
Self-Supervised Denoising for Real Satellite Hyperspectral Imagery


Abstract
:1. Introduction
- The 3S-HSID framework is a strict self-supervised denoising method. A Bernoulli sampling of a single hyperspectral image can be used to construct the clean/noisy image pairs required for training. No external training data are needed, and the noise situation of the hyperspectral data is not estimated. No clean band is needed as a reference, and no spatial adjacent bands are needed for auxiliary denoising. All hyperspectral bands can be denoised at the same time, especially in the case of real satellite hyperspectral images;
- The 3S-HSID framework establishes a global spectral consistency constraint between the model input and output, which maximizes the recovery of spectral characteristics of ground objects while restoring spatial information;
- The 3S-HSID framework can be applied in different platforms, at different spatial resolutions, and in different spectral resolution satellite hyperspectral image denoising experiments, and the different types of noise removal effects are remarkable, thus providing a new solution for the denoising of real satellite hyperspectral images.
2. Materials and Methods
2.1. Datasets
- 1.
- The Pavia University dataset is a commonly used airborne hyperspectral dataset obtained by the ROSIS sensor with 115 bands. To increase the possibility of its application in all kinds of noise simulations, we used only 87 bands, and the data size was 256 × 256.
- 2.
- GF-14 is an optical stereo mapping satellite arranged by the National Science and Technology Major Project of the High-Resolution Earth Observation System, which was launched into orbit on 6 December 2020. The satellite hyperspectral imager carried by GF-14 can obtain hyperspectral images with a spatial resolution of 5 m in visible to near-infrared wavelengths and of 10 m in the short-wave infrared wavelength, with 70 and 30 bands, respectively. The data used in this paper were captured by GF-14 in 2021, and radiation and atmospheric corrections were carried out before denoising.
- 3.
- The Zhuhai-1 remote sensing micro–nanosatellite constellation is a commercial remote sensing micro–nanosatellite constellation constructed and operated by Zhuhai Obit Aerospace Science and Technology Co., Ltd., Zhuhai, Guangdong, China. The Zhuhai-1 constellation contains different types of micro- and nano-satellites, including video satellites, high-resolution optical satellites, hyperspectral satellites, SAR satellites, and infrared satellites. Among them, the hyperspectral satellite (ZH-1) was launched into orbit on 26 April 2018. Its orbit height is 500 km, the imaging width is 150 km, the spatial resolution is 10 m, the spectral resolution is 2.5 nm, the wavelength range is 400–1000 nm, and the number of bands is 32. The data used in this paper are OHS captures of Shenzhen, China, on January 31, 2021. Before denoising, radiation and atmospheric corrections were carried out.
- 4.
- The hyperspectral pioneer and application mission (PRISMA) satellite was launched into orbit by the Italian Space Agency on 21 March 2019. Its orbit height is 620 km, which allows complete coverage of Earth. The imaging width of PRISMA is 30 km. Hyperspectral images with a spatial resolution of 30 m can be obtained in orbit. The spectral resolution is lower than 12 nm, and the number of imaging bands in the visible and near-infrared ranges is 66 and 173, respectively. At present, PRISMA data can be freely downloaded, and the official hyperspectral data at L0–L2 levels are provided.
2.2. Satellite Hyperspectral Image Degradation
2.3. 3S-HSID Network Framework
2.4. Dropout Strategy
2.5. Training Scheme
2.6. Model Structure
2.7. Loss Function
2.8. Denoising Scheme
3. Results
3.1. Experimental Setup
- Case 1 (including Case 11 and Case 12): Adding Gaussian noise with the same mean intensity to each band of the original data, where the standard deviation of the Gaussian noise is ;
- Case 2: Adding Gaussian noise with a different mean intensity to each band of the original data, where the standard deviation range of the Gaussian noise is
- Case 3: Based on Case 2, salt and pepper noise of different proportions is added to 30% of the bands in the original data, where the proportion range of the salt and pepper noise is ;
- Case 4: Based on Case 2 and Case 3, bad lines of different proportions are added to 30% of the bands in the original data, where the proportion range of the bad lines is .
3.2. Simulation Denoising Experiment
- PSNR, SSIM
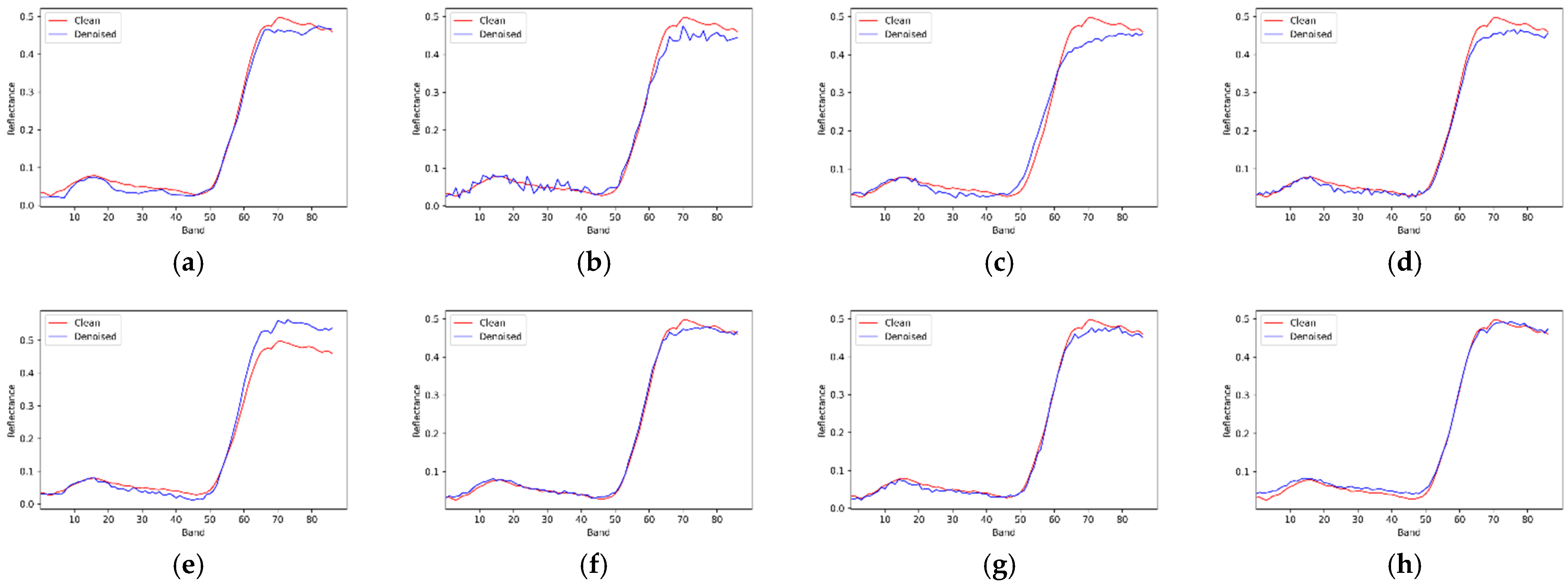
- SAM
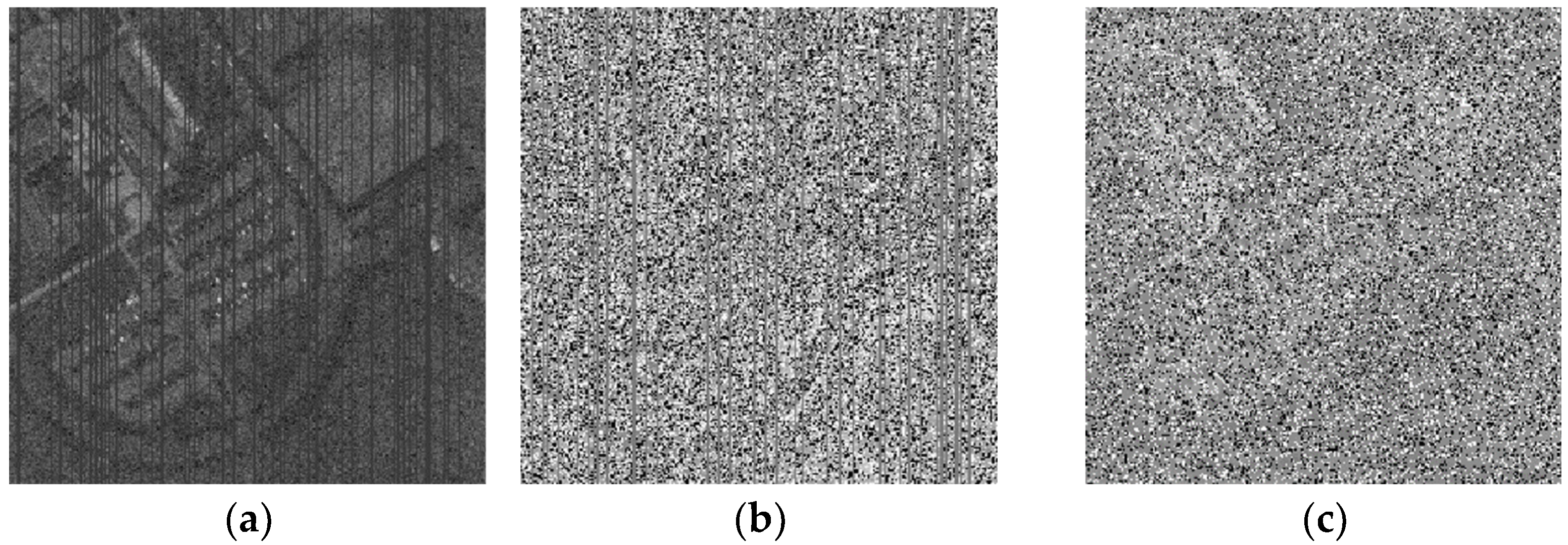
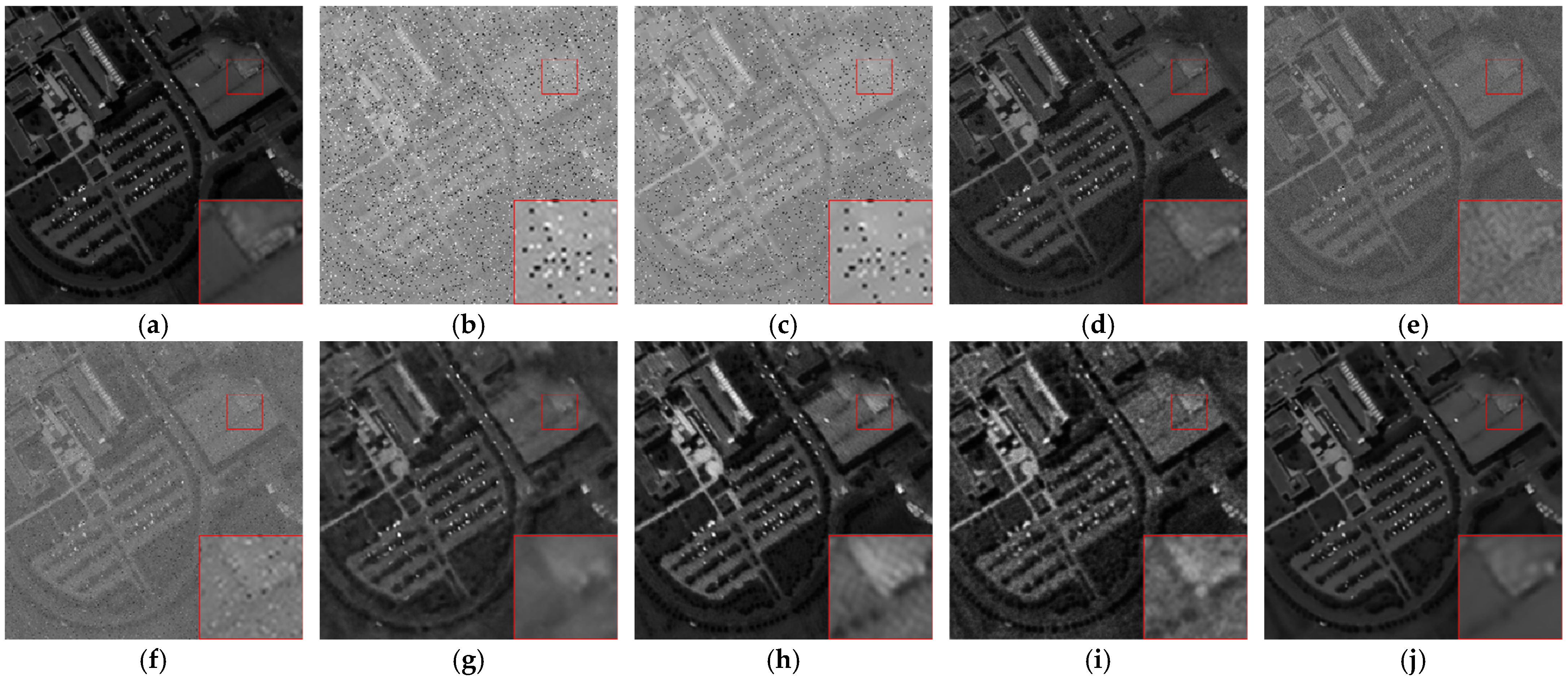
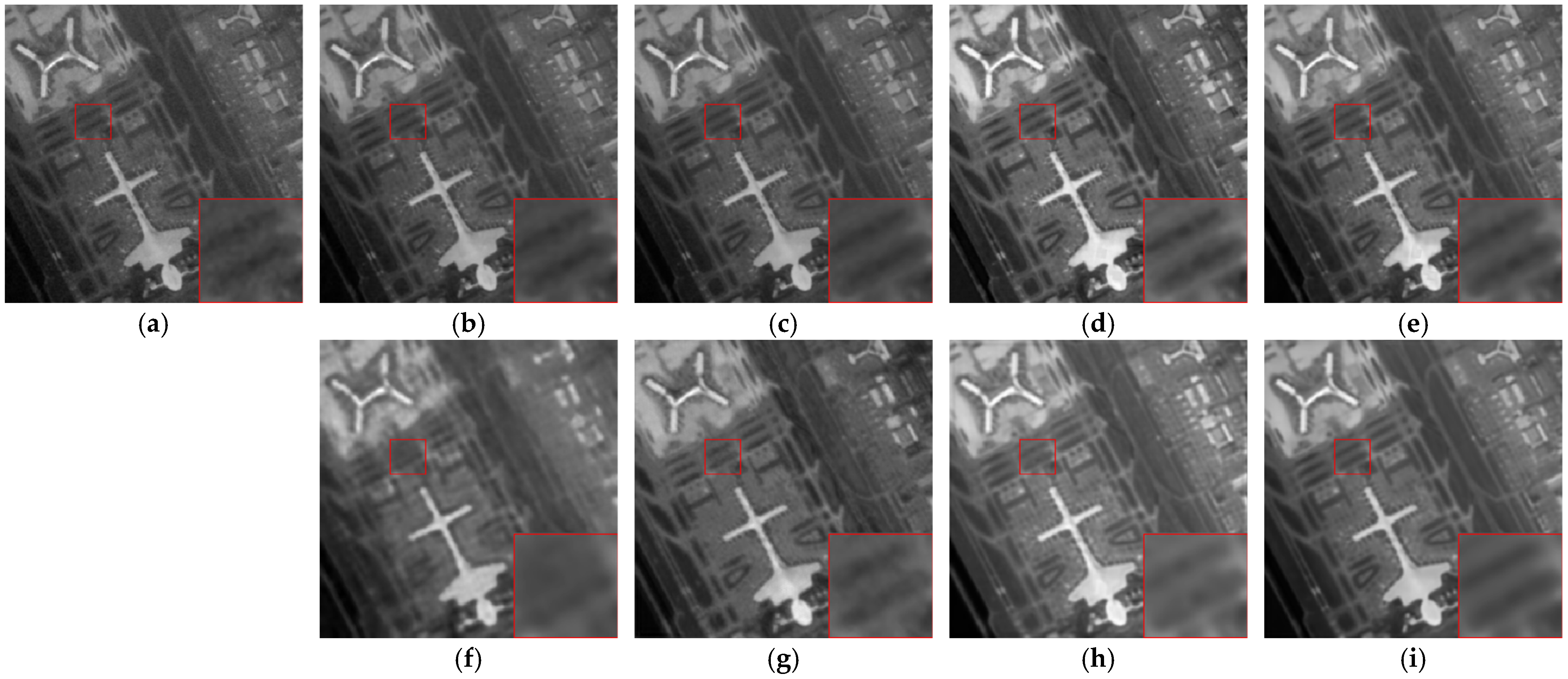
3.3. Real Satellite HSIs Denoising Experiment
4. Discussion
4.1. Hyperparametric Analysis
- Bernoulli sampling probability and dropout probability
- Number of iterations
4.2. Future Works
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Transon, J.; D’Andrimont, R.; Maugnard, A.; Defourny, P. Survey of Hyperspectral Earth Observation Applications from Space in the Sentinel-2 Context. Remote Sens. 2018, 10, 157. [Google Scholar] [CrossRef] [Green Version]
- Meng, S.; Wang, X.; Hu, X.; Luo, C.; Zhong, Y. Deep learning-based crop mapping in the cloudy season using one-shot hyperspectral satellite imagery. Comput. Electron. Agric. 2021, 186, 106188. [Google Scholar] [CrossRef]
- Pandey, D.; Tiwari, K.C. New spectral indices for detection of urban built-up surfaces and its sub-classes in AVIRIS-NG hyperspectral imagery. Geocarto Int. 2020, 37, 1949–1970. [Google Scholar] [CrossRef]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. Water Quality Retrieval from PRISMA Hyperspectral Images: First Experience in a Turbid Lake and Comparison with Sentinel-2. Remote Sens. 2020, 12, 3984. [Google Scholar] [CrossRef]
- Xie, Y.; Sha, Z.; Mesev, V. Remote Sensing of Sustainable Ecosystems. J. Sens. 2018, 2018, 9683415. [Google Scholar] [CrossRef]
- Chen, Y.; Cao, X.; Zhao, Q.; Meng, D.; Xu, Z. Denoising Hyperspectral Image with Non-i.i.d. Noise Structure. IEEE Trans. Cybern. 2018, 48, 1054–1066. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nalepa, J.; Myller, M.; Cwiek, M.; Zak, L.; Lakota, T.; Tulczyjew, L.; Kawulok, M. Towards On-Board Hyperspectral Satellite Image Segmentation: Understanding Robustness of Deep Learning through Simulating Acquisition Conditions. Remote Sens. 2021, 13, 1532. [Google Scholar] [CrossRef]
- He, W.; Zhang, H.; Zhang, L.; Shen, H. Total-Variation-Regularized Low-Rank Matrix Factorization for Hyperspectral Image Restoration. IEEE Trans. Geosci. Remote Sens. 2016, 54, 178–188. [Google Scholar] [CrossRef]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering. IEEE Trans. Image Processing 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J. A non-local algorithm for image denoising. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 60–65. [Google Scholar]
- Gu, S.; Zhang, L.; Zuo, W.; Feng, X. Weighted Nuclear Norm Minimization with Application to Image Denoising. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2862–2869. [Google Scholar]
- Xie, W.; Li, Y.; Jia, X. Deep convolutional networks with residual learning for accurate spectral-spatial denoising. Neurocomputing 2018, 312, 372–381. [Google Scholar] [CrossRef]
- Zhang, H.; He, W.; Zhang, L.; Shen, H.; Yuan, Q. Hyperspectral Image Restoration Using Low-Rank Matrix Recovery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4729–4743. [Google Scholar] [CrossRef]
- Rasti, B.; Ulfarsson, M.O.; Ghamisi, P. Automatic Hyperspectral Image Restoration Using Sparse and Low-Rank Modeling. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2335–2339. [Google Scholar] [CrossRef]
- Xue, J.; Zhao, Y.; Liao, W.; Kong, S. Joint Spatial and Spectral Low-Rank Regularization for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1940–1958. [Google Scholar] [CrossRef]
- Xue, J.; Zhao, Y.; Liao, W.; Chan, J.C. Nonlocal Low-Rank Regularized Tensor Decomposition for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5174–5189. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, L.; Shen, H. Hyperspectral Image Denoising Employing a Spectral–Spatial Adaptive Total Variation Model. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3660–3677. [Google Scholar] [CrossRef]
- Aggarwal, H.K.; Majumdar, A. Hyperspectral Image Denoising Using Spatio-Spectral Total Variation. IEEE Geosci. Remote Sens. Lett. 2016, 13, 442–446. [Google Scholar] [CrossRef]
- Li, J.; Yuan, Q.; Shen, H.; Zhang, L. Noise Removal From Hyperspectral Image With Joint Spectral–Spatial Distributed Sparse Representation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5425–5439. [Google Scholar] [CrossRef]
- Lu, T.; Li, S.; Fang, L.; Ma, Y.; Benediktsson, J.A. Spectral–Spatial Adaptive Sparse Representation for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2016, 54, 373–385. [Google Scholar] [CrossRef]
- Candès, E.J.; Li, X.; Ma, Y.; Wright, J. Robust principal component analysis? J. ACM 2011, 58, 1–37. [Google Scholar] [CrossRef]
- Lefkimmiatis, S.; Roussos, A.; Maragos, P.; Unser, M. Structure Tensor Total Variation. SIAM J. Imaging Sci. 2015, 8, 1090–1122. [Google Scholar] [CrossRef]
- Fei, X.; Miao, J.; Zhao, Y.; Huang, W.; Yu, R. Total Variation Regularized Low-Rank Model With Directional Information for Hyperspectral Image Restoration. IEEE Access 2021, 9, 84156–84169. [Google Scholar] [CrossRef]
- Xie, W.; Li, Y. Hyperspectral Imagery Denoising by Deep Learning With Trainable Nonlinearity Function. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1963–1967. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Trans. Image Processing 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xie, W.; Li, Y.; Hu, J.; Chen, D.-Y. Trainable spectral difference learning with spatial starting for hyperspectral image denoising. Neural Netw. 2018, 108, 272–286. [Google Scholar] [CrossRef]
- Yuan, Q.; Zhang, Q.; Li, J.; Shen, H.; Zhang, L. Hyperspectral Image Denoising Employing a Spatial–Spectral Deep Residual Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1205–1218. [Google Scholar] [CrossRef] [Green Version]
- Maffei, A.; Haut, J.M.; Paoletti, M.E.; Plaza, J.; Bruzzone, L.; Plaza, A. A Single Model CNN for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2516–2529. [Google Scholar] [CrossRef]
- Liu, S.; Feng, J.; Tian, Z. Variational Low-Rank Matrix Factorization with Multi-Patch Collaborative Learning for Hyperspectral Imagery Mixed Denoising. Remote Sens. 2021, 13, 1101. [Google Scholar] [CrossRef]
- Zhuang, L.; Ng, M.K.; Fu, X. Hyperspectral Image Mixed Noise Removal Using Subspace Representation and Deep CNN Image Prior. Remote Sens. 2021, 13, 4098. [Google Scholar] [CrossRef]
- Jiang, T.X.; Zhuang, L.; Huang, T.Z.; Zhao, X.L.; Bioucas-Dias, J.M. Adaptive Hyperspectral Mixed Noise Removal. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Xiong, F.; Zhou, J.; Zhao, Q.; Lu, J.; Qian, Y. MAC-Net: Model-Aided Nonlocal Neural Network for Hyperspectral Image Denoising. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Kan, Z.; Li, S.; Zhang, Y. Attention-Based Octave Dense Network for Hyperspectral Image Denoising. In Proceedings of the 2021 IEEE 4th International Conference on Big Data and Artificial Intelligence (BDAI), Qingdao, China, 2–4 July 2021; pp. 230–235. [Google Scholar]
- Shi, Q.; Tang, X.; Yang, T.; Liu, R.; Zhang, L. Hyperspectral Image Denoising Using a 3-D Attention Denoising Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 10348–10363. [Google Scholar] [CrossRef]
- Wang, Z.; Shao, Z.; Huang, X.; Wang, J.; Lu, T. SSCAN: A Spatial–Spectral Cross Attention Network for Hyperspectral Image Denoising. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Yuan, Y.; Ma, H.; Liu, G. Partial-DNet: A Novel Blind Denoising Model With Noise Intensity Estimation for HSI. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Lempitsky, V.; Vedaldi, A.; Ulyanov, D. Deep Image Prior. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9446–9454. [Google Scholar]
- Sidorov, O.; Hardeberg, J.Y. Deep Hyperspectral Prior: Single-Image Denoising, Inpainting, Super-Resolution. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2019; pp. 3844–3851. [Google Scholar]
- Luo, Y.S.; Zhao, X.L.; Jiang, T.X.; Zheng, Y.B.; Chang, Y. Hyperspectral Mixed Noise Removal via Spatial-Spectral Constrained Unsupervised Deep Image Prior. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 9435–9449. [Google Scholar] [CrossRef]
- Imamura, R.; Itasaka, T.; Okuda, M. Zero-Shot Hyperspectral Image Denoising with Separable Image Prior. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27–28 October 2019; pp. 1416–1420. [Google Scholar]
- Fu, G.; Xiong, F.; Tao, S.; Lu, J.; Zhou, J.; Qian, Y. Learning a Model-Based Deep Hyperspectral Denoiser from a Single Noisy Hyperspectral Image. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 4131–4134. [Google Scholar]
- Wang, X.; Luo, Z.; Li, W.; Hu, X.; Zhang, L.; Zhong, Y. A Self-Supervised Denoising Network for Satellite-Airborne-Ground Hyperspectral Imagery. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Qian, Y.; Zhu, H.; Chen, L.; Zhou, J. Hyperspectral Image Restoration With Self-Supervised Learning: A Two-Stage Training Approach. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Quan, Y.; Chen, M.; Pang, T.; Ji, H. Self2Self with Dropout: Learning Self-Supervised Denoising from Single Image. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 1887–1895. [Google Scholar]
- Srivastava, N.; Hinton, G.E.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Gal, Y.; Ghahramani, Z. Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning. arXiv 2016, arXiv:1506.02142. [Google Scholar]
- Maggioni, M.; Foi, A. Nonlocal Transform-Domain Denoising of Volumetric Data with Groupwise Adaptive Variance Estimation; SPIE: Bellingham, WA, USA, 2012; Volume 8296. [Google Scholar]
- Zhuang, L.; Ng, M.K. Hyperspectral Mixed Noise Removal By l-Norm-Based Subspace Representation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1143–1157. [Google Scholar]
- Nguyen, H.V.; Ulfarsson, M.O.; Sveinsson, J.R. Hyperspectral Image Denoising Using SURE-Based Unsupervised Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2021, 59, 3369–3382. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Configuration | Strategy | Output Size |
|---|---|---|---|
| Input | Bernoulli Sampling | Dropout | |
| Extractor | PartialConv + BN + LeakyReLU | Extract features | |
| PartialConv + BN + LeakyReLU | Extract features | ||
| Encoder | PartialConv + BN + LeakyReLU + MaxPool | Downsample | |
| PartialConv + BN + LeakyReLU + MaxPool | Downsample | ||
| PartialConv + BN + LeakyReLU + MaxPool | Downsample | ||
| PartialConv + BN + LeakyReLU + MaxPool | Downsample | ||
| PartialConv + BN + LeakyReLU + MaxPool | Downsample | ||
| PartialConv + BN + LeakyReLU + MaxPool | Upsample | ||
| Decoder | Conv + LeakyReLU + Conv + LeakyReLU | Upsample + Dropout | /8 × 512 |
| Conv + LeakyReLU + Conv + LeakyReLU | Upsample + Dropout | /4 × 512 | |
| Conv + LeakyReLU + Conv + LeakyReLU | Upsample + Dropout | /2 × 512 | |
| Conv + LeakyReLU + Conv + LeakyReLU | Upsample + Dropout | × 512 | |
| Denoising | Conv + LeakyReLU + Conv + LeakyReLU + Conv + Sigmoid | Dropout |
| PaviaU | Noise Level | Metrics | Noisy | BM4D | LRMR | HyRes | L1HyMixDe | DHP-2D | SIP | SURE-CNN | 3S-HSID |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Case11 | PSNR | 21.941 | 35.298 | 34.260 | 32.333 | 35.759 | 30.527 | 34.643 | 36.118 | 35.785 | |
| SSIM | 0.5620 | 0.9750 | 0.9563 | 0.9204 | 0.9719 | 0.9280 | 0.9728 | 0.9796 | 0.9779 | ||
| SAM | 0.4187 | 0.0717 | 0.1012 | 0.1373 | 0.0720 | 0.0773 | 0.0664 | 0.0579 | 0.0516 | ||
| Case12 | PSNR | 20.001 | 34.667 | 32.533 | 32.397 | 34.258 | 30.368 | 34.527 | 35.612 | 34.786 | |
| SSIM | 0.4636 | 0.9669 | 0.9362 | 0.9226 | 0.9604 | 0.9245 | 0.9717 | 0.9766 | 0.9728 | ||
| SAM | 0.4993 | 0.0807 | 0.1226 | 0.1286 | 0.0851 | 0.0798 | 0.0696 | 0.0596 | 0.0558 | ||
| Case2 | PSNR | 29.027 | 37.819 | 35.983 | 42.270 | 40.554 | 30.332 | 35.317 | 36.847 | 36.291 | |
| SSIM | 0.7519 | 0.9759 | 0.9616 | 0.9909 | 0.9880 | 0.9237 | 0.9767 | 0.9832 | 0.9808 | ||
| SAM | 0.3226 | 0.0789 | 0.0994 | 0.0464 | 0.0471 | 0.0783 | 0.0653 | 0.0546 | 0.0461 | ||
| Case3 | Case2+ | PSNR | 20.781 | 26.913 | 28.878 | 30.615 | 31.258 | 26.593 | 26.435 | 26.799 | 28.006 |
| SSIM | 0.5291 | 0.6960 | 0.8399 | 0.7879 | 0.8216 | 0.7871 | 0.8778 | 0.8471 | 0.9027 | ||
| SAM | 0.9714 | 0.7962 | 0.6108 | 0.4286 | 0.2800 | 0.3580 | 0.1969 | 0.1787 | 0.2052 | ||
| Case4 | Case2+Case3+ | PSNR | 20.006 | 24.401 | 26.830 | 33.067 | 30.045 | 26.787 | 25.277 | 25.852 | 26.838 |
| SSIM | 0.4945 | 0.6535 | 0.8026 | 0.9338 | 0.8058 | 0.7764 | 0.8202 | 0.8236 | 0.9011 | ||
| SAM | 1.0415 | 0.8362 | 0.5982 | 0.2091 | 0.2568 | 0.4314 | 0.2626 | 0.2070 | 0.2055 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, J.; Zhao, H.; Liu, B. Self-Supervised Denoising for Real Satellite Hyperspectral Imagery. Remote Sens. 2022, 14, 3083. https://doi.org/10.3390/rs14133083
Qin J, Zhao H, Liu B. Self-Supervised Denoising for Real Satellite Hyperspectral Imagery. Remote Sensing. 2022; 14(13):3083. https://doi.org/10.3390/rs14133083
Chicago/Turabian StyleQin, Jinchun, Hongrui Zhao, and Bing Liu. 2022. "Self-Supervised Denoising for Real Satellite Hyperspectral Imagery" Remote Sensing 14, no. 13: 3083. https://doi.org/10.3390/rs14133083
APA StyleQin, J., Zhao, H., & Liu, B. (2022). Self-Supervised Denoising for Real Satellite Hyperspectral Imagery. Remote Sensing, 14(13), 3083. https://doi.org/10.3390/rs14133083