

Magnetopause Detection under Low Solar Wind Density Based on Deep Learning
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Data
2.1.1. MHD Simulation
2.1.2. SXI Simulation
2.1.3. Noise Analysis
2.1.4. Target Annotation
2.2. Methodologies
2.2.1. Training Dataset
2.2.2. Detection of the Photon Count Peak Position
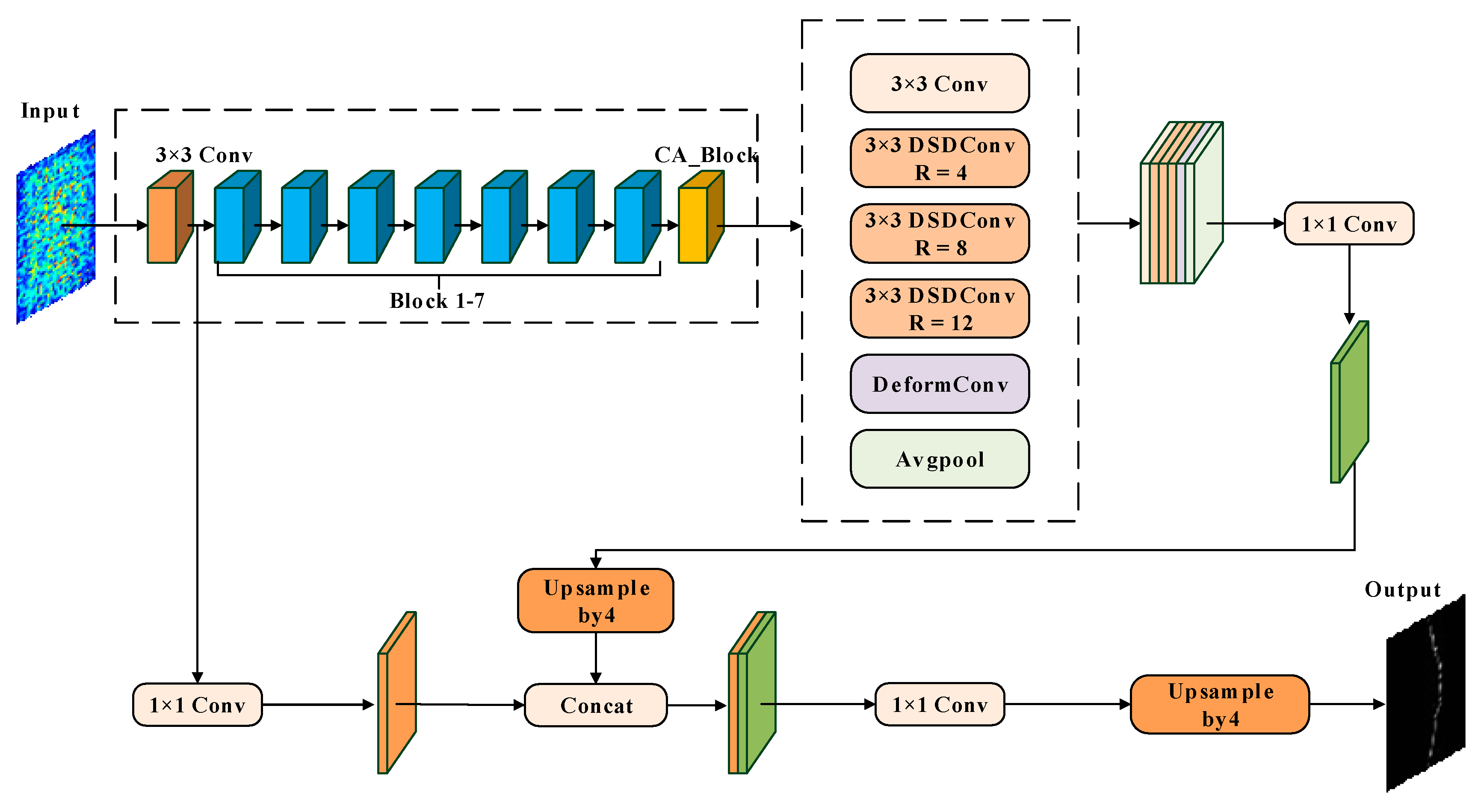
Detection Network of the Photon Count Peak Position
Loss Function
Model Training
Accuracy Evaluation Metrics
2.2.3. Magnetopause Position Detection
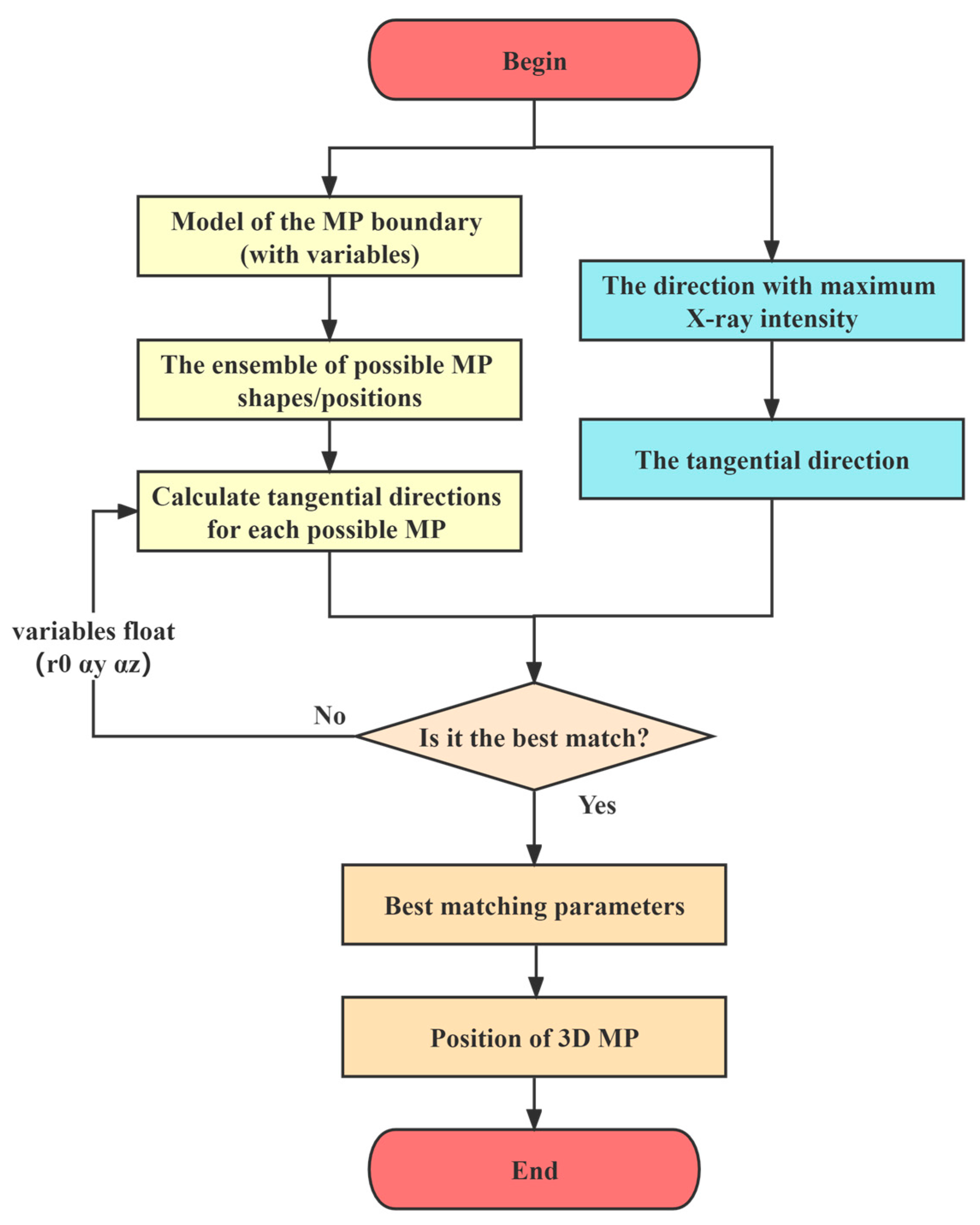
TFA Calculation Model
Accuracy Evaluation Metrics
3. Results
3.1. Detection of the Photon Count Peak Position
3.2. Magnetopause Position Detection
4. Discussion
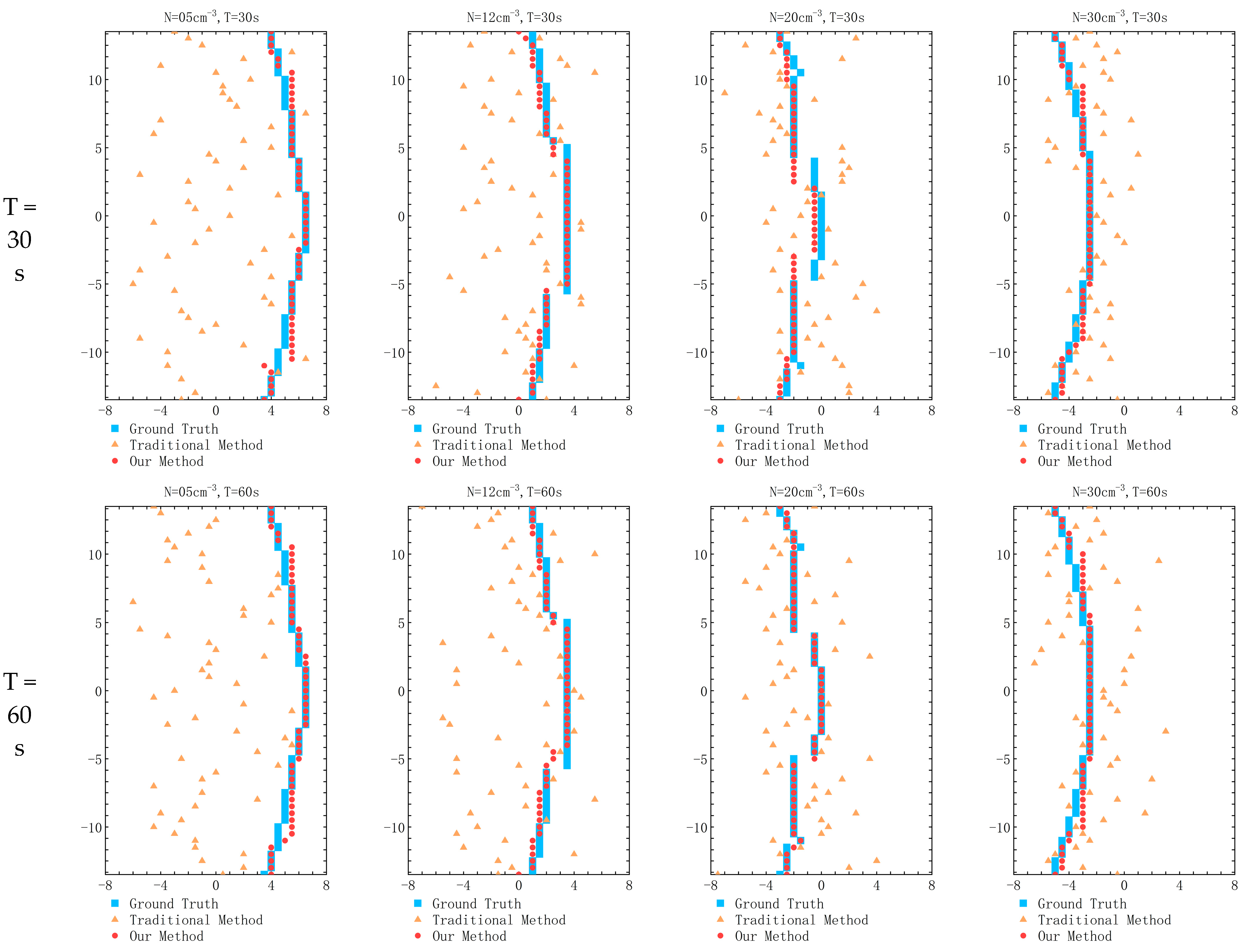
4.1. SXI Images Detection for Different Integration Times
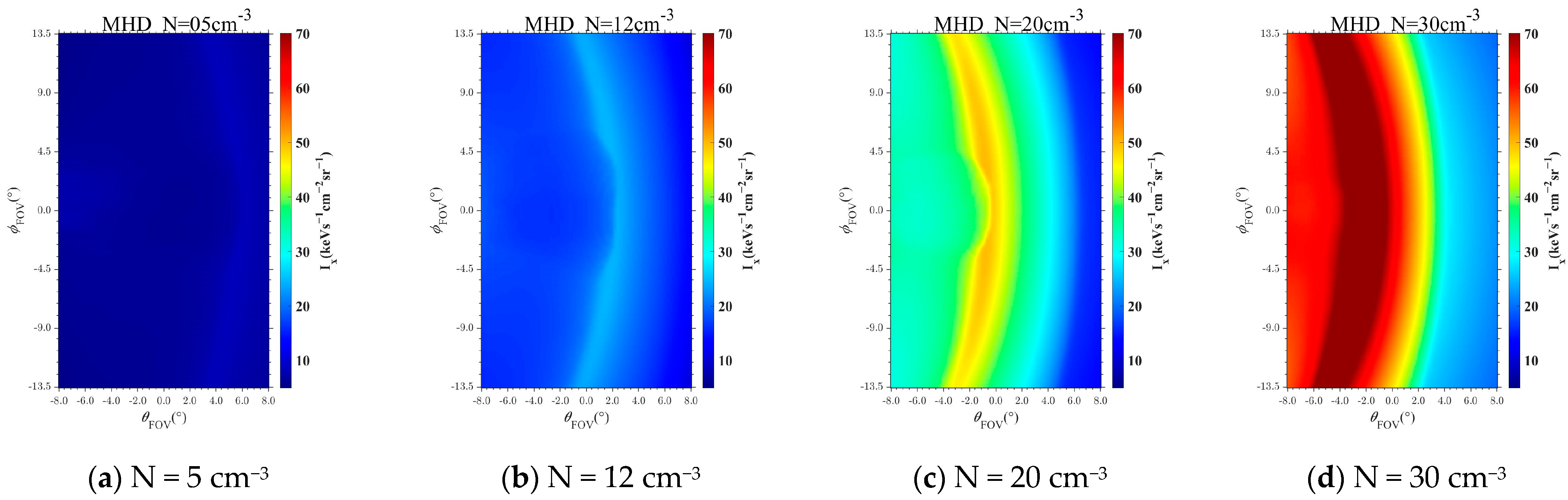
4.2. SXI Image Detection for Different Solar Wind Densities
4.3. Magnetopause Position Detection
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, C.; Li, Z.J.; Sun, T.R.; Liu, Z.Q.; Liu, J.; Wu, Q.; Zheng, J.H.; Li, J. SMILE Satellite mission survey. Space Int. 2017, 464, 13–16. (In Chinese) [Google Scholar]
- Branduardi-Raymont, G.; Escoubet, C.P.; Kuntz, K.; Lui, T.; Read, A.; Sibeck, D.; Dai, L.; Dmitriev, A.; Donovan, E.; Dunlo, M.; et al. Link between Solar Wind, Magnetosphere, and Lonosphere. ISSI-BJ Magazine, 27 January 2016; p. 9. [Google Scholar]
- Sonett, C.P.; Abrams, I.J. The distant geomagnetic field: 3. Disorder and shocks in the magnetopause. J. Geophys. Res. 1963, 68, 1233–1263. [Google Scholar] [CrossRef]
- Cahill, L.J.; Amazeenp, G. The boundary of the geo-magnetic field. J.Geophys. Res. 1963, 68, 1835–1843. [Google Scholar] [CrossRef]
- Lisse, C.M.; Dennerl, K.; Englhauser, J.; Harden, M.; Marshall, F.E.; Mumma, M.J.; Petre, R.; Pye, J.P.; Ricketts, M.J.; Schmitt, J.H.; et al. Discovery of X-ray and extreme ultraviolet emission from comet C/Hyakutake 1996 B2. Science 1996, 274, 205–209. [Google Scholar] [CrossRef]
- Kuntz, K.D.; Collado-Vega, Y.M.; Collier, M.R.; Connor, H.; Cravens, T.E.; Koutroumpa, D.; Porter, F.; Robertson, I.P.; Sibeck, D.G.; Snowden, S.L.; et al. The solar wind charge-exchange production factor for hydrogen. Rev. Sci. Instrum. 2015, 808, 143. [Google Scholar] [CrossRef]
- Robertson, I.P.; Collier, M.R.; Cravens, T.E.; Fok, M.-C. X-ray emission from the terrestrial magnetosheath including the cusps. J. Geophys. Res. Atmos. 2006, 111, Al2105. [Google Scholar] [CrossRef]
- Dennerl, K. High Resolution X-ray Spectroscopy of Comets. In Proceedings of the International Workshop, London, UK, 19 March 2009. [Google Scholar]
- Schwadron, N.A.; Cravens, T.E. Implications of solar wind composition for cometary X-rays. Astrophys. J. 2000, 544, 558–566. [Google Scholar] [CrossRef]
- Carter, J.A.; Sembay, S. Identifying XMM-Newton observations affected by solar wind charge exchange—Part I. Astron. Astrophys. 2008, 489, 837–848. [Google Scholar] [CrossRef]
- Carter, J.A.; Sembay, S.; Read, A.M. A high charge state coronal mass ejection seen through solar wind charge exchange emission as detected by XMM-Newton. Mon. Not. R. Astron. Soc. 2010, 402, 867. [Google Scholar] [CrossRef]
- Carter, J.A.; Sembay, S.; Read, A.M. Identifying XMM-Newton observations affected by solar wind charge exchange—Part II. Astron. Astrophys. 2011, 527, A115. [Google Scholar] [CrossRef]
- Fujimoto, R.; Mitsuda, K.; McCammon, D.; Takei, Y.; Bauer, M.; Ishisaki, Y.; Porter, F.S.; Yamaguchi, H.; Hayashida, K.; Yamasaki, N.Y. Evidence for solar-wind charge-exchange X-ray emission from the Earth’s magnetosheath. Publ. Astron. Soc. Jpn. 2007, 59, 133–140. [Google Scholar] [CrossRef]
- Snowden, S.L.; Collier, M.R.; Cravens, T.; Kuntz, K.D.; Lepri, S.T.; Robertson, I.; Tomas, L. Observation of solar wind charge exchange emission from exospheric material in and outside Earth’s magnetosheath 2008 September 25. Astrophys. J. 2009, 691, 372–381. [Google Scholar] [CrossRef]
- Sun, T.R.; Wang, C.; Sembay, S.F.; Lopez, R.E.; Escoubet, C.P.; Branduardi-Raymont, G.; Zheng, J.H.; Yu, X.Z.; Guo, X.C.; Dai, L.; et al. Soft X-ray Imaging of the Magnetosheath and Cusps Under Different Solar Wind Conditions: MHD Simulations. J. Geophys. Res. Space Phys. 2019, 124, 2435–2450. [Google Scholar] [CrossRef]
- Samsonov, A.; Carter, J.A.; Read, A.; Sembay, S.; Branduardi-Raymont, G.; Sibeck, D.; Escoubet, P. Finding Magnetopause Standoff Distance using a Soft X-ray Imager–Part 1, Magnetospheric masking. J. Geophys. Res. Space Phys. 2022, 127, e2022JA030848. [Google Scholar]
- Peng, S.; Ye, Y.; Wei, F.; Yang, Z.; Guo, Y.; Sun, T. Numerical model built for the simulation of the earth magnetopause by lobster-eye-type soft X-ray imager onboard SMILE satellite. Opt. Express. 2018, 26, 15138–15152. [Google Scholar] [CrossRef]
- Jorgensen, A.M.; Sun, T.; Wang, C.; Dai, L.; Sembay, S.; Wei, F.; Guo, Y.; Xu, R. Boundary Detection in Three Dimensions with Application to the SMILE Mission: The Effect of Photon Noise. J. Geophys. Res. Space Phys. 2019, 124, 4365–4383. [Google Scholar] [CrossRef]
- Jorgensen, A.M.; Sun, T.; Wang, C.; Dai, L.; Sembay, S.; Zheng, J.; Yu, X. Boundary Detection in Three Dimensions with Application to the SMILE Mission: The Effect of Model-Fitting Noise. J. Geophys. Res. Space Phys. 2019, 124, 4341–4355. [Google Scholar] [CrossRef]
- Collier, M.R.; Connor, H.K. Magnetopause Surface Reconstruction from Tangent Vector Observations. J. Geophys. Res. Space Phys. 2018, 123, 10189–10199. [Google Scholar] [CrossRef]
- Sun, T.; Wang, C.; Connor, H.K.; Jorgensen, A.M.; Sembay, S. Deriving the Magnetopause Position from the Soft X-ray Image by Using the Tangent Fitting Approach. J. Geophys. Res. Space Phys. 2020, 125, e28169. [Google Scholar] [CrossRef]
- Guo, Y.; Sun, T.; Wang, C.; Sembay, S. Deriving the magnetopause position from wide field-of-view soft X-ray imager simulation. Sci. China Earth Sci. 2022, 65, 1601–1611. [Google Scholar] [CrossRef]
- Samsonov, A.; Carter, J.A.; Read, A.; Sembay, S.; Branduardi-Raymont, G.; Sibeck, D.; Escoubet, P. Finding Magnetopause Standoff Distance using a Soft X-ray Imager–Part 2, Methods to Analyze 2-DX-ray Images. J. Geophys. Res. Space Phys. 2022, 127, e2022JA030850. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. [Google Scholar] [CrossRef]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobile Nets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. MobileNetV 2, Inverted Residuals and Linear Bottlenecks. In Proceedings of the 2018 IEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Semantic Image Segmentation with Deep Convolutional Nets and Fully Connected CRFs. arXiv 2014, arXiv:1412.7062. [Google Scholar]
- Simonyan, K.; Zisseman, A. VeryDeep Convolutional Net-works for Large-scale Image Recognition [EB/OL]. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. arXiv 2016, arXiv:1606.00915. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Schroff, F.; Adam, H. Rethinking atrous convolution for semantic image segmentation. arXiv 2017, arXiv:1706.05587. [Google Scholar]
- Chen, L.C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 833–851. [Google Scholar]
- Wang, J.; Liu, X. Medical image recognition and segmentation of pathological slices of gastric cancer based on Deeplab v3+ neural network. Comput. Methods Programs Biomed. 2021, 207, 106210. [Google Scholar] [CrossRef]
- Shoushtari, F.K.; Sina, S.; Dehkordi, A.N. Automatic segmentation of glioblastoma multiform brain tumor in MRI images: Using Deeplabv3+ with pre-trained Resnet18 weights. Phys. Med. 2022, 100, 51–63. [Google Scholar] [CrossRef]
- Jung, Y.J.; Kim, M.J. Deeplab v3+ Based Automatic Diagnosis Model for Dental X-ray: Preliminary Study. J. Magn. 2020, 25, 632–638. [Google Scholar] [CrossRef]
- Hu, Y.Q.; Guo, X.C.; Wang, C. On the ionospheric and reconnection potentials of the Earth: Results from global MHD simulations. J. Geophys. Res. 2007, 112, A07215. [Google Scholar] [CrossRef]
- Cravens, T.E. Comet Hyakutake X-ray source: Charge transfer of solar wind heavy ions. Geophys. Res. Lett. 1997, 100, 24105–24108. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, T.; Carter, J.A.; Sembay, S.; Koutroumpa, D.; Ji, L.; Liu, W.; Wang, C. Dynamical response of solar wind charge exchange soft X-ray emission in Earth’s magnetosphere to the solar wind proton flux. Astrophys. J. 2023, 948, 69. [Google Scholar] [CrossRef]
- Cravens, T.E. Heliospheric X-ray Emission Associated with Charge Transfer of the Solar Wind with Interstellar Neutrals. Astrophys. J. 2000, 532, L153–L156. [Google Scholar] [CrossRef]
- Cravens, T.E.; Robertson, I.P.; Snowden, S.L. Temporal variations of geocoronal and heliospheric X-ray emission associated with the solar wind interaction with neutrals. J. Geophys. Res. 2001, 106, 24883–24892. [Google Scholar] [CrossRef]
- Sun, T.R.; Wang, C.; Wei, F.; Sembay, S. X-ray imaging of Kelvin-Helmholtz waves at the magnetopause. J. Geophys. Res. Space Phys. 2015, 120, 266–275. [Google Scholar] [CrossRef]
- Sun, T.; Wang, X.; Wang, C. Tangent directions of the cusp boundary derived from the simulated soft X-ray image. J. Geophys. Res. Space Phys. 2021, 126, e28314. [Google Scholar] [CrossRef]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate attention for efficient mobile network design. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 21 June 2021; pp. 13713–13722. [Google Scholar]
- Zhang, Y.; Sun, T.; Carter, J.A.; Liu, W.; Sembay, S.; Ji, L.; Wang, C. The Relationship between Solar Wind Charge Exchange Soft X-ray Emission and the Tangent Direction of Magnetopause in an XMM–Newton Event. Magnetochemistry 2023, 9, 88. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Solar Wind Density | Intergration Time T = 30 s | Intergration Time T = 60 s | Intergration Time T = 120 s | Intergration Time T = 240 s |
|---|---|---|---|---|
| 5 | 100 | 200 | 100 | 100 |
| 6 | 100 | 200 | 100 | 100 |
| …… | ||||
| 29 | 100 | 200 | 100 | 100 |
| 30 | 100 | 200 | 100 | 100 |
| Pure Background | 100 | 200 | 100 | 100 |
| Solar Wind Density | MHD | 30 s | 60 s | 120 s | 240 s | ||||
|---|---|---|---|---|---|---|---|---|---|
| Traditional | Ours | Traditional | Ours | Traditional | Ours | Traditional | Ours | ||
| 5 | 10.15 | 6 | 10.25 | 8.65 | 10.2 | 6 | 10.15 | 8.85 | 10.15 |
| 12 | 9.2 | 6 | 9.3 | 6 | 9.3 | 6 | 9.35 | 8.85 | 9.35 |
| 20 | 8.4 | 8.3 | 8.4 | 8.35 | 8.4 | 8.35 | 8.45 | 8.5 | 8.4 |
| 30 | 7.7 | 8.1 | 7.8 | 8.1 | 7.9 | 8.05 | 7.9 | 7.95 | 7.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Sun, T.; Niu, W.; Guo, Y.; Yang, S.; Peng, X.; Yang, Z. Magnetopause Detection under Low Solar Wind Density Based on Deep Learning. Remote Sens. 2023, 15, 2771. https://doi.org/10.3390/rs15112771
Zhang Y, Sun T, Niu W, Guo Y, Yang S, Peng X, Yang Z. Magnetopause Detection under Low Solar Wind Density Based on Deep Learning. Remote Sensing. 2023; 15(11):2771. https://doi.org/10.3390/rs15112771
Chicago/Turabian StyleZhang, Yujie, Tianran Sun, Wenlong Niu, Yihong Guo, Song Yang, Xiaodong Peng, and Zhen Yang. 2023. "Magnetopause Detection under Low Solar Wind Density Based on Deep Learning" Remote Sensing 15, no. 11: 2771. https://doi.org/10.3390/rs15112771
APA StyleZhang, Y., Sun, T., Niu, W., Guo, Y., Yang, S., Peng, X., & Yang, Z. (2023). Magnetopause Detection under Low Solar Wind Density Based on Deep Learning. Remote Sensing, 15(11), 2771. https://doi.org/10.3390/rs15112771