Calving Fronts of Antarctica: Mapping and Classification

Abstract
:1. Introduction
2. Data and Methods
2.1. Data Sets
2.2. Automated Detection of Surface Structures
3. Results and Discussion
3.1. Surface Structure Distribution
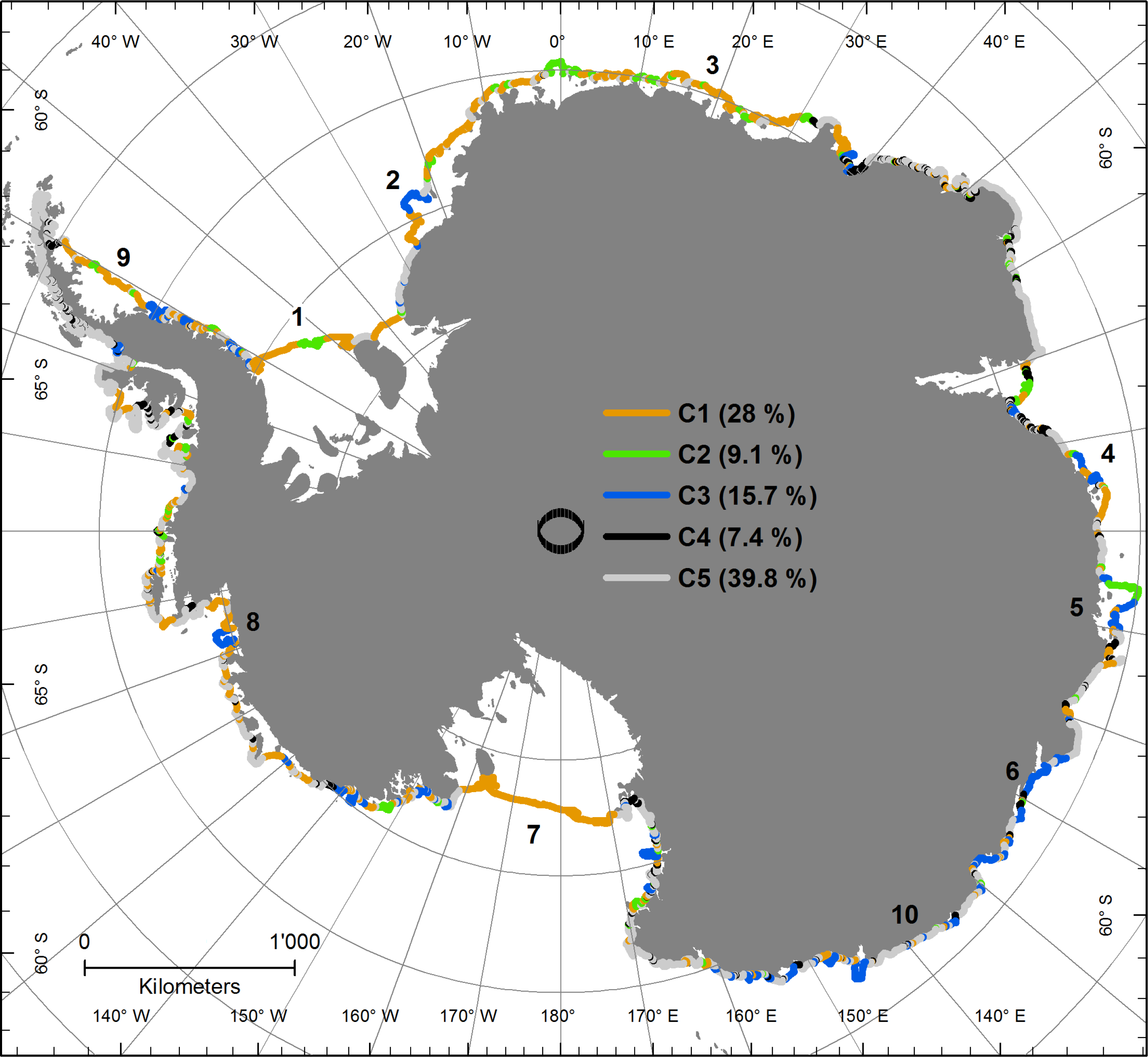
3.2. Classification of Surface Features
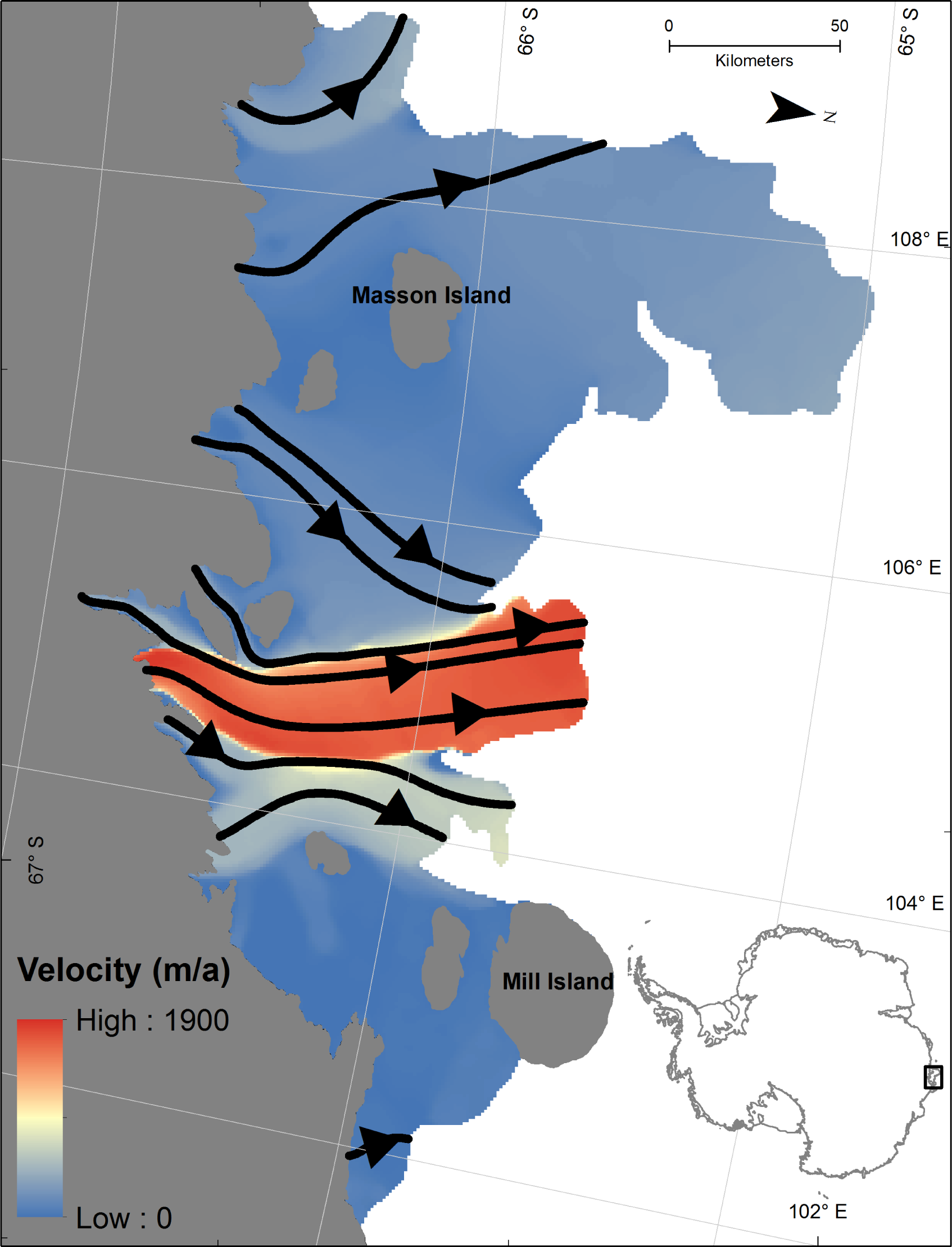
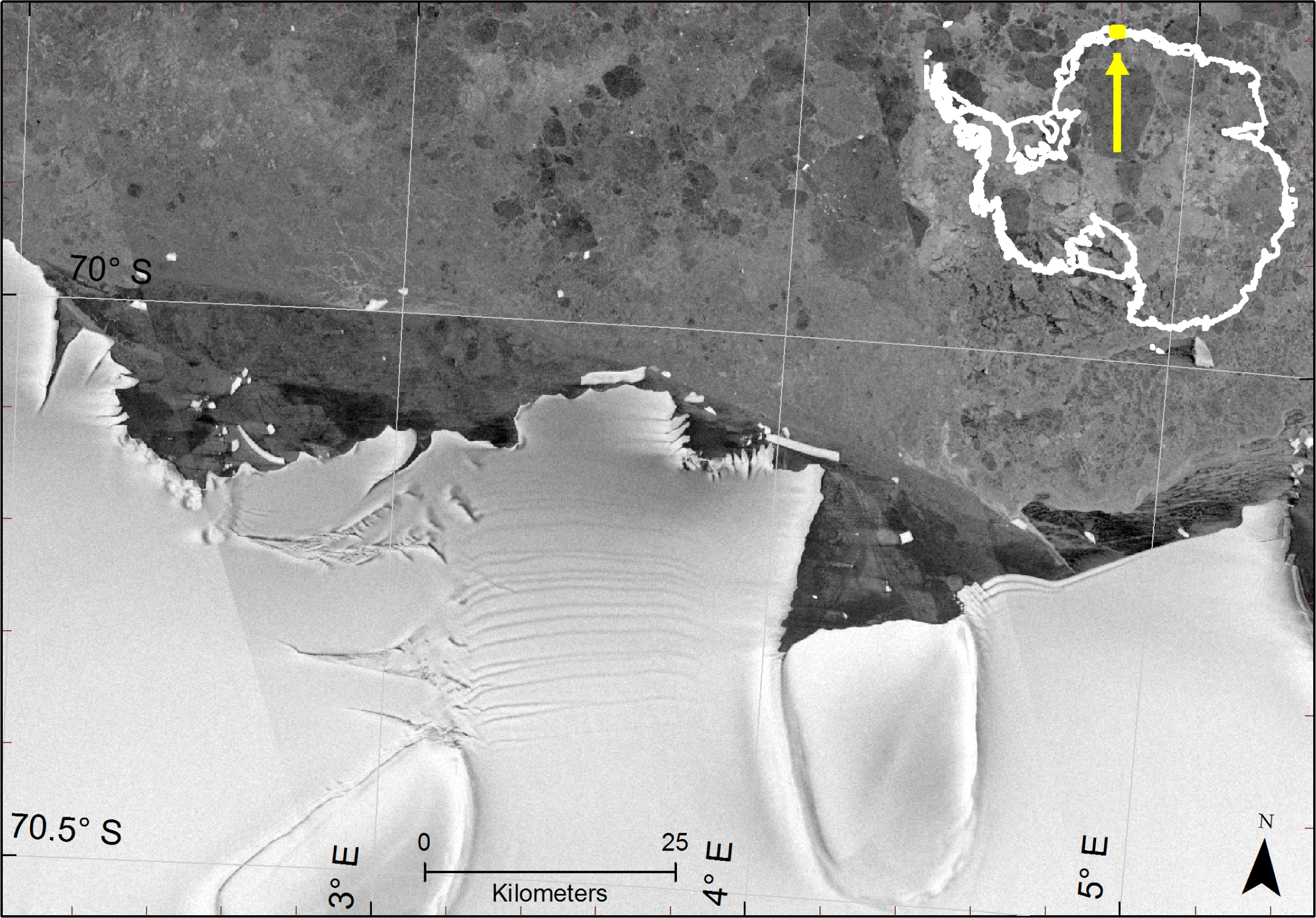
- Surface structures parallel to the calving front (C1): Surface structures parallel to the calving front are typically formed by rifts, crevasses, pressure ridges or depressions. The latter indicate the existence of basal crevasses [15–17]. Surface depressions are visible in SAR and optical images as sometimes quasi-periodic patterns. Ice shelf rifts propagate through the entire thickness of the ice shelf and can be several hundred kilometers in length and several kilometers in width. They may arise from basal or surface crevasses [13,28] and often originate due to obstacles to the ice flow as ice rises or ice rumples. An example of parallel surface structures is presented in Figure 3.
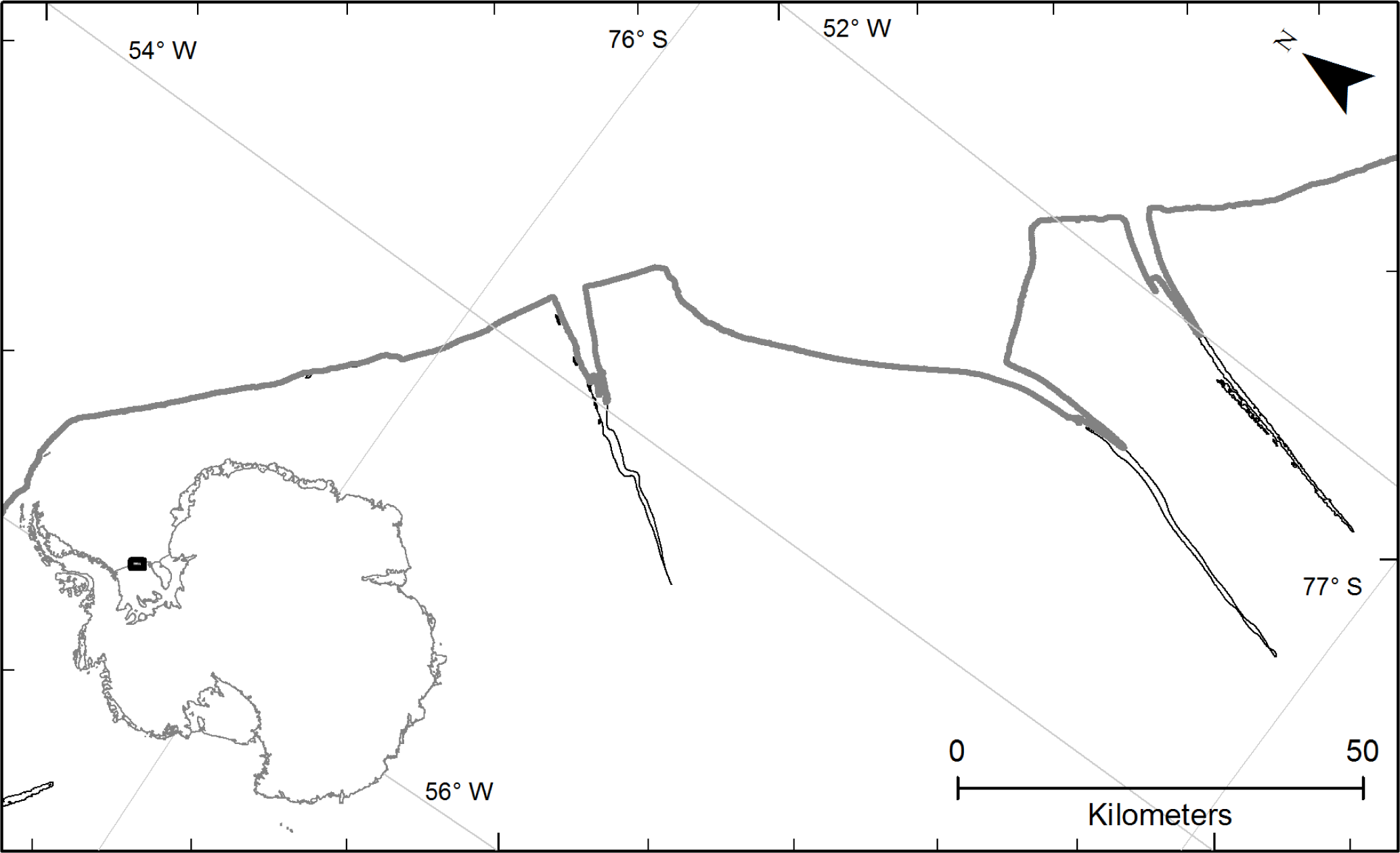
- Surface structures orthogonal to the calving front (C2): These structures are rifts cut back into the ice shelf from the calving front into the ice shelf (Figure 4; [13,33]). They open due to the gravitational side-ward spreading (radially diverging ice flow) of the ice shelf, when its sides are no longer buttressed by land [34]. Wind speed, tidal amplitude and ocean swell drive the propagation of rifts from the ice edge into the interior of the ice shelves [35]. An example is the “loose-tooth” rift system at the Amery Ice Shelf front [35] or the rifts in the central part of the ice front at Filcher-Ronne Ice Shelf (Figure 4).
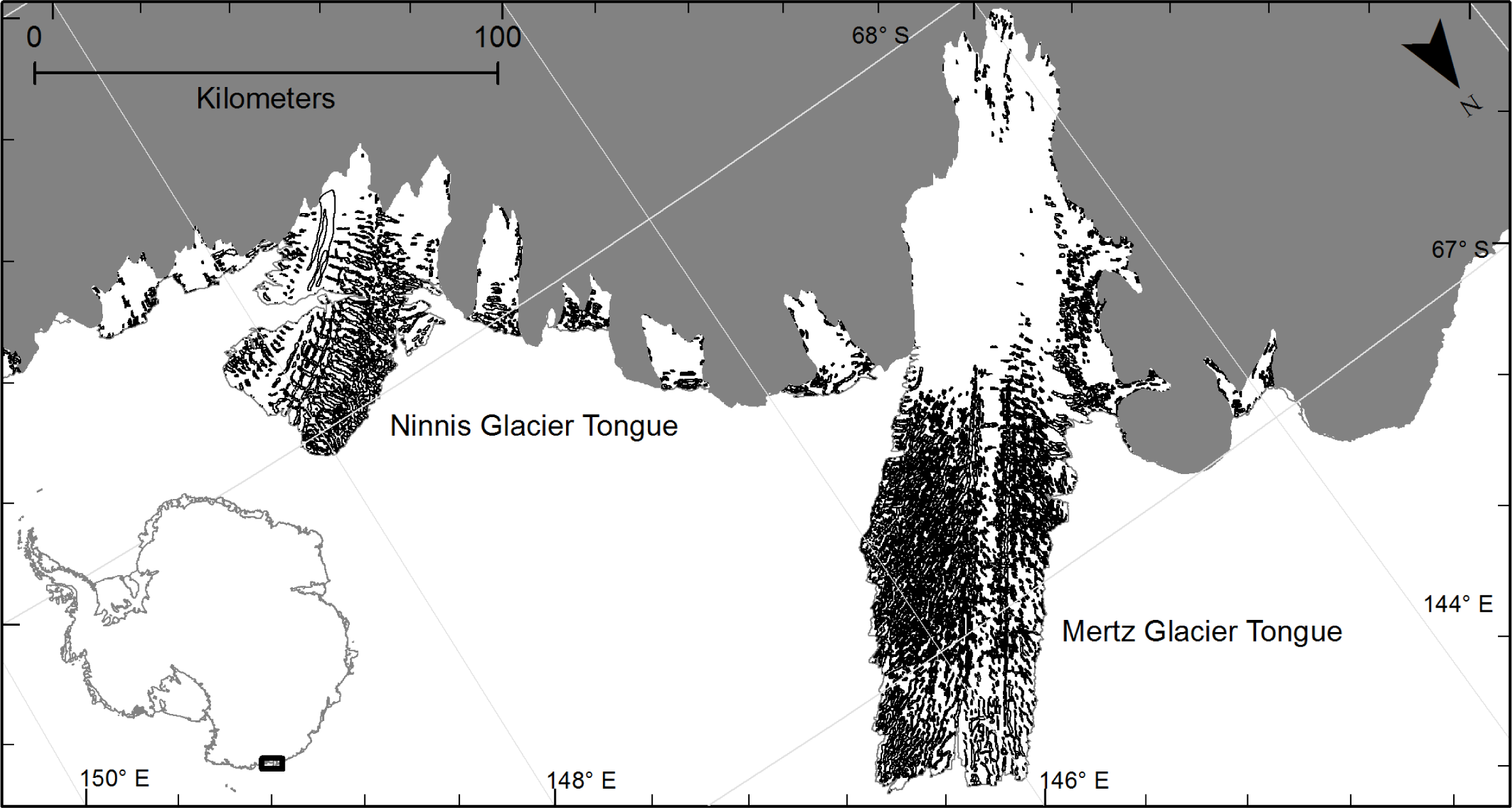
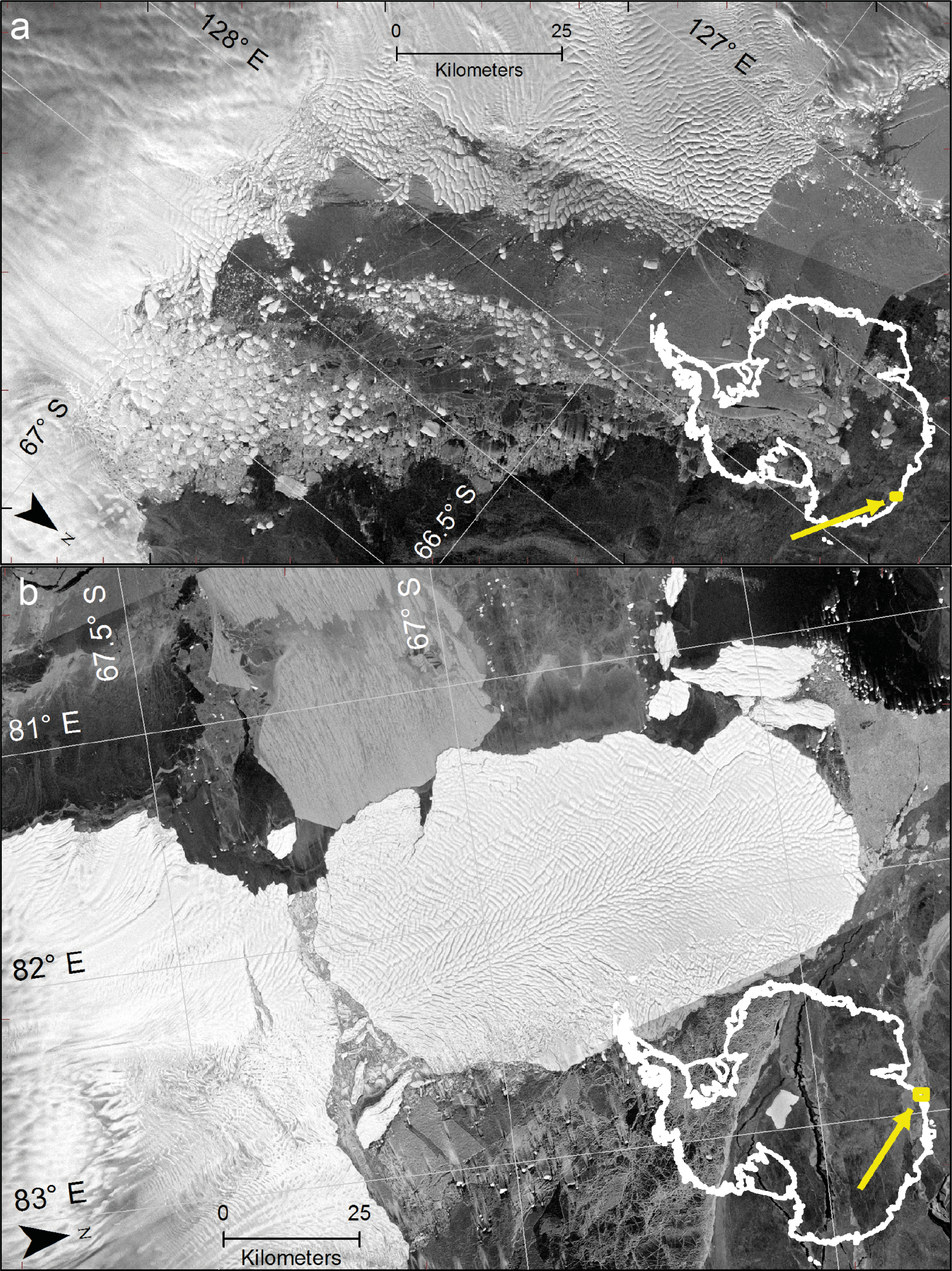
- IS pattern (C3): The IS pattern can be found on fast flowing glacier tongues like those of the Mertz or Ninnis Glaciers (Figure 5), or very small ice shelves, where the TOR is not sufficient for a crevasse healing process (see above). Thus, longitudinal and transversal crevasses originating close to the grounding line [13] are still visible at the ice edge.
3.3. Shapes and Sizes of Potential Icebergs
4. Conclusions
Acknowledgments
Conflicts of Interest
References
- Paterson, W. The Physics of Glaciers, 3 ed.; Butterworth Heinemann: Oxford, UK, 1994; p. 480. [Google Scholar]
- Jacobs, S.S.; Hellmer, H.H.; Doake, C.S.M.; Jenkins, A.; Frolich, R.M. Melting of ice shelves and the mass balance of Antarctica. J. Glaciol 1992, 38, 375–387. [Google Scholar]
- Benn, D.I.; Warren, C.R.; Mottram, R.H. Calving processes and the dynamics of calving glaciers. Earth Sci. Rev 2007, 82, 143–179. [Google Scholar]
- Rignot, E.; Jacobs, S.S.; Mouginot, J.; Scheuchl, B. Ice-shelf melting around Antarctica. Science 2013, 341, 266–270. [Google Scholar]
- Depoorter, M.A.; Bamber, J.L.; Griggs, J.A.; Lenaerts, J.T.M.; M., L.S.R.; van den Broecke, M.R.; Moholdt, G. Calving fluxes and basal melt rates of Antarctic ice shelves. Nature 2013, 502, 89–92. [Google Scholar]
- Oerter, H.; Kipfstuhl, J.; Determann, J.; Miller, H.; Wagenbach, D.; Minikin, A.; Graf, W. Evidence for basal marine ice in the Filchner-Ronne Ice Shelf. Nature 1992, 358, 399–401. [Google Scholar]
- Craven, M.; Allison, I.; Fricker, H.A.; Warner, R. Properties of a marine ice layer under the Amery Ice Shelf, East Antarctica. J. Glaciol 2009, 55, 717–728. [Google Scholar]
- Pattyn, F.; Matsuoka, K.; Callens, D.; Conway, H.; Depoorter, M.; Docquier, D.; Hubbard, B.; Samyn, D.; Tison, J.L. Melting and refreezing beneath Roi Baudouin Ice Shelf (East Antarctica) inferred from radar, GPS, and ice core data. J. Geophys. Res 2012, 117, 1–8. [Google Scholar]
- Jansen, D.; Luckman, A.; Kulessa, B.; Holland, P.R.; King, E.C. Marine ice formation in a suture zone on the Larsen C Ice Shelf and its influence on ice shelf dynamics. J. Geophys. Res 2013, 118, 1–13. [Google Scholar]
- Silva, T.A.M.; Bigg, G.R.; Nicholls, K.W. Contribution of giant icebergs to the Southern Ocean freshwater flux. J. Geophys. Res 2006, 111, 1–8. [Google Scholar]
- Jansen, D.; Schodlok, M.; Rack, W. Basal melting of A-38B: A physical model constrained by satellite observations. Remote Sens. Environ 2007, 111, 195–203. [Google Scholar]
- Holt, T.O.; Glasser, N.F.; Quincey, D.J.; Siegfried, M.R. Speedup and fracturing of George VI Ice Shelf, Antarctic Peninsula. The Cryosphere 2013, 7, 797–816. [Google Scholar] [Green Version]
- Glasser, N.F.; Scambos, T. A structural glaciological analysis of the 2002 Larsen B ice-shelf collapse. J. Glaciol 2008, 54, 3–16. [Google Scholar] [Green Version]
- Sergienko, O. Basal melt channels on ice shelves. J. Geophys. Res 2013, 118, 1–14. [Google Scholar]
- Luckman, A.; Jansen, D.; Kulessa, B.; King, E.; Sammonds, P.; Benn, D. Basal crevasses in Larsen C Ice Shelf and implications for their global abundance. The Cryosphere 2012, 6, 113–123. [Google Scholar] [Green Version]
- McGrath, D.; Steffen, K.; Scambos, T.; Rajaram, H.; Casassa, G.; Lagos, J.R. Basal crevasses and associated surface crevassing on Larsen C Ice Shelf, Antarctica, and their role in ice-shelf instalbility. Ann. Glaciol 2012, 58, 10–14. [Google Scholar]
- Humbert, A.; Steinhage, D. The evolution of the western rift area of the Fimbul Ice Shelf, Antarctica. The Cryosphere 2011, 5, 931–944. [Google Scholar] [Green Version]
- Dowdeswell, J.A. On the nature of Svalbard icebergs. J. Glaciol 1989, 35, 224–234. [Google Scholar]
- Jezek, K.; Sohn, H.; Noltimier, K. The Radarsat Antarctic Mapping Project. Proceedings of 1998 IEEE International Geoscience and Remote Sensing Symposium Proceedings, IGARSS ’98, Seattle, WA, USA, 6–10 July 1998; 5, pp. 2462–2464.
- Oliver, C.; Quegan, S. Understanding Synthetic Aperture Radar Images; Artech House: Boston, MA, USA, 1998; p. 479. [Google Scholar]
- Septhon, A.; Brown, L.; Macklin, J.T.; Partington, K.C.; Veck, N.; Rees, W. Segmentation of Synthetic-Aperture Radar imagery of sea ice. Int. J. Remote Sens 1994, 15, 803–825. [Google Scholar]
- Young, N.W.; Turner, D.; Hyland, G.; Williams, R.N. Near-coastal iceberg distribution in East Antartica, 50–145°E. Ann. Glaciol 1998, 27, 68–74. [Google Scholar]
- Haran, T.; Bohlander, J.; Scambos, T.; Painter, T.; Fahnestock, M. MODIS Mosaic of Antarctica (MOA) Image Map; National Snow and Ice Data Center: Boulder, CO, USA, 2005. [Google Scholar]
- Rees, W.G. Remote Sensing of Snow and Ice; Taylor & Francis: Boca Raton, FL, USA, 2006. [Google Scholar]
- Wesche, C.; Dierking, W. Iceberg signatures and detection in SAR images in two test regions of the Weddell Sea, Antarctica. J. Glaciol 2012, 58, 325–339. [Google Scholar] [Green Version]
- Lopes, A.; Touzi, R.; Nezry, E. Adaptive speckle filters and scene heterogeneity. IEEE Trans. Geosci. Remote Sens 1990, 28, 992–1000. [Google Scholar]
- Willis, C.J.; Macklin, J.T.; Partington, K.C.; Teleki, K.A.; Rees, W.G.; Williams, R.G. Iceberg detection using ERS-1 Synthetic Aperture Radar. Int. J. Remote Sens 1996, 17, 1777–1795. [Google Scholar]
- Lazzara, M.A.; Jezek, K.C.; Scambos, T.A.; MacAyeal, D.R.; van der Veen, C.J. On the recent calving of icebergs from the Ross ice shelf. Polar Geogr 2008, 31, 15–26. [Google Scholar]
- Derradji-Aouat, A.; Evgin, E. A constitutive model for isotropic freshwater ice. Can. Geotech. J 2001, 38, 818–827. [Google Scholar]
- Mouginot, J.; Scheuchl, B.; Rignot, E. Mapping of ice motion in Antarctica using Synthetic Aperture Radar data. Remote Sens 2012, 4, 2753–2767. [Google Scholar]
- Rignot, E.; Mouginot, J.; Scheuchl, B. MEaSUREs InSAR-Based Antarctica Ice Velocity Map; National Snow and Ice Data Center: Boulder, CO, USA, 2011. [Google Scholar]
- Lenaerts, J.T.M.; van den Broecke, M.R.; van de Berg, W.J.; van Meijgaard, E.; Munneke, P.K. A new, high-resolution surface mass balance map of Antarctica (1979–2010) based on regional atmospheric climate modeling. Geophys. Res. Lett 2012, 39, 1–5. [Google Scholar]
- Glasser, N.F.; Gudmundsson, G. Longitudinal surface structures (flowstripes) on Antarctic glacier. The Cryosphere 2012, 6, 383–391. [Google Scholar]
- Hughes, T. On the disintegration of ice shelves: The role of fracture. J. Glaciol 1983, 29, 98–117. [Google Scholar]
- Bassis, J.; Fricker, H.A.; Coleman, R.; Minster, J.B. An investigation into the forces that drives ice-shelf rift propagation on the Amery Ice Shelf, East Antarctica. J. Glaciol 2008, 54, 17–27. [Google Scholar]
- Fricker, H.A.; Young, N.W.; Allison, I.; Coleman, R. Iceberg calving from the Amery Ice Shelf, East Antarctica. Ann. Glaciol 2002, 34, 241–246. [Google Scholar]
- Stephen, H.; Long, D. Study of Iceberg B10A Using Scatterometer Data. Proceedings of IEEE 2000 International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 24–28 July 2000; pp. 1340–1342.
- Gladstone, R.M.; Bigg, G.R.; Nicholls, K.W. Iceberg trajectory modeling and meltwater injection in the Southern Ocean. J. Geophys. Res 2001, 106, 19903–19915. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class Combination | Amount |
|---|---|
| single class | 138 |
| C1 + C2 | 34 |
| C1 + C3 | 12 |
| C1 + C4 | 15 |
| C2 + C3 | 5 |
| C2 + C4 | 2 |
| C3 + C4 | 6 |
| C1 + C2 + C3 | 5 |
| Sector | Amount on Total Coastline Length [%] | Class | Amount [%] |
|---|---|---|---|
| A | 32.5 | C1 | 28.5 |
| C2 | 9.8 | ||
| C3 | 9.8 | ||
| C4 | 3.8 | ||
| C5 | 48.1 | ||
| B | 16.5 | C1 | 46.2 |
| C2 | 4.7 | ||
| C3 | 17.2 | ||
| C4 | 2.5 | ||
| C5 | 29.4 | ||
| C | 27.7 | C1 | 21.8 |
| C2 | 6.6 | ||
| C3 | 26.7 | ||
| C4 | 6.9 | ||
| C5 | 38.0 | ||
| D | 23.3 | C1 | 32.5 |
| C2 | 14.8 | ||
| C3 | 7.2 | ||
| C4 | 15.2 | ||
| C5 | 30.3 | ||
| Sector | Width [km] | Number |
|---|---|---|
| A | < 10 | 3 |
| 10–50 | 26 | |
| 50–100 | 10 | |
| 100–200 | 6 | |
| > 200 | 3 | |
| B | < 10 | 12 |
| 10–50 | 26 | |
| 50–100 | 7 | |
| 100–200 | 1 | |
| > 200 | 2 | |
| C | < 10 | 23 |
| 10–50 | 35 | |
| 50–100 | 8 | |
| 100–200 | 1 | |
| > 200 | 3 | |
| D | < 10 | 13 |
| 10–50 | 30 | |
| 50–100 | 2 | |
| 100–200 | 7 | |
| > 200 | 2 | |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wesche, C.; Jansen, D.; Dierking, W. Calving Fronts of Antarctica: Mapping and Classification. Remote Sens. 2013, 5, 6305-6322. https://doi.org/10.3390/rs5126305
Wesche C, Jansen D, Dierking W. Calving Fronts of Antarctica: Mapping and Classification. Remote Sensing. 2013; 5(12):6305-6322. https://doi.org/10.3390/rs5126305
Chicago/Turabian StyleWesche, Christine, Daniela Jansen, and Wolfgang Dierking. 2013. "Calving Fronts of Antarctica: Mapping and Classification" Remote Sensing 5, no. 12: 6305-6322. https://doi.org/10.3390/rs5126305
APA StyleWesche, C., Jansen, D., & Dierking, W. (2013). Calving Fronts of Antarctica: Mapping and Classification. Remote Sensing, 5(12), 6305-6322. https://doi.org/10.3390/rs5126305