

3D Graph-Based Individual-Tree Isolation (Treeiso) from Terrestrial Laser Scanning Point Clouds


Abstract
:1. Introduction
- an automated, conceptually simple, and unsupervised 3D TLS tree segmenter,
- a reference dataset under various forest scan environments for validation,
- and thorough assessment, including accuracy, sensitivity, and robustness.
2. TLS Plot Data Collection
3. Methods
3.1. Concept of Cut-Pursuit Clustering
3.2. Two-Stage Cut-Pursuit Clustering
3.3. Global Connection
3.4. Implementation of Treeseg for Comparison
3.5. Evaluation
3.6. Sensitivity Analysis
4. Results
4.1. Tree Isolation Visualization
4.2. Tree Detection and Isolation Accuracy
4.3. Sensitivity Analysis
5. Discussion
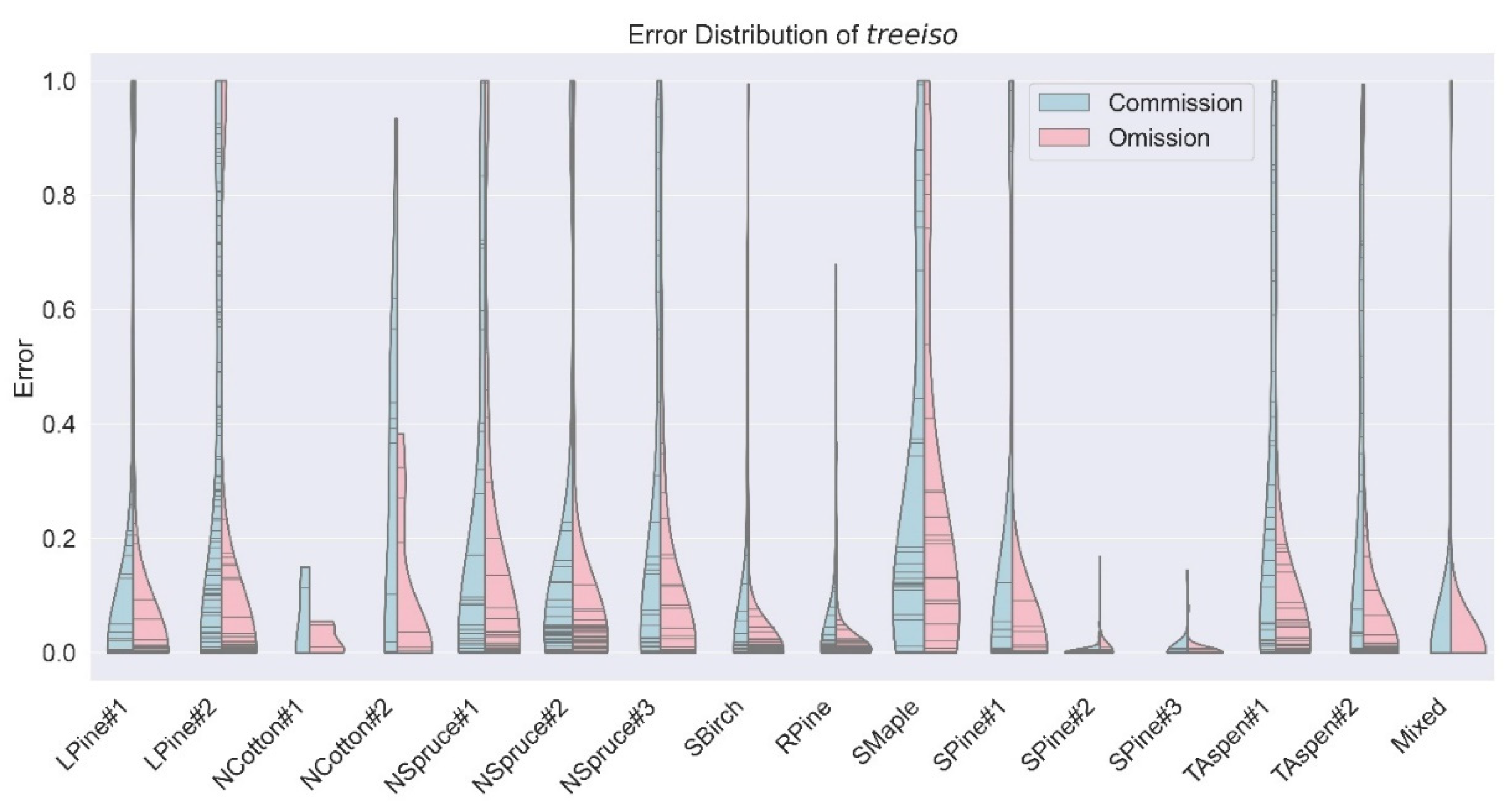
5.1. Distribution of Tree Isolation Error
5.2. Influence of Tree Attributes on Isolation Accuracy
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blackard, J.A.; Finco, M.V.; Helmer, E.H.; Holden, G.R.; Hoppus, M.L.; Jacobs, D.M.; Lister, A.J.; Moisen, G.G.; Nelson, M.D.; Riemann, R.; et al. Mapping U.S. forest biomass using nationwide forest inventory data and moderate resolution information. Remote Sens. Environ. 2008, 112, 1658–1677. [Google Scholar] [CrossRef]
- Beaudoin, A.; Bernier, P.; Villemaire, P.; Guindon, L.; Guo, X.J. Tracking forest attributes across Canada between 2001 and 2011 using ak nearest neighbors mapping approach applied to MODIS imagery. Can. J. For. Res. 2018, 48, 85–93. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Fu, H.; Li, W.; Wu, W.; Yu, L.; Yuan, S.; Tao, W.Y.W.; Pang, T.K.; Kanniah, K.D. Growing status observation for oil palm trees using Unmanned Aerial Vehicle (UAV) images. ISPRS J. Photogramm. Remote Sens. 2021, 173, 95–121. [Google Scholar] [CrossRef]
- Bouvier, M.; Durrieu, S.; Fournier, R.A.; Renaud, J.-P. Generalizing predictive models of forest inventory attributes using an area-based approach with airborne LiDAR data. Remote Sens. Environ. 2015, 156, 322–334. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Hall, R. The uncertainty in conifer plantation growth prediction from multi-temporal lidar datasets. Remote Sens. Environ. 2008, 112, 1168–1180. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Coomes, D.A.; Dalponte, M.; Jucker, T.; Asner, G.P.; Banin, L.F.; Burslem, D.F.; Lewis, S.L.; Nilus, R.; Phillips, O.L.; Phua, M.-H. Area-based vs tree-centric approaches to mapping forest carbon in Southeast Asian forests from airborne laser scanning data. Remote Sens. Environ. 2017, 194, 77–88. [Google Scholar] [CrossRef] [Green Version]
- Zianis, D.; Muukkonen, P.; Mäkipää, R.; Mencuccini, M. Biomass and Stem Volume Equations for Tree Species in Europe. Silva Fenn. Monogr. 2005, 4, 1–2. [Google Scholar] [CrossRef]
- Hantsch, L.; Bien, S.; Radatz, S.; Braun, U.; Auge, H.; Bruelheide, H. Tree diversity and the role of non-host neighbour tree species in reducing fungal pathogen infestation. J. Ecol. 2014, 102, 1673–1687. [Google Scholar] [CrossRef] [Green Version]
- Rozendaal, D.M.A.; Hurtado, V.H.; Poorter, L. Plasticity in leaf traits of 38 tropical tree species in response to light; relationships with light demand and adult stature. Funct. Ecol. 2006, 20, 207–216. [Google Scholar] [CrossRef]
- Seidel, D.; Leuschner, C.; Müller, A.; Krause, B. Crown plasticity in mixed forests—Quantifying asymmetry as a measure of competition using terrestrial laser scanning. For. Ecol. Manag. 2011, 261, 2123–2132. [Google Scholar] [CrossRef]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.S.; Avitabile, V.; Disney, M.; Armston, J.D.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2015, 6, 198–208. [Google Scholar] [CrossRef]
- Côté, J.-F.; Fournier, R.A.; Egli, R. An architectural model of trees to estimate forest structural attributes using terrestrial LiDAR. Environ. Model. Softw. 2011, 26, 761–777. [Google Scholar] [CrossRef]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2013, 75, 64–75. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Young-Pow, C.; Treitz, P. Assessing forest metrics with a ground-based scanning lidar. Can. J. For. Res. 2004, 34, 573–583. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhang, W.; Hu, R.; Qi, J.; Shao, J.; Li, D.; Wan, P.; Qiao, C.; Shen, A.; Yan, G. Estimation of forest leaf area index using terrestrial laser scanning data and path length distribution model in open-canopy forests. Agric. For. Meteorol. 2018, 263, 323–333. [Google Scholar] [CrossRef]
- Maas, H.-G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Greaves, H.E.; Vierling, L.A.; Eitel, J.U.H.; Boelman, N.T.; Magney, T.S.; Prager, C.M.; Griffin, K.L. Applying terrestrial lidar for evaluation and calibration of airborne lidar-derived shrub biomass estimates in Arctic tundra. Remote Sens. Lett. 2017, 8, 175–184. [Google Scholar] [CrossRef]
- De Tanago, J.G.; Lau, A.; Bartholomeus, H.; Herold, M.; Avitabile, V.; Raumonen, P.; Martius, C.; Goodman, R.C.; Disney, M.; Manuri, S.; et al. Estimation of above-ground biomass of large tropical trees with terrestrial LiDAR. Methods Ecol. Evol. 2018, 9, 223–234. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Lin, Y.; Herold, M. Tree species classification based on explicit tree structure feature parameters derived from static terrestrial laser scanning data. Agric. For. Meteorol. 2016, 216, 105–114. [Google Scholar] [CrossRef]
- Xi, Z.; Hopkinson, C.; Rood, S.B.; Peddle, D.R. See the forest and the trees: Effective machine and deep learning algorithms for wood filtering and tree species classification from terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 168, 1–16. [Google Scholar] [CrossRef]
- de Paula Pires, R.; Olofsson, K.; Persson, H.J.; Lindberg, E.; Holmgren, J. Individual tree detection and estimation of stem attributes with mobile laser scanning along boreal forest roads. ISPRS J. Photogramm. Remote Sens. 2022, 187, 211–224. [Google Scholar] [CrossRef]
- Burt, A.; Disney, M.; Calders, K. Extracting individual trees from lidar point clouds using treeseg. Methods Ecol. Evol. 2019, 10, 438–445. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, X.; Cao, L.; An, F.; Chen, B.; Xue, L.; Yun, T. Individual Rubber Tree Segmentation Based on Ground-Based LiDAR Data and Faster R-CNN of Deep Learning. Forests 2019, 10, 793. [Google Scholar] [CrossRef] [Green Version]
- Raumonen, P.; Casella, E.; Calders, K.; Murphy, S.; Åkerblom, M.; Kaasalainen, M. Massive-scale tree modelling from TLS data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 2, 189. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Ma, W.; Zhang, J.; Liu, Y.; Xu, D.; Wang, J. Point-cloud segmentation of individual trees in complex natural forest scenes based on a trunk-growth method. J. For. Res. 2021, 32, 2403–2414. [Google Scholar] [CrossRef]
- Fu, H.; Li, H.; Dong, Y.; Xu, F.; Chen, F. Segmenting Individual Tree from TLS Point Clouds Using Improved DBSCAN. Forests 2022, 13, 566. [Google Scholar] [CrossRef]
- Yang, B.; Dai, W.; Dong, Z.; Liu, Y. Automatic Forest Mapping at Individual Tree Levels from Terrestrial Laser Scanning Point Clouds with a Hierarchical Minimum Cut Method. Remote Sens. 2016, 8, 372. [Google Scholar] [CrossRef] [Green Version]
- Heinzel, J.; Huber, M.O. Constrained Spectral Clustering of Individual Trees in Dense Forest Using Terrestrial Laser Scanning Data. Remote Sens. 2018, 10, 1056. [Google Scholar] [CrossRef]
- Wang, D. Unsupervised semantic and instance segmentation of forest point clouds. ISPRS J. Photogramm. Remote Sens. 2020, 165, 86–97. [Google Scholar] [CrossRef]
- Di Wang, D.; Liang, X.; Mofack, G.I.; Martin-Ducup, O. Individual tree extraction from terrestrial laser scanning data via graph pathing. For. Ecosyst. 2021, 8, 67. [Google Scholar] [CrossRef]
- Fan, H.; Zhu, N.; Dong, Z. A Two-stage Approach for Individual Tree Segmentation from TLS Point Clouds. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 8682–8693. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Zhong, L.; Cheng, L.; Xu, H.; Wu, Y.; Chen, Y.; Li, M. Segmentation of individual trees from TLS and MLS data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 10, 774–787. [Google Scholar] [CrossRef]
- Bellman, R. Dynamic programming. Science 1966, 153, 34–37. [Google Scholar] [CrossRef] [PubMed]
- Frey, H.C.; Patil, S.R. Identification and Review of Sensitivity Analysis Methods. Risk Anal. 2002, 22, 553–578. [Google Scholar] [CrossRef]
- Sobol, I.M. Sensitivity analysis for non-linear mathematical models. Math. Model. Comput. Exp. 1993, 1, 407–414. [Google Scholar]
- Zadeh, F.K.; Nossent, J.; Sarrazin, F.; Pianosi, F.; van Griensven, A.; Wagener, T.; Bauwens, W. Comparison of variance-based and moment-independent global sensitivity analysis approaches by application to the SWAT model. Environ. Model. Softw. 2017, 91, 210–222. [Google Scholar] [CrossRef] [Green Version]
- Borgonovo, E.; Castaings, W.; Tarantola, S. Moment Independent Importance Measures: New Results and Analytical Test Cases. Risk Anal. 2011, 31, 404–428. [Google Scholar] [CrossRef]
- Pianosi, F.; Wagener, T. A simple and efficient method for global sensitivity analysis based on cumulative distribution functions. Environ. Model. Softw. 2015, 67, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Xi, Z.; Hopkinson, C. Detecting Individual-Tree Crown Regions from Terrestrial Laser Scans with an Anchor-Free Deep Learning Model. Can. J. Remote Sens. 2021, 47, 228–242. [Google Scholar] [CrossRef]
- CloudCompare, 2.12 Beta. 2021. Available online: https://www.danielgm.net/cc/ (accessed on 6 May 2022).
- Boykov, Y.; Kolmogorov, V. An experimental comparison of min-cut/max- flow algorithms for energy minimization in vision. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1124–1137. [Google Scholar] [CrossRef] [PubMed]
- Chambolle, A.; Darbon, J. On Total Variation Minimization and Surface Evolution Using Parametric Maximum Flows. Int. J. Comput. Vis. 2009, 84, 288–307. [Google Scholar] [CrossRef] [Green Version]
- Boykov, Y.Y.; Jolly, M.-P. Interactive graph cuts for optimal boundary & region segmentation of objects in N-D images. In Proceedings of the Eighth IEEE International Conference on Computer Vision ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; pp. 105–112. [Google Scholar]
- Landrieu, L.; Obozinski, G. Cut Pursuit: Fast Algorithms to Learn Piecewise Constant Functions on General Weighted Graphs. SIAM J. Imaging Sci. 2017, 10, 1724–1766. [Google Scholar] [CrossRef] [Green Version]
- Raguet, H.; Landrieu, L. Cut-pursuit algorithm for regularizing nonsmooth functionals with graph total variation. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; Volume 80, pp. 4247–4256. [Google Scholar]
- Bechtel, B.; Ringeler, A.; Böhner, J. Segmentation for Object Extraction of Trees using MATLAB and SAGA. SAGA–Second. Out, Hambg. Beitr. Zur Phys. Geogr. Landschaftsökologie. Univ. Hambg. Inst. Geogr. 2008, 19, 1–12. [Google Scholar]
- Xi, Z.; Hopkinson, C.; Chasmer, L. Filtering Stems and Branches from Terrestrial Laser Scanning Point Clouds Using Deep 3-D Fully Convolutional Networks. Remote Sens. 2018, 10, 1215. [Google Scholar] [CrossRef] [Green Version]
- Kisantal, M.; Wojna, Z.; Murawski, J.; Naruniec, J.; Cho, K. Augmentation for small object detection. arXiv 2019, arXiv:1902.07296. [Google Scholar]
- Schubert, M.; Kahl, K.; Rottmann, M. MetaDetect: Uncertainty Quantification and Prediction Quality Estimates for Object Detection. In Proceedings of the 2021 International Joint Conference on Neural Networks (IJCNN), Shenzhen, China, 18–22 July 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Stovall, A.E.; Anderson-Teixeira, K.J.; Shugart, H.H. Assessing terrestrial laser scanning for developing non-destructive biomass allometry. For. Ecol. Manag. 2018, 427, 217–229. [Google Scholar] [CrossRef]
- MATLAB 2020b; The MathWorks Inc.: Natick, MA, USA, 2020.
- Herman, J.; Usher, W. SALib: An open-source Python library for Sensitivity Analysis. J. Open Source Softw. 2017, 2, 97. [Google Scholar] [CrossRef]
- Seaholm, S.K.; Ackerman, E.; Wu, S.-C. Latin hypercube sampling and the sensitivity analysis of a Monte Carlo epidemic model. Int. J. Bio-Medical Comput. 1988, 23, 97–112. [Google Scholar] [CrossRef] [PubMed]
- Puy, A.; Piano, S.L.; Saltelli, A. A sensitivity analysis of the PAWN sensitivity index. Environ. Model. Softw. 2020, 127, 104679. [Google Scholar] [CrossRef]
- Hui, Z.; Jin, S.; Li, D.; Ziggah, Y.Y.; Liu, B. Individual Tree Extraction from Terrestrial LiDAR Point Clouds Based on Transfer Learning and Gaussian Mixture Model Separation. Remote Sens. 2021, 13, 223. [Google Scholar] [CrossRef]
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Pearson correlation coefficient. In Noise Reduction in Speech Processing; Springer: Berlin/Heidelberg, Germany, 2009; Volume 2, pp. 1–4. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Plot ID | Common Name | Date | Location | Tree Height (std *) (m) | Stem Density (ha−1) | Subcanopy Height (m) | Slope (°) | Size (m) (Shape) | Complexity |
|---|---|---|---|---|---|---|---|---|---|
| LPine#1 | lodgepole pine | 7–8 August 2016 | Canada 49.67°, −109.51° | 19.6 (3.7) | 1033 | 0.7 | 3.5 | 20 c | Medium |
| LPine#2 | lodgepole pine | 29–30 August 2016 | Canada 49.68°, −109.52° | 14.4 (4.7) | 2068 | 0.5 | 3.8 | 20 c | Medium |
| NSpruce#1 | Norway spruce | Apri–May 2014 | Finland 61.21°, 25.07° | 19.6 (7.3) | 531 | 0.8 | 2.1 | 20 s | Difficult |
| NSpruce#2 | Norway spruce | April–May 2014 | Finland 61.21°, 25.07° | 21.6 (5.2) | 537 | 1.3 | 9.7 | 20 s | Difficult |
| NSpruce#3 | Norway spruce | April–May 2014 | Finland 61.21°, 25.07° | 19.3 (8) | 546 | 2.2 | 1.5 | 20 s | Difficult |
| SBirch | silver birch | April–May 2014 | Finland 61.21°, 25.07° | 16.2 (1.5) | 955 | 1.0 | 0.5 | 20 s | Easy |
| RPine | red pine | 8–10 July 2015 | Canada 44.08°, −79.32° | 25.7 (0.9) | 583 | 5.8 | 2.9 | 20 c | Medium |
| SPine#1 | Scots pine | April–May 2014 | Finland 61.21°, 25.07° | 17.6 (5.4) | 492 | 1.4 | 2.7 | 20 s | Easy |
| SPine#2 | Scots pine | Apri–May 2014 | Finland 61.21°, 25.07° | 21.9 (3) | 357 | 1.1 | 1.0 | 20 s | Easy |
| SPine#3 | Scots pine | Apri–May 2014 | Finland 61.21°, 25.07° | 24.8 (3.9) | 317 | 1.7 | 6.8 | 20 s | Easy |
| TAspen#1 | trembling aspen | 2 August 2016 | Canada 49.35°, −114.41° | 12.4 (2.5) | 544 | 0.9 | 4.3 | 20 c | Difficult |
| TAspen#2 | trembling aspen | 2 May 2018 | Canada 49.35°, −114.41° | 13.4 (2) | 478 | 1.3 | 5.7 | 20 c | Difficult |
| SMaple | sugar maple | 8–10 July 2015 | Canada 44.08°, −79.32° | 23.4 (3.5) | 216 | 4.5 | 4.3 | 20 c | Difficult |
| NCotton#1 | narrowleaf cottonwood | 21 March 2015 | Canada 49.68°, −112.85° | 13.8 (3.5) | 121 | 1.1 | 0.4 | 20 c | Difficult |
| NCotton#2 | narrowleaf cottonwood | 20 April 2015 | Canada 49.68°, −112.85° | 9.2 (3.1) | 247 | 1.0 | 0.7 | 20 c | Difficult |
| Mixed | - | 18 August 2020 | Canada 49.03°, −114.04° | 16.8 (4.2) | 642 | 0.9 | 0.7 | 50 s | Easy |
| Name | Value | Implication | Range |
|---|---|---|---|
| * | 5 points | Number of nearest neighbors, controlling unit size of a cluster | [3–20] |
| * | 20 clusters | [10–40] | |
| 20 segments | - | ||
| * | 1.0 | A regularizing parameter, a greater number producing more edge cuts | [0.1–40] |
| * | 20.0 | [5–40] | |
| 1.0 | Weighing the importance of node variation over edge variation | - | |
| 2.0 m | Maximally allowed threshold distance to consider an edge | - | |
| * | 0.5 | Ratio of elevation difference from neighbors to segment length | [0.1–2] |
| * | 0.5 | Importance of the horizontal overlapping ratio over the vertical | [0–1] |
| treeseg | treeiso | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Plot Name | Trees Reference | Trees Isolated | Rate * | mIoU | mIoU (Detected) | Trees Isolated | Rate * | mIoU | mIoU (Detected) | Complexity |
| LPine#1 | 112 | 97 | 64% | 0.27 | 0.41 | 99 | 88% | 0.88 | 0.97 | Medium |
| LPine#2 | 217 | 135 | 41% | 0.14 | 0.31 | 157 | 71% | 0.70 | 0.92 | Medium |
| NCotton#1 | 5 | 5 | 60% | 0.24 | 0.38 | 6 | 100% | 0.93 | 0.93 | Difficult |
| NCotton#2 | 16 | 13 | 50% | 0.13 | 0.22 | 14 | 81% | 0.71 | 0.82 | Difficult |
| NSpruce#1 | 47 | 43 | 68% | 0.19 | 0.27 | 43 | 77% | 0.74 | 0.90 | Difficult |
| NSpruce#2 | 49 | 46 | 78% | 0.18 | 0.23 | 45 | 90% | 0.82 | 0.90 | Difficult |
| NSpruce#3 | 50 | 38 | 74% | 0.20 | 0.27 | 44 | 76% | 0.73 | 0.90 | Difficult |
| SBirch | 88 | 77 | 89% | 0.41 | 0.46 | 79 | 91% | 0.88 | 0.94 | Easy |
| RPine | 68 | 49 | 54% | 0.23 | 0.41 | 68 | 97% | 0.94 | 0.96 | Medium |
| SMaple | 32 | 31 | 63% | 0.21 | 0.33 | 30 | 72% | 0.65 | 0.81 | Difficult |
| SPine#1 | 43 | 35 | 79% | 0.28 | 0.35 | 38 | 86% | 0.85 | 0.98 | Easy |
| SPine#2 | 32 | 31 | 91% | 0.37 | 0.40 | 32 | 100% | 0.99 | 0.99 | Easy |
| SPine#3 | 24 | 24 | 92% | 0.48 | 0.53 | 24 | 100% | 1.00 | 1.00 | Easy |
| TAspen#1 | 52 | 45 | 69% | 0.19 | 0.27 | 40 | 75% | 0.70 | 0.87 | Difficult |
| TAspen#2 | 43 | 41 | 60% | 0.17 | 0.26 | 35 | 77% | 0.76 | 0.91 | Difficult |
| Mixed | 142 | 129 | 37% | 0.17 | 0.46 | 129 | 91% | 0.90 | 0.97 | Easy |
| Attribute | IoU | Commission | Omission |
|---|---|---|---|
| N * | 0.11 | −0.11 | −0.05 |
| Height | 0.18 | −0.18 | −0.06 |
| DBH | 0.02 | −0.04 | −0.03 |
| Area | −0.01 | −0.02 | 0.02 |
| Overlap | −0.20 | 0.19 | 0.12 |
| NNdist | 0.18 | −0.22 | −0.08 |
| Occlusion | 0.10 | −0.12 | −0.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xi, Z.; Hopkinson, C. 3D Graph-Based Individual-Tree Isolation (Treeiso) from Terrestrial Laser Scanning Point Clouds. Remote Sens. 2022, 14, 6116. https://doi.org/10.3390/rs14236116
Xi Z, Hopkinson C. 3D Graph-Based Individual-Tree Isolation (Treeiso) from Terrestrial Laser Scanning Point Clouds. Remote Sensing. 2022; 14(23):6116. https://doi.org/10.3390/rs14236116
Chicago/Turabian StyleXi, Zhouxin, and Chris Hopkinson. 2022. "3D Graph-Based Individual-Tree Isolation (Treeiso) from Terrestrial Laser Scanning Point Clouds" Remote Sensing 14, no. 23: 6116. https://doi.org/10.3390/rs14236116
APA StyleXi, Z., & Hopkinson, C. (2022). 3D Graph-Based Individual-Tree Isolation (Treeiso) from Terrestrial Laser Scanning Point Clouds. Remote Sensing, 14(23), 6116. https://doi.org/10.3390/rs14236116