. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Nice, France, 13–16 October 2003; pp. 10–17. [Google Scholar]
- Pappas, O.; Achim, A.; Bull, D. Superpixel-level CFAR detectors for ship detection in SAR imagery. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1397–1401. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Hu, H.; Wang, H.; Wang, K.; Liu, X.; Yu, W. Superpixel-based classification with an adaptive number of classes for polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2013, 51, 907–924. [Google Scholar] [CrossRef]
- Jin, X.; Gu, Y. Superpixel-based intrinsic image decomposition of hyperspectral images. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4285–4295. [Google Scholar] [CrossRef]
- Hu, Z.; Li, Q.; Zou, Q.; Zhang, Q.; Wu, G. A bilevel scale-sets model for hierarchical representation of large remote sensing images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7366–7377. [Google Scholar] [CrossRef]
- Yang, F.; Sun, Q.; Jin, H.; Zhou, Z. Superpixel segmentation with fully convolutional networks. In Proceedings of the Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 13961–13970. [Google Scholar]
- Stutz, D.; Hermans, A.; Leibe, B. Superpixels: An evaluation of the state-of-the-art. Comput. Vis. Image Underst. 2018, 166, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Levinshtein, A.; Stere, A.; Kutulakos, K.; Fleet, D.; Dickinson, S.; Siddiqi, K. Turbopixels: Fast superpixels using geometric flows. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2290–2297. [Google Scholar] [CrossRef] [Green Version]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 888–905. [Google Scholar]
- Liu, M.; Tuzel, O.; Ramalingam, S.; Chellappa, R. Entropy rate superpixel segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 2097–2104. [Google Scholar]
- Vincent, L.; Soille, P. Watersheds in digital spaces: An efficient algorithm based on immersion simulations. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 583–598. [Google Scholar] [CrossRef] [Green Version]
- Comaniciu, D.; Meer, P. Mean Shift: A robust approach toward feature space analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef] [Green Version]
- Neubert, P.; Protzel, P. Compact Watershed and Preemptive SLIC: On improving trade-offs of superpixel segmentation algorithms. In Proceedings of the IEEE International Conference on Pattern Recognition (ICPR), Stockholm, Sweden, 24–28 August 2014; pp. 996–1001. [Google Scholar]
- Zhao, J.; Hou, Q.; Ren, B.; Cheng, M.; Rosin, P. FLIC: Fast linear iterative clustering with active search. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI), New Orleans, LA, USA, 2–7 February 2018; pp. 7574–7581. [Google Scholar]
- Chen, J.; Li, Z.; Huang, B. Linear spectral clustering superpixel. IEEE Trans. Image Process. 2017, 26, 3317–3330. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yu, M.; Li, B.; He, Y. Intrinsic manifold SLIC: A simple and efficient method for computing content-sensitive superpixels. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 653–666. [Google Scholar] [CrossRef] [PubMed]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4895–4904. [Google Scholar]
- Giraud, R.; Ta, V.; Papadakis, N. Robust superpixels using color and contour features along linear path. Comput. Vis. Image Underst. 2018, 170, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Zou, H.; Qin, X.; Zhou, S.; Ji, K. A likelihood-based SLIC superpixel algorithm for SAR images using generalized gamma distribution. Sensors 2016, 16, 1107. [Google Scholar] [CrossRef]
- Lv, N.; Chen, C.; Qiu, T.; Sangaiah, A.K. Deep learning and superpixel feature extraction based on contractive autoencoder for change detection in SAR images. IEEE Trans. Ind. Inform. 2018, 14, 5530–5538. [Google Scholar] [CrossRef]
- Yang, S.; Yuan, X.; Liu, X.; Chen, Q. Superpixel generation for polarimetric SAR using hierarchical energy maximization. Comput. Geosci. 2020, 135, 104395. [Google Scholar] [CrossRef]
- Wang, P.; Zeng, G.; Gan, R.; Wang, J.; Zha, H. Structure-sensitive superpixels via geodesic distance. Int. J. Comput. Vis. 2013, 103, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Cao, X.; Tang, D.; Han, Y.; Xu, D. Regularity preserved superpixels and supervoxels. IEEE Trans. Multimedia 2014, 16, 1165–1175. [Google Scholar] [CrossRef]
- Xu, L.; Luo, B.; Pei, Z.; Qin, K. PFS: Particle-filter-based superpixel segmentation. Symmetry 2018, 10, 143. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Guo, B.; Huang, Z.; Gong, J.; Han, X.; He, W. GRID: GRID Resample by Information Distribution. Symmetry 2020, 12, 1417. [Google Scholar] [CrossRef]
- Gong, Y.; Zhou, Y. Differential evolutionary superpixel segmentation. IEEE Trans. Image Process. 2018, 27, 1390–1404. [Google Scholar] [CrossRef] [PubMed]
- Hu, Z.; Zou, Q.; Li, Q. Watershed superpixel. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 349–353. [Google Scholar]
- Machairas, V.; Faessel, M.; Cardenas, D.; Chabardes, T.; Walter, T.; Decencière, E. Waterpixels. IEEE Trans. Image Process. 2015, 24, 3707–3716. [Google Scholar] [CrossRef] [Green Version]
- Xiao, X.; Zhou, Y.; Gong, Y. Content-adaptive superpixel segmentation. IEEE Trans. Image Process. 2018, 27, 2883–2896. [Google Scholar] [CrossRef]
- Moore, A.; Prince, S.; Warrell, J.; Mohammed, U.; Jones, G. Superpixel lattices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Van den Bergh, M.; Boix, X.; Roig, G.; Van Gool, L. SEEDS: Superpixels extracted via energy-driven sampling. Int. J. Comput. Vis. 2015, 111, 298–314. [Google Scholar] [CrossRef]
- Veksler, O.; Boykov, Y.; Mehrani, P. Superpixels and supervoxels in an energy optimization framework. In Proceedings of the European Conference on Computer Vision (ECCV), Heraklion, Greece, 5–11 September 2010; pp. 211–224. [Google Scholar]
- Shen, J.; Du, Y.; Wang, W.; Li, X. Lazy random walks for superpixel segmentation. IEEE Trans. Image Process. 2014, 23, 1451–1462. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Wang, W.; Wang, W.; Lin, S.; Lin, Y. USEAQ: Ultra-fast superpixel extraction via adaptive sampling from quantized regions. IEEE Trans. Image Process. 2018, 27, 4916–4931. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Guo, B.; Wang, G.; Zheng, Y.; Liu, Y.; He, W. NICE: Superpixel segmentation using non-iterative clustering with efficiency. Appl. Sci. 2020, 10, 4415. [Google Scholar] [CrossRef]
- Arbelaez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour detection and hierarchical image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. (TPAMI) 2011, 33, 898–916. [Google Scholar] [CrossRef] [Green Version]
- Giraud, R.; Ta, V.; Papadakis, N. SCALP: Superpixels with contour adherence using linear path. In Proceedings of the IEEE International Conference on Pattern Recognition (ICPR), Cancún, Mexico, 4–8 December 2016; pp. 2374–2379. [Google Scholar]
- Wang, M.; Liu, X.; Gao, Y.; Ma, X.; Soomro, N. Superpixel segmentation: A benchmark. Signal Process. Image Commun. 2017, 56, 28–39. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. In Proceedings of the Symposium for Applied Geographic Information Processing, Karlsruhe, Germany, 5−7 July 2000; pp. 12–23. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Seed-Demand | Graph-Based | ||||||
|---|---|---|---|---|---|---|---|---|
| SNIC | SCALP | TPS | SLIC | WS | SEEDS | ERS | LRW | |
| Number | ● | ● | ● | ● | ● | ● | ● | ● |
| Compactness | ● | ● | ○ | ● | ● | ○ | ○ | ● |
| Iteration | ○ | ● | ○ | ● | ○ | ● | ● | ● |
| Complexity | ||||||||
| Code | C/C++ | C/Matlab | Matlab | C/C++ | C/Matlab | C/C++ | C/Matlab | C/Matlab |
| Method | User-Expected Superpixel Number | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
| CONIC | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 |
| SNIC | 40 | 96 | 150 | 187 | 260 | 294 | 330 | 400 | 442 | 504 |
| SCALP | 45 | 88 | 136 | 181 | 226 | 275 | 317 | 367 | 415 | 454 |
| TPS | 54 | 96 | 150 | 204 | 247 | 294 | 345 | 384 | 442 | 486 |
| SLIC | 41 | 92 | 143 | 185 | 252 | 289 | 324 | 394 | 436 | 496 |
| WS | 40 | 96 | 150 | 187 | 260 | 294 | 330 | 400 | 442 | 500 |
| SEEDS | 50 | 100 | 150 | 200 | 266 | - | - | - | - | - |
| ERS | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 |
| LRW | 40 | 99 | 153 | 204 | 258 | 311 | 361 | 417 | 470 | 513 |
| Index | Image Information | Execution Time (sec) | ||||
|---|---|---|---|---|---|---|
| Satellite | Resolution | Image Size | Description | eCognition | CONIC | |
| (a) | SPOT-5 | 2.5 m | Bandar-e Eman Khomeyn, Iran | 51.59 | 38.891 | |
| (b) | Landsat-5 | 30 m | Blue algae eruption in Lake Erie, USA | 29.359 | 20.609 | |
| (c) | TerraSAR-X | 1 m | Overlook of Harwell, Britain | 6.396 | 3.155 | |
| (d) | WorldView-2 | 0.5 m | Varyag in the Yellow Sea, China | 5.913 | 1.3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Guo, B.; Liao, N.; Gong, J.; Han, X.; Hou, S.; Chen, Z.; He, W. CONIC: Contour Optimized Non-Iterative Clustering Superpixel Segmentation. Remote Sens. 2021, 13, 1061. https://doi.org/10.3390/rs13061061
Li C, Guo B, Liao N, Gong J, Han X, Hou S, Chen Z, He W. CONIC: Contour Optimized Non-Iterative Clustering Superpixel Segmentation. Remote Sensing. 2021; 13(6):1061. https://doi.org/10.3390/rs13061061
Chicago/Turabian StyleLi, Cheng, Baolong Guo, Nannan Liao, Jianglei Gong, Xiaodong Han, Shuwei Hou, Zhijie Chen, and Wangpeng He. 2021. "CONIC: Contour Optimized Non-Iterative Clustering Superpixel Segmentation" Remote Sensing 13, no. 6: 1061. https://doi.org/10.3390/rs13061061
APA StyleLi, C., Guo, B., Liao, N., Gong, J., Han, X., Hou, S., Chen, Z., & He, W. (2021). CONIC: Contour Optimized Non-Iterative Clustering Superpixel Segmentation. Remote Sensing, 13(6), 1061. https://doi.org/10.3390/rs13061061