
Physics-Based Satellite-Derived Bathymetry (SDB) Using Landsat OLI Images


Abstract
:
1. Introduction
2. Methods
2.1. Sampling Optically Deep Water Pixels
2.2. Atmospheric Correction
2.2.1. Atmospheric Radiative Transfer over Coastal Zone
2.2.2. Aerosol Optical Depth Inversion Based on Dark Water Concept
2.3. Conversion to Subsurface Remote Sensing Reflectance
2.4. Ocean Optical Inversion of Inherent Optical Properties
2.4.1. Subsurface Reflectance Model of IOPs
2.4.2. Ocean Optical Models of Inherent Optical Properties
2.4.3. Nonlinear Optimization for Inherent Optical Properties
2.4.4. Bounded Nonnegative Solution
2.4.5. Levenberg–Marquardt Nonlinear Optimization
2.4.6. Diffuse Attenuation Coefficient from Inherent Optical Properties
2.5. Satellite Derived Bathymetry
2.5.1. Reflectance Model of Optically Shallow Coastal Water
2.5.2. Bottom Reflectance Modeling
2.5.3. Nonlinear Optimization for SDB Solution
3. Results and Discussion
3.1. Study Sites and Validation Data
3.2. Atmospheric Correction of Optically Deep Water
3.3. Inversion of Optical Properties of Water
3.4. Effect of Physical Parameters
3.5. Initial Result
3.6. Estimation of Scene-Derived Bottom Reflectance
3.7. SDB Result Using Scene-Derived Bottom Reflectance Endmember
3.8. SDB over Incomplete or Missing DEM Area
3.9. Additional Examples of SDB
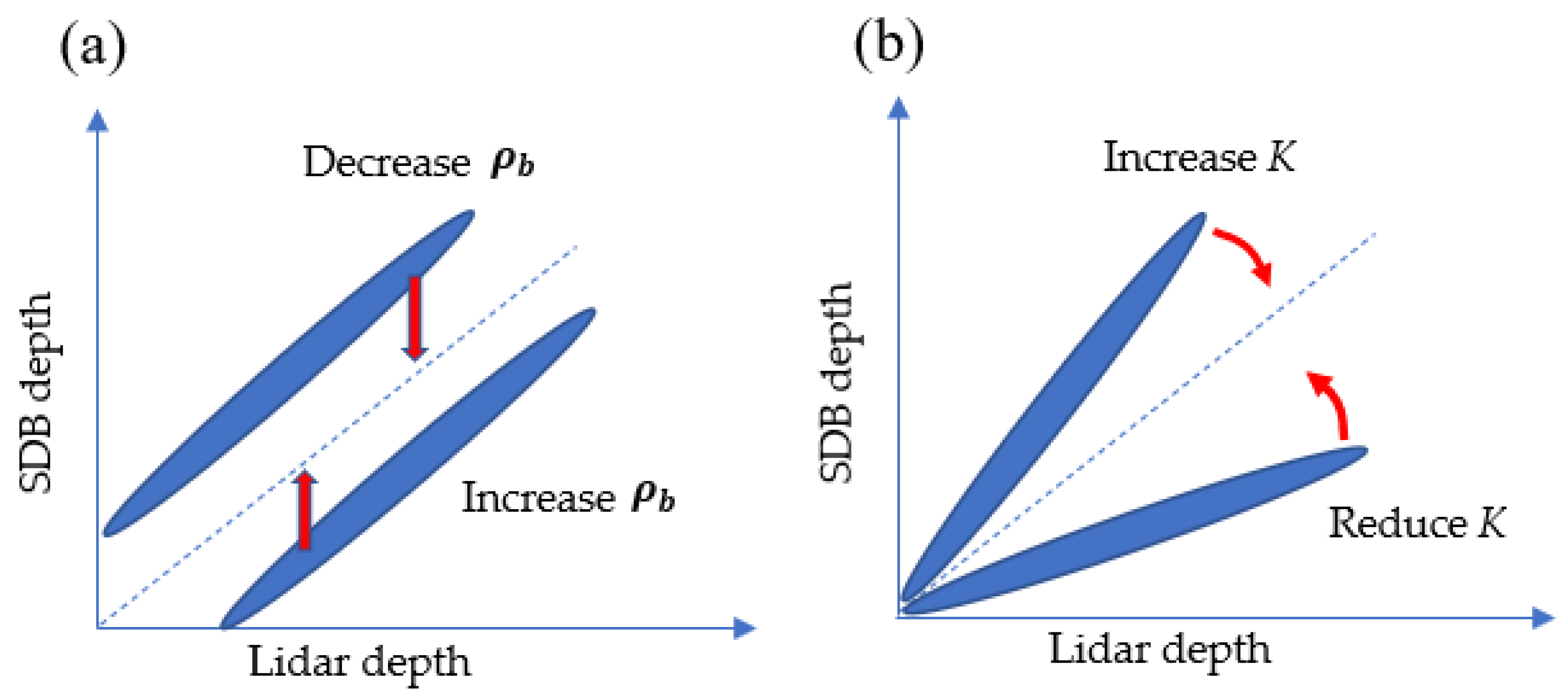
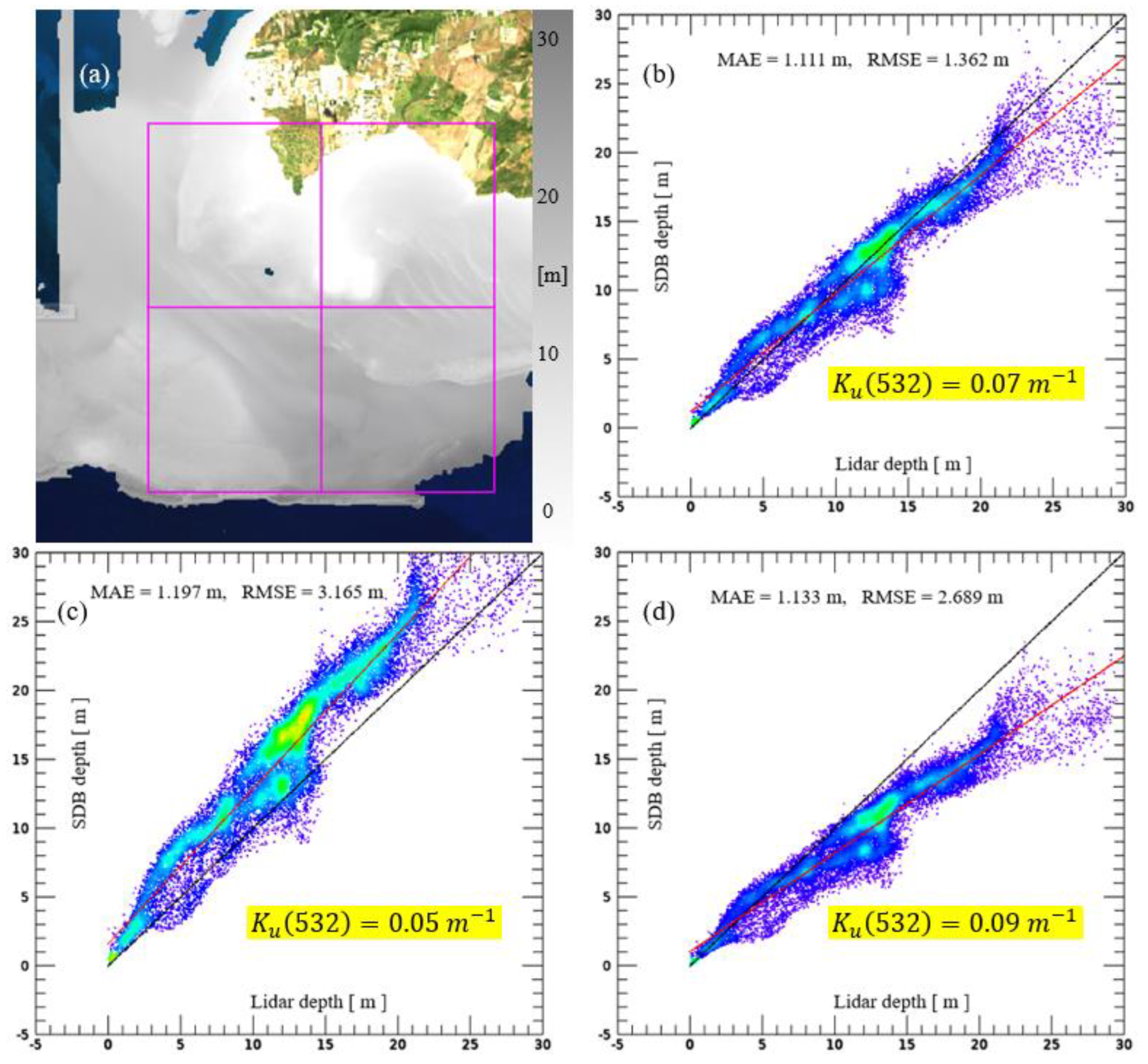
3.10. Fine-Tuning Strategies Using TBDEM
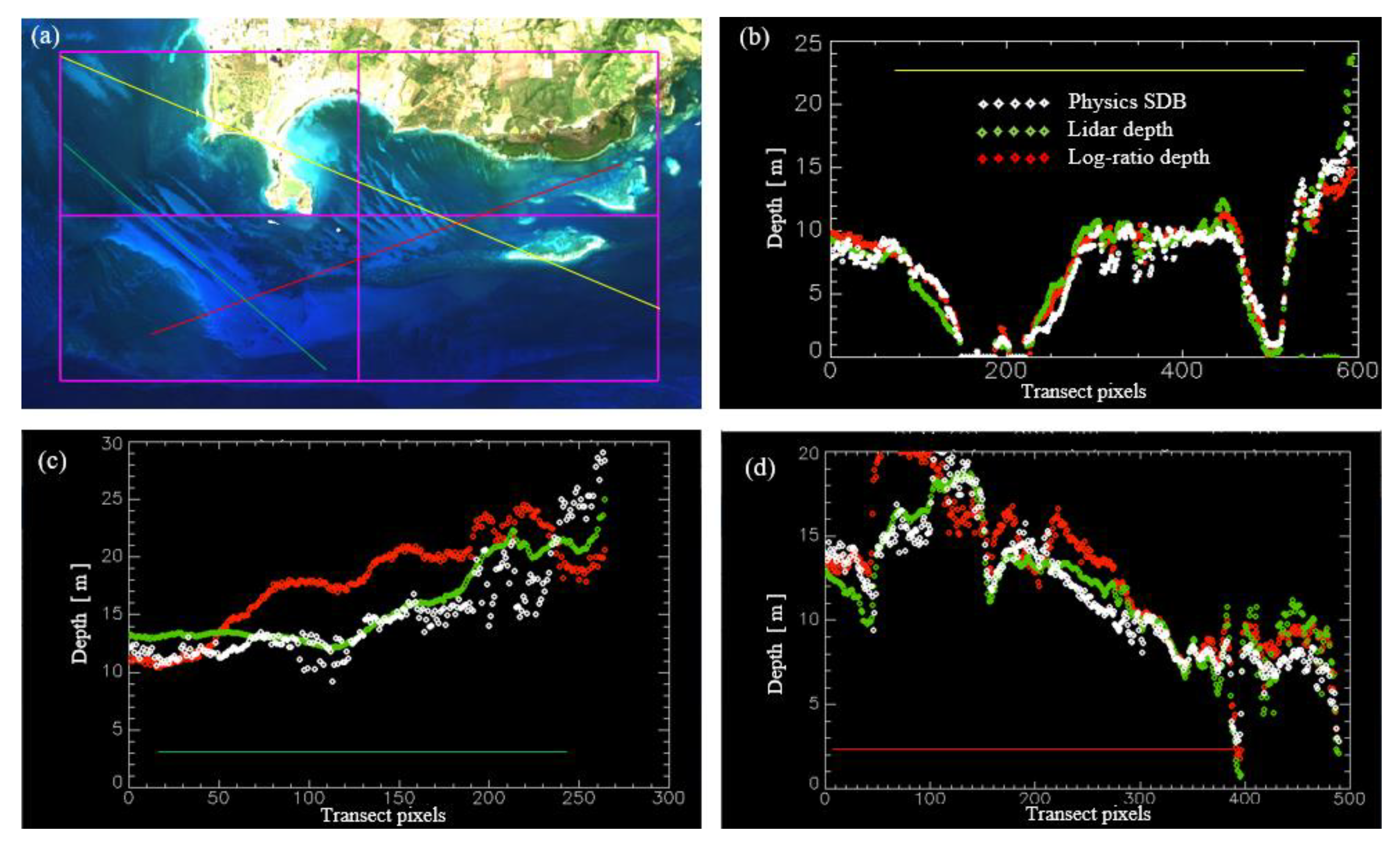
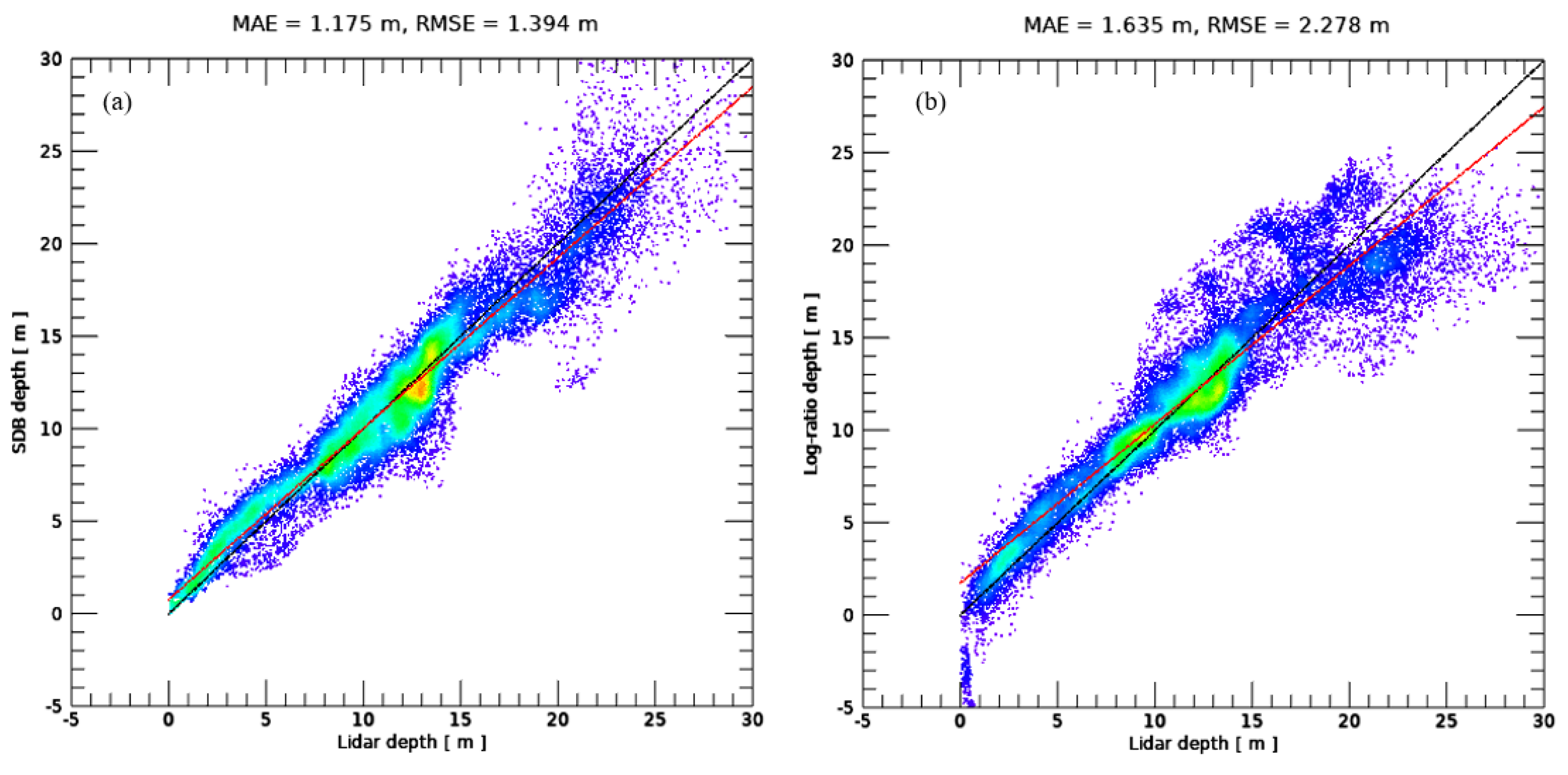
3.11. Comparison with Log-Ratio Method
3.12. Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef]
- Lyzenga, D.; Malinas, N.; Tanis, F. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Ashphaq, M.; Srivastava, P.K.; Mitra, D. Review of near-shore satellite derived bathymetry: Classification and account of five decades of coastal bathymetry research. J. Ocean Eng. Sci. 2021, 6, 340–359. [Google Scholar] [CrossRef]
- USGS Earth Explorer. Available online: https://earthexplorer.usgs.gov/ (accessed on 20 January 2024).
- USGS GloVis. Available online: https://glovis.usgs.gov/ (accessed on 20 January 2024).
- LandsatLook Viewer. Available online: https://landsatlook.usgs.gov/ (accessed on 20 January 2024).
- Berk, A.; Conforti, P.; Kennett, R.; Perkins, T.; Hawes, F.; van den Bosch, J. MODTRAN6: A major upgrade of the MODTRAN radiative transfer code. In SPIE 9088, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XX, 90880H (13 June 2014); SPIE: Bellingham, WA, USA, 2014. [Google Scholar] [CrossRef]
- Berk, A.; Conforti, P.; Hawes, F. An accelerated line-by-line option for MODTRAN combining on-the-fly generation of line center absorption with 0.1 cm−1 bins and pre-computed line tails. In SPIE 9471, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXI, 947217 (21 May 2015); SPIE: Bellingham, WA, USA, 2015. [Google Scholar] [CrossRef]
- Kotchenova, S.Y.; Vermote, E.F.; Matarrese, R.; Klemm, E.F., Jr. Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data. Part I: Path Radiance. Appl. Opt. 2006, 45, 6726–6774. [Google Scholar] [CrossRef] [PubMed]
- Kotchenova, S.Y.; Vermote, E.F. Validation of a vector version of the 6S radiative transfer code for atmospheric correction of satellite data. Part II: Homogeneous Lambertian and anisotropic surfaces. Appl. Opt. 2007, 46, 4455–4464. [Google Scholar] [CrossRef]
- Ahmad, Z.; Fraser, R.S. An iterative radiative transfer code for ocean–atmosphere systems. J. Atmos. Sci. 1982, 39, 656–665. [Google Scholar] [CrossRef]
- Gao, B.C.; Montes, M.J.; Ahmad, Z.; Davis, C.O. Atmospheric correction algorithm for hyperspectral remote sensing of ocean color from space. Appl. Opt. 2000, 39, 887–896. [Google Scholar] [CrossRef]
- Montes, M.J.; Gao, B.C.; Davis, C.O. Atmospheric Correction Algorithms: Tafkaa User’s Guide, NRL/MR/7230—04-8760. Available online: https://apps.dtic.mil/sti/pdfs/ADA422084.pdf (accessed on 20 January 2024).
- Lee, Z.-P. (Ed.) Remote Sensing of Inherent Optical Properties: Fundamentals, Tests of Algorithms, and Applications; Reports of the International Ocean-Colour Coordinating Group, No. 5; IOCCG: Dartmouth, NS, Canada, 2006. [Google Scholar]
- Gordon, H.R.; Brown, O.B.; Evans, R.H.; Brown, J.W.; Smith, R.C.; Baker, K.S.; Clark, D.K. A semianalytic radiance model of ocean color. J. Geophys. Res. 1988, 93, 10909–10924. [Google Scholar] [CrossRef]
- Mobley, C.D. Light and Water: Radiative Transfer in Natural Waters; Academic: San Diego, CA, USA, 1994. [Google Scholar]
- Kim, M.; Park, J.Y.; Tuell, G. A Constrained Optimization Technique for Estimating Environmental Parameters from CZMIL Hyperspectral and Lidar Data, Hyperspectral and Ultraspectral Imagery XVI, 769513; SPIE: Bellingham, WA, USA, 2010. [Google Scholar] [CrossRef]
- Donald, M. An algorithm for least-squares estimation of nonlinear parameters. SIAM J. Appl. Math. 1963, 11, 431–441. [Google Scholar]
- Mobley, C.D.; Sundman, L.K.; Davis, C.O.; Bowles, J.H.; Downes, T.V.; Leathers, R.A.; Montes, M.J.; Bissett, W.P.; Kohler, D.D.R.; Reid, R.P.; et al. Interpretation of hyperspectral remote-sensing imagery by spectrum matching and look-up tables. Appl. Opt. 2005, 4, 3576–3592. [Google Scholar] [CrossRef]
- International Hydrographic Organization IHO. S-44 IHO Standards for Hydrographic Surveys Edition 6.1.0; International Hydrographic Organization: Monaca, France, 2022; Available online: https://iho.int/uploads/user/pubs/standards/s-44/S-44_Edition_6.1.0.pdf (accessed on 20 January 2024).
- Philpot, W.D. Bathymetric Mapping with Passive Multispectral Imagery. Appl. Opt. 1989, 28, 1569–1578. [Google Scholar] [CrossRef]
- Maritorena, S.; Morel, A.; Gentili, B. Diffuse reflectance of oceanic shallow waters: Influence of water depth and bottom albedo. Limnol. Oceanogr. 1994, 39, 1689–1703. [Google Scholar] [CrossRef]
- Morel, A.; Maritorena, S. Bio-optical properties of oceanic waters: A reappraisal. J. Geophys. Res. Ocean. 2001, 106, 7163–7180. [Google Scholar] [CrossRef]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7445. [Google Scholar] [CrossRef] [PubMed]
- Mobley, C.D.; Sundman, L.K. Hydrolight 5 Ecolight 5 Technical Documentation; Sequoia Scientific, Inc.: Bellevue, WA, USA, 2008; p. 100. [Google Scholar]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters. 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Sathyendranath, S. (Ed.) Remote Sensing of Ocean Colour in Coastal, and Other Optically-Complex, Waters; Reports of the International Ocean-Colour Coordinating Group, No. 3; IOCCG: Dartmouth, NS, Canada, 2000. [Google Scholar]
- Huang, R.; Yu, K.; Wang, Y.; Wang, J.; Mu, L.; Wang, W. Bathymetry of the coral reefs of Weizhou Island based on multispectral satellite images. Remote Sens. 2017, 9, 750. [Google Scholar] [CrossRef]
- Garcia, R.A.; Lee, Z.; Hochberg, E.J. Hyperspectral shallow-water remote sensing with an enhanced benthic classifier. Remote Sens. 2018, 10, 147. [Google Scholar] [CrossRef]
- Wang, Y.; He, X.; Bai, Y.; Li, T.; Wang, D.; Zhu, Q.; Gong, F. Satellite-Derived Bottom Depth for Optically Shallow Waters Based on Hydrolight Simulations. Remote Sens. 2022, 14, 4590. [Google Scholar] [CrossRef]
- Hedley, J.D.; Roelfsema, C.; Phinn, S.R. Efficient radiative transfer model inversion for remote sensing applications. Remote Sens. Environ. 2009, 113, 2527–2532. [Google Scholar] [CrossRef]
- Eugenio, F.; Martin, J.; Marcello, J.; Fraile-Nuez, E. Environmental monitoring of El Hierro Island submarine volcano, by combining low and high resolution satellite imagery. Int. J. Appl. Earth Obs. Geoinform. 2014, 29, 53–66. [Google Scholar] [CrossRef]
- Klonowski, W.M.; Fearns, P.R.; Lynch, M.J. Retrieving key benthic cover types and bathymetry from hyperspectral imagery. J. Appl. Remote Sens. 2007, 1, 011505. [Google Scholar] [CrossRef]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics-based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Name | Unit |
|---|---|---|
| Top of the atmosphere (TOA) reflectance | Unitless | |
| TOA radiance | [W m−2 nm−1 sr−1] | |
| Earth to Sun distance | AU | |
| Solar zenith angle | Radian | |
| Exoatmospheric solar irradiance | [W m−2 nm−1] | |
| View zenith angle | Radian | |
| Aerosol optical depth at 550 nm | Unitless | |
| Column ozone | [DU] | |
| Column water vapor | [cm] | |
| Surface pressure | Millibars | |
| Atmospheric and water surface reflectance | Unitless | |
| Atmospheric spherical albedo | Unitless | |
| Transmission by absorption of other gases | Unitless | |
| Transmission by absorption of ozone | Unitless | |
| Transmission by absorption of water vapor | Unitless | |
| Transmission by scattering (sun to surface) | Unitless | |
| Transmission by scattering (surface to sensor) | Unitless | |
| Bottom of the atmosphere (BOA) reflectance | Unitless | |
| Above-water remote sensing reflectance | [sr−1] | |
| Subsurface remote sensing reflectance | [sr−1] | |
| Coefficients of quadratic IOP’s model for | Unitless | |
| Backward scattering to total forward attenuation | Unitless | |
| Total absorption coefficient | [m−1] | |
| Total backward scattering coefficient | [m−1] | |
| Absorption coefficient due to pure water | [m−1] | |
| Absorption coefficient due to detritus and gelbstoff | [m−1] | |
| Exponential coefficient of function | [nm−1] | |
| Absorption coefficient due to phytoplankton | [m−1] | |
| Chlorophyll-a concentration | [mg m3] | |
| Normalized absorption by average phytoplankton | [m−1] | |
| Backward scattering due to pure water | [m−1] | |
| Scattering coefficient due to suspended particulate | [m−1] | |
| Power coefficient of function | Unitless | |
| Difference between measured and modeled | N/A | |
| Physical parameter | N/A | |
| Generic parameter for bounded solution of | N/A | |
| Jacobian for derivative-based optimization | N/A | |
| Downward diffuse attenuation coefficient | [m−1] | |
| Upward diffuse attenuation coefficient | [m−1] | |
| In-water refracted solar zenith angle (SZA) | [radian] | |
| In-water refracted view zenith angle (VZA) | [radian] | |
| Refractive index of coastal water | Unitless | |
| from optically deep water | [sr−1] | |
| Geometrical depth of optically shallow water | [m] | |
| Bottom albedo | Unitless | |
| Proportion of sand-like and grass-like bottom | Unitless | |
| Bottom albedo of sand-like and grass-like bottom | Unitless | |
| Weight vector for all bands, | Unitless | |
| Number of wave bands | Unitless |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.; Danielson, J.; Storlazzi, C.; Park, S. Physics-Based Satellite-Derived Bathymetry (SDB) Using Landsat OLI Images. Remote Sens. 2024, 16, 843. https://doi.org/10.3390/rs16050843
Kim M, Danielson J, Storlazzi C, Park S. Physics-Based Satellite-Derived Bathymetry (SDB) Using Landsat OLI Images. Remote Sensing. 2024; 16(5):843. https://doi.org/10.3390/rs16050843
Chicago/Turabian StyleKim, Minsu, Jeff Danielson, Curt Storlazzi, and Seonkyung Park. 2024. "Physics-Based Satellite-Derived Bathymetry (SDB) Using Landsat OLI Images" Remote Sensing 16, no. 5: 843. https://doi.org/10.3390/rs16050843
APA StyleKim, M., Danielson, J., Storlazzi, C., & Park, S. (2024). Physics-Based Satellite-Derived Bathymetry (SDB) Using Landsat OLI Images. Remote Sensing, 16(5), 843. https://doi.org/10.3390/rs16050843