
Spatiotemporal Characteristics of the Mud Receiving Area Were Retrieved by InSAR and Interpolation

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Analysis Method
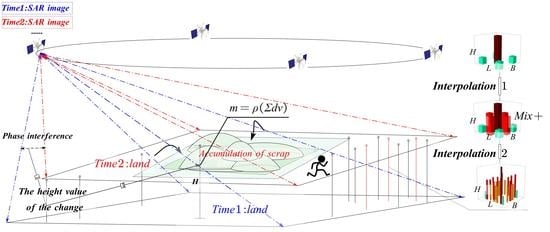
2.2.1. Differential Radar Interferometry (D-InSAR) and TS-InSAR
2.2.2. Analysis of Variance for Randomized Block Design
2.2.3. Interpolation and Optimization
3. Results and Analyse
3.1. D-InSAR Spatial and Temporal Analysis of Sludge Area
3.2. Inversion of Seawall Road Settlement Using TS-InSAR
3.3. Integration Feasibility Assessment
3.4. Optimization and Interpolation
4. Discussion
5. Conclusions
- The dredging operation process of the channel should be reasonably standardized to avoid the occurrence of uneven accumulation, and the increase in sediment mobility will lead to the degradation of the surrounding land and the flooding of flooding.
- Areas close to water are favorable locations for urban development, and the risk of mud areas increases the possibility of flooding, thereby causing disasters to surrounding fields and villages [50], and waterproofing projects such as rivers can be built according to demand.
- Disaster assessment should be done in a timely manner for road sections with too fast road subsidence [51], such as coastal disaster vulnerability and social vulnerability index.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Adi, N.; Tarang, K.; David, M.; Scott, B. Numerical feasibility study for dredging and maintenance alternatives in Everett Harbor and Snohomish River. Reg. Stud. Mar. Sci. 2022, 56, 102695. [Google Scholar] [CrossRef]
- Cox, J.R.; Lingbeek, J.; Weisscher, S.A.H.; Kleinhans, M.G. Effects of Sea-Level Rise on Dredging and Dredged Estuary Morphology. J. Geophys. Res. Earth. Surf. 2022, 127, e2022JF006790. [Google Scholar] [CrossRef]
- Albert, P.; Jorge, G.; Pere, P.; Ruth, D. Effects of long-lasting massive dumping of dredged material on bottom sediment and water turbidity during port expansion works. Ocean Coast Manag. 2022, 223, 106113. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Hwang, C.; Han, J.; Kao, R.; Wu, C.-R.; Shih, H.-C.; Tangdamrongsub, N. Sediment-Mass Accumulation Rate and Variability in the East China Sea Detected by GRACE. Remote Sens. 2016, 8, 777. [Google Scholar] [CrossRef] [Green Version]
- Shahzal, H.; Nadeem, S.; Ammar, A.; Muhammad, A.; Abrar, H.; Rahman, S.M.L.U.; Zohreh, R.; Rehman, T.M.A.U. Prediction of the Amount of Sediment Deposition in Tarbela Reservoir Using Machine Learning Approaches. WATER-SUI 2022, 14, 3098. [Google Scholar] [CrossRef]
- Li, J.; Zhou, L.; Zhu, Z.; Qin, J.; Xian, L.; Zhang, D.; Huang, L. Surface Deformation Mechanism Analysis in Shanghai Areas Based on TS-InSAR Technology. Remote Sens. 2022, 14, 4368. [Google Scholar] [CrossRef]
- Su, X.; Zhang, Y.; Meng, X.; Rehman, M.U.; Khalid, Z.; Yue, D. Updating Inventory, Deformation, and Development Characteristics of Landslides in Hunza Valley, NW Karakoram, Pakistan by SBAS-InSAR. Remote Sens. 2022, 14, 4907. [Google Scholar] [CrossRef]
- Luo, Q.; Li, J.; Zhang, Y. Monitoring Subsidence over the Planned Jakarta–Bandung (Indonesia) High-Speed Railway Using Sentinel-1 Multi-Temporal InSAR Data. Remote Sens. 2022, 14, 4138. [Google Scholar] [CrossRef]
- Huang, C.; Zhang, G.; Zhao, D.; Shan, X.; Xie, C.; Tu, H.; Chen, J. Rupture Process of the 2022 Mw6.6 Menyuan, China, Earthquake from Joint Inversion of Accelerogram Data and InSAR Measurements. Remote Sens. 2022, 14, 5104. [Google Scholar] [CrossRef]
- Gao, H.; Liao, M.; Feng, G. An Improved Quadtree Sampling Method for InSAR Seismic Deformation Inversion. Remote Sens. 2021, 13, 1678. [Google Scholar] [CrossRef]
- Song, S.; Bai, L.; Yang, C. Characterization of the Land Deformation Induced by Groundwater Withdrawal and Aquifer Parameters Using InSAR Observations in the Xingtai Plain, China. Remote Sens. 2022, 14, 4488. [Google Scholar] [CrossRef]
- Ana, A.; Gregorio, B.; Andrés, F.; Maurizio, B. Volcanic unrest at Nevados de Chillán (Southern Andean Volcanic Zone) from January 2019 to November 2020, imaged by DInSAR. J. Volcanol. Geotherm. Res. 2022, 427, 107568. [Google Scholar]
- Wang, L.; Teng, C.; Jiang, K.; Jiang, C.; Zhu, S. D-InSAR Monitoring Method of Mining Subsidence Based on Boltzmann and Its Application in Building Mining Damage Assessment. KSCE J. Civ. Eng. 2022, 26, 353–370. [Google Scholar] [CrossRef]
- Yao, J.; Yao, X.; Wu, Z.; Liu, X. Research on Surface Deformation of Ordos Coal Mining Area by Integrating Multitemporal D-InSAR and Offset Tracking Technology. J. Sens. 2021, 2021, 6660922. [Google Scholar] [CrossRef]
- Afaq, H.M.; Zhanlong, C.; Ying, Z.; Muhammad, S.; Junwei, M.; Ijaz, A.; Aamir, A.; Junaid, K. PS-InSAR Based Monitoring of Land Subsidence by Groundwater Extraction for Lahore Metropolitan City, Pakistan. Remote Sens. 2022, 14, 3950. [Google Scholar]
- Li, F.; Liu, G.; Gong, H.; Chen, B.; Zhou, C. Assessing Land Subsidence-Inducing Factors in the Shandong Province, China, by Using PS-InSAR Measurements. Remote Sens. 2022, 14, 2875. [Google Scholar] [CrossRef]
- Khan, S.D.; Gadea, O.C.; Tello Alvarado, A.; Tirmizi, O.A. Surface Deformation Analysis of the Houston Area Using Time Series Interferometry and Emerging Hot Spot Analysis. Remote Sens. 2022, 14, 3831. [Google Scholar] [CrossRef]
- Wang, H.; Li, K.; Zhang, J.; Hong, L.; Chi, H. Monitoring and Analysis of Ground Surface Settlement in Mining Clusters by SBAS-InSAR Technology. Sensors 2022, 22, 3711. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zuo, X.; Xiong, P.; Chen, Z.; Yang, F.; Li, X. Monitoring Land Subsidence in North-central Henan Plain using the SBAS-InSAR Method with Sentinel-1 Imagery Data. J. Indian Chem. Soc. 2022, 50, 635–655. [Google Scholar] [CrossRef]
- Liu, Z.; Mei, G.; Sun, Y.; Xu, N. Investigating mining-induced surface subsidence and potential damages based on SBAS-InSAR monitoring and GIS techniques: A case study. Environ. Sci. Technol. 2021, 80, 817. [Google Scholar] [CrossRef]
- Karaca, S.O.; Abir, I.A.; Khan, S.D.; Ozsayın, E.; Qureshi, K.A. Neotectonics of the Western Suleiman Fold Belt, Pakistan: Evidence for Bookshelf Faulting. Remote Sens. 2021, 13, 3593. [Google Scholar] [CrossRef]
- Zhang, P.; Guo, Z.; Guo, S.; Xia, J. Land Subsidence Monitoring Method in Regions of Variable Radar Reflection Characteristics by Integrating PS-InSAR and SBAS-InSAR Techniques. Remote Sens. 2022, 14, 3265. [Google Scholar] [CrossRef]
- Ma, J.; Yang, J.; Zhu, Z.; Cao, H.; Li, S.; Du, X. Decision-making fusion of InSAR technology and offset tracking to study the deformation of large gradients in mining areas-Xuemiaotan mine as an example. Front. Earth Sci. 2021, 80, 817. [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Chen, Y. InSAR Atmospheric Delay Correction Model Integrated from Multi-Source Data Based on VCE. Remote Sens. 2022, 14, 4329. [Google Scholar] [CrossRef]
- Lee, J.L.; Stokoe, K.H., II; Bay, J.A. The Rolling Dynamic Deflectometer: A tool for continuous deflection profiling of pavements. Stand Alone 2005, 3, 1745–1748. [Google Scholar]
- Katicha, S.W.; Loulizi, A.; Khoury, J.E.; Flintsch, G.W. Adaptive False Discovery Rate for Wavelet Denoising of Pavement Continuous Deflection Measurements. J. Comput. Civ. Eng. 2016, 31, 04016049. [Google Scholar] [CrossRef]
- Paul, A.; Warbal, P.; Mukherjee, A.; Paul, S.; Saha, R.K. Exploring polynomial based interpolation schemes for photoacoustic tomographic image reconstruction. Biomed. Phys. Eng. Express 2021, 8, 015019. [Google Scholar] [CrossRef] [PubMed]
- Olivier, R. Evaluation of Rounding Functions in Nearest Neighbor Interpolation. Int. J. Comput. Methods 2021, 18, 2150024. [Google Scholar]
- Nan, W. The use of bilinear interpolation filter to remove image noise. J. Phys. Conf. Ser. 2022, 2303, 012089. [Google Scholar]
- Wan, A.; Chen, H.; Xie, X.; Liu, Y. Effects of water systems and roads on Linpan distribution based on buffer analysis. Environ. Dev. Sustain. 2021, 24, 7349–7360. [Google Scholar] [CrossRef]
- Thango, B.A. Application of the Analysis of Variance (ANOVA) in the Interpretation of Power Transformer Faults. Energies 2022, 15, 7224. [Google Scholar] [CrossRef]
- Antonio, B.; Barbara, S.; Leonardo, P.; Milena, S.; Rosaria, C.M. Using regression and Multifactorial Analysis of Variance to assess the effect of ascorbic, citric, and malic acids on spores and activated spores of Alicyclobacillusacidoterrestris. Food Microbiol. 2023, 110, 104158. [Google Scholar]
- Kaihotsu, I.; Asanuma, J.; Aida, K.; Oyunbaatar, D. Evaluation of the AMSR2 L2 soil moisture product of JAXA on the Mongolian Plateau over seven years (2012–2018). SN Appl. Sci. 2019, 1, 1477. [Google Scholar] [CrossRef] [Green Version]
- Du, Z.; Ge, L.; Ng, A.H.-M.; Li, X. Satellite-based Estimates of Ground Subsidence in Ordos Basin, China. J. Appl. Geod. 2017, 11, 9–20. [Google Scholar] [CrossRef]
- Du, G.; Li, N. Subsidence monitoring in the Ordos basin using integrated SAR differential and time-series interferometry techniques. Remote Sens Lett. 2016, 7, 180–189. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, X.; Li, M.; Zhou, Z.; Chen, B.; Xie, H. Risk assessment of geological disasters along the G213 maoxian-wenchuan section based on GF-6 data. ISPRS Ann.Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 3, 163–169. [Google Scholar] [CrossRef]
- Yang, W.; Ding, R.; Zhou, Z.; Li, L.; Shi, S.; Wang, M.; Zhang, Q.; Geng, Y. Improved Attribute Interval Evaluation Theory for Risk Assessment of Geological Disasters in Underground Engineering and Its Application. Geotech. Geol. Eng. 2020, 38, 2465–2477. [Google Scholar] [CrossRef]
- Yu, W.; Gong, H.; Chen, B.; Zhou, C.; Zhang, Q. Combined GRACE and MT-InSAR to Assess the Relationship between Groundwater Storage Change and Land Subsidence in the Beijing-Tianjin-Hebei Region. Remote Sens. 2021, 13, 3773. [Google Scholar] [CrossRef]
- Xia, Y.; Wang, Y.; Du, S.; Liu, X.; Zhou, H. Integration of D-InSAR and GIS technology for identifying illegal underground mining in Yangquan District, Shanxi Province, China. Environ. Earth SCI. 2018, 77, 319. [Google Scholar] [CrossRef]
- Panou, G.; Korakitis, R. Cartesian to geodetic coordinates conversion on a triaxial ellipsoid using the bisection method. J. Geod. 2022, 96, 66. [Google Scholar] [CrossRef]
- Skeivalas, J. Accuracy of 3D geodetic coordinates transformation algorithms. Geodesy Cartogr. 2012, 31, 54–56. [Google Scholar] [CrossRef] [Green Version]
- Canisius, F.; Brisco, B.; Murnaghan, K.; Kooij, M.V.D.; Keizer, E. SAR Backscatter and InSAR Coherence for Monitoring Wetland Extent, Flood Pulse and Vegetation: A Study of the Amazon Lowland. Remote Sens. 2019, 11, 720. [Google Scholar] [CrossRef] [Green Version]
- John, A.F.; Sa’d, H.; Ali, A.; John, E.; Amine, B.M.E.; Xin, W. The Effect of Micro-Alloying and Surface Finishes on the Thermal Cycling Reliability of Doped SAC Solder Alloys. Materials 2022, 15, 6759. [Google Scholar]
- Deng, H.; Li, R.; Liu, H.; He, Y.; Yang, C.; Li, X.; Xu, Z.; Kan, R. Optical amplification enables a huge sensitivity improvement to laser heterodyne radiometers for high-resolution measurements of atmospheric gases. Opt. Lett. 2022, 47, 4335–4338. [Google Scholar] [CrossRef]
- Kodeeswari, M.; Philemon, D. Image processing-based framework for continuous lane recognition in mountainous roads for driver assistance system. J. Electron. Imaging 2017, 26, 063011. [Google Scholar]
- Xingyu, H.; Ningning, T.; Tao, L. Moving target inverse synthetic aperture radar image resolution enhancement based on two-dimensional block sparse signal reconstruction. IET Image Process. 2021, 15, 3153–3159. [Google Scholar]
- Qian, P.; Zhilin, L.; Jun, C.; Wanzeng, L. Complexity-based matching between image resolution and map scale for multiscale image-map generation. Int. J. Geogr. Inf. Sci. 2021, 35, 1951–1974. [Google Scholar]
- Jasmina, S.; Nikola, T.; Lars, G.; Thomas, K. Requirements for the use of impact-based forecasts and warnings by road maintenance services in Germany. ASR 2022, 19, 97–103. [Google Scholar]
- Bathrellos, G.D.; Skilodimou, H.D. Land Use Planning for Natural Hazards. Land 2019, 8, 128. [Google Scholar] [CrossRef] [Green Version]
- Bathrellos, G.D.; Karymbalis, E.; Skilodimou, H.D.; Gaki-Papanastassiou, K.; Baltas, E.A. Urban flood hazard assessment in the basin of Athens Metropolitan city, Greece. Environ. Earth Sci. 2016, 75, 319. [Google Scholar] [CrossRef]
- Tragaki, A.; Gallousi, C.; Karymbalis, E. Coastal hazard vulnerability assessment based on geomorphic, oceanographic and demographic parameters: The case of the Peloponnese (Southern Greece). Land 2018, 7, 56. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Project | The Control Value of the Vertical Displacement | ||||
|---|---|---|---|---|---|
| Absolute Value (mm) | Rate of Change (mm/Month) | Cumulative Value/mm | |||
| Earthen embankment | 10 10 | ±10 ±10 | ±10 ±10 | ||
| HaiDi road | 10 | ±10 | ±10 | ||
| Level | I | II | III | IV | V |
| Sedimentation rate (mm/a) | 0–10 | 10–15 | 15–20 | 20–25 | >25 |
| Degree grading | slight | average | severe | More severe | Extremely serious |
| Level Measurement Time | Master Image | Slave Image | Imagery Parameters | Time Baseline /d | Spatial Baseline/m |
|---|---|---|---|---|---|
| 20210810 | 20210806 | 20211017 | File type: SLC Polarization: VV Beam Mode: IW (TOPS mode) Direction: Ascending Subtype: SA Angle of incidence 21° | 72 | −19.580 |
| 20211017 | 20211017 | 20211204 | 48 | 41.365 | |
| 20211208 | 20211204 | 20211228 | 24 | 26.748 | |
| 20211226 | 20211228 | 20220121 | 24 | 12.218 | |
| 20220122 | 20220121 | 20220202 | 12 | 56.617 | |
| 20220204 | 20220202 | 20220226 | 24 | −139.093 | |
| 20220225 | 20220226 | 20220310 | 12 | 17.996 | |
| 20220309 | 20220310 | 20220403 | 24 | −55.028 | |
| 20220403 | 20220403 | 20220509 | 36 | 76.386 |
| Dependent Variable: Settlement | |||||
|---|---|---|---|---|---|
| The Source | Class III Sum of Squares | Degrees of Freedom | The Mean Square | F | Significant |
| Correction model | 28.722 | 6 | 4.787 | 4.972 | 0.021 |
| intercept | 129.948 | 1 | 129.948 | 134.969 | 0.000 |
| Point | 28.219 | 4 | 7.055 | 7.327 | 0.009 |
| Method | 0.502 | 2 | 0.251 | 0.261 | 0.777 |
| error | 7.702 | 8 | 0.963 | ||
| total | 166.373 | 15 | |||
| Total after correction | 36.424 | 14 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, B.; Qiao, Z. Spatiotemporal Characteristics of the Mud Receiving Area Were Retrieved by InSAR and Interpolation. Remote Sens. 2023, 15, 351. https://doi.org/10.3390/rs15020351
Hu B, Qiao Z. Spatiotemporal Characteristics of the Mud Receiving Area Were Retrieved by InSAR and Interpolation. Remote Sensing. 2023; 15(2):351. https://doi.org/10.3390/rs15020351
Chicago/Turabian StyleHu, Bo, and Zhongya Qiao. 2023. "Spatiotemporal Characteristics of the Mud Receiving Area Were Retrieved by InSAR and Interpolation" Remote Sensing 15, no. 2: 351. https://doi.org/10.3390/rs15020351
APA StyleHu, B., & Qiao, Z. (2023). Spatiotemporal Characteristics of the Mud Receiving Area Were Retrieved by InSAR and Interpolation. Remote Sensing, 15(2), 351. https://doi.org/10.3390/rs15020351