
Non-Ellipsoidal Infrared Group/Extended Target Tracking Based on Poisson Multi-Bernoulli Mixture Filter and B-Spline


Abstract
:1. Introduction
- (1)
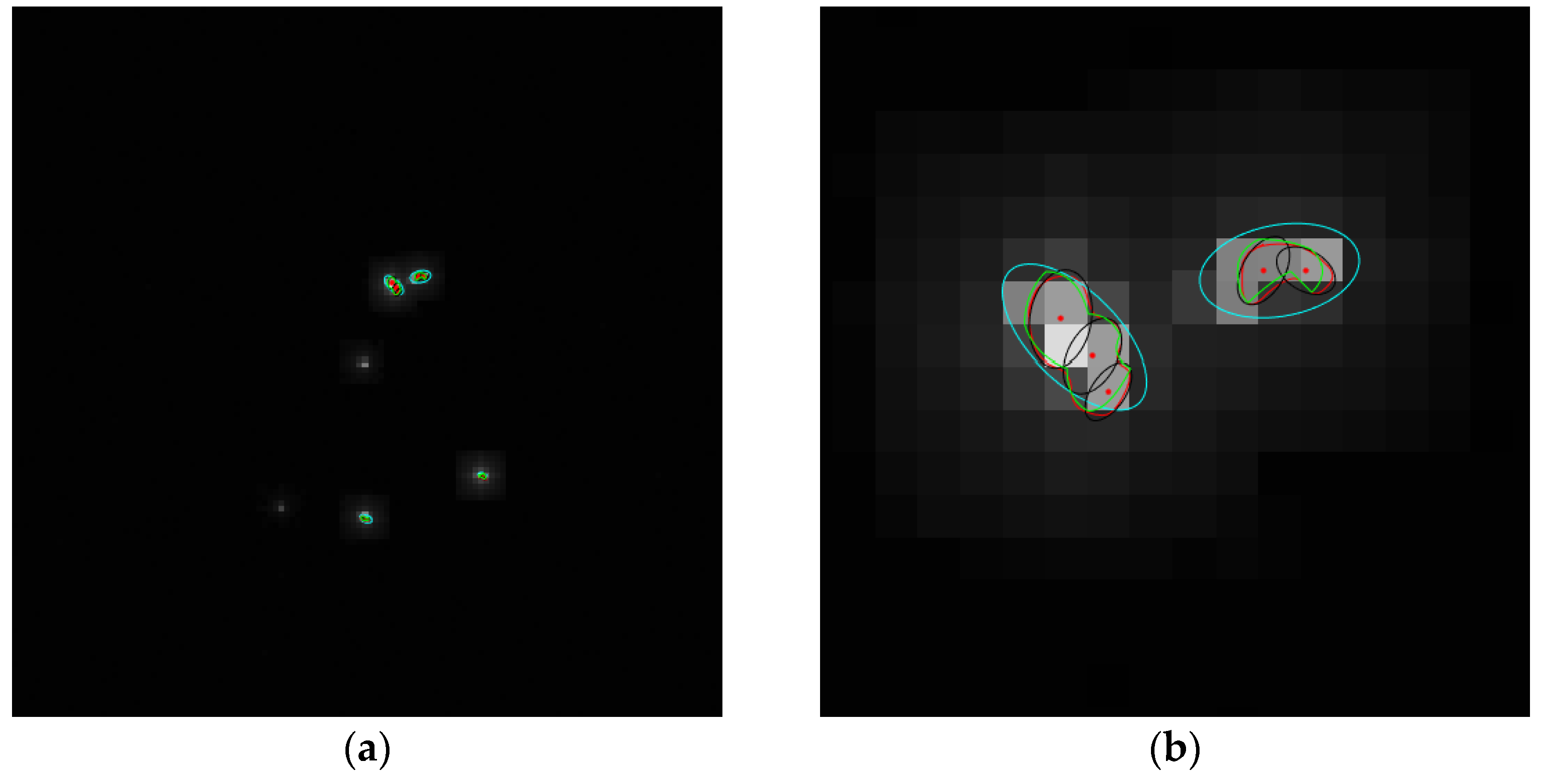
- The B-spline is applied to model the extension of extended targets, thus solving the inaccurate modeling of targets with an arbitrary shape. In addition, the performance is also improved using this algorithm.
- (2)
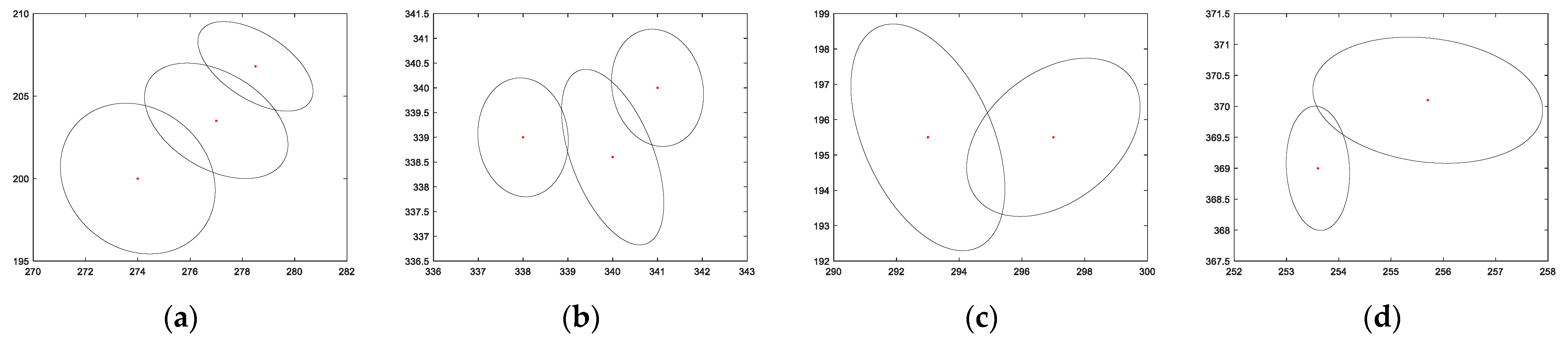
- The amplitude information is introduced to partition the measurement, which can accurately partition the measurement set, especially when the targets are close.
- (3)
- The updated prediction and likelihood formulas of the algorithm based on the B-spline model are derived.
2. Background
2.1. PMBM Density
2.1.1. Standard Extended Target Measurement Model
2.1.2. Standard Extended Target Dynamic Model
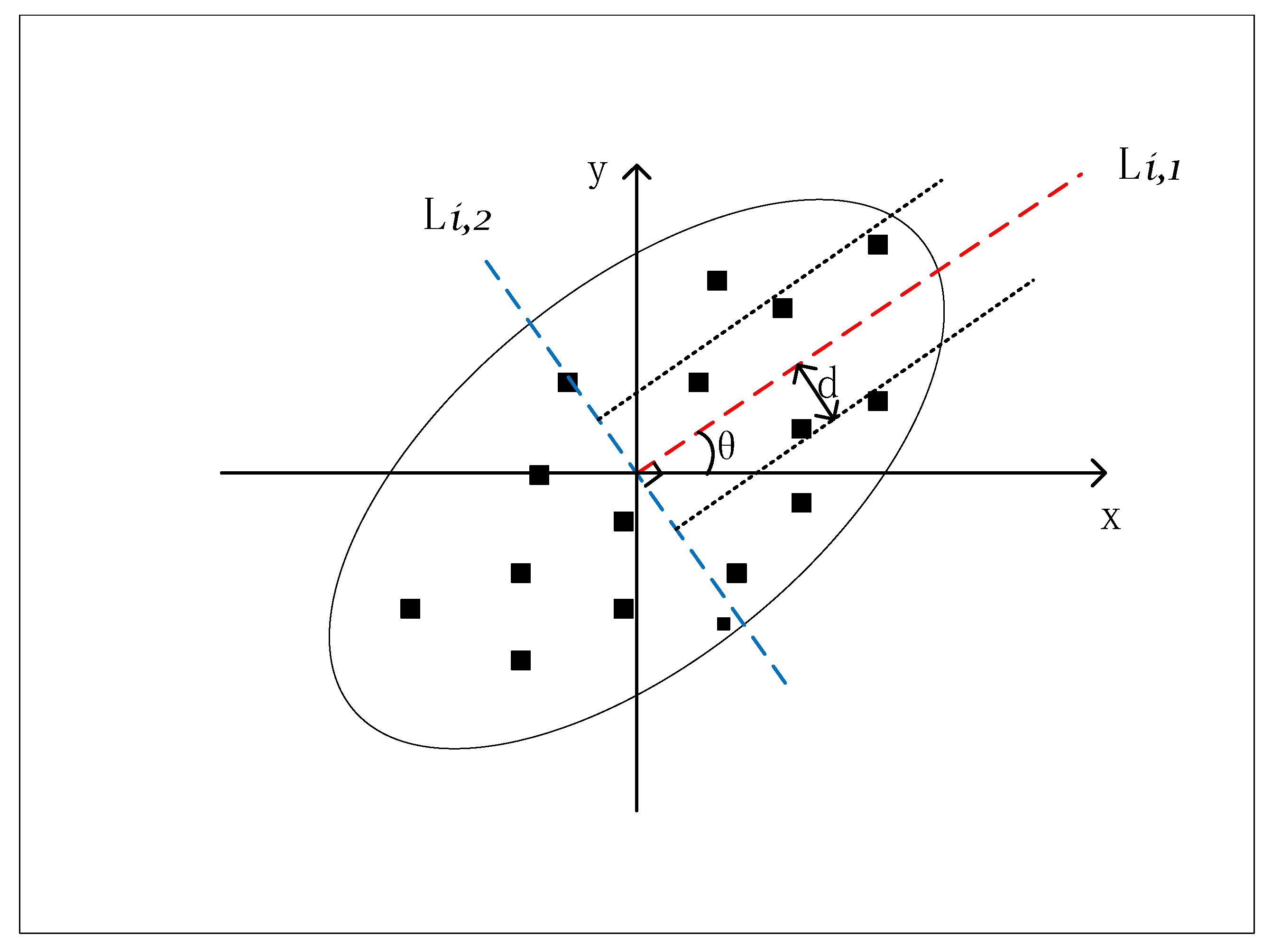
2.1.3. Amplitude-Aided Measurement Partitioning
2.1.4. PMBM Filter for Extended Target
- A.
- Prediction process
- B.
- Updated process
2.2. B-Spline
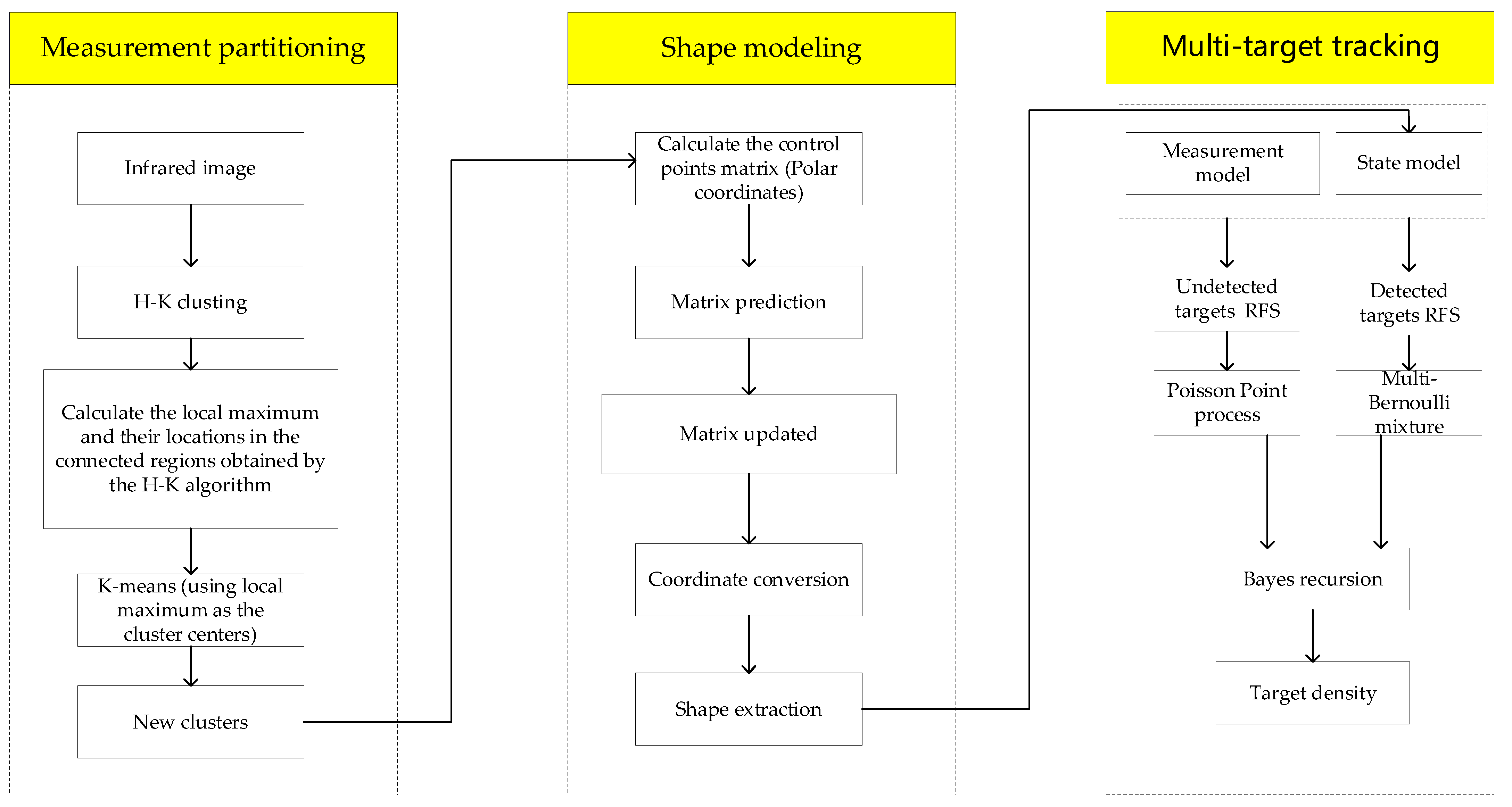
3. Proposed Algorithm
3.1. Single Extended Target
3.2. GGS-PMBM Filter
4. Results
4.1. Scenario 1 (No-Crossing Track)
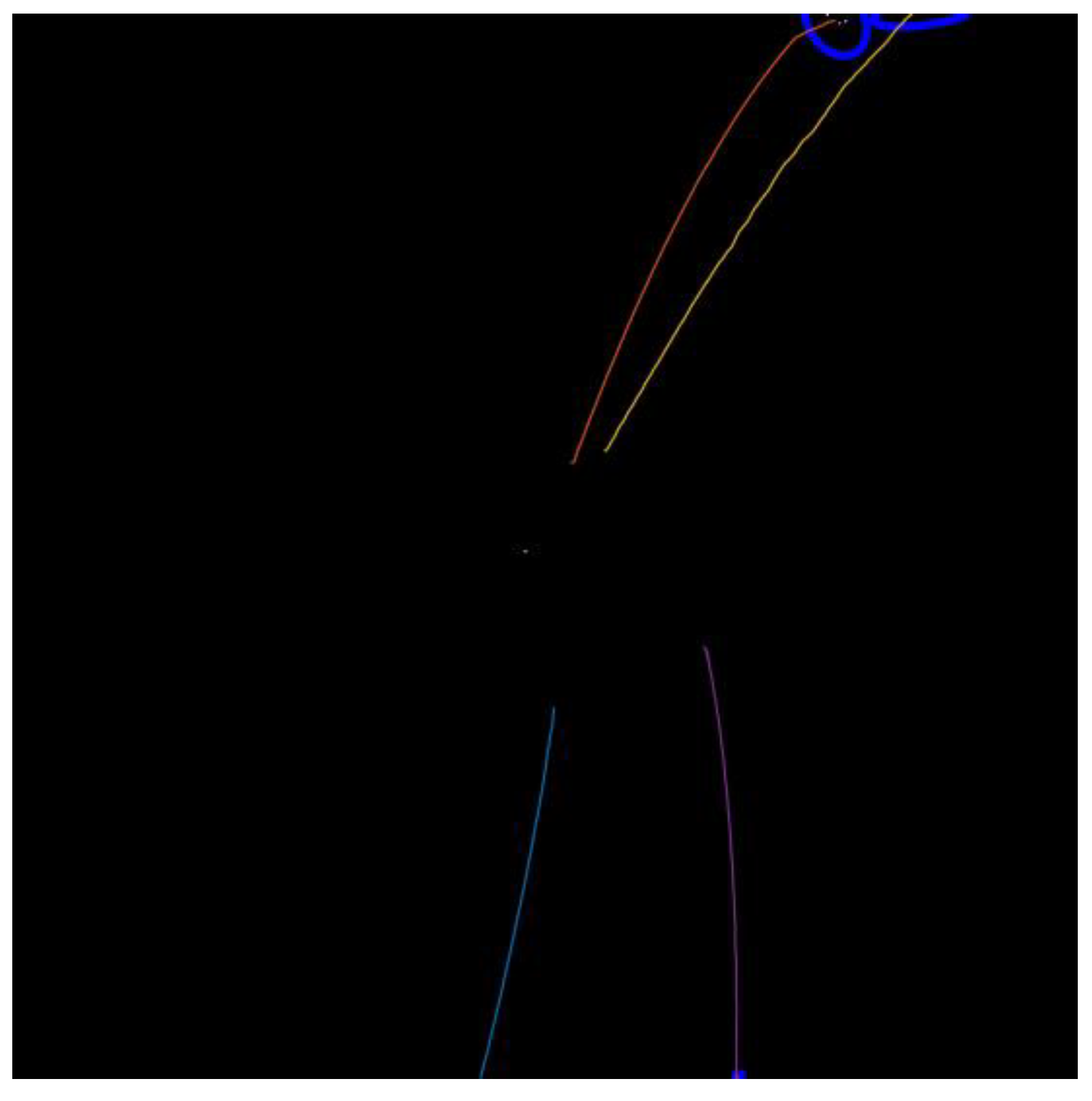
4.2. Scenario 2 (Crossing Tracks)
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vo, B.-N.; Mallick, M.; Bar-Shalom, Y.; Coraluppi, S.; Osborne, R.; Mahler, R.; Vo, B.-T. Multitarget tracking. Wiley Encycl. Electr. Electron. Eng. 2015, 2015. [Google Scholar]
- Bouraya, S.; Belangour, A. Multi object tracking: A survey. In Proceedings of the Thirteenth International Conference on Digital Image Processing (ICDIP 2021), Singapore, 20–23 May 2021; pp. 142–152. [Google Scholar]
- Granstrom, K.; Baum, M.; Reuter, S. Extended object tracking: Introduction, overview and applications. arXiv 2016, arXiv:00970. [Google Scholar]
- Liang, Z.; Liu, F.; Li, L.; Gao, J. Improved generalized labeled multi-Bernoulli filter for non-ellipsoidal extended targets or group targets tracking based on random sub-matrices. Digit. Signal Process. 2020, 99, 102669. [Google Scholar] [CrossRef]
- Granström, K.; Fatemi, M.; Svensson, L. Poisson multi-Bernoulli mixture conjugate prior for multiple extended target filtering. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 208–225. [Google Scholar] [CrossRef] [Green Version]
- Granström, K.; Lundquist, C.; Orguner, U. Tracking rectangular and elliptical extended targets using laser measurements. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Gilholm, K.; Salmond, D.J.I.P.-R. Sonar, Navigation, Spatial distribution model for tracking extended objects. IEE Proc. Radar Sonar Navig. 2005, 152, 364–371. [Google Scholar] [CrossRef]
- Koch, J.W. Bayesian approach to extended object and cluster tracking using random matrices. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 1042–1059. [Google Scholar] [CrossRef]
- Granström, K.; Natale, A.; Braca, P.; Ludeno, G.; Serafino, F. Gamma Gaussian inverse Wishart probability hypothesis density for extended target tracking using X-band marine radar data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6617–6631. [Google Scholar] [CrossRef]
- García-Fernández, Á.F.; Williams, J.L.; Svensson, L.; Xia, Y. A Poisson multi-Bernoulli mixture filter for coexisting point and extended targets. IEEE Trans. Signal Process. 2021, 69, 2600–2610. [Google Scholar] [CrossRef]
- Beard, M.; Reuter, S.; Granström, K.; Vo, B.-T.; Vo, B.-N.; Scheel, A. Multiple extended target tracking with labeled random finite sets. IEEE Trans. Signal Process. 2015, 64, 1638–1653. [Google Scholar] [CrossRef] [Green Version]
- Lan, J.; Li, X.R. Tracking of maneuvering non-ellipsoidal extended object or target group using random matrix. IEEE Trans. Signal Process. 2014, 62, 2450–2463. [Google Scholar] [CrossRef]
- Baum, M.; Hanebeck, U.D. Extended object tracking with random hypersurface models. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 149–159. [Google Scholar] [CrossRef] [Green Version]
- Cao, X.; Lan, J.; Li, X.R. Extension-deformation approach to extended object tracking. IEEE Trans. Aerosp. Electron. Syst. 2020, 57, 866–881. [Google Scholar] [CrossRef]
- Han, Y.; Xu, H.; Hu, G.; Han, C. An Extended Target Tracking Algorithm Based on Gaussian Surface Fitting. Math. Probl. Eng. 2022, 2022. [Google Scholar] [CrossRef]
- Yang, J.-L.; Li, P.; Ge, H.-W. Extended target shape estimation by fitting B-spline curve. J. Appl. Math. 2014, 2014, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Daniyan, A.; Lambotharan, S.; Deligiannis, A.; Gong, Y.; Chen, W.-H. Bayesian multiple extended target tracking using labeled random finite sets and splines. IEEE Trans. Signal Process. 2018, 66, 6076–6091. [Google Scholar] [CrossRef] [Green Version]
- Naujoks, B.; Burger, P.; Wuensche, H.-J. Fast 3D extended target tracking using NURBS surfaces. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1104–1109. [Google Scholar]
- Yang, K.; Zhong, C.; Zhang, X.; Zhu, X.; Yue, Y. 3D modeling of riverbeds based on NURBS algorithm. In Proceedings of the 2020 3rd International Conference on Artificial Intelligence and Pattern Recognition, Xiamen, China, 26–28 June 2020; pp. 163–167. [Google Scholar]
- Piegl, L.J.I.C.G. Applications, on NURBS: A survey. IEEE Comput. Graph. 1991, 11, 55–71. [Google Scholar] [CrossRef]
- Granstrom, K.; Orguner, U. A PHD filter for tracking multiple extended targets using random matrices. IEEE Trans. Signal Process. 2012, 60, 5657–5671. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Xiao, H.; Song, Z.; Hu, R.; Fan, H. A new multiple extended target tracking algorithm using PHD filter. Signal Process. 2013, 93, 3578–3588. [Google Scholar] [CrossRef]
- Kellner, D.; Klappstein, J.; Dietmayer, K. Grid-based DBSCAN for clustering extended objects in radar data. In Proceedings of the IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 365–370. [Google Scholar]
- Williams, J.L. Marginal multi-Bernoulli filters: RFS derivation of MHT, JIPDA, and association-based MeMBer. IEEE Trans. Aerosp. Syst. 2015, 51, 1664–1687. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.-T.; Vo, B.-N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Xia, Y.; Granstrcom, K.; Svensson, L.; García-Fernández, Á.F. Performance evaluation of multi-bernoulli conjugate priors for multi-target filtering. In Proceedings of the 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 June 2017; pp. 1–8. [Google Scholar]
- García-Fernández, Á.F.; Williams, J.L.; Granström, K.; Svensson, L. Poisson multi-Bernoulli mixture filter: Direct derivation and implementation. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1883–1901. [Google Scholar] [CrossRef] [Green Version]
- Hoshen, J.; Kopelman, R. Percolation and cluster distribution. I. Cluster multiple labeling technique and critical concentration algorithm. Phys. Rev. B 1976, 14, 3438. [Google Scholar] [CrossRef]
- De Boor, C.; De Boor, C. A Practical Guide to Splines; Springer: New York, NY, USA, 1978; Volume 27. [Google Scholar]
- De Boor, C. Corrections and Emendations for a Practical Guide to Splines. Available online: https://pages.cs.wisc.edu/~deboor/pgs_errata.pdf (accessed on 16 November 2022).
- He, X.; Sithiravel, R.; Tharmarasa, R.; Balaji, B.; Kirubarajan, T. A spline filter for multidimensional nonlinear state estimation. Signal Process. 2014, 102, 282–295. [Google Scholar] [CrossRef]
- Sithiravel, R.; McDonald, M.; Balaji, B.; Kirubarajan, T. Multiple model spline probability hypothesis density filter. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1210–1226. [Google Scholar] [CrossRef]
- Sithiravel, R.; Chen, X.; Tharmarasa, R.; Balaji, B.; Kirubarajan, T. The spline probability hypothesis density filter. IEEE Trans. Signal Process. 2013, 61, 6188–6203. [Google Scholar] [CrossRef]
- Li, P.; Ge, H.-W.; Yang, J.-L.; Wang, W.J.S.P. Modified Gaussian inverse Wishart PHD filter for tracking multiple non-ellipsoidal extended targets. Signal Process. 2018, 150, 191–203. [Google Scholar] [CrossRef]
- Granström, K.; Orguner, U. On the reduction of gaussian inverse wishart mixtures. In Proceedings of the 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 2162–2169. [Google Scholar]
- Granström, K.; Orguner, U. Estimation and maintenance of measurement rates for multiple extended target tracking. In Proceedings of the 2012 15th International Conference on Information Fusion, Singapore, 9–12 July 2012; pp. 2170–2176. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input and set of detection |
| where |
| Likelihood: |
| Output: and likelihood |
| Input: |
| Output: |
| Target | State | Survival Time (Frame) |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 |
| Filter | GGS-PMBM-AP | Em-PMBM-AP | GGIW-PMBM-AP | GGS-PMBM-DP | GGS-PMBM-GBDBSCAN |
|---|---|---|---|---|---|
| Time | 10.07 s | 9.95 s | 9.91 s | 10.34 s | 9.57s |
| Target | State | Survival Time (Frame) |
|---|---|---|
| 1 | ||
| 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, X.; Gong, C.; Rao, P. Non-Ellipsoidal Infrared Group/Extended Target Tracking Based on Poisson Multi-Bernoulli Mixture Filter and B-Spline. Remote Sens. 2023, 15, 606. https://doi.org/10.3390/rs15030606
Wang Y, Chen X, Gong C, Rao P. Non-Ellipsoidal Infrared Group/Extended Target Tracking Based on Poisson Multi-Bernoulli Mixture Filter and B-Spline. Remote Sensing. 2023; 15(3):606. https://doi.org/10.3390/rs15030606
Chicago/Turabian StyleWang, Yi, Xin Chen, Chao Gong, and Peng Rao. 2023. "Non-Ellipsoidal Infrared Group/Extended Target Tracking Based on Poisson Multi-Bernoulli Mixture Filter and B-Spline" Remote Sensing 15, no. 3: 606. https://doi.org/10.3390/rs15030606
APA StyleWang, Y., Chen, X., Gong, C., & Rao, P. (2023). Non-Ellipsoidal Infrared Group/Extended Target Tracking Based on Poisson Multi-Bernoulli Mixture Filter and B-Spline. Remote Sensing, 15(3), 606. https://doi.org/10.3390/rs15030606