
Comparative Evaluation of a Newly Developed Trunk-Based Tree Detection/Localization Strategy on Leaf-Off LiDAR Point Clouds with Varying Characteristics

 , , , and
, , , and 
Abstract
:1. Introduction
- Airborne LiDAR systems (ALS) with large spatial coverage are suitable for regional canopy height model (CHM) generation, while small foot-print LiDAR from low altitude flights provides high-resolution data for individual tree isolation;
- UAV and Geiger-mode LiDAR are adequate for individual tree localization and tree height estimation. Although the former has a higher point density and better penetration ability, the latter is capable of deriving accurate point clouds with reasonable resolution over much larger areas;
- Due to the occlusion problem caused by dense canopy, it is recommended to conduct UAV flights under leaf-off conditions to derive digital terrain model (DTM) and timber volume;
- Compared to ALS and UAV LiDAR, Backpack LiDAR can capture a fine level of detail with high precision, allowing for the derivation of forest inventory metrics at the stand level.
- Propose a new tree detection and localization approach based on the local height differences related to tree trunks;
- Propose a novel system calibration approach for the UAV LiDAR system based on tree trunks and ground patches extracted from a forest dataset;
- Conduct a comparative analysis of three different tree trunk detection/localization strategies—DBSCAN-based approach, height/density-based approach, and height-difference-based approach, while highlighting the main differences;
- Assess the impact of point density, geometric quality, and environmental complexity on the performance of these three approaches, providing recommendations on the selection of appropriate tree detection and localization approaches for leaf-off LiDAR data with different characteristics.
2. Data Acquisition Systems and Dataset Description
2.1. Mobile LiDAR Systems
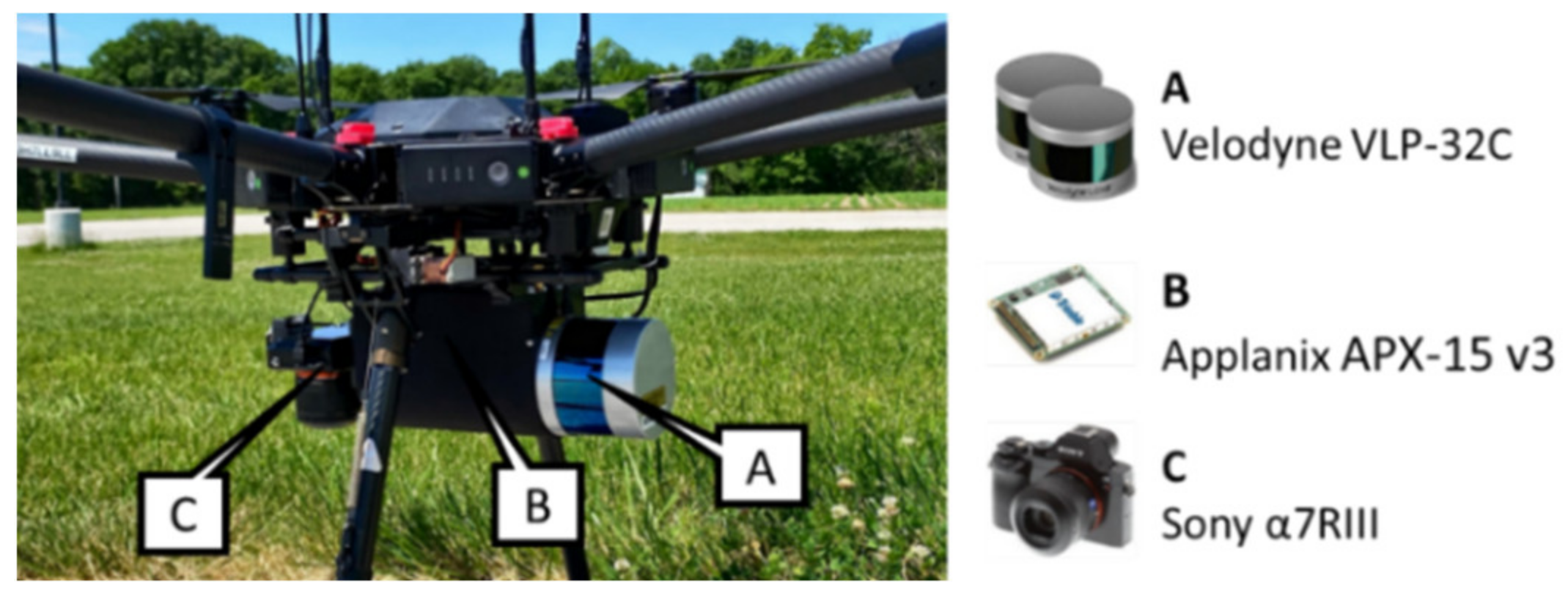
2.1.1. UAV LiDAR Systems
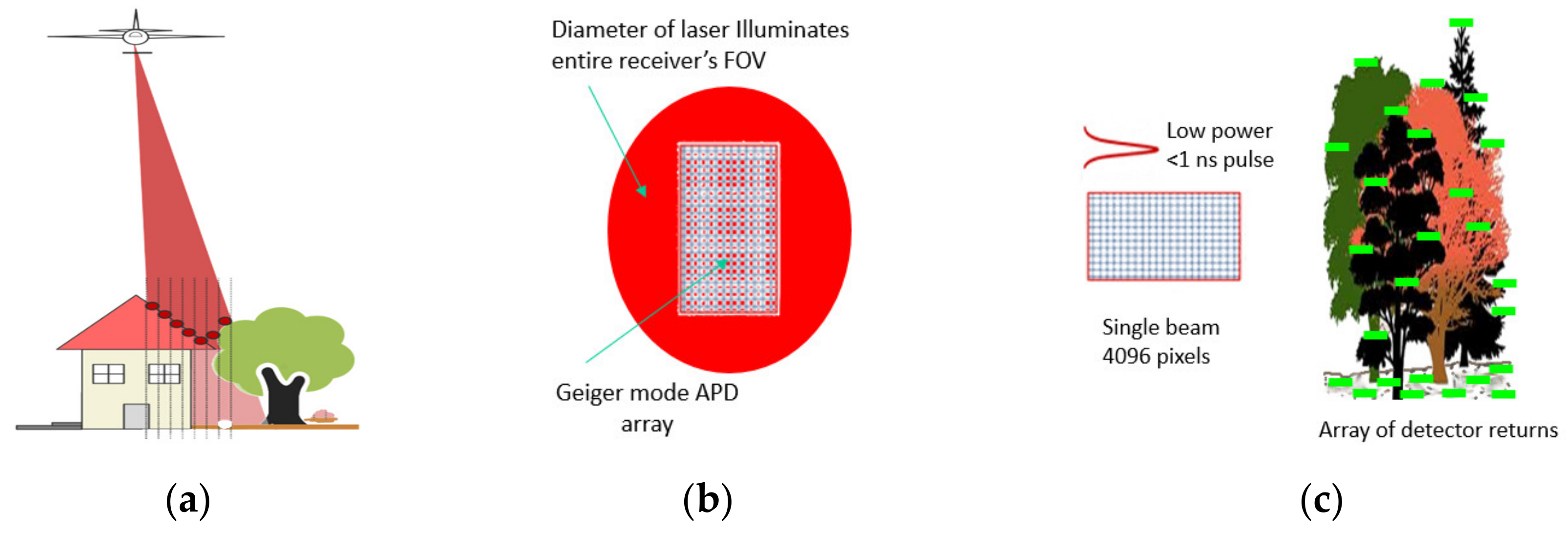
2.1.2. Geiger-Mode LiDAR System
2.2. Study Site and Dataset Description
2.2.1. Study Site
2.2.2. Dataset Description
3. Methodology
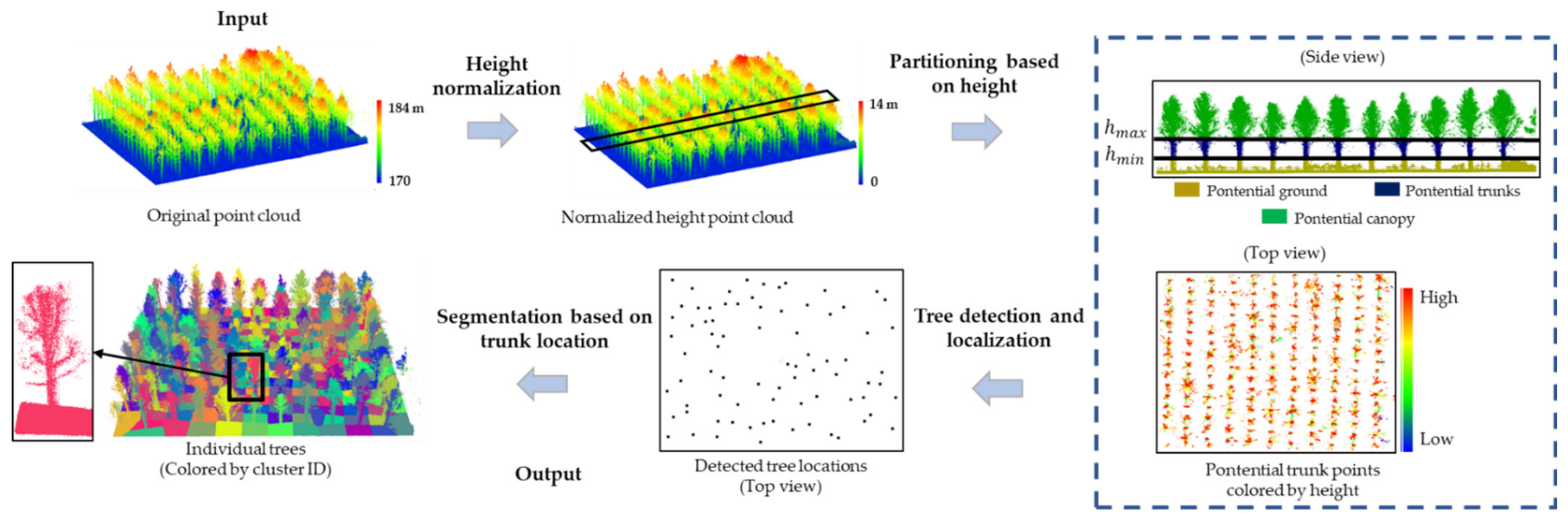
3.1. General Workflow for Tree Detection, Localization, and Segmentation
3.2. Tree Detection and Localization Strategies
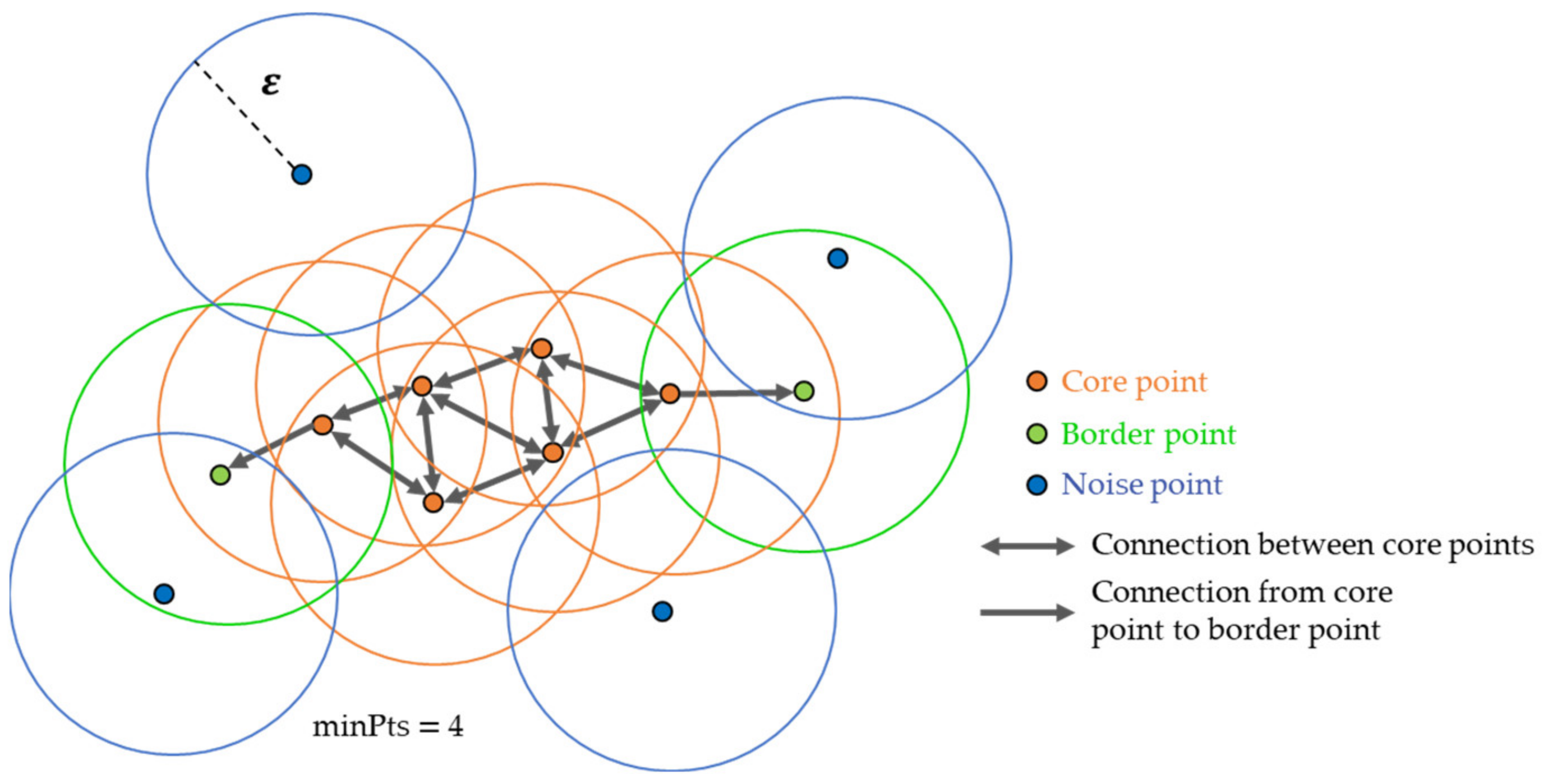
3.2.1. DBSCAN-Based Approach
- Neighborhood distance threshold, : The distance threshold is chosen based on prior knowledge about the diameter of the majority of trees.
- Minimum number of neighboring points, : This parameter is dependent on the 2D point density related to trunks. Visual inspection of the partitioned point clouds and fine-tuning need to be conducted to come up with an appropriate value.
3.2.2. Height/Density-Based Approach
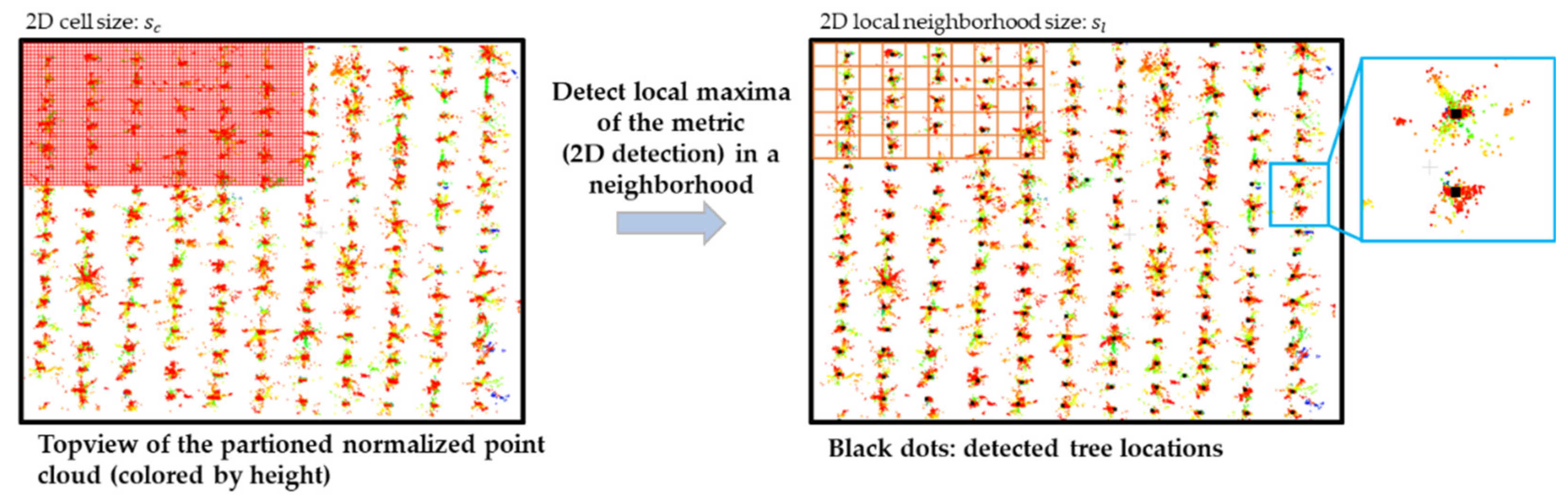
- 2D cell size, : This parameter is chosen based on the knowledge of the level of details/density that can be captured by LiDAR systems on tree trunks. If a small threshold is selected, the derived metrics will be noisy, as there are not enough points to describe a tree trunk in the neighborhood. On the other hand, choosing a large will affect the prediction accuracy of the tree locations.
- 2D local neighborhood size, : Given that only one tree will be detected from a local neighborhood, the size is determined based on prior knowledge related to tree spacing within the ROI.
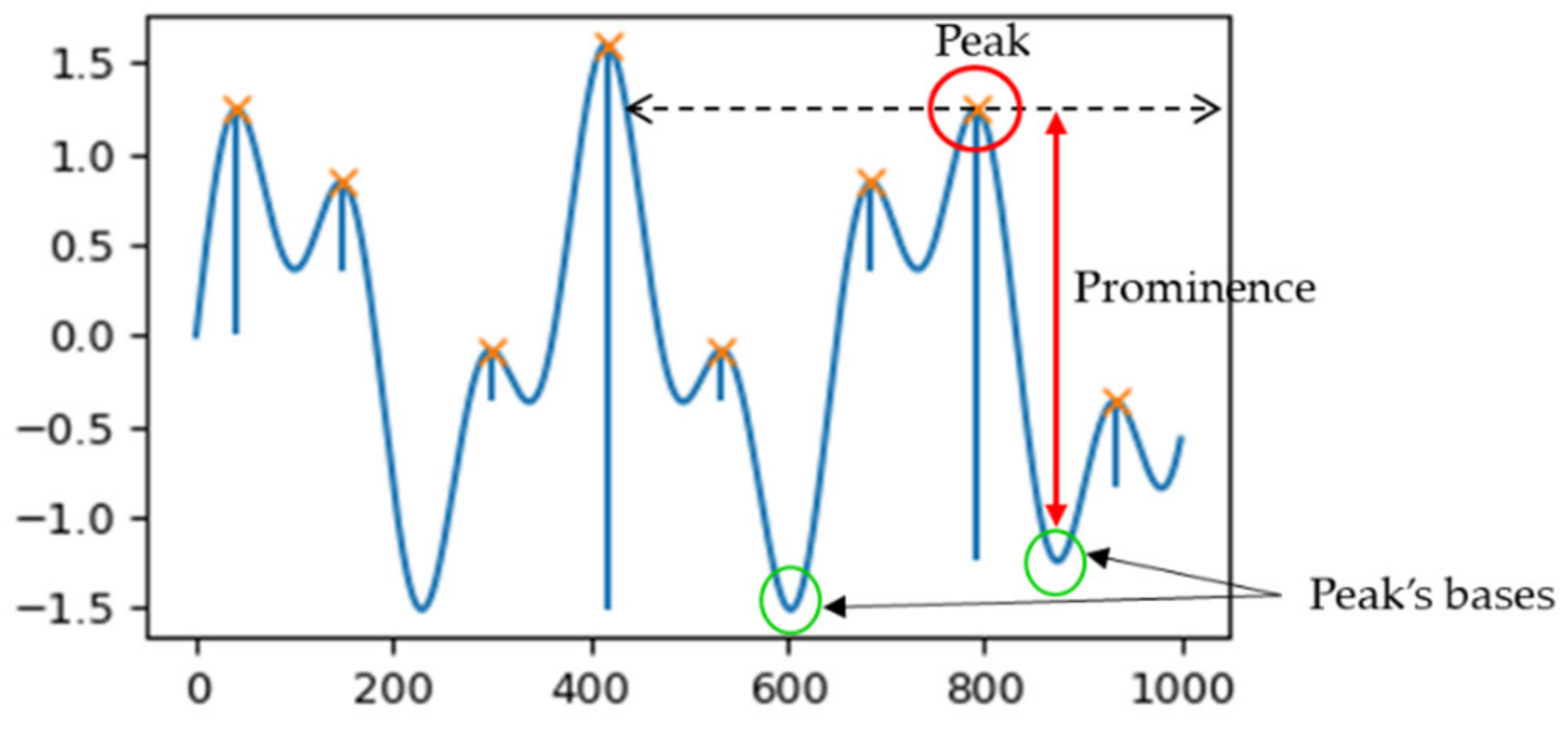
- Minimum prominence, : This parameter needs to be fine-tuned for each dataset since it is related to the 2D point density, which depends on technical factors pertaining to data acquisition, as well as the height range for the hypothesized trunk portion.
3.2.3. Height-Difference-Based Approach
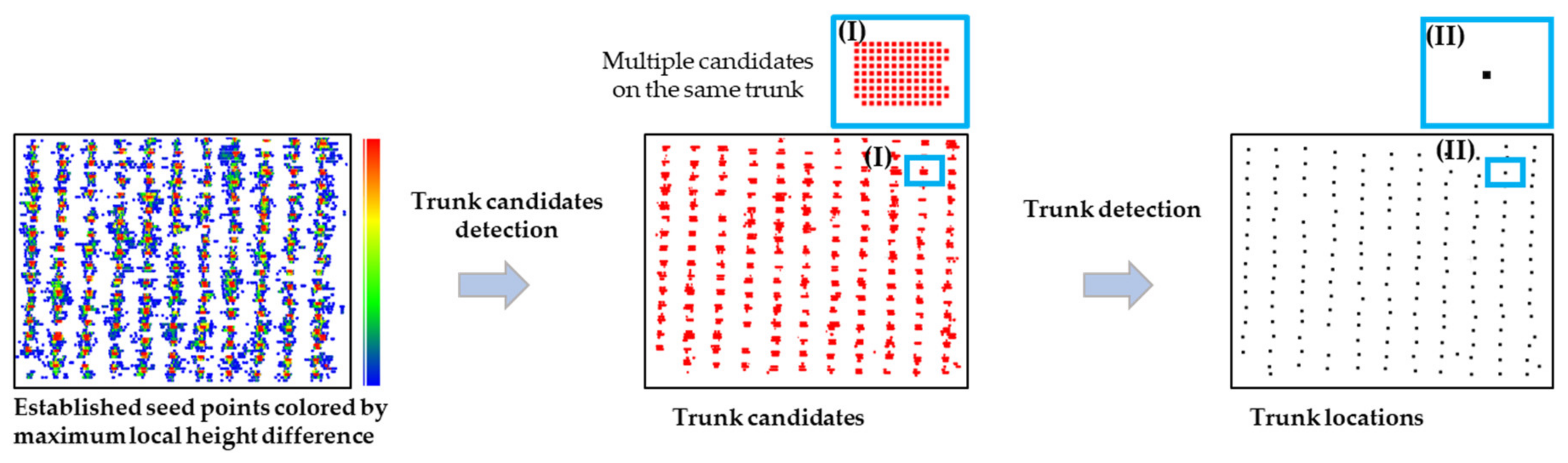
- Spacing between seed points, : The spacing is determined based on the prior knowledge of average tree diameter and the level of details captured by LiDAR systems on tree trunks. This parameter should be small enough to ensure that there are several seed points for a tree trunk. However, choosing a small will result in a longer processing time.
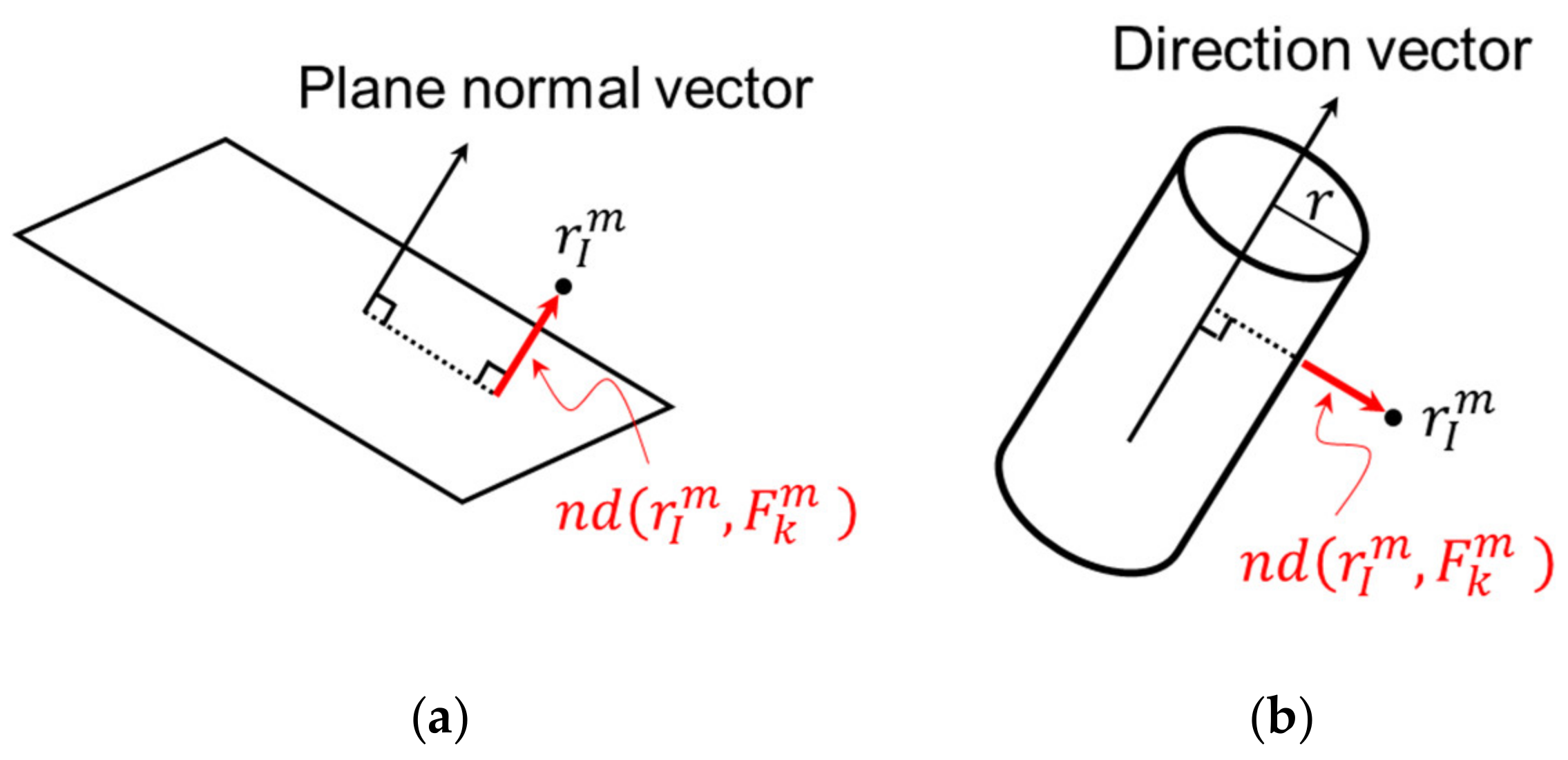
- Cylinder radius, : This parameter also depends on the prior knowledge of average tree diameter and the level of details captured by the LiDAR system on tree trunks. More specifically, is chosen to guarantee that: (i) the cylinder radius is at a similar level to the trunk diameter and (ii) the cylinder contains an adequate number of LiDAR points.
- Minimum height difference value, : This height difference threshold depends on the and values used in the partitioning step. In general, this value can be selected as from 1/2 to 2/3 of .
- Minimum distance between trunks, : This distance is determined based on prior knowledge related to the tree spacing within the ROI.
3.3. UAV System Calibration Using Tree Trunks and Terrain Patches
4. Experimental Results
4.1. System Calibration Results for UAV-2022 Dataset
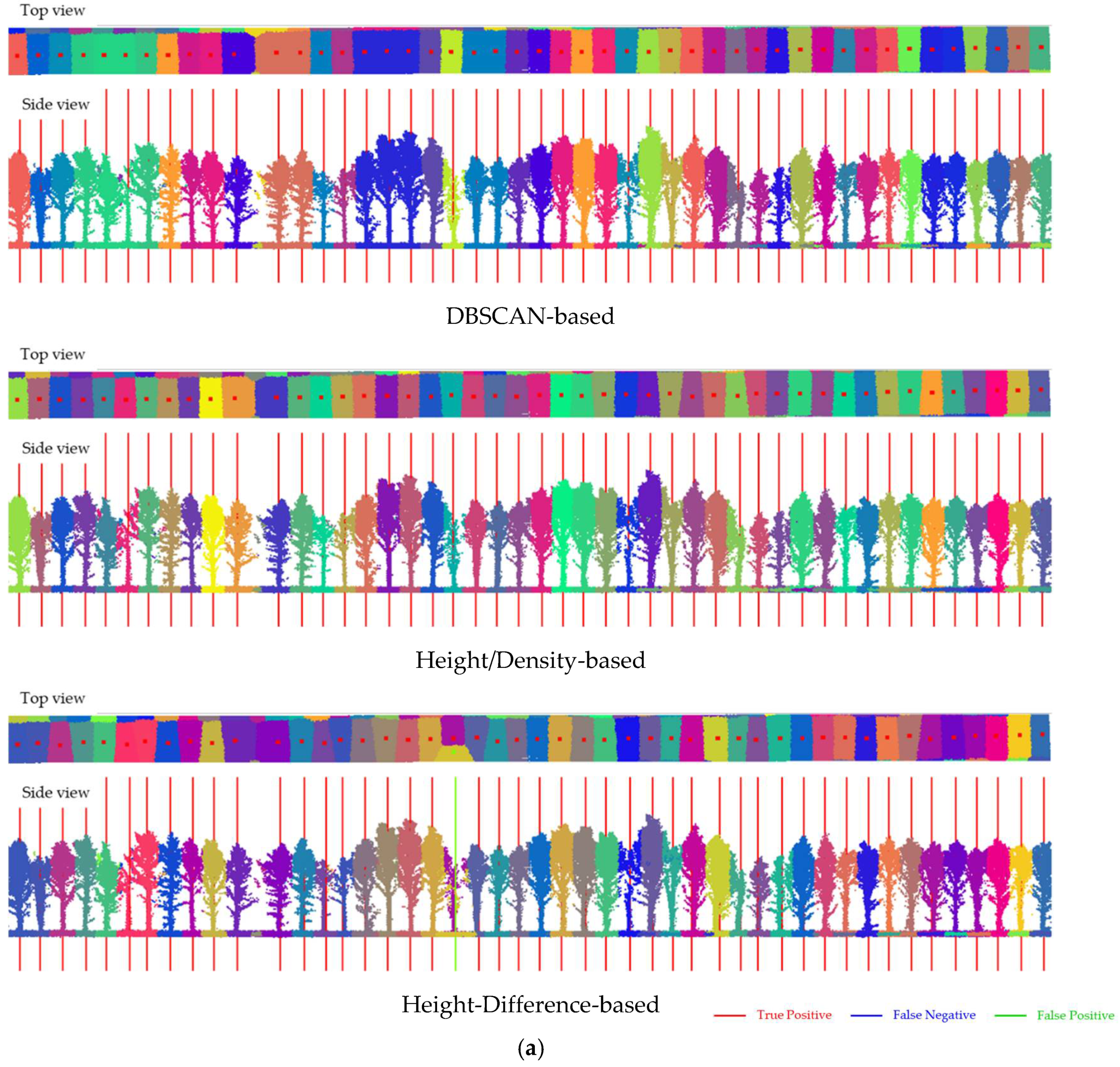
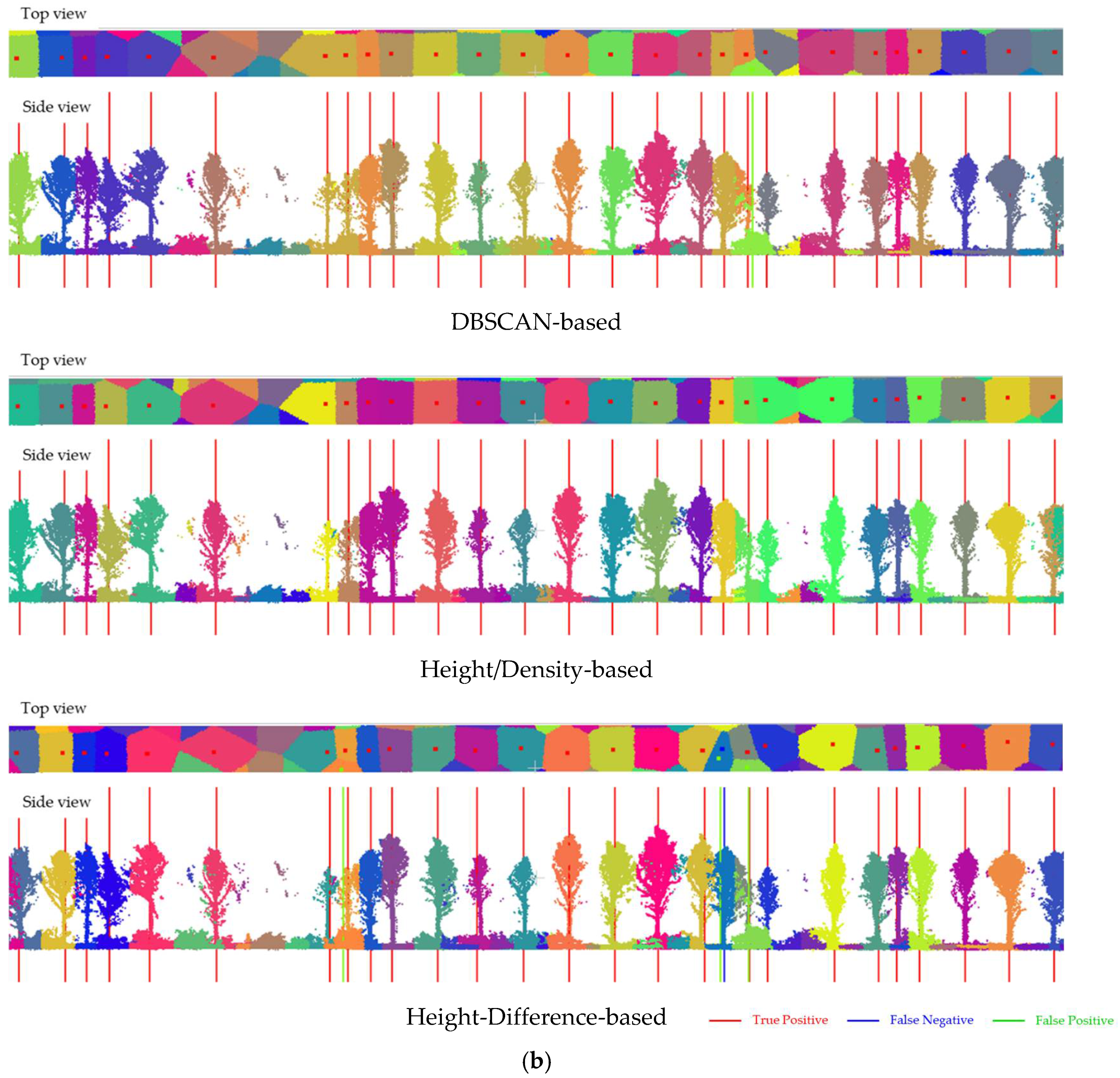
4.2. Comparative Evaluation of Different Tree Detection and Localization Approaches
4.2.1. Impact of Point Density on Tree Detection and Localization
4.2.2. Impact of Geometric Accuracy on Tree Detection and Localization
4.2.3. Impact of Environmental Complexity on Tree Detection and Localization
4.2.4. Processing Time for Tree Detection and Localization Approaches
5. Discussion
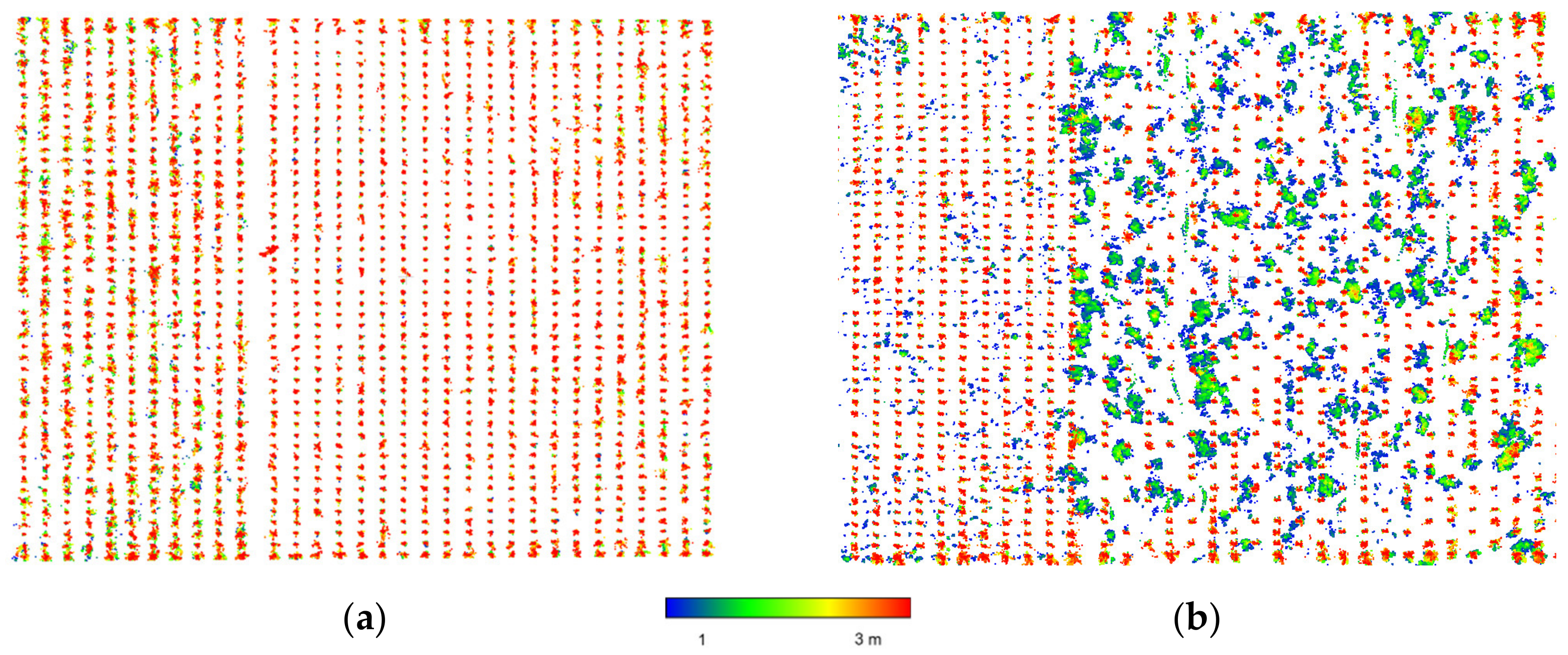
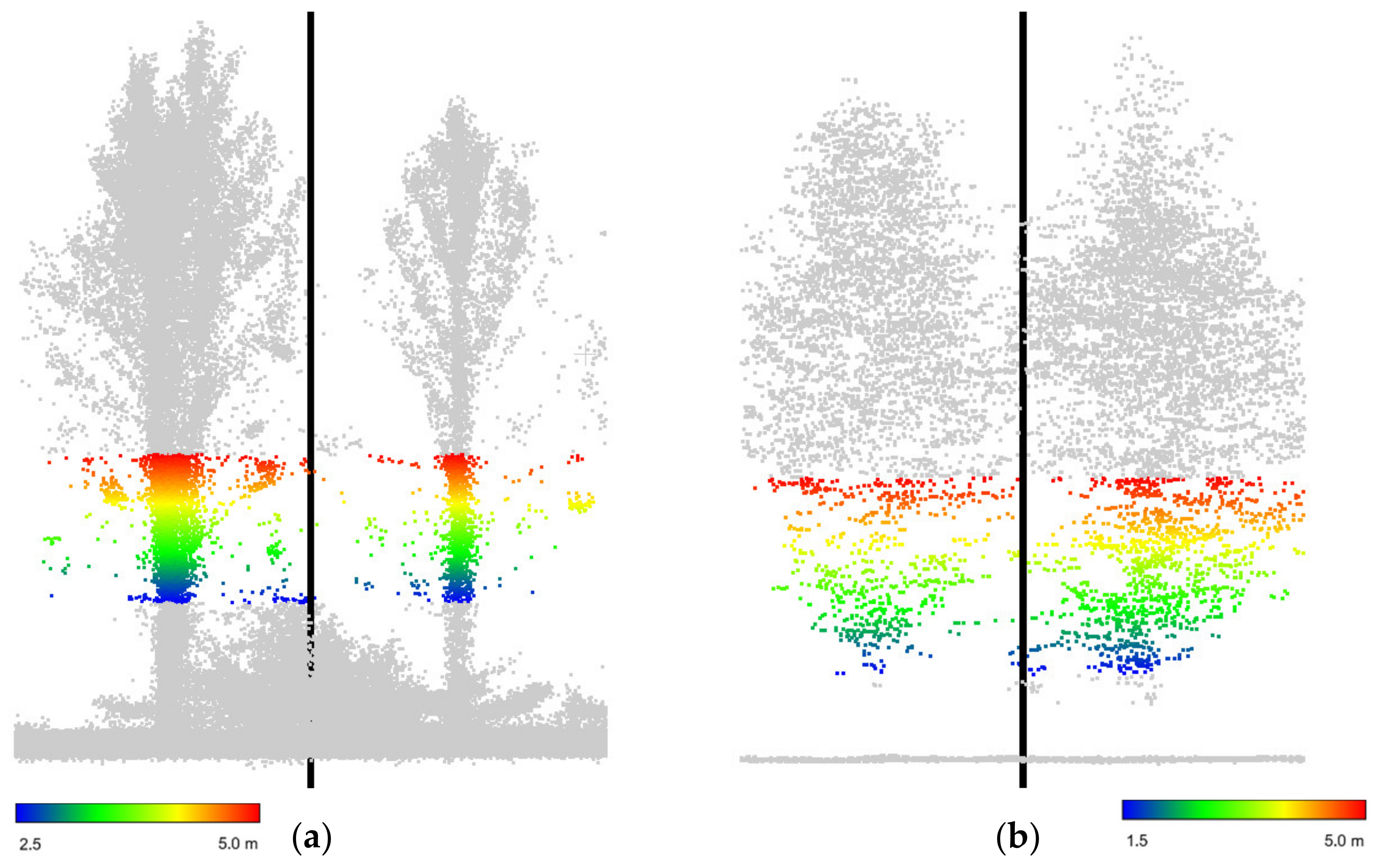
- After fine-tuning the parameters related to DBSCAN-based and height/density-based approaches, comparative tree detection results were achieved from the UAV point clouds with adequate point density—the F1 scores for UAV-2021 and UAV-2022-Low/High-Acc point clouds are higher than 0.99 regardless of the geometric accuracy and environmental complexity. The height-difference-based approach produced similar results to other two approaches when applied on high-density UAV point clouds with slightly more false positives. This is expected since the height-difference-based approach is prone to noise and/or points from other objects such as debris, understory vegetations, and low branches. One sample of detected false positives from UAV-2022-High-Acc is shown in Figure 18a, where points from the debris and low branches resulted in a falsely detected tree.
- In terms of the Geiger-2021 dataset with low point density, the performance of all approaches dramatically deteriorated. Among them, the height-difference-based approach correctly detected the greatest number of trees, followed by the height/density-based and DBSCAN-based approaches. This is expected as the height-difference-based approach does not rely on density information for tree detection. Figure 18b shows a commission error from the Geiger-2021 dataset. It can be observed that points from the branches and noise points between two trees lead to a false positive. By looking into false positive detections as shown in Figure 18, an additional post-processing step (i.e., a quality control process) can be proposed to remove them based on density information and/or by analyzing the vertical spatial distribution of the points within the local neighborhood. Therefore, false positive detections are preferable to false negatives, as the former can be removed relatively easily while finding omission errors is challenging. Overall, although the commission errors are higher than the DBSCAN-based approach, the height-difference-based approach is more suitable for performing tree detection for point clouds with a low point density.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fahey, T.J.; Woodbury, P.B.; Battles, J.J.; Goodale, C.L.; Hamburg, S.P.; Ollinger, S.V.; Woodall, C.W. Forest Carbon Storage: Ecology, Management, and Policy. Front. Ecol. Environ. 2010, 8, 245–252. [Google Scholar] [CrossRef] [Green Version]
- Bettinger, P.; Boston, K.; Siry, J.P.; Grebner, D.L. Forest Management and Planning, 2nd ed.; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Kangas, A.S. Value of Forest Information. Eur. J. For. Res. 2010, 129, 1263–1276. [Google Scholar] [CrossRef]
- West, P.W. Tree and Forest Measurement; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Hoppus, M.L.; Lister, A.J. Measuring Forest Area Loss over Time Using FIA Plots and Satellite Imagerye. Proc. Fourth Annu. For. Inventory Anal. Symp. 2005, 252, 91–97. [Google Scholar]
- Ohmann, J.L.; Gregory, M.J. Predictive Mapping of Forest Composition and Structure with Direct Gradient Analysis and Nearest-Neighbor Imputation in Coastal Oregon, U.S.A. Can. J. For. Res. 2002, 32, 725–741. [Google Scholar] [CrossRef]
- Foody, G.M.; Boyd, D.S.; Cutler, M.E.J. Predictive Relations of Tropical Forest Biomass from Landsat TM Data and Their Transferability between Regions. Remote Sens. Environ. 2003, 85, 463–474. [Google Scholar] [CrossRef]
- Hudak, A.T.; Robichaud, P.R.; Evans, J.B.; Clark, J.; Lannom, K.; Morgan, P.; Stone, C. Field Validation of Burned Area Reflectance Classification (BARC) Products for Post Fire Assessment. Tenth For. Serv. Remote Sens. Appl. Conf. 2004. [Google Scholar]
- Stepper, C.; Straub, C.; Pretzsch, H. Assessing Height Changes in a Highly Structured Forest Using Regularly Acquired Aerial Image Data. Forestry 2014, 88, 304–316. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Wang, L.; Li, X.; Gong, H.; Shi, C.; Zhong, R.; Liu, X. Comparison of UAV and WorldView-2 Imagery for Mapping Leaf Area Index of Mangrove Forest. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 22–31. [Google Scholar] [CrossRef]
- Melin, M.; Korhonen, L.; Kukkonen, M.; Packalen, P. Assessing the Performance of Aerial Image Point Cloud and Spectral Metrics in Predicting Boreal Forest Canopy Cover. ISPRS J. Photogramm. Remote Sens. 2017, 129, 77–85. [Google Scholar] [CrossRef]
- Pearse, G.D.; Dash, J.P.; Persson, H.J.; Watt, M.S. Comparison of High-Density LiDAR and Satellite Photogrammetry for Forest Inventory. ISPRS J. Photogramm. Remote Sens. 2018, 142, 257–267. [Google Scholar] [CrossRef]
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Springer: Berlin/Heidelberg, Germany, 2014; Volume 27. [Google Scholar]
- Farid, A.; Goodrich, D.C.; Bryant, R.; Sorooshian, S. Using Airborne Lidar to Predict Leaf Area Index in Cottonwood Trees and Refine Riparian Water-Use Estimates. J. Arid. Environ. 2008, 72, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Tian, L.; Qu, Y.; Qi, J. Estimation of Forest Lai Using Discrete Airborne Lidar: A Review. Remote Sens. 2021, 13, 2408. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground Filtering Algorithms for Airborne LiDAR Data: A Review of Critical Issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Gao, B.; Devereux, B. State-of-the-Art: DTM Generation Using Airborne LIDAR Data. Sensors 2017, 17, 150. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Michałowska, M.; Rapiński, J. A Review of Tree Species Classification Based on Airborne Lidar Data and Applied Classifiers. Remote Sens. 2021, 13, 353. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Pitkänen, J.; Hyyppä, J.; Vehmas, M. Estimation of Timber Volume and Stem Density Based on Scanning Laser Altimetry and Expected Tree Size Distribution Functions. Remote Sens. Environ. 2004, 90, 319–330. [Google Scholar] [CrossRef]
- Packalen, P.; Vauhkonen, J.; Kallio, E.; Peuhkurinen, J.; Pitkänen, J.; Pippuri, I.; Strunk, J.; Maltamo, M. Predicting the Spatial Pattern of Trees by Airborne Laser Scanning. Int. J. Remote Sens. 2013, 34, 5154–5165. [Google Scholar] [CrossRef]
- Hyde, P.; Dubayah, R.; Peterson, B.; Blair, J.B.; Hofton, M.; Hunsaker, C.; Knox, R.; Walker, W. Mapping Forest Structure for Wildlife Habitat Analysis Using Waveform Lidar: Validation of Montane Ecosystems. Remote Sens. Environ. 2005, 96, 427–437. [Google Scholar] [CrossRef]
- Swatantran, A.; Dubayah, R.; Roberts, D.; Hofton, M.; Blair, J.B. Mapping Biomass and Stress in the Sierra Nevada Using Lidar and Hyperspectral Data Fusion. Remote Sens. Environ. 2011, 115, 2917–2930. [Google Scholar] [CrossRef] [Green Version]
- Lindberg, E.; Holmgren, J. Individual Tree Crown Methods for 3D Data from Remote Sensing. Curr. For. Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Kukko, A.; Kaartinen, H.; Wang, Y.; Liang, X.; Matikainen, L.; Hyyppä, J. Comparing Features of Single and Multi-Photon Lidar in Boreal Forests. ISPRS J. Photogramm. Remote Sens. 2020, 168, 268–276. [Google Scholar] [CrossRef]
- Brede, B.; Lau, A.; Bartholomeus, H.M.; Kooistra, L. Comparing RIEGL RiCOPTER UAV LiDAR Derived Canopy Height and DBH with Terrestrial LiDAR. Sensors 2017, 17, 2371. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Estimating Forest Structural Attributes Using UAV-LiDAR Data in Ginkgo Plantations. ISPRS J. Photogramm. Remote Sens. 2018, 146, 465–482. [Google Scholar] [CrossRef]
- Corte, A.P.D.; Souza, D.V.; Rex, F.E.; Sanquetta, C.R.; Mohan, M.; Silva, C.A.; Zambrano, A.M.A.; Prata, G.; Alves de Almeida, D.R.; Trautenmüller, J.W.; et al. Forest Inventory with High-Density UAV-Lidar: Machine Learning Approaches for Predicting Individual Tree Attributes. Comput. Electron. Agric. 2020, 179, 2787. [Google Scholar] [CrossRef]
- Chen, Q.; Gao, T.; Zhu, J.; Wu, F.; Li, X.; Lu, D.; Yu, F. Individual Tree Segmentation and Tree Height Estimation Using Leaf-Off and Leaf-On UAV-LiDAR Data in Dense Deciduous Forests. Remote Sens. 2022, 14, 2787. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Burt, A.; Disney, M.I.; Raumonen, P.; Armston, J.; Calders, K.; Lewis, P. Rapid characterisation of forest structure from TLS and 3D modelling. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Houston, TX, USA, 26–29 May 2013. [Google Scholar]
- Heinzel, J.; Huber, M.O. Detecting Tree Stems from Volumetric TLS Data in Forest Environments with Rich Understory. Remote Sens. 2017, 9, 9. [Google Scholar] [CrossRef] [Green Version]
- Comesaña-Cebral, L.; Martínez-Sánchez, J.; Lorenzo, H.; Arias, P. Individual Tree Segmentation Method Based on Mobile Backpack LiDAR Point Clouds. Sensors 2021, 21, 6007. [Google Scholar] [CrossRef]
- Ko, C.; Lee, S.; Yim, J.; Kim, D.; Kang, J. Comparison of Forest Inventory Methods at Plot-Level between a Backpack Personal Laser Scanning (BPLS) and Conventional Equipment in Jeju Island, South Korea. Forests 2021, 12, 308. [Google Scholar] [CrossRef]
- Potapov, P.; Li, X.; Hernandez-Serna, A.; Tyukavina, A.; Hansen, M.C.; Kommareddy, A.; Pickens, A.; Turubanova, S.; Tang, H.; Silva, C.E.; et al. Mapping global forest canopy height through integration of GEDI and Landsat data. Remote Sens. Environ. 2020, 253, 112165. [Google Scholar] [CrossRef]
- Zhao, D.; Pang, Y.; Li, Z.; Liu, L. Isolating individual trees in a closed coniferous forest using small footprint lidar data. Int. J. Remote Sens. 2014, 35, 7199–7218. [Google Scholar] [CrossRef]
- Hilker, T.; Coops, N.C.; Newnham, G.J.; van Leeuwen, M.; Wulder, M.A.; Stewart, J.; Culvenor, D.S. Comparison of Terrestrial and Airborne LiDAR in Describing Stand Structure of a Thinned Lodgepole Pine Forest. J. For. 2012, 110, 97–104. [Google Scholar] [CrossRef]
- LaRue, E.; Wagner, F.; Fei, S.; Atkins, J.; Fahey, R.; Gough, C.; Hardiman, B. Compatibility of Aerial and Terrestrial LiDAR for Quantifying Forest Structural Diversity. Remote Sens. 2020, 12, 1407. [Google Scholar] [CrossRef]
- Babbel, B.J.; Olsen, M.J.; Che, E.; Leshchinsky, B.A.; Simpson, C.; Dafni, J. Evaluation of Uncrewed Aircraft Systems’ Lidar Data Quality. ISPRS Int. J. Geo-Inform. 2019, 8, 532. [Google Scholar] [CrossRef] [Green Version]
- Morsdorf, F.; Eck, C.; Zgraggen, C.; Imbach, B.; Schneider, F.D.; Kükenbrink, D. UAV-based LiDAR acquisition for the derivation of high-resolution forest and ground information. Geophysics 2017, 36, 566–570. [Google Scholar] [CrossRef]
- Hyyppä, E.; Yu, X.; Kaartinen, H.; Hakala, T.; Kukko, A.; Vastaranta, M.; Hyyppä, J. Comparison of Backpack, Handheld, Under-Canopy UAV, and Above-Canopy UAV Laser Scanning for Field Reference Data Collection in Boreal Forests. Remote Sens. 2020, 12, 3327. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Shao, J.; Shin, S.-Y.; Saka, Z.; Joseph, M.; Manish, R.; Fei, S.; Habib, A. Comparative Analysis of Multi-Platform, Multi-Resolution, Multi-Temporal LiDAR Data for Forest Inventory. Remote Sens. 2022, 14, 649. [Google Scholar] [CrossRef]
- Crespo-Peremarch, P.; Fournier, R.A.; Nguyen, V.-T.; van Lier, O.R.; Ruiz, L.Á. A comparative assessment of the vertical distribution of forest components using full-waveform airborne, discrete airborne and discrete terrestrial laser scanning data. For. Ecol. Manag. 2020, 473, 118268. [Google Scholar] [CrossRef]
- Hyyppa, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3-D tree height models produced by laser scanners. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Popescu, S.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of Individual Tree Crowns in Airborne Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Baldocchi, D.; Gong, P.; Kelly, M. Isolating Individual Trees in a Savanna Woodland Using Small Footprint Lidar Data. Photogramm. Eng. Remote Sens. 2006, 72, 923–932. [Google Scholar] [CrossRef] [Green Version]
- Jeronimo, S.M.A.; Kane, V.R.; Churchill, D.J.; McGaughey, R.J.; Franklin, J.F. Applying LiDAR Individual Tree Detection to Management of Structurally Diverse Forest Landscapes. J. For. 2018, 116, 336–346. [Google Scholar] [CrossRef] [Green Version]
- Yun, T.; Jiang, K.; Li, G.; Eichhorn, M.P.; Fan, J.; Liu, F.; Chen, B.; An, F.; Cao, L. Individual tree crown segmentation from airborne LiDAR data using a novel Gaussian filter and energy function minimization-based approach. Remote Sens. Environ. 2021, 256, 112307. [Google Scholar] [CrossRef]
- Shao, G.; Shao, G.; Fei, S. Delineation of individual deciduous trees in plantations with low-density LiDAR data. Int. J. Remote Sens. 2018, 40, 346–363. [Google Scholar] [CrossRef]
- Li, W.; Guo, Q.; Jakubowski, M.K.; Kelly, M. A New Method for Segmenting Individual Trees from the Lidar Point Cloud. Photogramm. Eng. Remote Sens. 2012, 78, 75–84. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.-C.; Liu, J.; Fei, S.; Habib, A. Leaf-Off and Leaf-On UAV LiDAR Surveys for Single-Tree Inventory in Forest Plantations. Drones 2021, 5, 115. [Google Scholar] [CrossRef]
- Lu, X.; Guo, Q.; Li, W.; Flanagan, J. A bottom-up approach to segment individual deciduous trees using leaf-off lidar point cloud data. ISPRS J. Photogramm. Remote Sens. 2014, 94, 1–12. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef] [Green Version]
- Hyyppä, E.; Hyyppä, J.; Hakala, T.; Kukko, A.; Wulder, M.A.; White, J.C.; Pyörälä, J.; Yu, X.; Wang, Y.; Virtanen, J.-P.; et al. Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J. Photogramm. Remote Sens. 2020, 164, 41–60. [Google Scholar] [CrossRef]
- Fu, H.; Li, H.; Dong, Y.; Xu, F.; Chen, F. Segmenting Individual Tree from TLS Point Clouds Using Improved DBSCAN. Forests 2022, 13, 566. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, J.; Dong, P.; Ma, W.; Liu, Y.; Liu, Q.; Zhang, Z. Tree stem extraction from TLS point-cloud data of natural forests based on geometric features and DBSCAN. Geocarto Int. 2022, 1–15. [Google Scholar] [CrossRef]
- Velodyne VLP-32C User Manual. Available online: https://icave2.cse.buffalo.edu/resources/sensor-modeling/VLP32CManual.pdf (accessed on 8 June 2022).
- Applanix APX-15 UAV Datasheet. Available online: https://www.applanix.com/downloads/products/specs/APX15_UAV.pdf (accessed on 25 April 2020).
- Ravi, R.; Lin, Y.-J.; Elbahnasawy, M.; Shamseldin, T.; Habib, A. Simultaneous System Calibration of a Multi-LiDAR Multicamera Mobile Mapping Platform. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1694–1714. [Google Scholar] [CrossRef]
- Habib, A.; Lay, J.; Wong, C. LIDAR Error Propagation Calculator. Available online: https://engineering.purdue.edu/CE/Academics/Groups/Geomatics/DPRG/files/LIDARErrorPropagation.zip (accessed on 9 October 2021).
- Clifton, W.E.; Steele, B.; Nelson, G.; Truscott, A.; Itzler, M.; Entwistle, M. Medium altitude airborne geiger-mode mapping LIDAR system. In Laser Radar Technology and Applications XX; and Atmospheric Propagation XII; SPIE: Bellingham, WA, USA, 2015; Volume 9465. [Google Scholar]
- Ullrich, A.; Pfennigbauer, M. Linear LIDAR versus Geiger-mode LIDAR: Impact on data properties and data quality. In Laser Radar Technology and Applications XXI; SPIE: Bellingham, WA, USA, 2016; Volume 9832. [Google Scholar] [CrossRef]
- Stoker, J.M.; Abdullah, Q.A.; Nayegandhi, A.; Winehouse, J. Evaluation of Single Photon and Geiger Mode Lidar for the 3D Elevation Program. Remote Sens. 2016, 8, 767. [Google Scholar] [CrossRef] [Green Version]
- VeriDaaS Geiger-Mode LiDAR. Available online: https://veridaas.com/geiger-mode-lidar (accessed on 8 June 2022).
- Lin, Y.-C.; Manish, R.; Bullock, D.; Habib, A. Comparative Analysis of Different Mobile LiDAR Mapping Systems for Ditch Line Characterization. Remote Sens. 2021, 13, 2485. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996. [Google Scholar]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN Revisited, Revisited. ACM Trans. Database Syst. 2017, 42, 19. [Google Scholar] [CrossRef]
- Wold, S.; Esbensen, K.; Geladi, P. Principal component analysis. Chemom. Intell. Lab. Syst. 1987, 2, 37–52. [Google Scholar] [CrossRef]
- Ravi, R.; Lin, Y.-J.; Elbahnasawy, M.; Shamseldin, T.; Habib, A. Bias Impact Analysis and Calibration of Terrestrial Mobile LiDAR System with Several Spinning Multibeam Laser Scanners. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5261–5275. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mounting Parameters | ||||||
|---|---|---|---|---|---|---|
| Initial | 1.261 | −0.276 | 0.129 | −0.115 | 0.022 | 0.100 |
| Refined | 1.217 ±0.001 | −0.307 ±0.001 | −0.121 ±0.002 | −0.101 ±0.001 | 0.024 ±0.001 | N\A |
| Number of Features | Number of Points | Before Calibration | After Calibration | |||||
|---|---|---|---|---|---|---|---|---|
| Mean (m) | STD (m) | RMSE (m) | Mean (m) | STD (m) | RMSE (m) | |||
| Tree Trunks | 406 | ~196,000 | 0.094 | 0.128 | 0.159 | 0.061 | 0.063 | 0.088 |
| Terrain Patches | 3095 | ~19,847,000 | 0.076 | 0.089 | 0.117 | 0.039 | 0.042 | 0.057 |
| Parameters/Thresholds | UAV-2021 | Geiger-2021 | UAV-2022-Low/High-Acc | |
|---|---|---|---|---|
| DBSCAN-Based | 1.0 | 1.0 | 2.0 | |
| 3.0 | 3.0 | 3.5 | ||
| 0.5 | 0.5 | 0.5 | ||
| 100 | 7 | 80 | ||
| Height/Density-based | 1.0 | 1.0 | 2.0 | |
| 3.0 | 3.0 | 3.5 | ||
| 0.1 | 0.1 | 0.1 | ||
| 2.0 | 2.0 | 2.0 | ||
| 11.5 | 2.0 | 10.0 | ||
| Height-Difference-based | 1.5 | 1.5 | 2.5 | |
| 5.0 | 5.0 | 5.0 | ||
| 0.1 | 0.1 | 0.1 | ||
| 0.2 | 0.2 | 0.2 | ||
| 2.0 | 2.0 | 1.5 | ||
| 1.0 | 1.0 | 1.0 | ||
| UAV-2021 | ||||||||
| NRD | NDT | TP | FN | FP | Precision | Recall | F1 score | |
| DBSCAN | 1504 | 1502 | 1499 | 5 | 3 | 0.998 | 0.997 | 0.997 |
| Height/Density | 1505 | 1502 | 2 | 3 | 0.998 | 0.999 | 0.998 | |
| Height-Difference | 1514 | 1501 | 3 | 13 | 0.991 | 0.998 | 0.995 | |
| Geiger-2021 | ||||||||
| NRD | NDT | TP | FN | FP | Precision | Recall | F1 score | |
| DBSCAN | 1504 | 1255 | 1114 | 390 | 141 | 0.888 | 0.741 | 0.808 |
| Height/Density | 1816 | 1238 | 266 | 578 | 0.682 | 0.823 | 0.746 | |
| Height-Difference | 1617 | 1408 | 96 | 209 | 0.871 | 0.936 | 0.902 | |
| UAV-2021 | Geiger-2021 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DBSCAN | 0.007 | −0.004 | 0.086 | 0.075 | 0.086 | 0.075 | −0.220 | 0.035 | 0.261 | 0.274 | 0.341 | 0.276 |
| Height/Density | 0.011 | 0.002 | 0.090 | 0.077 | 0.091 | 0.077 | −0.175 | 0.035 | 0.291 | 0.253 | 0.339 | 0.256 |
| Height-Difference | 0.004 | 0.000 | 0.177 | 0.212 | 0.177 | 0.212 | −0.226 | 0.063 | 0.249 | 0.254 | 0.336 | 0.262 |
| UAV-2022-Low-Acc | ||||||||
| NRD | NDT | TP | FN | FP | Precision | Recall | F1 score | |
| DBSCAN | 1121 | 1121 | 1111 | 10 | 10 | 0.991 | 0.991 | 0.991 |
| Height/Density | 1109 | 1104 | 17 | 5 | 0.996 | 0.985 | 0.990 | |
| Height-Difference | 1143 | 1116 | 5 | 27 | 0.976 | 0.996 | 0.986 | |
| UAV-2022-High-Acc | ||||||||
| NRD | NDT | TP | FN | FP | Precision | Recall | F1 score | |
| DBSCAN | 1121 | 1123 | 1113 | 8 | 10 | 0.991 | 0.993 | 0.992 |
| Height/Density | 1123 | 1116 | 5 | 7 | 0.994 | 0.996 | 0.995 | |
| Height-Difference | 1140 | 1117 | 4 | 23 | 0.980 | 0.996 | 0.988 | |
| UAV-2022-Low-Acc | UAV-2022-High-Acc | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DBSCAN | 0.004 | −0.001 | 0.186 | 0.084 | 0.186 | 0.084 | 0.008 | −0.006 | 0.098 | 0.089 | 0.098 | 0.089 |
| Height/Density | 0.034 | −0.010 | 0.190 | 0.093 | 0.193 | 0.094 | 0.031 | −0.010 | 0.094 | 0.087 | 0.099 | 0.088 |
| Height-Difference | 0.002 | −0.006 | 0.292 | 0.212 | 0.292 | 0.212 | 0.005 | −0.002 | 0.175 | 0.197 | 0.175 | 0.197 |
| UAV-2021 | ||||||||
| NRD | NDT | TP | FN | FP | Precision | Recall | F1 score | |
| DBSCAN | 1504 | 1502 | 1499 | 5 | 3 | 0.998 | 0.997 | 0.997 |
| Height/Density | 1505 | 1502 | 2 | 3 | 0.998 | 0.999 | 0.998 | |
| Height-Difference | 1514 | 1501 | 3 | 13 | 0.991 | 0.998 | 0.995 | |
| UAV-2022-High-Acc | ||||||||
| NRD | NDT | TP | FN | FP | Precision | Recall | F1 score | |
| DBSCAN | 1121 | 1123 | 1113 | 8 | 10 | 0.991 | 0.993 | 0.992 |
| Height/Density | 1123 | 1116 | 5 | 7 | 0.994 | 0.996 | 0.995 | |
| Height-Difference | 1140 | 1117 | 4 | 23 | 0.980 | 0.996 | 0.988 | |
| UAV-2021 | UAV-2022-High-Acc | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DBSCAN | 0.007 | −0.004 | 0.086 | 0.075 | 0.086 | 0.075 | 0.008 | −0.006 | 0.098 | 0.089 | 0.098 | 0.089 |
| Height/Density | 0.011 | 0.002 | 0.090 | 0.077 | 0.091 | 0.077 | 0.031 | −0.010 | 0.094 | 0.087 | 0.099 | 0.088 |
| Height-Difference | 0.004 | 0.000 | 0.177 | 0.212 | 0.177 | 0.212 | 0.005 | −0.002 | 0.175 | 0.197 | 0.175 | 0.197 |
| Dataset | Approach | Number of Points (Million) | Processing Time (s) |
|---|---|---|---|
| UAV-2021 | DBSCAN | 1.7 | 439.0 |
| Height/Density | 1.7 | 21.6 | |
| Height-Difference | 3.7 | 69.1 | |
| UAV-2022-High-Acc | DBSCAN | 1.1 | 41.1 |
| Height/Density | 1.1 | 15.0 | |
| Height-Difference | 2.0 | 51.9 | |
| Geiger-2021 | DBSCAN | 0.3 | 3.9 |
| Height/Density | 0.3 | 5.8 | |
| Height-Difference | 0.8 | 39.1 |
| Strategies | Processing Time | Point Density | Geometric Accuracy | Debris | |||
|---|---|---|---|---|---|---|---|
| Det. | Loc. | Det. | Loc. | Det. | Loc. | ||
| DBSCAN | Medium–Slow | ✓✓ | ✓✓ | ✓ | ✓✓ | ✓ | ✗ |
| Height/Density | Fast | ✓✓ | ✓✓ | ✗ | ✓✓ | ✓ | ✗ |
| Height-Difference | Medium–Slow | ✓✓ | ✓ | ✗ | ✓✓ | ✓ | ✗ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, T.; dos Santos, R.C.; Liu, J.; Lin, Y.-C.; Fei, W.C.; Fei, S.; Habib, A. Comparative Evaluation of a Newly Developed Trunk-Based Tree Detection/Localization Strategy on Leaf-Off LiDAR Point Clouds with Varying Characteristics. Remote Sens. 2022, 14, 3738. https://doi.org/10.3390/rs14153738
Zhou T, dos Santos RC, Liu J, Lin Y-C, Fei WC, Fei S, Habib A. Comparative Evaluation of a Newly Developed Trunk-Based Tree Detection/Localization Strategy on Leaf-Off LiDAR Point Clouds with Varying Characteristics. Remote Sensing. 2022; 14(15):3738. https://doi.org/10.3390/rs14153738
Chicago/Turabian StyleZhou, Tian, Renato César dos Santos, Jidong Liu, Yi-Chun Lin, William Changhao Fei, Songlin Fei, and Ayman Habib. 2022. "Comparative Evaluation of a Newly Developed Trunk-Based Tree Detection/Localization Strategy on Leaf-Off LiDAR Point Clouds with Varying Characteristics" Remote Sensing 14, no. 15: 3738. https://doi.org/10.3390/rs14153738
APA StyleZhou, T., dos Santos, R. C., Liu, J., Lin, Y. -C., Fei, W. C., Fei, S., & Habib, A. (2022). Comparative Evaluation of a Newly Developed Trunk-Based Tree Detection/Localization Strategy on Leaf-Off LiDAR Point Clouds with Varying Characteristics. Remote Sensing, 14(15), 3738. https://doi.org/10.3390/rs14153738