

Detection and Identification of Mesoscale Eddies in the South China Sea Based on an Artificial Neural Network Model—YOLOF and Remotely Sensed Data
Abstract
:1. Introduction
2. Study Area and Data
3. Methods
- (1)
- In the shape inspection, the shape error was ≤ 55%, where the shape error E was calculated using the following formula:where is the area of the closed contour, is the area of the contour-fitting circle, and is the overlapping area between and ;
- (2)
- A certain number of pixels i were included, satisfying 8 ≤ i ≤ 1000;
- (3)
- Only pixels with SLA values above (below) the current SLA interval value for anticyclonic (cyclonic) eddies were contained;
- (4)
- For cyclonic eddies (anticyclonic eddies), there was at most one SLA minimum (maximum);
- (5)
- Considering the error of the data, the amplitude A of the eddy had to meet 1 ≤ A ≤ 150 cm, where A is defined as the absolute value of the difference between the SLA value of the outermost contour and the extreme value in the contour.
4. Results and Discussion
4.1. Detection Results of YOLOF Model
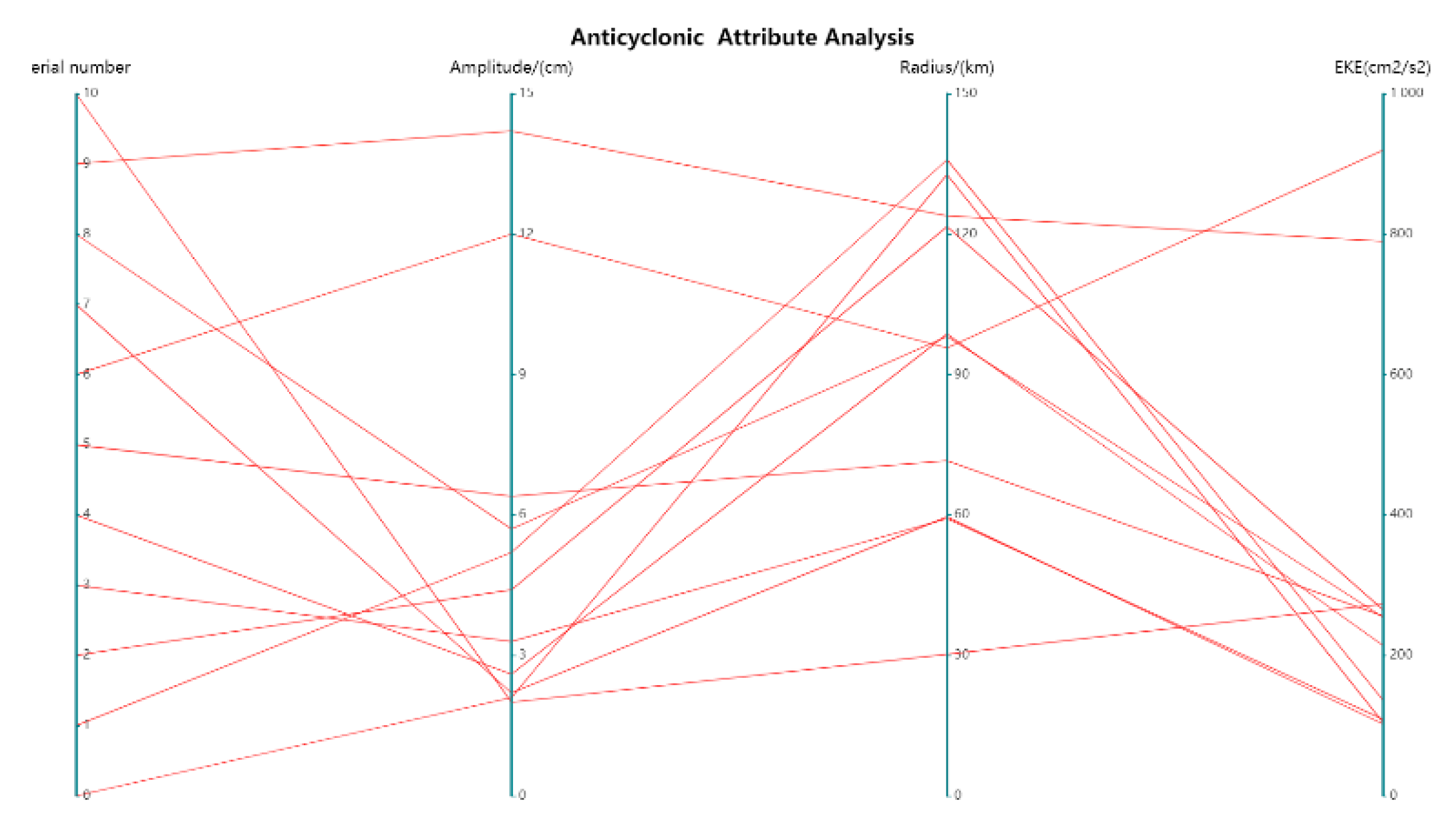
4.2. Analysis of Mesoscale Eddy Parameters
- (1)
- The radius (R) of the eddy was analyzed. The shape of a mesoscale eddy was typically irregular. In this paper, the average geographical distance between the eddy center and the outermost of the four fields was considered as the radius (R) of the mesoscale eddy, using the following formula:
- (2)
- The amplitude (A) of the eddy was also analyzed; it refers to the absolute value of the height difference between the extreme value of the SLA in the eddy center and the SLA around the effective contour defining the eddy edge, as determined by the following formula:
- (3)
- We analyzed the eddy kinetic energy (EKE), as generally high kinetic energy can be observed in ocean areas with strong mesoscale eddy activity. The calculation formula under the geostrophic assumption is as follows (u and v were introduced in Section 3):
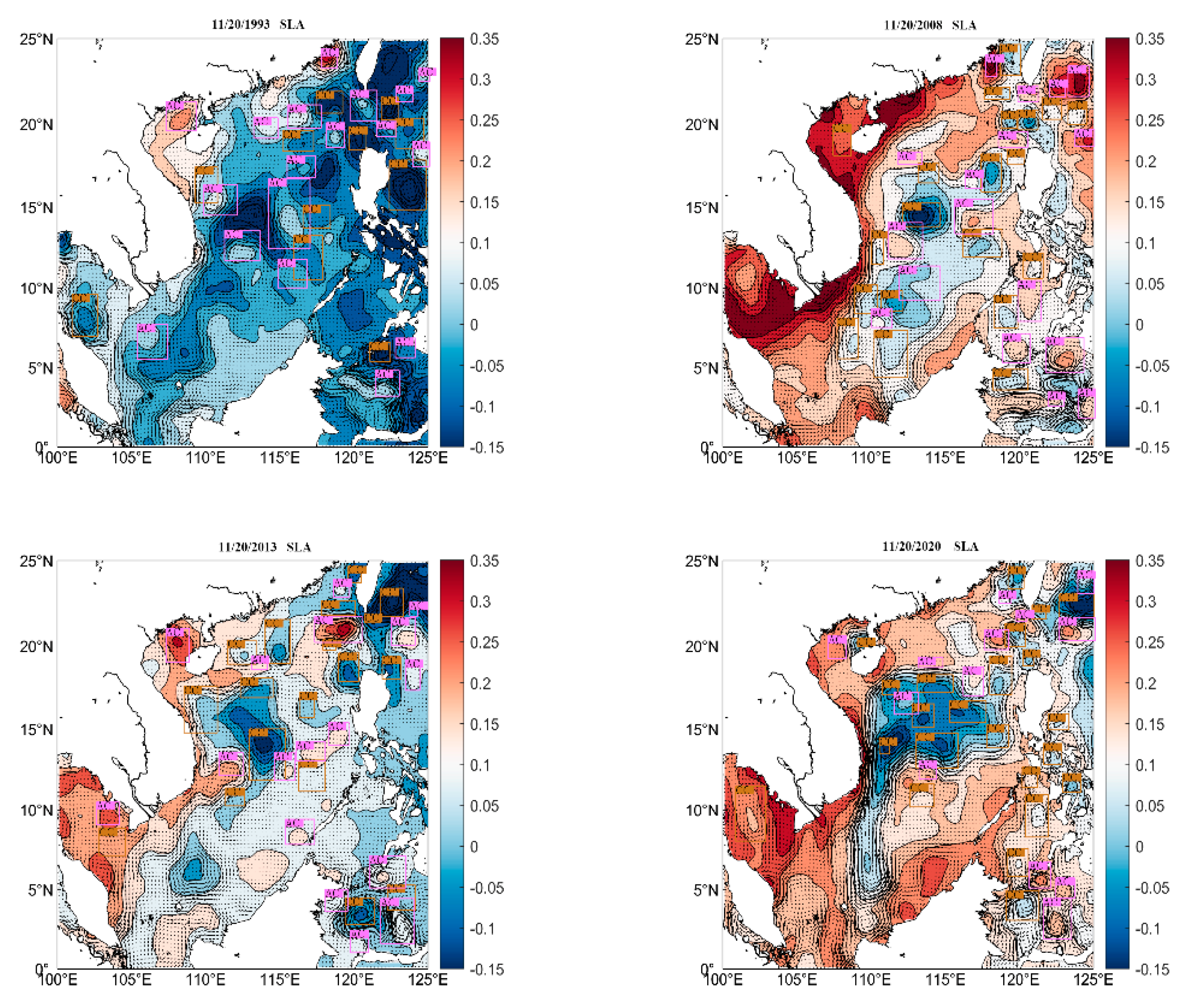
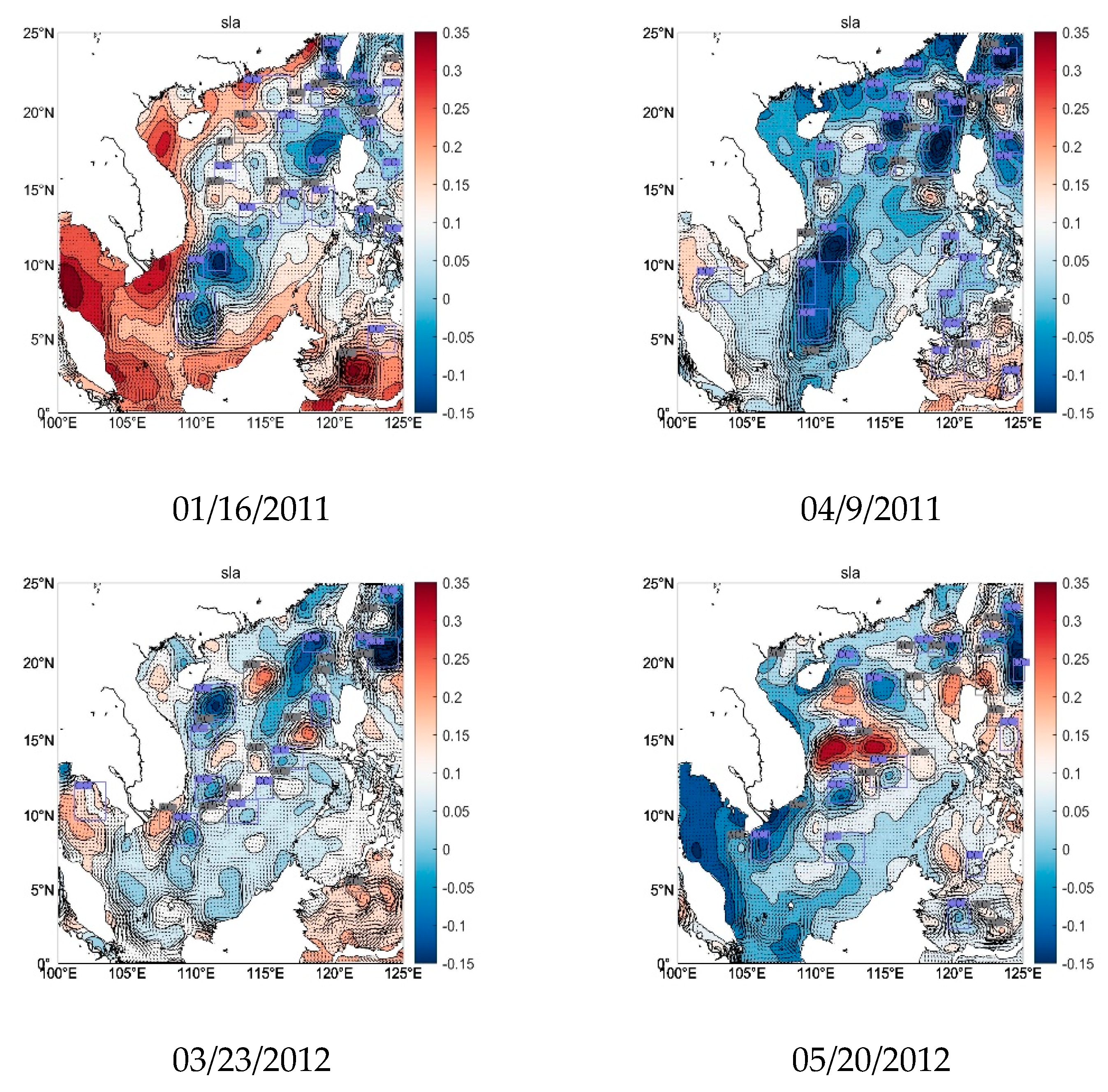
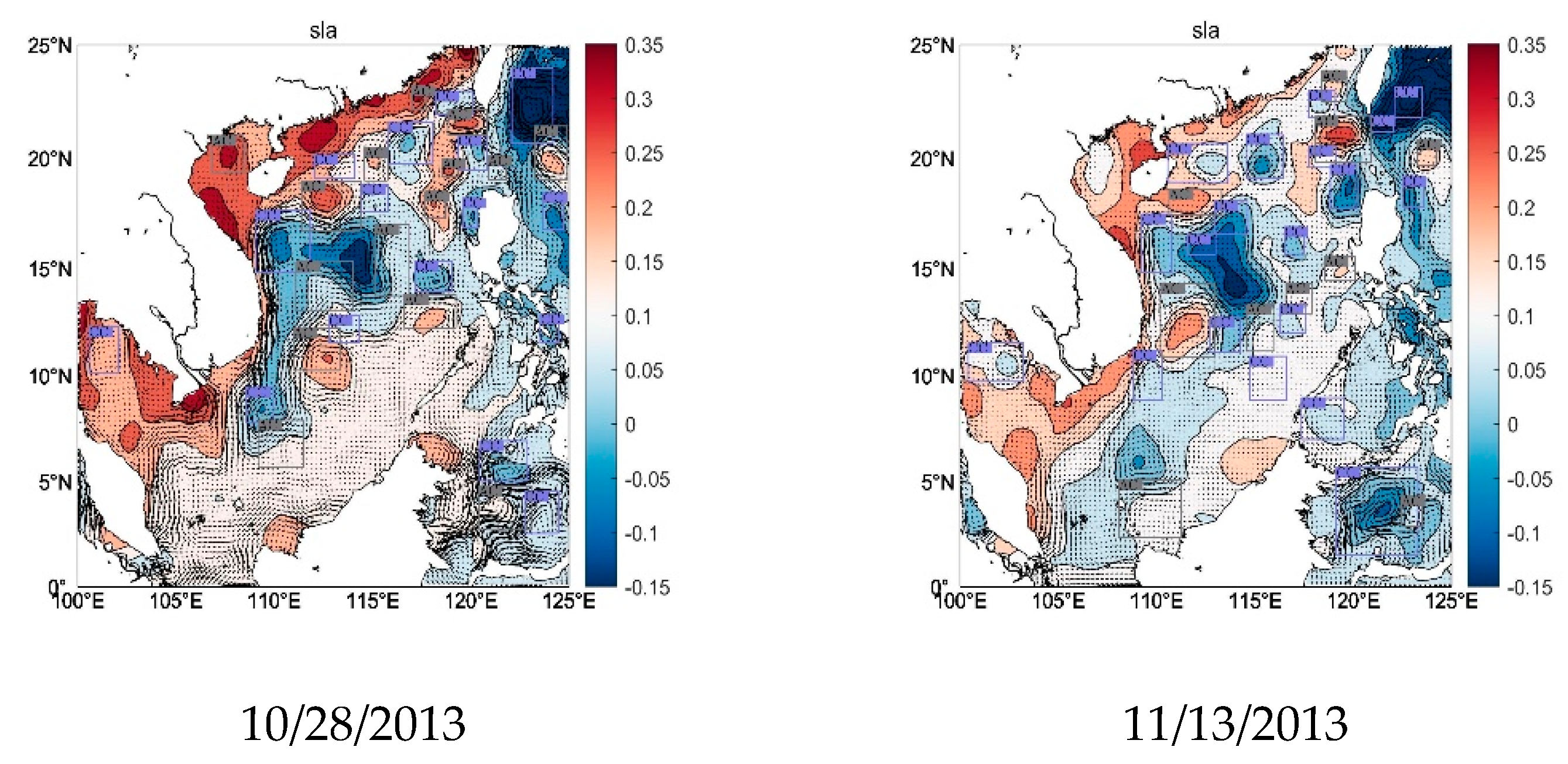
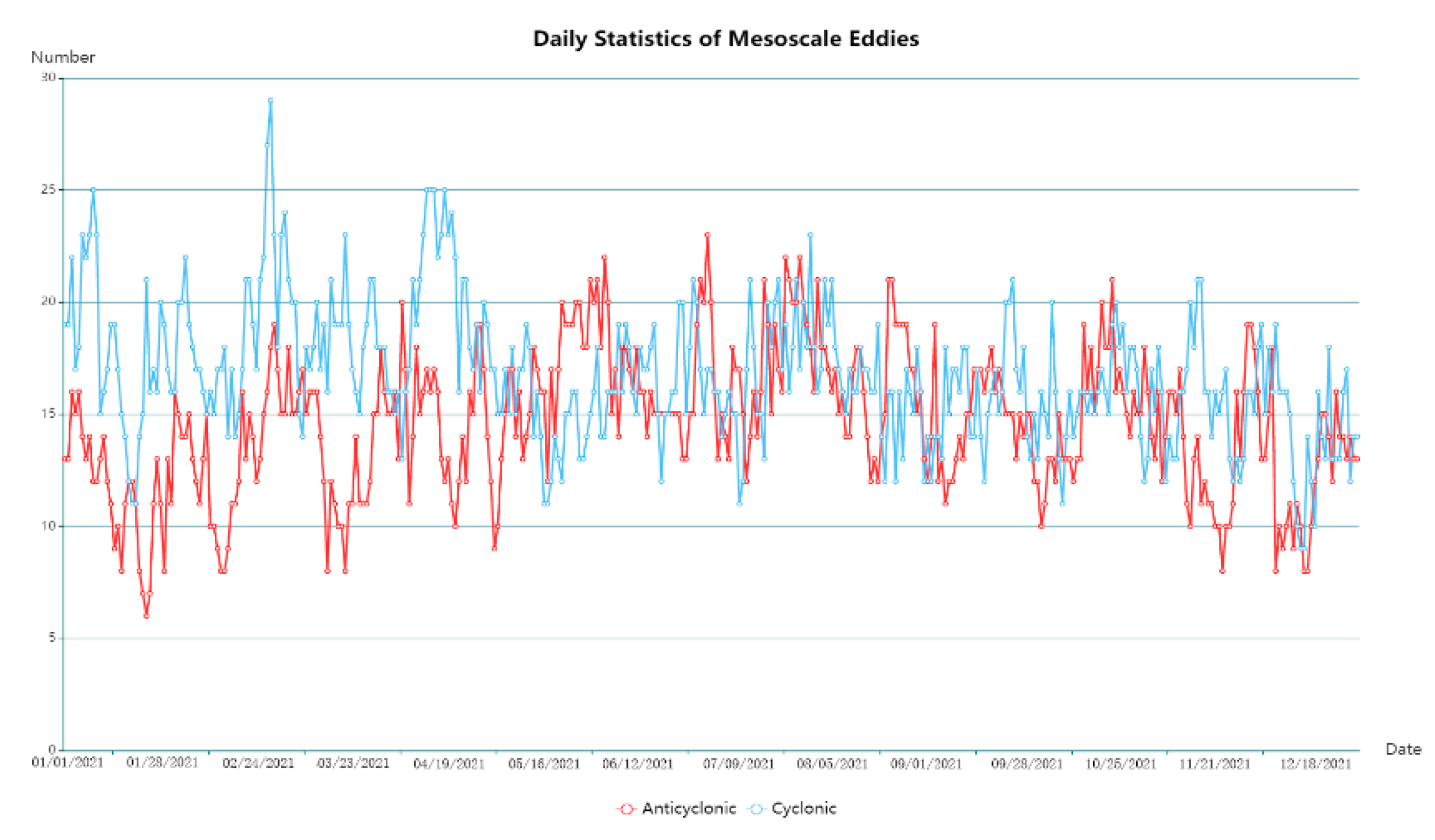
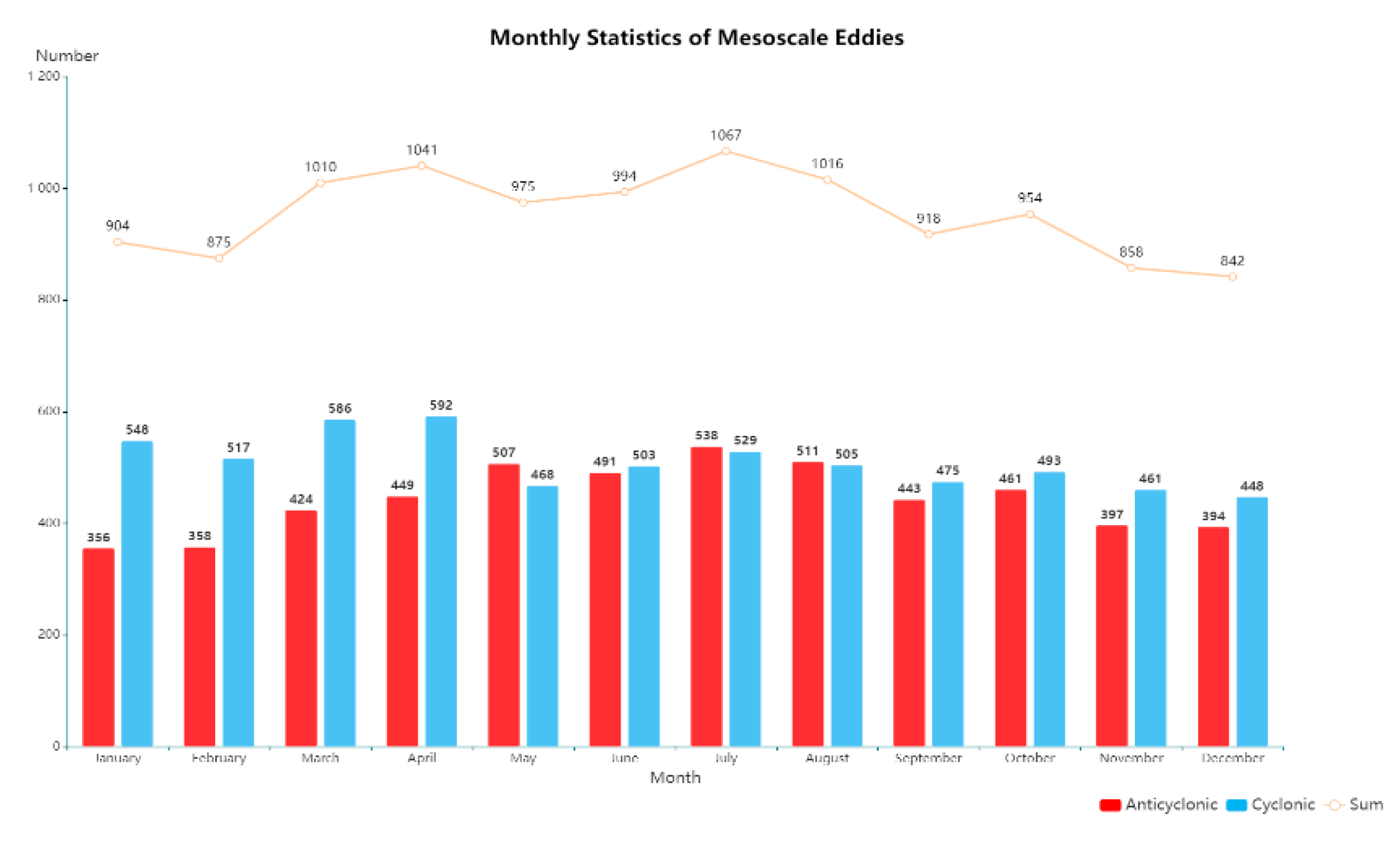
4.3. Temporal Analysis of Mesoscale Eddies
4.4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ikeda, M.; Mysak, L.A.; Emery, W.J. Observation and Modeling of Satellite-Sensed Meanders and Eddies off Vancouver Island. J. Phys. Oceanogr. 1984, 14, 3–21. [Google Scholar] [CrossRef]
- Zhao, Y. Analysis of Sound Propagation in Mesoscale Eddy Environment; Ocean University of China: Shandong, China, 2015. [Google Scholar]
- Wang, Q.; Li, W.; Ma, J.; Han, G.; Zhang, X. Study on the meso-scale process of the Kuroshio front to the east of Taiwan. Mar. Sci. Bull. 2011, 13, 518–528. [Google Scholar]
- Ma, X.; Jing, Z.; Chang, P.; Liu, X.; Montuoro, R.; Small, R.J.; Bryan, F.O.; Greatbatch, R.J.; Brandt, P.; Wu, D.; et al. Western boundary currents regulated by interaction between ocean eddies and the atmosphere. Nature 2016, 535, 533–537. [Google Scholar] [CrossRef] [PubMed]
- Haller, G.; Hadjighasem, A.; Farazmand, M.; Huhn, F. Defining Coherent Eddies Objectively from the Vorticity. J. Fluid Mech. 2016, 795, 136–173. [Google Scholar] [CrossRef] [Green Version]
- Henson, S.; Thomas, A. A census of oceanic anticyclonic eddies in the Gulf of Alaska. Deep Sea Res. Part I Oceanogr. Res. Pap. 2008, 55, 163–176. [Google Scholar] [CrossRef]
- Isern-Fontanet, J.; Garcí a-Ladona, E. Identification of Marine Eddies from Altimetric Maps. J. Atmos. Ocean. Technol. 2003, 20, 772–778. [Google Scholar] [CrossRef]
- Isern-Fontanet, J.; Garcí a-Ladona, E. Eddies of the Mediterranean Sea: An Altimetric Perspective. J. Phys. Oceanogr. 2006, 36, 87–C103. [Google Scholar] [CrossRef] [Green Version]
- Sadarjoen, I.A.; Post, F.H. Detection, quantification, and tracking of eddies using streamline geometry. Comput. Graph. 2000, 24, 333–341. [Google Scholar] [CrossRef]
- Du, Y. Automatic Identification of Mesoscale Eddies Based on Ocean Remote Sensing Images and Its Relationship with Fishing Ground Dynamics; Shanghai Ocean University: Shanghai, China, 2017. [Google Scholar]
- Lguensat, R.; Sun, M.; Fablet, R.; Tandeo, P.; Mason, E.; Chen, G. EddyNet: A Deep Neural Network for Pixel-Wise Classification of Oceanic Eddies. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Franz, K.; Roscher, R.; Milioto, A.; Wenzel, S.; Kusche, J. Ocean Eddy Identification and Tracking Using Neural Networks. In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Xu, G.; Cheng, C.; Yang, W.; Xie, W.; Kong, L.; Hang, R.; Ma, F.; Dong, C.; Yang, J. Oceanic Eddy Identification Using an AI Scheme. Remote Sens. 2019, 11, 1349. [Google Scholar] [CrossRef] [Green Version]
- Lu, X.; Gui, S.; Li, G. Ocean mesoscale eddy recognition and visualization based on deep learning. Comput. Syst. Appl. 2020, 29, 65–75. [Google Scholar]
- Xu, G.; Xie, W.; Dong, C.; Gao, X. Application of Three Deep Learning Schemes into Oceanic Eddy Detection. Front. Mar. Sci. 2021, 8, 715. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26–27 June 2016; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolo9000: Better, faster, stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Liu, Z.; Gu, X.; Yang, H.; Wang, L.; Chen, Y.; Wang, D. Novel YOLOv3 model with structure and hyperparameter optimization for detection of pavement concealed cracks in GPR images. In IEEE Transactions on Intelligent Transportation Systems; IEEE: Piscataway Township, NJ, USA, 2022; pp. 1–11. [Google Scholar]
- Wang, D.; Liu, Z.; Gu, X.; Wu, W.; Chen, Y.; Wang, L. Automatic Detection of Pothole Distress in Asphalt Pavement Using Improved Convolutional Neural Networks. Remote Sens. 2022, 14, 3892. [Google Scholar] [CrossRef]
- Tan, M.; Pang, R.; Le, Q.V. Efficient det: Scalable and efficient object detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10781–10790. [Google Scholar]
- Chen, Q.; Wang, Y.; Yang, T.; Zhang, X.; Cheng, J.; Sun, J. You Only Look One-level Feature. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 13034–13043. [Google Scholar]
- Wu, M. Identification, Tracking and Characteristic Analysis of Mesoscale Eddies in the South China Sea; Guilin University of Technology: Guangxi, China, 2021. [Google Scholar]
- Yuan, D.; Han, W.; Hu, D. Surface Kuroshio path in the Luzon Strait area derived from satellite remote sensing data. J. Geophys. Res. Ocean. 2006, 111, C11007. [Google Scholar] [CrossRef] [Green Version]
- Metzger, E.J.; Hurlburt, H.E. The nondeterministic nature of Kuroshio penetration and eddy shedding in the South China Sea. J. Phys. Oceanogr. 2001, 31, 1712–1732. [Google Scholar] [CrossRef]
- Caruso, M.J.; Gawarkiewicz, G.G.; Beardsley, R.C. Interannual variability of the Kuroshio intrusion in the South China Sea. J. Oceanogr. 2006, 62, 559–575. [Google Scholar] [CrossRef]
- Chen, G.; Hou, Y.; Chu, X.; Qi, P. Vertical structure and evolution of the Luzon warn eddy. Chin. J. Oceanol. Limnol. 2010, 28, 955–961. [Google Scholar] [CrossRef]
- Li, L.; Nowlin, W.D., Jr.; Su, J. Anticyclonic Rings from the Kuroshio in the South China Sea. Deep Sea Res. Part I Oceanogr. Res. Pap. 1998, 45, 1469–1482. [Google Scholar] [CrossRef]
- Xue, H.; Chai, F.; Pettigrew, N.; Xu, D.; Shi, M.; Xu, J. Kuroshio Intrusion and the Circulation in the South China Sea. J. Geophys. Res. Oceans 2004, 109. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Flied, G.R.; Wunsch, C. A description of local and nonlocal eddy-mean flow interaction in a global eddy-permit-ting state estimate. J. Phys. Oceanography 2014, 44, 2336–2352. [Google Scholar] [CrossRef] [Green Version]
- Yuan, D.; Han, W.; Hu, D. Anti-cyclonic eddies northwest of Luzon in summer-fall observed by satellite altimeters. Geophys. Res. Lett. 2007, 34, L13610. [Google Scholar] [CrossRef] [Green Version]
- Nan, F.; He, Z.; Zhou, H.; Wang, D. Three long-lived anticyclonic eddies in the northern South China Sea. Geophys. Res. Ocean. 2011, 116. [Google Scholar] [CrossRef]
- Zheng, Q.; Hu, J.; Zhu, B.; Feng, Y.; Jo, Y.-H.; Sun, Z.; Zhu, J.; Lin, H.; Li, J.; Xu, Y. Standing wave modes observed in the South China Sea deep basin. J. Geophys. Res. Ocean. 2014, 119, 4185–4199. [Google Scholar] [CrossRef]
- Liu, Q.; Kaneko, A.; Su, J. Recent progress in studies of the South China Sea circulation. J. Oceanogr. 2008, 64, 753–762. [Google Scholar] [CrossRef]
- Tian, J.; Qu, T. Advances in research on the deep South China Sea circulation. Chin. Sci. Bull. 2012, 57, 1827–1832. [Google Scholar] [CrossRef] [Green Version]
- Faghmous, J.H.; Frenger, I.; Yao, Y.; Warmka, R.; Lindell, A.; Kumar, V. A daily global mesoscale ocean eddy dataset from satellite altimetry. Sci. Data 2015, 2, 150028. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amores, A.; Jordà, G.; Arsouze, T.; Le Sommer, J. Up to what extent can we characterize ocean eddies using present-day gridded altimetric products. J. Geophysics. Res. Ocean 2018, 123, 7220–7236. [Google Scholar] [CrossRef]
- Pujol, M.I.; Faugère, Y.; Taburet, G.; Dupuy, S.; Pelloquin, C.; Ablain, M.; Picot, N. DUACS DT2014: The new multi-mission altimeter dataset reprocessed over 20 years. Ocean Sci. Discuss. 2016, 12, 1067–1090. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Gu, X.; Wu, W.; Zou, X.; Dong, Q.; Wang, L. GPR-based detection of internal cracks in asphalt pavement: A combination method of DeepAugment data and object detection. Measurement 2022, 197, 111281. [Google Scholar] [CrossRef]
- CAngermann, C.; Haltmeier, M. Deep structure learning using feature extraction in trained projection space. Comput. Electr. Eng. 2021, 92, 107097. [Google Scholar] [CrossRef]
- Nadimi, E.S.; Buijs, M.M.; Herp, J.; Kroijer, R.; Kobaek-Larsen, M.; Nielsen, E.; Pedersen, C.D.; Blanes-Vidal, V.; Baatrup, G. Application of deep learning for autonomous detection and localization of colorectal polyps in wireless colon capsule endoscopy. Comput. Electr. Eng. 2020, 81, 106531. [Google Scholar] [CrossRef]
- Souza, J.M.A.C.; De Boyer Montegut, C.; Le, T.P.Y. Comparison between three implementations of automatic identification algorithms for the quantification and characterization of mesoscale eddies in the South Atlantic Ocean. Ocean. Sci. 2011, 7, 317–334. [Google Scholar] [CrossRef] [Green Version]
- Faghmous, J.H.; Le, M.; Uluyol, M.; Kumar, V.; Chatterjee, S. A parameter-free spatio-temporal pattern mining model to catalog global ocean dynamics. In Proceedings of the 2013 IEEE 13th International Conference on Data Mining, Dallas, TX, USA, 7–10 December 2013. [Google Scholar]
- Yi, J.; Du, Y.; He, Z.; Zhou, C. Enhancing the accuracy of automatic eddy detection and the capability of recognizing the multi-core structures from maps of sea level anomaly. Ocean. Sci. 2014, 10, 39–48. [Google Scholar] [CrossRef]
- Xie, S.; Girshick, R.; Dollár, P.; Tu, Z.; He, K. Aggregated residual transformations for deep neural networks. In Proceedings of the 2017 IEEE Conference on Computer Vision And Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1492–1500. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. Endto-end object detection with transformers. arXiv 2020, arXiv:2005.12872. [Google Scholar]
- Zhu, B.; Wang, J.; Jiang, Z.; Zong, F.; Liu, S.; Li, Z.; Sun, J. Autoassign: Differentiable label assignment for dense object detection. arXiv 2020, arXiv:2007.03496. [Google Scholar]
- Tan, C.; Sun, F.; Kong, T.; Zhang, W.; Yang, C.; Liu, C. A Survey on Deep Transfer Learning. arXiv 2018, arXiv:1808.01974. [Google Scholar]
- Liu, X.; Liu, Z.; Wang, G.; Cai, Z.; Zhang, H. Ensemble transfer learning algorithm. IEEE Access 2018, 6, 2389–2396. [Google Scholar] [CrossRef]
- Tzeng, E.; Hoffman, J.; Zhang, N.; Saenko, K.; Darrell, T. Deep domain confusion: Maximizing for domain invariance. arXiv 2014, arXiv:1412.3474. [Google Scholar]
- Yosinski, J.; Clune, J.; Bengio, Y.; Lipson, H. How transferable are features in deep neural networks? arXiv 2014, arXiv:1411.1792. [Google Scholar]
- Long, M.; Cao, Z.; Wang, J.; Jordan, M.I. Domain adaptation with randomized multilinear adversarial networks. arXiv 2017, arXiv:1705.10667. [Google Scholar]
- Xu, R.; Liu, J.; Xu, J. Extraction of High-Precision Urban Impervious Surfaces from Sentinel-2 Multispectral Imagery via Modified Linear Spectral Mixture Analysis. Sensors 2018, 18, 2873. [Google Scholar] [CrossRef] [Green Version]
- Hao, Y. Research on Ocean Mesoscale Eddy Detection Algorithm Based on Convolution Neural Network. Master’s Thesis, Shandong University of Science and Technology, Shandong, China, 2017. [Google Scholar]
- Pengfei, X.; Tao, S.; Danya, X.; Bolin, C.; Zhongwei, L. Mesoscale eddy detection technology based on deep learning and its application in sound field. Ocean. Inf. 2020, 35, 18–26. [Google Scholar]
- Bai, X.; Wang, C.B.; Li, C.H. A streampath-based RCNN approach to ocean eddy detection. IEEE Access 2019, 7, 106336–106345. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Base Config | Parameter Setting |
|---|---|
| IMS PER BATCH | 6 |
| BASE LR | 0.06 |
| WARMUP FACTOR | 0.00125 |
| WARMUP ITERS | 800 |
| MAX ITER | 12,000 |
| CHECKPOINT PERIOD | 1500 |
| Base Config | Parameter Setting |
|---|---|
| IMS PER BATCH | 6 |
| BASE LR | 0.01125 |
| WARMUP FACTOR | 0.0000625 |
| WARMUP ITERS | 16,000 |
| MAX ITER | 240,000 |
| CHECKPOINT PERIOD | 30,000 |
| Evaluation Indices | P | R | mAP |
|---|---|---|---|
| YOLOF (pretraining stage) | 0.785 | 0.771 | 0.830 |
| YOLOF (transfer-learning stage) | 0.862 | 0.923 | 0.901 |
| YOLOF (test stage) | 0.915 | 0.848 | 0.913 |
| Eddy Detection Model | Accuracy |
|---|---|
| Detection model based on geometric characteristics of flow field [53] | 62% |
| Detection model based on SLA [53] | 76% |
| Detection model based on CNN convolutional neural network [53] | 85% |
| Classic U-Net [54] | 88% |
| SP-RCNN [55] | 90% |
| The detection model based on the YOLOF method proposed in this study | 91% |
| Cyclonic Radius (km) | Cyclonic Amplitude (cm) | Cyclonic EKE (cm2/s2) | Anticyclonic Radius (km) | Anticyclonic Amplitude (cm) | Cyclonic EKE (cm2/s2) |
|---|---|---|---|---|---|
| 113.25 | 4.6 | 232.600 | 132.70 | 2.1 | 105.060 |
| 151.40 | 4.0 | 770.184 | 135.90 | 5.2 | 136.751 |
| 133.65 | 3.4 | 365.916 | 121.60 | 4.4 | 265.478 |
| 84.80 | 3.1 | 145.186 | 59.20 | 3.3 | 109.256 |
| 92.55 | 2.5 | 135.315 | 98.70 | 2.6 | 214.482 |
| 94.10 | 5.7 | 206.219 | 71.60 | 6.4 | 256.262 |
| 83.25 | 8.5 | 428.534 | 95.70 | 12.0 | 919.138 |
| 65.55 | 2.0 | 159.171 | 59.60 | 2.2 | 102.567 |
| 70.65 | 2.4 | 193.082 | 98.15 | 5.7 | 254.659 |
| 95.40 | 10.5 | 2704.139 | 123.90 | 14.2 | 789.647 |
| 75.15 | 2.6 | 352.803 | 27.25 | 2.0 | 273.076 |
| 43.75 | 2.6 | 220.579 | |||
| 46.30 | 3.3 | 312.545 | |||
| 57.35 | 2.3 | 207.547 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, L.; Zhang, D.; Zhang, X.; Guo, Q. Detection and Identification of Mesoscale Eddies in the South China Sea Based on an Artificial Neural Network Model—YOLOF and Remotely Sensed Data. Remote Sens. 2022, 14, 5411. https://doi.org/10.3390/rs14215411
Cao L, Zhang D, Zhang X, Guo Q. Detection and Identification of Mesoscale Eddies in the South China Sea Based on an Artificial Neural Network Model—YOLOF and Remotely Sensed Data. Remote Sensing. 2022; 14(21):5411. https://doi.org/10.3390/rs14215411
Chicago/Turabian StyleCao, Lingjuan, Dianjun Zhang, Xuefeng Zhang, and Quan Guo. 2022. "Detection and Identification of Mesoscale Eddies in the South China Sea Based on an Artificial Neural Network Model—YOLOF and Remotely Sensed Data" Remote Sensing 14, no. 21: 5411. https://doi.org/10.3390/rs14215411
APA StyleCao, L., Zhang, D., Zhang, X., & Guo, Q. (2022). Detection and Identification of Mesoscale Eddies in the South China Sea Based on an Artificial Neural Network Model—YOLOF and Remotely Sensed Data. Remote Sensing, 14(21), 5411. https://doi.org/10.3390/rs14215411