
Detection of Irrigated Permanent Grasslands with Sentinel-2 Based on Temporal Patterns of the Leaf Area Index (LAI)

 , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. The Study Site
2.2. Data Used
2.2.1. Field Survey
2.2.2. Satellite Data
2.3. Developed Irrigated Permanent Grassland Detection Algorithm
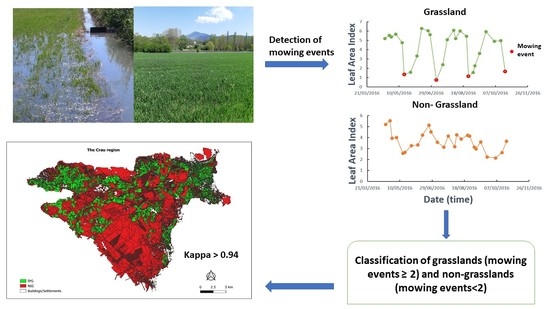
- There are at least 2 mowing events during the May to October period. If most of the irrigated grassland is managed with 3 or 4 mowing events, this threshold makes it possible to consider less intensively managed grasslands or to allow for the possibility of missing a mowing event due to an unfavourable time series with a long cloudy period during the mowing period. Such a situation can happen even in the Mediterranean area despite the high revisit frequencies of Sentinel-2 satellites.
- A mowing event is characterized by a local minimum with significant variations in LAI over 45 days before and after this minimum. The period of 45 days after the minimum reflects the growth time of the grassland after mowing. The period of 45 days before may seem long since a mowing induces an immediate drop in the amount of vegetation. However, we found that some mowings were delayed and then the grassland began to senesce, resulting in a decrease in green leaf area as captured by the LAI estimate. A shift of 10 to 20 days in the maximum LAI before mowing can thus be observed. In addition, gaps in LAI time series may lead to the maximum being sought over a somewhat longer period.
2.4. Calibration and Evaluation
2.5. Accuracy Assessment
2.6. Benchmark
3. Results
3.1. Calibration
3.2. Evaluation
4. Discussion
4.1. Impact of Plot Aggregation in the Classification Process
4.2. Ability to Detect Land-Use Changes
4.3. Novel Aspects and Generalization
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Decade for Action on Water for Sustainable Developmen. 2016. Available online: https://www.un.org/en/events/waterdecade/background.shtml (accessed on 14 April 2022).
- Wriedt, G.; Van der Velde, M.; Aloe, A.; Bouraoui, F. Estimating Irrigation Water Requirements in Europe. J. Hydrol. 2009, 373, 527–544. [Google Scholar] [CrossRef]
- Wada, Y.; Wisser, D.; Eisner, S.; Flörke, M.; Gerten, D.; Haddeland, I.; Hanasaki, N.; Masaki, Y.; Portmann, F.T.; Stacke, T.; et al. Multimodel Projections and Uncertainties of Irrigation Water Demand under Climate Change. Geophys. Res. Lett. 2013, 40, 4626–4632. [Google Scholar] [CrossRef] [Green Version]
- Marras, P.A.; Lima, D.C.A.; Soares, P.M.M.; Cardoso, R.M.; Medas, D.; Dore, E.; De Giudici, G. Future Precipitation in a Mediterranean Island and Streamflow Changes for a Small Basin Using EURO-CORDEX Regional Climate Simulations and the SWAT Model. J. Hydrol. 2021, 603, 127025. [Google Scholar] [CrossRef]
- Bazzi, H.; Baghdadi, N.; Ienco, D.; El Hajj, M.; Zribi, M.; Belhouchette, H.; Jose Escorihuela, M.; Demarez, V. Mapping Irrigated Areas Using Sentinel-1 Time Series in Catalonia, Spain. Remote Sens. 2019, 11, 1836. [Google Scholar] [CrossRef] [Green Version]
- Gao, Q.; Zribi, M.; Escorihuela, M.; Baghdadi, N.; Segui, P. Irrigation Mapping Using Sentinel-1 Time Series at Field Scale. Remote Sens. 2018, 10, 1495. [Google Scholar] [CrossRef] [Green Version]
- Ambika, A.K.; Wardlow, B.; Mishra, V. Remotely Sensed High Resolution Irrigated Area Mapping in India for 2000 to 2015. Sci. Data 2016, 3, 160118. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Massari, C.; Modanesi, S.; Dari, J.; Gruber, A.; De Lannoy, G.J.M.; Girotto, M.; Quintana-Segui, P.; Le Page, M.; Jarlan, L.; Zribi, M.; et al. A Review of Irrigation Information Retrievals from Space and Their Utility for Users. Remote Sens. 2021, 13, 4112. [Google Scholar] [CrossRef]
- Ozdogan, M.; Gutman, G. A New Methodology to Map Irrigated Areas Using Multi-Temporal MODIS and Ancillary Data: An Application Example in the Continental US. Remote Sens. Environ. 2008, 112, 3520–3537. [Google Scholar] [CrossRef] [Green Version]
- Deines, J.M.; Kendall, A.D.; Hyndman, D.W. Annual Irrigation Dynamics in the US Northern High Plains Derived from Landsat Satellite Data. Geophys. Res. Lett. 2017, 44, 9350–9360. [Google Scholar] [CrossRef]
- Maselli, F.; Battista, P.; Chiesi, M.; Rapi, B.; Angeli, L.; Fibbi, L.; Magno, R.; Gozzini, B. Use of Sentinel-2 MSI Data to Monitor Crop Irrigation in Mediterranean Areas. Int. J. Appl. Earth Obs. Geoinf. 2020, 93, 102216. [Google Scholar] [CrossRef]
- Pun, M.; Mutiibwa, D.; Li, R. Land Use Classification: A Surface Energy Balance and Vegetation Index Application to Map and Monitor Irrigated Lands. Remote Sens. 2017, 9, 1256. [Google Scholar] [CrossRef] [Green Version]
- Demarez, V.; Helen, F.; Marais-Sicre, C.; Baup, F. In-Season Mapping of Irrigated Crops Using Landsat 8 and Sentinel-1 Time Series. Remote Sens. 2019, 11, 118. [Google Scholar] [CrossRef] [Green Version]
- Pageot, Y.; Baup, F.; Inglada, J.; Baghdadi, N.; Demarez, V. Detection of Irrigated and Rainfed Crops in Temperate Areas Using Sentinel-1 and Sentinel-2 Time Series. Remote Sens. 2020, 12, 3044. [Google Scholar] [CrossRef]
- Julien, Y.; Sobrino, J.A.; Jiménez-Muñoz, J.-C. Land Use Classification from Multitemporal Landsat Imagery Using the Yearly Land Cover Dynamics (YLCD) Method. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 711–720. [Google Scholar] [CrossRef]
- Karantzalos, K.; Karmas, A.; Tzotsos, A. Monitoring Crop Growth and Key Agronomic Parameters through Multitemporal Observations and Time Series Analysis from Remote Sensing Big Data. Adv. Anim. Biosci. 2017, 8, 394–399. [Google Scholar] [CrossRef]
- Ashourloo, D.; Shahrabi, H.S.; Azadbakht, M.; Aghighi, H.; Nematollahi, H.; Alimohammadi, A.; Matkan, A.A. Automatic Canola Mapping Using Time Series of Sentinel 2 Images. ISPRS J. Photogramm. Remote Sens. 2019, 156, 63–76. [Google Scholar] [CrossRef]
- Ashourloo, D.; Shahrabi, H.S.; Azadbakht, M.; Rad, A.M.; Aghighi, H.; Radiom, S. A Novel Method for Automatic Potato Mapping Using Time Series of Sentinel-2 Images. Comput. Electron. Agric. 2020, 175, 105583. [Google Scholar] [CrossRef]
- Merot, A.; Bergez, J.-E.; Capillon, A.; Wery, J. Analysing Farming Practices to Develop a Numerical, Operational Model of Farmers’ Decision-Making Processes: An Irrigated Hay Cropping System in France. Agric. Syst. 2008, 98, 108–118. [Google Scholar] [CrossRef]
- Dusseux, P.; Vertes, F.; Corpetti, T.; Corgne, S.; Hubert-Moy, L. Agricultural Practices in Grasslands Detected by Spatial Remote Sensing. Environ. Monit. Assess. 2014, 186, 8249–8265. [Google Scholar] [CrossRef]
- Gómez Giménez, M.; de Jong, R.; Della Peruta, R.; Keller, A.; Schaepman, M.E. Determination of Grassland Use Intensity Based on Multi-Temporal Remote Sensing Data and Ecological Indicators. Remote Sens. Environ. 2017, 198, 126–139. [Google Scholar] [CrossRef]
- Stumpf, F.; Schneider, M.K.; Keller, A.; Mayr, A.; Rentschler, T.; Meuli, R.G.; Schaepman, M.; Liebisch, F. Spatial Monitoring of Grassland Management Using Multi-Temporal Satellite Imagery. Ecol. Indic. 2020, 113, 106201. [Google Scholar] [CrossRef]
- Courault, D.; Hadria, R.; Ruget, F.; Olioso, A.; Duchemin, B.; Hagolle, O.; Dedieu, G. Combined Use of FORMOSAT-2 Images with a Crop Model for Biomass and Water Monitoring of Permanent Grassland in Mediterranean Region. Hydrol. Earth Syst. Sci. 2010, 14, 1731–1744. [Google Scholar] [CrossRef] [Green Version]
- Schwieder, M.; Wesemeyer, M.; Frantz, D.; Pfoch, K.; Erasmi, S.; Pickert, J.; Nendel, C.; Hostert, P. Mapping Grassland Mowing Events across Germany Based on Combined Sentinel-2 and Landsat 8 Time Series. Remote Sens. Environ. 2022, 269, 112795. [Google Scholar] [CrossRef]
- Lobert, F.; Holtgrave, A.-K.; Schwieder, M.; Pause, M.; Vogt, J.; Gocht, A.; Erasmi, S. Mowing Event Detection in Permanent Grasslands: Systematic Evaluation of Input Features from Sentinel-1, Sentinel-2, and Landsat 8 Time Series. Remote Sens. Environ. 2021, 267, 112751. [Google Scholar] [CrossRef]
- Andreatta, D.; Gianelle, D.; Scotton, M.; Vescovo, L.; Dalponte, M. Detection of Grassland Mowing Frequency Using Time Series of Vegetation Indices from Sentinel-2 Imagery. GIScience Remote Sens. 2022, 59, 481–500. [Google Scholar] [CrossRef]
- Kolecka, N.; Ginzler, C.; Pazur, R.; Price, B.; Verburg, P.H. Regional Scale Mapping of Grassland Mowing Frequency with Sentinel-2 Time Series. Remote Sens. 2018, 10, 1221. [Google Scholar] [CrossRef] [Green Version]
- Taravat, A.; Wagner, M.; Oppelt, N. Automatic Grassland Cutting Status Detection in the Context of Spatiotemporal Sentinel-1 Imagery Analysis and Artificial Neural Networks. Remote Sens. 2019, 11, 711. [Google Scholar] [CrossRef] [Green Version]
- De Vroey, M.; Radoux, J.; Defourny, P. Grassland Mowing Detection Using Sentinel-1 Time Series: Potential and Limitations. Remote Sens. 2021, 13, 348. [Google Scholar] [CrossRef]
- Séraphin, P.; Vallet-Coulomb, C.; Gonçalvès, J. Partitioning Groundwater Recharge between Rainfall Infiltration and Irrigation Return Flow Using Stable Isotopes: The Crau Aquifer. J. Hydrol. 2016, 542, 241–253. [Google Scholar] [CrossRef]
- Trolard, F.; Bourrié, G.; Baillieux, A.; Buis, S.; Chanzy, A.; Clastre, P.; Closet, J.-F.; Courault, D.; Dangeard, M.-L.; Di Virgilio, N.; et al. The PRECOS Framework: Measuring the Impacts of the Global Changes on Soils, Water, Agriculture on Territories to Better Anticipate the Future. J. Environ. Manag. 2016, 181, 590–601. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Leroy, M.; Hautecoeur, O.; Bacour, C.; Prevot, L.; Bruguier, N. Validation of Neural Net Techniques to Estimate Canopy Biophysical Variables from Remote Sensing Data. Agronomie 2002, 22, 547–553. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Zhu, X.; Chen, J.; Wang, C.; Shen, M.; Yang, W.; Tan, X.; Xu, S.; Li, Z. Improving the Accuracy of Spring Phenology Detection by Optimally Smoothing Satellite Vegetation Index Time Series Based on Local Cloud Frequency. ISPRS J. Photogramm. Remote Sens. 2021, 180, 29–44. [Google Scholar] [CrossRef]
- Hastie, T.J.; Tibshirani, R.J. Generalized Additive Model; Chapman and Hall/CRC: London, UK, 1990; ISBN 978-0-412-34390-2. [Google Scholar]
- Congalton, R.G. Accuracy Assessment and Validation of Remotely Sensed and Other Spatial Information. Int. J. Wildland Fire 2001, 10, 321–328. [Google Scholar] [CrossRef] [Green Version]
- Inglada, J.; Vincent, A.; Arias, M.; Tardy, B.; Morin, D.; Rodes, I. Operational High Resolution Land Cover Map Production at the Country Scale Using Satellite Image Time Series. Remote Sens. 2017, 9, 95. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Average | Maximum | Minimum |
|---|---|---|---|
| 2016 | 26 | 31 | 20 |
| 2017 | 43 | 49 | 37 |
| 2018 | 52 | 61 | 44 |
| 2019 | 54 | 59 | 48 |
| 2020 | 49 | 56 | 42 |
| Parameters | Definitions | Range of Values Used When Calibrated | Final Value |
|---|---|---|---|
| fd | Degree of freedom of the smoothing algorithm | 5, 10, 15, 17 | 10 |
| tlaimax | LAI threshold. a pixel is declared being not a grassland when the maximum of LAI time series is greater than tlaimax | 10, 10.5, 11, 11.5 | 10.5 |
| tlaimin | LAI threshold. A pixel is declared not being a grassland when the maximum of the LAI time series is lower than tlaimin | 4.0, 4.1, 4.2, 4.3, 4.4, 4.5 | 4.2 |
| threshlai | LAI variation threshold before and after the detected minimum | 0.5, 1.0, 1.5, 2.0, 2.5 | 1.5 |
| dta1 | Period to search for the true minimum after the smoothed minimum | 15 | |
| dtb1 | Period to search for the true minimum before the smoothed minimum | 25 | |
| tlailow | LAI threshold to characterize unrealistic low LAI value | 0.4 | |
| nbb | Number of points to consider in searching the maximum before a cut | 2, 4, 6, 8 | 4 |
| dtmin1 | Minimum time interval between observations bracketting the minimum leading to selecting the largest tminlai (tminlai1) | 25 | |
| dtmin0 | Maximum time interval between observations bracketting the minimum leading to selecting the smallest tminlai (tminlai0) | 10 | |
| tminlai1 | Largest LAI threshold to validate a minimum LAI (when time sampling is sparse) | 2.5 | |
| tminlai0 | Smallest LAI threshold to validate a minimum LAI (when time sampling is frequent) | 2 | |
| dta | Period length after a minimum to characterize LAI variation | 45 | |
| dtb | Period length before a minimum to characterize LAI variation | 45 | |
| difmax | The difference between the observed and the smoothed LAI above which the LAI is corrected. | 2.6 | |
| Pixperc | The minimum rate of pixels detected as irrigated grass in a plot to classify it as an irrigated grass plot | 50, 70, 90 | 90 |
| Calibration Phases | Total Plots | TG | TNG | FG | FNG |
|---|---|---|---|---|---|
| First calibration phase | 748 | 372 | 281 | 69 | 26 |
| Second calibration phase | 748 | 416 | 304 | 25 | 3 |
| Year | Overall Accuracy | Producer’s Accuracy (IPG) | Producer’s Accuracy (NIG) | Kappa Indice |
|---|---|---|---|---|
| Developed Classification Leaf Area Index (Sentinel-2) + proposed algorithm | ||||
| 2016 | 97.7 | 95.2 | 100.0 | 0.96 |
| 2017 | 99.1 | 98.3 | 100.0 | 0.98 |
| 2018 | 99.7 | 99.4 | 100.0 | 0.99 |
| 2019 | 98.8 | 97.5 | 100.0 | 0.98 |
| 2020 | 96.9 | 93.8 | 99.7 | 0.94 |
| THEIA Classification Satellite image + Land use data + Supervised classification | ||||
| 2016 | 97.2 | 95.5 | 98.7 | 0.95 |
| 2017 | 98.6 | 96.9 | 100.0 | 0.97 |
| 2018 | 98.4 | 97.8 | 98.9 | 0.97 |
| Classification via Support Vector Machine (SVM) Satellite images + supervised classification using SVM method | ||||
| 2016 | 67.2 | 72.6 | 68.4 | 0.51 |
| 2017 | 71 | 78.3 | 79.1 | 0.63 |
| 2018 | 73.3 | 81.3 | 76.2 | 0.58 |
| Plot-Based Approach | |||
| IPG | NIG | Total plots | |
| 2016 | 13,318 ha | 40,264 ha | 53,581 ha |
| 2017 | 13,717 ha | 39,864 ha | 53,581 ha |
| 2018 | 13,839 ha | 39,742 ha | 53,581 ha |
| 2019 | 13,994 ha | 39,587 ha | 53,581 ha |
| 2020 | 13,850 ha | 39,731 ha | 53,581 ha |
| Pixel-Based Approach | |||
| IPG | NIG | Total pixels | |
| 2016 | 11,480 ha | 40,520 ha | 52,000 ha |
| 2017 | 11,770 ha | 40,230 ha | 52,000 ha |
| 2018 | 12,345 ha | 39,655 ha | 52,000 ha |
| 2019 | 11,561 ha | 40,439 ha | 52,000 ha |
| 2020 | 12,758 ha | 39,242 ha | 52,000 ha |
| Case ID | Land-Use Type | Sources of Variations | Number of Plots > 1 ha |
|---|---|---|---|
| Consistent classification through the 5 years | |||
| 1 | G G G G G | 3156 | |
| 2 | N N N N N | 6623 | |
| Plots presenting one land-use change through the 5 years | |||
| 3 | G G G G N | MGT (60); ERR (15) | 75 |
| 4 | G G G N N | MGT (34); LUC (15); EXPL (10) | 59 |
| 5 | G G N N N | MGT(40); LUC (40); EXPL (20) | 100 |
| 6 | G N N N N | MGT (21); EXPL (6); LUC (10) | 37 |
| 7 | N G G G G | MGT (139); EXPL (14); ERR (32) | 185 |
| 8 | N N G G G | MGT (27); LUC (7); EXPL(11); ERR (5) | 50 |
| 9 | N N N G G | MGT (20); ERR (5); LUC(6) | 31 |
| 10 | N N N N G | MGT (47); LUC (20); EXPL (3) | 70 |
| Plots presenting ≥ 2 land-use changes through the 5 years | |||
| 11 | G N G N G | MGT(65); EXPL (25); ERR (10) | 100 |
| 12 | All plots | 331 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abubakar, M.; Chanzy, A.; Pouget, G.; Flamain, F.; Courault, D. Detection of Irrigated Permanent Grasslands with Sentinel-2 Based on Temporal Patterns of the Leaf Area Index (LAI). Remote Sens. 2022, 14, 3056. https://doi.org/10.3390/rs14133056
Abubakar M, Chanzy A, Pouget G, Flamain F, Courault D. Detection of Irrigated Permanent Grasslands with Sentinel-2 Based on Temporal Patterns of the Leaf Area Index (LAI). Remote Sensing. 2022; 14(13):3056. https://doi.org/10.3390/rs14133056
Chicago/Turabian StyleAbubakar, Mukhtar, André Chanzy, Guillaume Pouget, Fabrice Flamain, and Dominique Courault. 2022. "Detection of Irrigated Permanent Grasslands with Sentinel-2 Based on Temporal Patterns of the Leaf Area Index (LAI)" Remote Sensing 14, no. 13: 3056. https://doi.org/10.3390/rs14133056
APA StyleAbubakar, M., Chanzy, A., Pouget, G., Flamain, F., & Courault, D. (2022). Detection of Irrigated Permanent Grasslands with Sentinel-2 Based on Temporal Patterns of the Leaf Area Index (LAI). Remote Sensing, 14(13), 3056. https://doi.org/10.3390/rs14133056