Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner


Abstract
:
1. Introduction
2. Study Outline
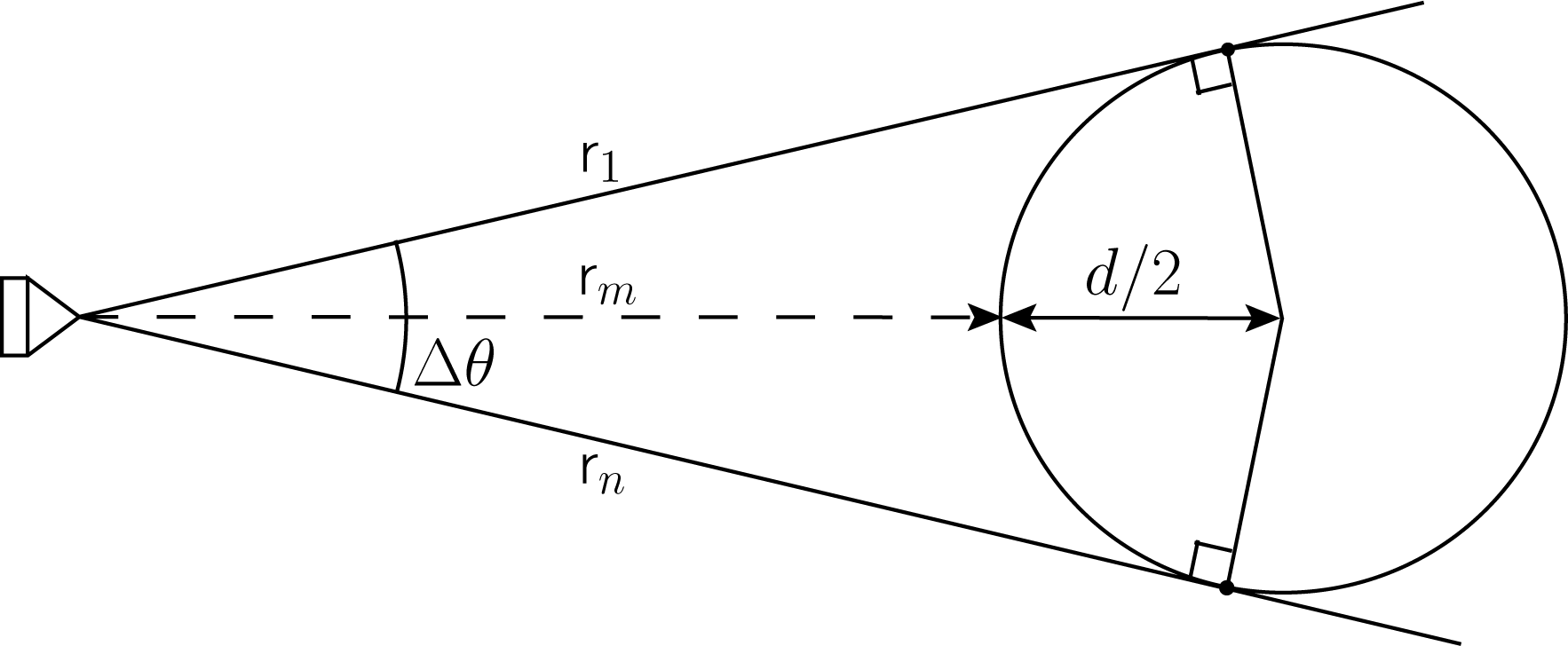
3. Tree Trunk Diameter Estimation
3.1. Existing Diameter Estimation Algorithms (DEA)
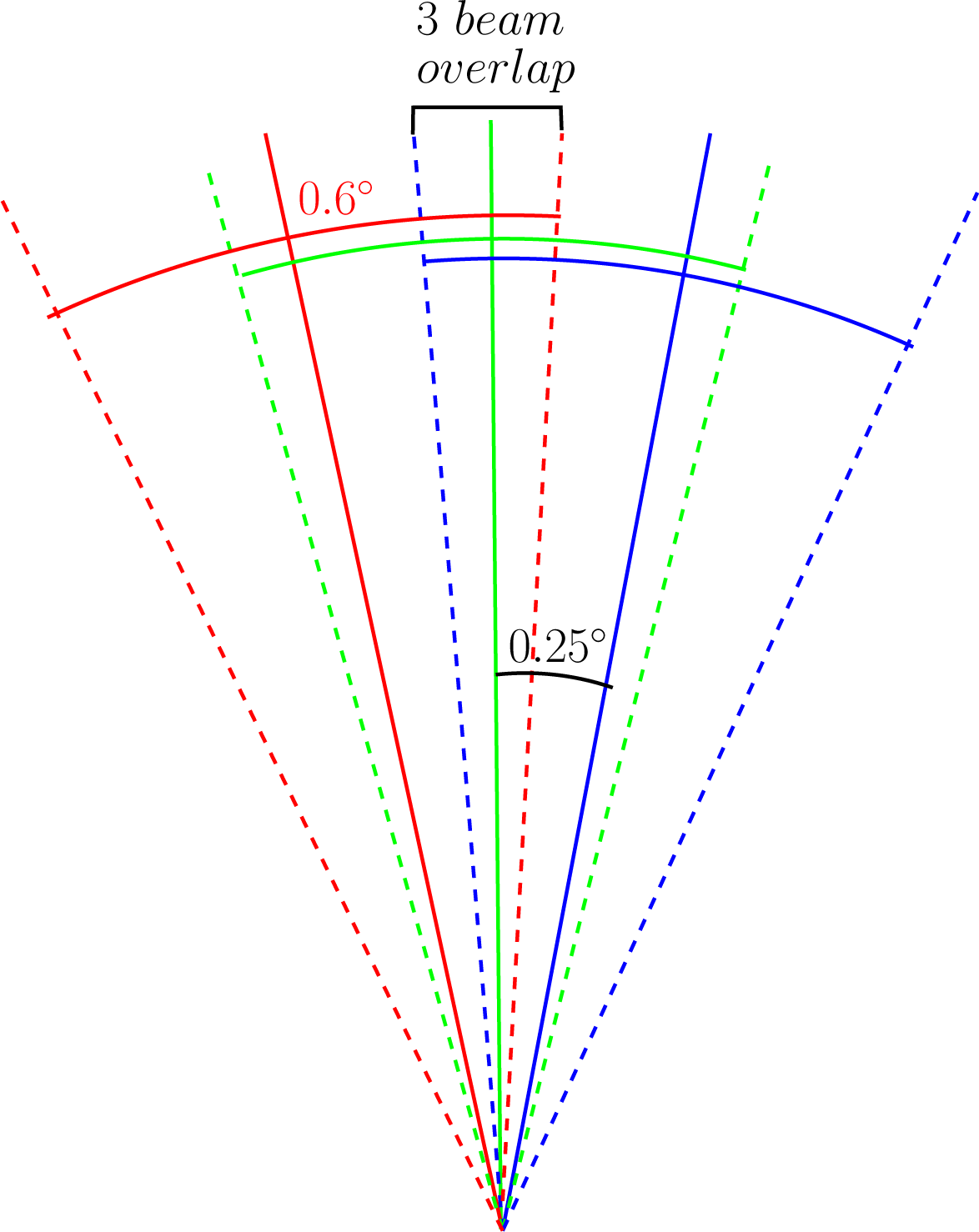
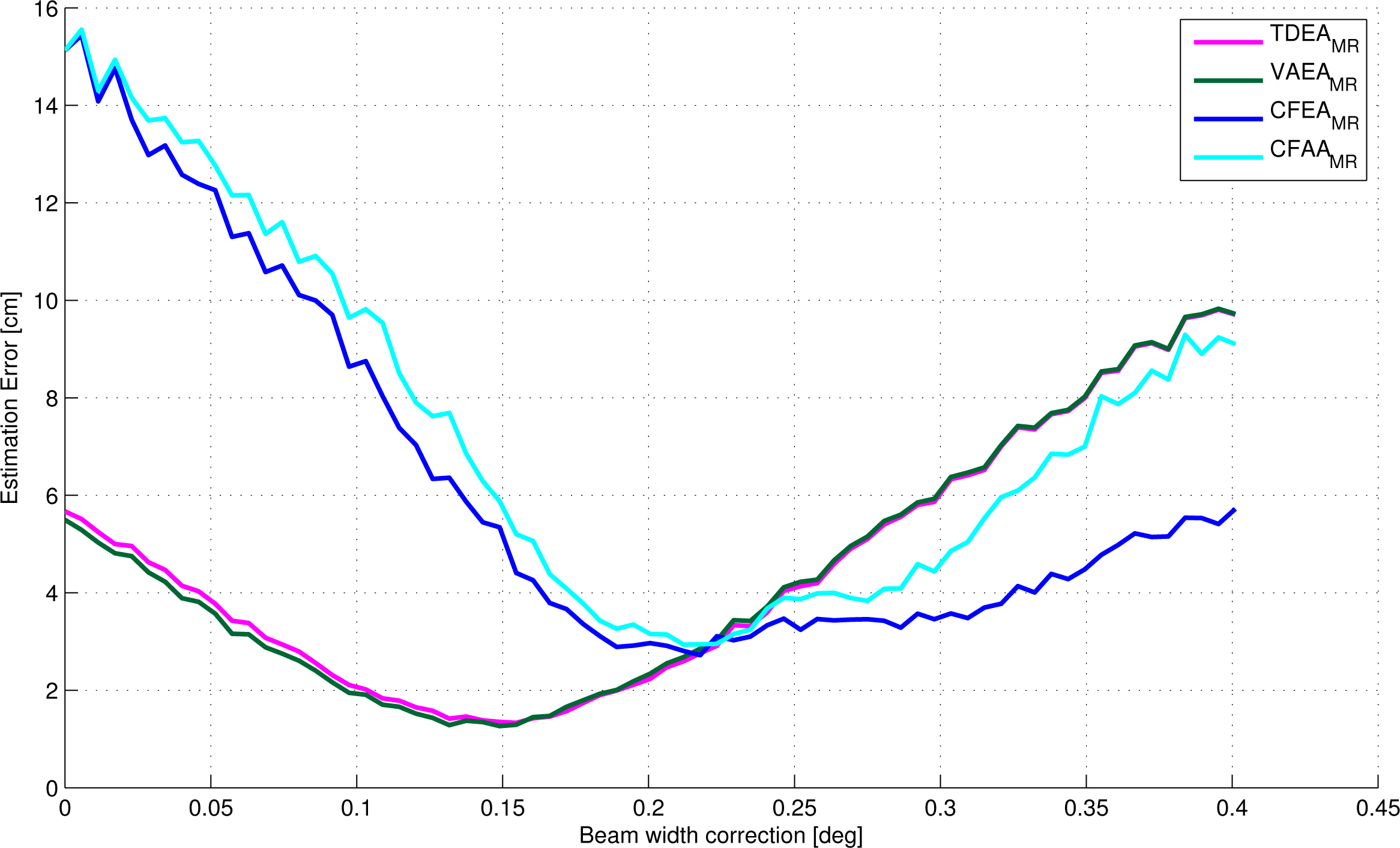
3.2. Compensation for Beam Width (BWC)
- if θi < θm then θi := θi + α
- else if θi > θmthen θi := θi − α
- if N is odd then (rm, θm) = (r, θ) for the middle beam
- else (rm, θm) = mean of (r, θ) for the two middle beams
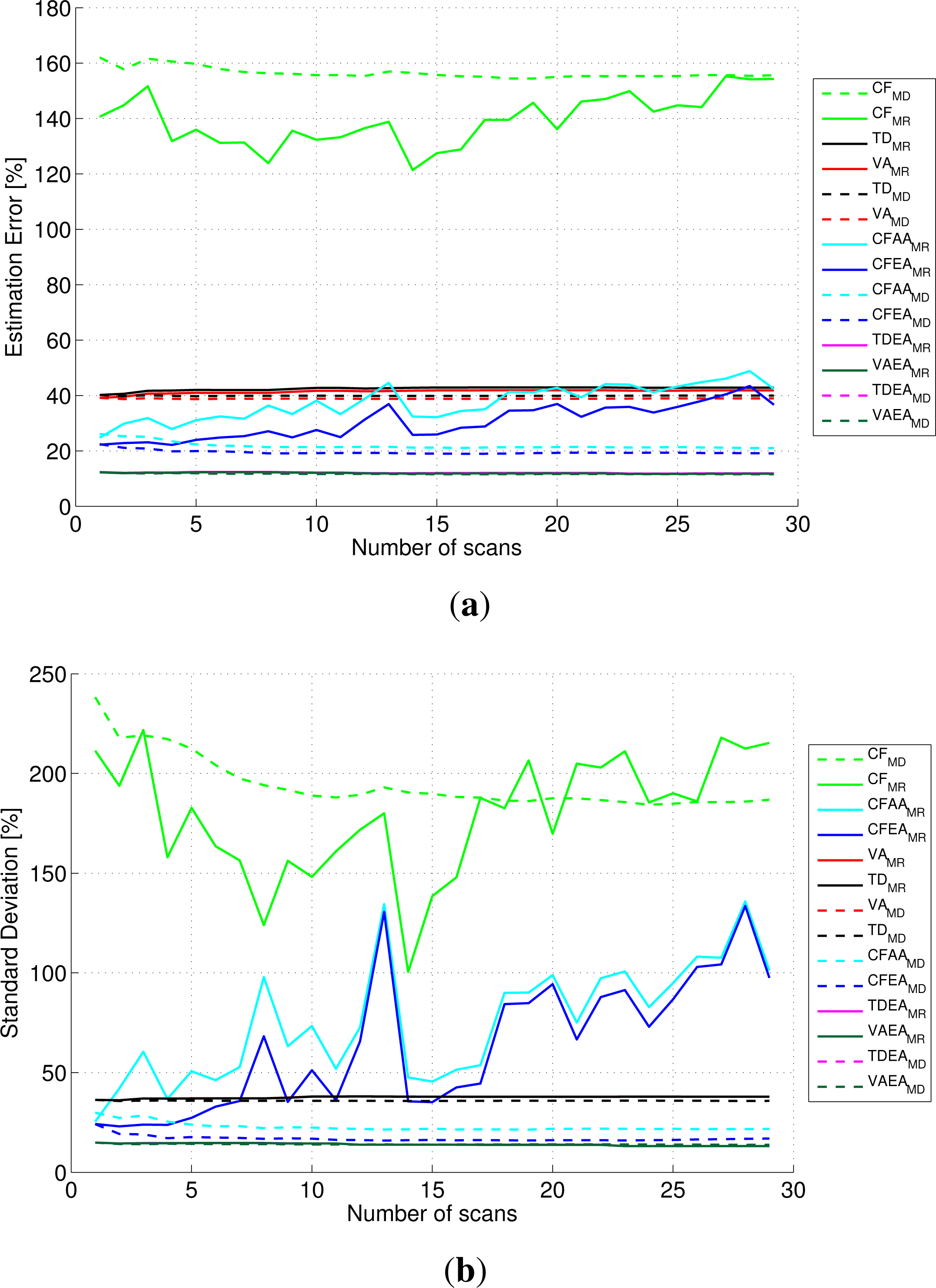
3.3. Multiple Scans (MS)
- Mean Ranges (MR): For each laser beam angle, compute and use the mean range of N scans. The motivation is that the procedure will reduce noise and errors and the effect of outliers in the range readings, and possibly lead to better diameter estimates.
- Mean Diameter (MD): Calculate diameter estimations for each one of the N scans, and report the mean value of all estimations. The assumption is that the scans are noisy and independent such that the mean of several diameter estimations is better than single estimates.
3.4. Statistical Analysis
4. Results
4.1. Optimization of Beam width Correction and Multiple Scans Parameters
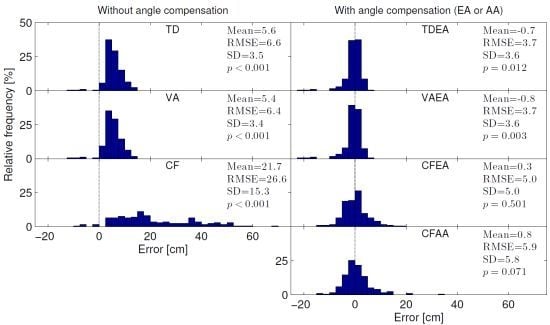
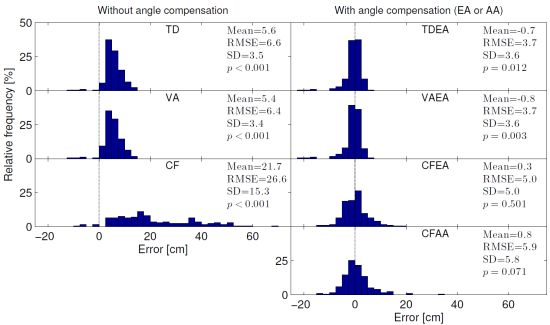
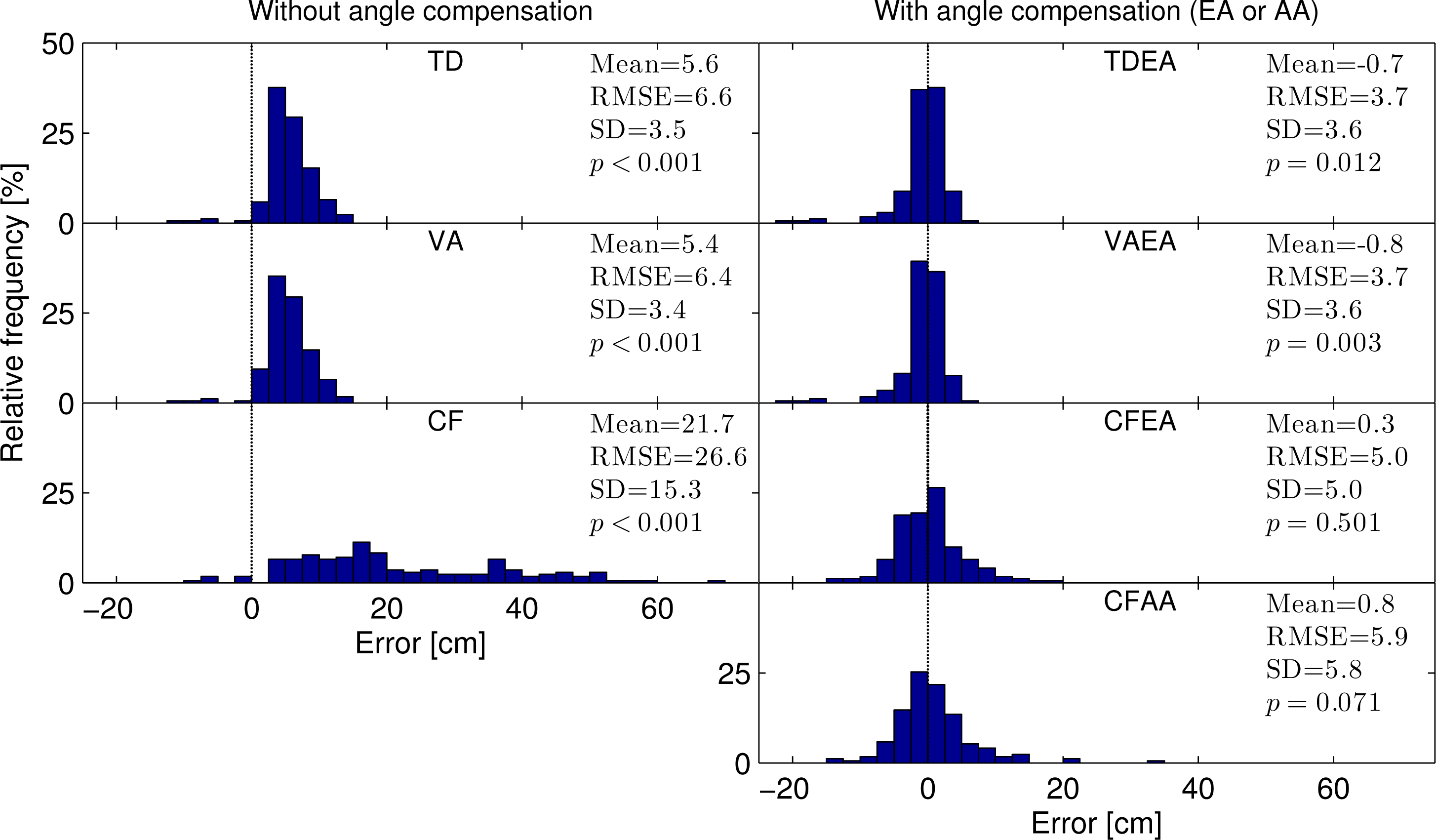
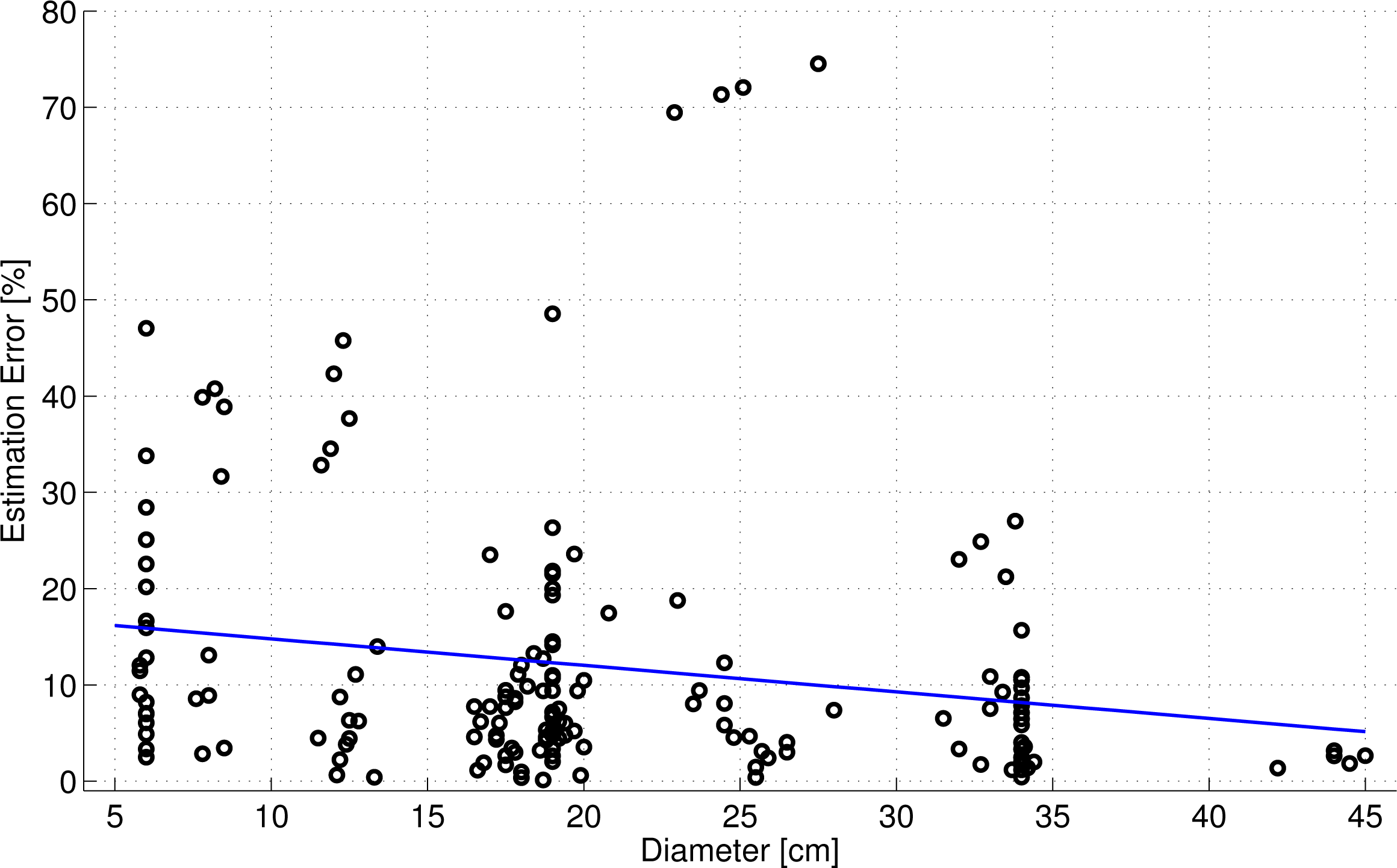
4.2. Evaluation of Diameter Estimation Algorithms
5. Discussions
6. Conclusions
Acknowledgments
Conflict of Interest
References
- Holopainen, M.; Vastaranta, M.; Rasinmäki, J.; Kalliovirta, J.; Mäkinen, A.; Haapanen, R.; Melkas, T.; Yu, X.; Hyyppä, J. Uncertainty in timber assortment estimates predicted from forest inventory data. Eur. J. For. Res 2010, 129, 1131–1142. [Google Scholar]
- Zianis, D.; Muukkonen, P.; Makipaa, R.; Mencuccini, M. Biomass and stem volume equations for tree species in Europe. Silva Fenn. Monogr 2005, 4, 1–63. [Google Scholar]
- Shiriaev, A.; Freidovich, L.; Manchester, I.; Mettin, U.; La Hera, P.; Westerberg, S. Status of Smart Crane Lab Project: Modeling and Control for a Forwarder Crane; Technical Report; Department of Applied Physics and Electronics, Umeå University: Umeå, Sweden, 2008. [Google Scholar]
- Hellström, T.; Ringdahl, O. Follow the past—A path tracking algorithm for autonomous vehicles. Int. J. Veh. Auton. Syst 2006, 4, 216–224. [Google Scholar]
- Hellström, T.; Lärkeryd, P.; Nordfjell, T.; Ringdahl, O.; Nordfjell, T. Autonomous forest vehicles: Historic, envisioned, and state-of-the-art. Int. J. For. Eng 2009, 20, 31–38. [Google Scholar]
- Ringdahl, O. Automation in Forestry—Development of Unmanned Forwarders, 2011.
- Hellström, T.; Ringdahl, O. Real-time path planning using a simulator-in-the-loop. Int. J. Veh. Auton. Syst 2009, 7, 56–72. [Google Scholar]
- Öhman, M.; Miettinen, M.; Kannas, K.; Jutila, J.; Visala, A.; Forsman, P. Tree Measurement and Simultaneous Localization and Mapping System for Forest Harvesters. In Field and Service Robotics SE - 35; Laugier, C., Siegwart, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 42, Springer Tracts in Advanced Robotics; pp. 369–378. [Google Scholar]
- Wang, Z.; Huang, S.; Dissanayake, G. D-SLAM: Decoupled localization and mapping for autonomous robots. Proceedings of the International Symposium of Robotics Research, ISRR 05, San Francisco, CA, USA, 12–15 October 2005; 26, pp. 203–213.
- Miettinen, M.; Ohman, M.; Visala, A.; Forsman, P. Simultaneous Localization and Mapping for Forest Harvesters. Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 517–522.
- Huang, S.; Wang, Z.; Dissanayake, G. Sparse local submap joining filter for building large-scale maps. IEEE Trans. Robot 2008, 24, 1121–1130. [Google Scholar]
- Mettin, U.; Westerberg, S.; Shiriaev, A.S.; La Hera, P.X. Analysis of human-operated motions and trajectory replanning for kinematically redundant manipulators. Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; pp. 795–800.
- Dissanayake, M.W.M.G.; Newman, P.; Clark, S.; Durrant-Whyte, H.; Csorba, M. A solution to the simultaneous localization and map building (SLAM) problem. IEEE Trans. Robot. Autom 2001, 17, 229–241. [Google Scholar]
- Jutila, J.; Kannas, K.; Visala, A. Tree Measurement in Forest by 2D Laser Scanning. Proceedings of the 2007 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–23 June 2007; pp. 491–496.
- Zheng, Y.; Liu, J.; Wang, D.; Yang, R. Laser scanning measurements on trees for logging harvesting operations. Sensors 2012, 12, 9273–9285. [Google Scholar]
- Hyyppa, J.; Hyyppa, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens 2008, 29, 1339–1366. [Google Scholar]
- Rossmann, J.; Schluse, M.; Schlette, C.; Buecken, A.; Krahwinkler, P.; Emde, M. Realization of a Highly Accurate Mobile Robot System for Multi Purpose Precision Forestry Applications. Proceedings of the 2009 International Conference on Advanced Robotics, ICAR 2009, Munich, Germany, 22–26 June 2009; pp. 1–6.
- Rossmann, J.; Krahwinkler, P.; Schlette, C. Navigation of mobile robots in natural environments: Using sensor fusion in forestry. J. Syst. Cybern. Inform 2010, 8, 67–71. [Google Scholar]
- Andersen, H.E.; Clarkin, T.; Winterberger, K.; Strunk, J. An accuracy assessment of positions obtained using survey- and recreational-grade global positioning system receivers across a range of forest conditions within the Tanana Valley of interior Alaska. West. J. Appl. For 2009, 24, 9. [Google Scholar]
- Rodríguez-Pérez, J.R.; Álvarez, M.; Sanz-Ablanedo, E. Assessment of low-cost GPS receiver accuracy and precision in forest environments. J. Surv. Eng 2007, 133, 159–167. [Google Scholar]
- Naesset, E.; Jonmeister, T. Assessing point accuracy of DGPS under forest canopy before data acquisition, in the field and after postprocessing. Scand. J. For. Res 2002, 17, 351–358. [Google Scholar]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.k.; Persson, A.s.; Söderman, U. Laser scanning of forest resources: The nordic experience. Scand. J. For. Res 2004, 19, 482–499. [Google Scholar]
- Holmgren, J.; Barth, A.; Larsson, H.; Olsson, H.k. Prediction of stem attributes by combining airborne laser scanning and measurements from harvesters. Silva Fenn 2012, 46, 227–239. [Google Scholar]
- Haala, N.; Reulke, R.; Thies, M.; Aschoff, T. Combination of Terrestrial Laser Scanning with High Resolution Panoramic Images for Investigations in Forest Applications and Tree Species Recognition. In Proceedings of the ISPRS Working Group V1 Panoramic Photogrammetery Workshop; Maas, H.G., Schneider, D., Eds.; Dresden, Germany, 2004; Volume 1, pp. 1–4. [Google Scholar]
- Aschoff, T.; Spiecker, H. Algorithms for the automatic detection of trees in laser scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2004, 36, 71–75. [Google Scholar]
- Aschoff, T.; Thies, M.; Spiecker, H. Describing forest stands using terrestrial laser-scanning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2004, 35, 237–241. [Google Scholar]
- Lindberg, E.; Holmgren, J.; Olofsson, K.; Olsson, H. Estimation of stem attributes using a combination of terrestrial and airborne laser scanning. Eur. J. For. Res 2012, 131, 1917–1931. [Google Scholar]
- Pfeifer, N.; Winterhalder, D. Modelling of tree cross sections from terrestrial laser scanning data with free-form curves. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci 2004, 36, W2. [Google Scholar]
- Thies, M.; Pfeifer, N.; Winterhalder, D.; Gorte, B.G.H. Three-dimensional reconstruction of stems for assessment of taper, sweep and lean based on laser scanning of standing trees. Scand. J. For. Res 2004, 19, 571–581. [Google Scholar]
- Forsman, P.; Halme, A. 3-D mapping of natural environments with trees by means of mobile perception. IEEE Trans. Robot 2005, 21, 482–490. [Google Scholar]
- Henning, J.G.; Radtke, P.J. Detailed stem measurements of standing trees from ground-based scanning lidar. For. Sci 2006, 52, 67–80. [Google Scholar]
- Moskal, L.M.; Zheng, G. Retrieving forest inventory variables with Terrestrial Laser Scanning (TLS) in urban heterogeneous forest. Remote Sens 2011, 4, 1–20. [Google Scholar]
- Gorte, B.; Pfeifer, N. Structuring laser-scanned trees using 3D mathematical morphology. Int. Arch. Photogramm. Remote Sens 2004, 35, 929–933. [Google Scholar]
- Hosoi, F.; Omasa, K. Voxel-based 3-D modeling of individual trees for estimating leaf area density using high-resolution portable scanning lidar. IEEE Trans. Geosci. Remote Sens 2006, 44, 3610–3618. [Google Scholar]
- Liang, X.; Litkey, P.; Hyyppä, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic Stem Location Mapping Using TLS for Plot-Wise Forest Inventory. Proceedings of the SilviLaser 2009, College Station, Texas, USA, 14–16 October 2009.
- Bailey, T.; Nebot, E. Localisation in large-scale environments. Robot. Auton. Syst 2001, 37, 261–281. [Google Scholar]
- Selkäinaho, J. Adaptive Autonomous Navigation of Mobile Robots in Unknown Environments, 2002.
- Coope, I.D. Circle fitting by linear and nonlinear least squares. J. Optim. Theory Appl 1993, 76, 381–388. [Google Scholar]
- Mathworks. Circle fit; File Exchange, MATLAB Central. Available online: http://www.mathworks.com/matlabcentral/fileexchange/5557-circle-fit (accessed on 30 September 2013).
- Hellström, T.; Hohnloser, P.; Ringdahl, O. Tree Diameter Estimation Using Laser Scanner; Technical Report, UMINF 12.20; Department of Computing Science, Umeå University: Umeå, Sweden, 2012. [Google Scholar]
- Pulkkinen, M. On non-circularity of tree stem cross-sections: Effect of diameter selection on cross-section area estimation, Bitterlich sampling and stem volume estimation in Scots pine. Silva Fenn 2012, 46, 747–986. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Diameter Range (cm) |
|---|---|
| Goat willow (Salix caprea) | 42.2–49.6 |
| European aspen (Populus tremula) | 7.6–8.5 |
| European aspen (Populus tremula) | 17.2–19.2 |
| Scots pine (Pinus sylvestris) | 5.6–6.0 |
| Scots pine (Pinus sylvestris) | 11.5–13.4 |
| Scots pine (Pinus sylvestris) | 17.6–20.8 |
| Silver birch (Betula pubescens) | 16.5–18.3 |
| Silver birch (Betula pubescens) | 22.9–28.0 |
| Silver birch (Betula pubescens) | 31.5–34.4 |
| DEA: | Diameter estimation algorithms |
| VA: | Diameter estimation based on viewing angle |
| TD: | Two triangle diameter estimation |
| CF: | Circle fit |
| BWC: | Beam width compensation |
| EA: | Edge points adjusted |
| AA: | All points adjusted |
| MS: | Multiple scans |
| MR: | Mean ranges |
| MD: | Mean diameter |
| DEA | BWC | n | Absolute Error (cm) | Absolute Percentage Error (%) | ||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | |||
| CF | No | 168 | 22.1a,A | 14.8 | 155.6a,A | 188.9 |
| EA | 170 | 3.7b,B | 3.4 | 19.2b,B | 16.9 | |
| AA | 170 | 4.0B | 4.3 | 21.3B | 22.5 | |
| VA | No | 170 | 5.8c | 2.7 | 38.9c | 35.8 |
| EA | 170 | 2.2d | 3.0 | 11.7d | 13.9 | |
| TD | No | 170 | 6.0c | 2.7 | 40.0c | 35.8 |
| EA | 170 | 2.2d | 3.0 | 11.8d | 14.0 | |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ringdahl, O.; Hohnloser, P.; Hellström, T.; Holmgren, J.; Lindroos, O. Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner. Remote Sens. 2013, 5, 4839-4856. https://doi.org/10.3390/rs5104839
Ringdahl O, Hohnloser P, Hellström T, Holmgren J, Lindroos O. Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner. Remote Sensing. 2013; 5(10):4839-4856. https://doi.org/10.3390/rs5104839
Chicago/Turabian StyleRingdahl, Ola, Peter Hohnloser, Thomas Hellström, Johan Holmgren, and Ola Lindroos. 2013. "Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner" Remote Sensing 5, no. 10: 4839-4856. https://doi.org/10.3390/rs5104839
APA StyleRingdahl, O., Hohnloser, P., Hellström, T., Holmgren, J., & Lindroos, O. (2013). Enhanced Algorithms for Estimating Tree Trunk Diameter Using 2D Laser Scanner. Remote Sensing, 5(10), 4839-4856. https://doi.org/10.3390/rs5104839