1. Introduction
Sea Surface Temperature (SST; see
Table 1 for a list of abbreviations used in this paper) is a fundamental variable at the ocean-atmosphere interface [
1]. It affects the complex interactions between atmosphere and ocean at a variety of scales. Thus, SST datasets with high quality are needed for many applications, such as operational monitoring, numerical weather, and ocean forecasting, climate change research, and so on. SST is collected routinely from
in situ measurements, such as ships, moored and drifting buoys. They are usually taken as ground truth while limited in time and space coverage. Nowadays, continuous SST retrieved from satellites is increasingly used. However, the infrared satellite measurements are often contaminated by clouds and the microwave satellite observations are unavailable in rainfall, near sea ice or land,
etc. Additionally, they are measured from different sensors and platform types, it is necessary to assess their biases and errors carefully before further use [
2].
Table 1.
List of abbreviations.
Table 1.
List of abbreviations.
| Abbreviations | Full Name |
|---|
| AVHRR | Advanced Very High Resolution Radiometer |
| EUMETSAT | European Organisation for the Exploitation of Meteorological Satellites |
| GHRSST | Group for High Resolution SST |
| GTS | Global Telecommunication System |
| HDF | Hierarchical Data Format |
| HR-Drifter | high resolution SST drifters |
| iQuam | in situ Quality Monitor |
| JPL | Jet Propulsion Laboratory |
| MODIS | Moderate Resolution Imaging Spectro-radiometer |
| NASA | National Aeronautics and Space Administration |
| NAVO | Naval Oceanographic Office |
| netCDF | network Common Data Form |
| NOAA | National Oceanic and Atmospheric Administration |
| OBPG | Ocean Biology Processing |
| OISST | Optimum-Interpolation Sea Surface Temperature |
| OSI-SAF | EUMETSAT Ocean and Sea Ice Satellite Application Facility |
| OSTIA | Operational SST and Sea Ice Analysis |
| RSMAS | Rosenstiel School of Marine and Atmospheric Science |
| SST | Sea Surface Temperature |
| S-NPP | Suomi National Polar-orbiting Partnership |
| VIIRS | Visible Infrared Imaging Radiometer Suite |
To provide gap-free SST for various applications, many interpolated datasets, such as Optimum-Interpolation Sea Surface Temperature (OISST), the Operational SST and Sea Ice Analysis (OSTIA), and so on, are made by various research groups [
3,
4] incorporating as more available data from satellites and
in situ measurements as possible. However, these products do not include SST from the new sensor of the Visible Infrared Imaging Radiometer Suite (VIIRS). It is a primary sensor onboard the Suomi National Polar-orbiting Partnership (S-NPP) satellite which launched on 28 October 2011 and achieved provisional maturity status by early 2013 [
5]. VIIRS started a new era of moderate-resolution imaging capabilities as a successive sensor of Advanced Very High Resolution Radiometer (AVHRR) and Moderate Resolution Imaging Spectro-radiometer (MODIS). High-quality global SST is critically needed at the present stage. First, there is an increasing concern with the aging of the MODIS because they have far exceeded their original retirement ages. Second, the comparatively long records of AVHRR SST have been already accumulated (over 30 years), while the latest and final AVHRR onboard National Oceanic and Atmospheric Administration (NOAA)-19 for the afternoon orbit was launched on 6 February 2009.
Many works on sensor measurements calibration and satellite derived products validation have been done in order to verify the performance of S-NPP VIIRS [
5,
6,
7,
8,
9,
10]. They showed that the VIIRS has been working very well since launched after a number of issues were resolved. The radiometric uncertainty for the reflective solar bands is generally believed to be comparable to that of MODIS within 2% in reflectance, while an agreement on the order of 0.1 K with AVHRR and other existing references for the sea surface temperature bands has been reached. In this paper, we focus on the performances of SST derived from S-NPP VIIRS. The existing operational SST algorithms developed by several government organizations and institutes, such as NOAA, Naval Oceanographic Office (NAVO), the Rosenstiel School of Marine and Atmospheric Science (RSMAS), and Ocean and Sea Ice Satellite Application Facility (OSI-SAF) from the European Organization for the Exploitation of Meteorological Satellites(EUMETSAT), have been evaluated for VIIRS SST retrieval [
11]. To keep consistency for assimilation into analyses and models, the SST is retrieved from NAVO, which provides operational processing of SST retrievals for AVHRR since 1993. Initial comparison between buoys and VIIRS SST processing at NAVO show a high root mean square error and a warm bias for both daytime and nighttime [
12]. With the improvements of the sensor calibrating and cloud screening, as well as the increasing number of matchups allowing better algorithm coefficients to be regressed, the NAVO S-NPP VIIRS SST became operational at the end of January 2013 [
13].
In this paper, we particularly focus on the comparison between global
in situ and NAVO S-NPP VIIRS SST. Previous works have shown the difficulty in comparing different sources of SST with their specific characteristics in global and regional scale [
2,
14,
15]. To assess the accuracy of satellite SST, it is important to utilize as many
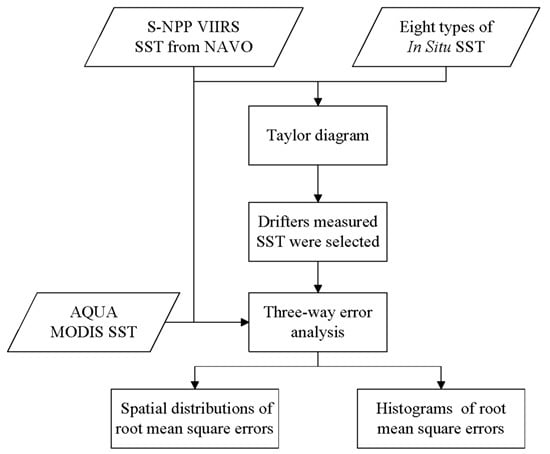
in situ measurements as possible for validation, especially for regions of sparse data. The Taylor diagram is first used to demonstrate the differences of the RMSE, correlation and standard deviation between the NAVO S-NPP VIIRS SST and eight types of
in situ measurements, and then select drifter SST as reference to validate the VIIRS SST. Then, a three-way error analysis in conjunction with the drifter and AQUA MODIS SSTs are employed to evaluate the performance of VIIRS SST. The results can be beneficial for other applications, such as the data interpretation, improvement of sensor design, SST retrieval algorithm and merging the VIIRS SST with other available data sources,
etc.This work is organized as follows: the NAVO S-NPP VIIRS, AQUA MODIS and
in situ SST used in this work are described in
Section 2. A strategy for matching the VIIRS SST and
in situ SST and the distribution of the matchups is outlined in
Section 3. Then an initial comparison between the VIIRS SST and various types of
in situ SST is performed in
Section 4. The root mean square error of VIIRS SST is estimated via three-way analyses in
Section 5. Conclusions are presented in
Section 6.
4. Initial Comparison between the NAVO S-NPP VIIRS SST and in Situ SST
Since various types of
in situ SST originate from different countries and agencies for different purpose, it is necessary to identify significant deviations in their suitability for satellite validation first. The Taylor diagram [
27] is used to present an overall comparison between different types of fields according to their correlation, centered root-mean squared (RMS) difference, and standard deviations. The correlation coefficient is used to quantify the similarity of different types of data. However, it is impossible to determine the range of variation using only the correlation. The centered RMS is then used to quantify the differences between different types of fields. Moreover, the standard deviations are also needed to give more complete properties for each type of fields.
Figure 2 shows an overall comparison between the VIIRS SST and eight types of
in situ data in Taylor diagram. The matchups are compartmentalized into daytime and nighttime to examine their difference. The angle to the horizontal axis indicates the correlation. In general, all types of
in situ SST have very high correlation (larger than 0.99) with the VIIRS SST except the CRW. The standard deviations of
in situ SST are normalized to the VIIRS SST. The VIIRS SST is, thus, located on the horizontal axis with a standard deviation of 1.0. The ratio of standard deviations is the distance from the origin of coordinate. Take the daytime GTS-ship and IMOS ships SST for example, their correlation with the VIIRS SST is similar, but the standard deviation of IMOS is lower than the VIIRS SST, by contrast, the standard deviation of GTS-ship SST is higher than the VIIRS SST. The normalized centered RMS for each type of
in situ SST is the distance to the VIIRS SST. The GTS-Drifter and HR-Drifter present the lowest centered RMS errors and highest correlations. It shows a higher clustering around the VIIRS SST during nighttime. It means that the nighttime difference between the
in situ SST and the VIIRS SST is a little smaller than the daytime.
Figure 2.
Comparisons between the NAVO S-NPP VIIRS SST and different types of in situ SST in Taylor diagram: (a) daytime; and (b) nighttime. Blue dot lines represent the normalized centered RMS error.
Figure 2.
Comparisons between the NAVO S-NPP VIIRS SST and different types of in situ SST in Taylor diagram: (a) daytime; and (b) nighttime. Blue dot lines represent the normalized centered RMS error.
The values of centered RMS error and the standard deviation are listed in
Table 2. Additionally, the number of matchups and the mean bias (VIIRS-
in situ) are also provided to complement the information, since the overall bias has been removed in Taylor diagrams. The overall root-mean-square error (RMSE) can be derived from the square root of the sum of the squares of bias and centered RMS.
The difference is mainly coming from the observation errors by different sensors and the depth at which they measured. Donlon
et al. [
28] pointed out that the variability of vertical thermal structure at the upper ocean(~10 m) layer is complex, depending on the ocean mixing and air-sea exchange. Since the NAVO S-NPP VIIRS SST are regressed to a nominal depth 1 m, the mooring usually has a thermometer at ~3 m depth, drifter buoys are placed at ~0.2 m depth, ships and Argo measures several meters [
29], the difference in near surface temperature vertical gradients should not be neglected. It results in a small positive bias for the NAVO S-NPP VIIRS SST with respect to the
in situ SST which at greater depths, except the daytime tropical mooring. It should be caused by the NAVO S-NPP VIIRS SST retrieval algorithm. For the daytime algorithm, only two infrared channels M15 and M16, which are sensitive to columnar water vapor content, are used to derive the SST. In contrast, for the nighttime algorithm, an additional mid-infrared channel M12 is available and especially useful in the high water vapor conditions. The tropical moorings locate in the tropical regions where the water vapor is high. Thus, the high water vapor would affect the radiance in infrared channels and lead to large bias in daytime. A very small negative bias with RMSE less than 0.4 °C for both daytime and nighttime is found between the NAVO S-NPP VIIRS SST and GTS-Drifter and HR-drifter measured SST. Additionally, although a series of strict time and space collocation criteria is adopted in this study, the measurement at different time of day may also contribute to the bias. The centered RMS error of ship SST is higher than other
in situ SST when compared with the NAVO S-NPP VIIRS SST.
5. Uncertainties in the VIIRS SST
The aim of validation in this study is to assess the magnitude and characteristics of uncertainties in the NAVO N-SPP VIIRS SST. Considering this, the overall RMSE of
in situ measured SST should be small and the distributions of matchups should be uniform in space and time. Therefore, only the GTS-Drifter and HR-drifter (collectively called drifter) matchups are used to validate the NAVO N-SPP VIIRS SST according to the distributions showed in
Section 3 and overall error statistics obtained in
Section 4. The method of three-way error analysis enables the calculation of standard deviation of error on each observation from the collocations of three different types of observation. The matchups of the NAVO N-SPP VIIRS SST and drifter-measured SST are then collocated to the AQUA MODIS SST under the same match criteria.
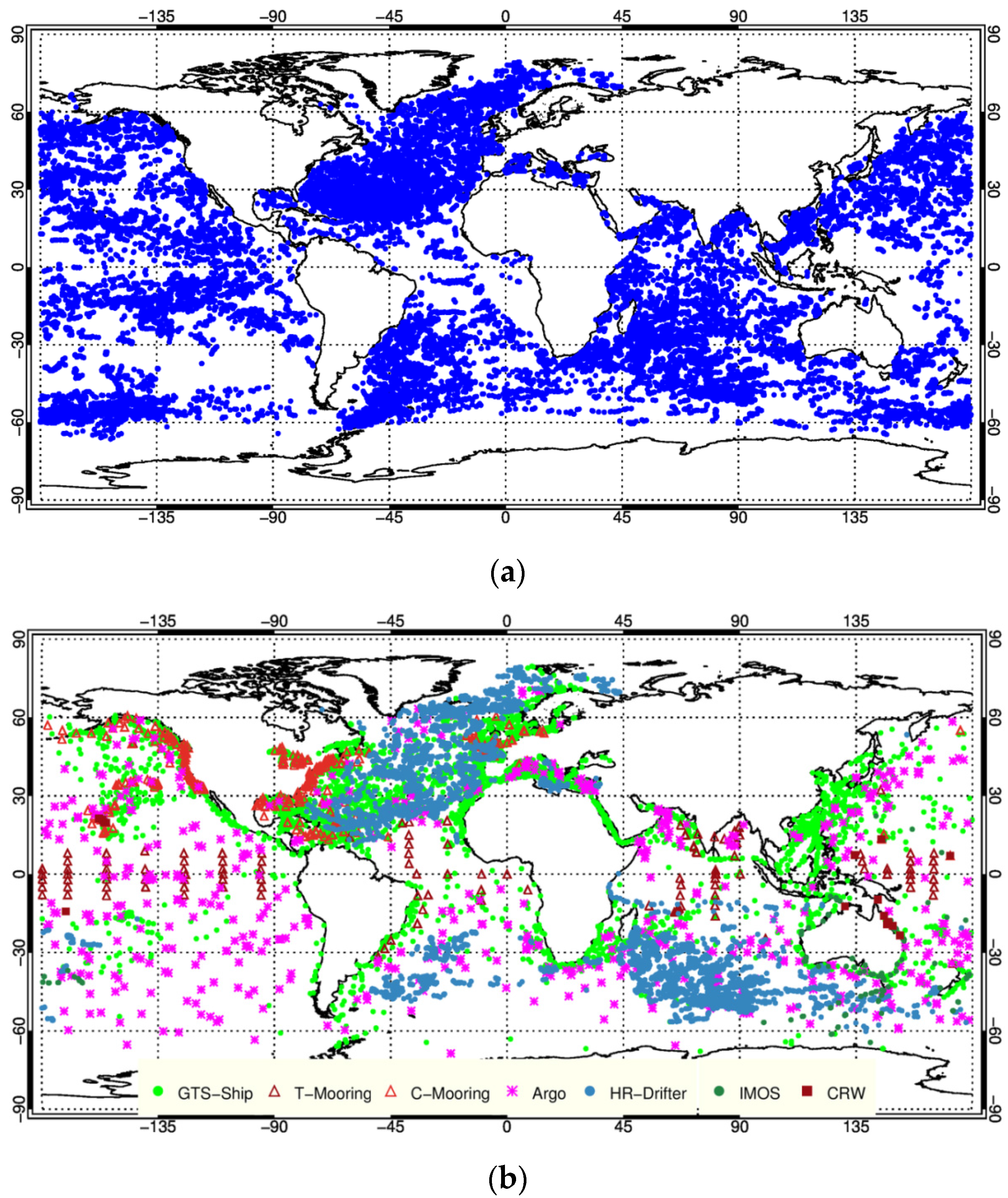
Figure 3 shows the global distribution of mean biases in 5° × 5° boxes for the NAVO N-SPP VIIRS SST and the AQUA MODIS SST with respect to the drifter-measured SST during 2014. The biases are small and uniform in the majority of the global ocean. However, pronounced warm biases in the NAVO N-SPP VIIRS SST even up to 0.5 °C are observed in the Southern Hemisphere at high latitudes. Near-zero biases are observed in MODIS SST in these regions. It means that these biases may be caused by the NAVO N-SPP VIIRS SST retrieval algorithm rather than the nature of the SST.
Figure 3.
Global distribution of mean biases in 5° × 5° boxes for (a) the NAVO N-SPP VIIRS SST and (b) the AQUA MODIS SST with respect to the drifter measured SST during 2014.
Figure 3.
Global distribution of mean biases in 5° × 5° boxes for (a) the NAVO N-SPP VIIRS SST and (b) the AQUA MODIS SST with respect to the drifter measured SST during 2014.
Three-way error analysis was firstly proposed to validate the wind speeds [
30]. O’Carroll
et al. [
31] made a specific description for this method and applied it to calculate the standard deviation of error on two satellite sensors and drifting buoy SST. Similar analysis has been done to evaluate
in situ data for satellite calibration and validation [
15]. If the random errors
σ are uncorrelated then they can be derived as follows:
where
D,
V, and
M indicate the observation types for Drifter, the NAVO N-SPP VIIRS, and the AQUA MODIS, respectively.
VDV is the variance of the difference between Drifter and the VIIRS,
VDM is the variance of the difference between Drifter and MODIS,
VVM is the variance of the difference between the VIIRS and MODIS.
Following O’Carroll
et al. [
31] and Xu
et al. [
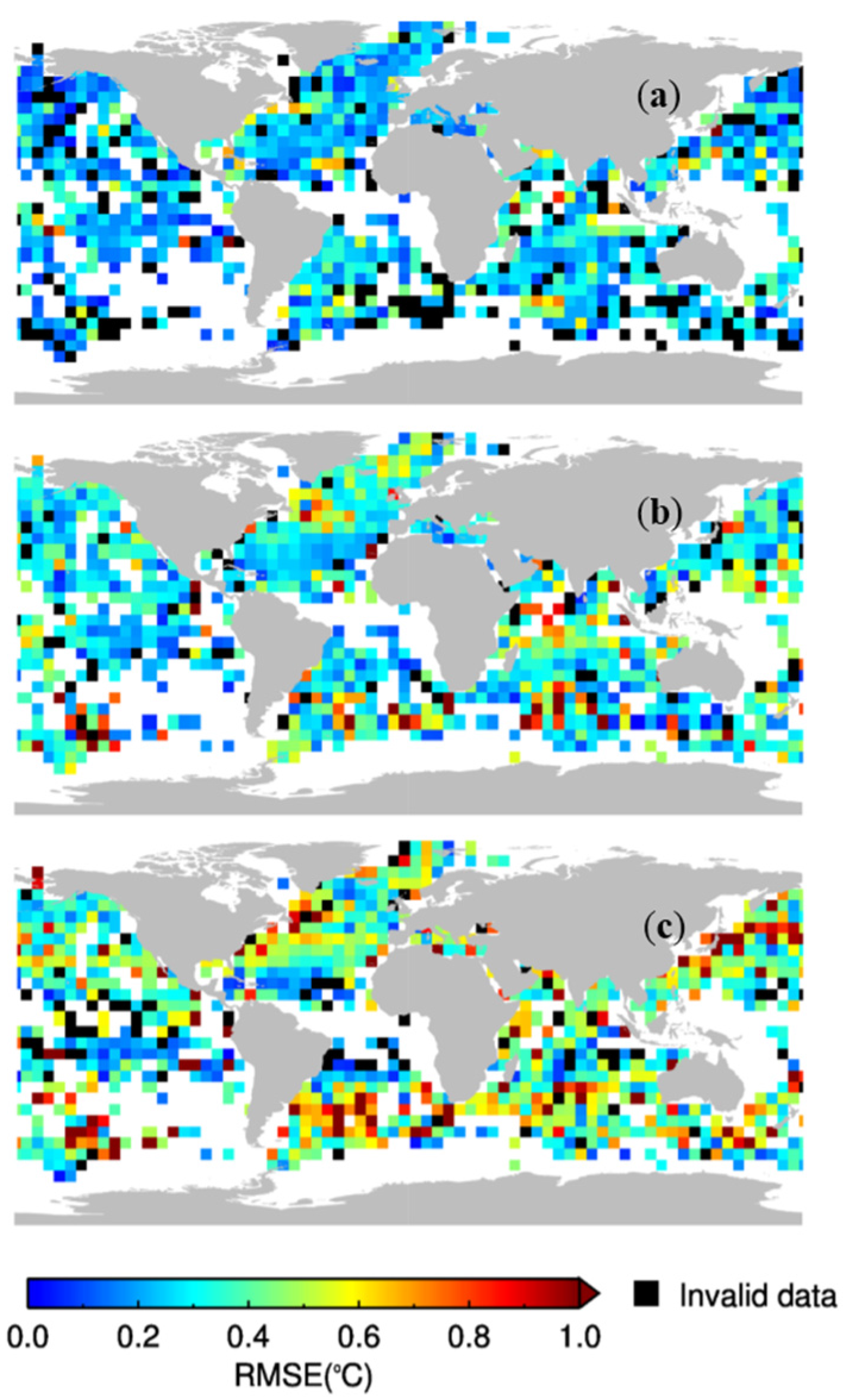
15], the three-way error analysis is applied in this study to estimate the root mean square error in the NAVO N-SPP VIIRS SST, the drifter-measured SST and the AQUA MODIS SST. The equations have been solved in each 5° × 5° bin, and the results are shown in a form of three maps in
Figure 4a,b respectively. In several bins,
σV,
σD and
σM may be not exists when
VDV +
VDM −
VVM < 0,
VDV +
VVM −
VDM < 0 and
VVM +
VDM −
VDV < 0, respectively. It is likely because errors exist in the data or there is a violation of the non-correlation assumption and the respective boxes in
Figure 4 are rendered as black color. For the drifter,
σD values are the smallest and most uniform in the three types of observations. MODIS has the largest and most complex spatial structure of random error. There are large
σM and
σV in the Southern Hemisphere at high latitudes, which appear to follow and exist around the Antarctic circumpolar front. Large gradients exist in these regions. The large
σ values may be due to real geophysical difference between a point measurement and a spatial average in high spatial varying regions. The diurnal variation usually more prominent in the skin layer which MODIS measures and the mismatch of time may lead to larger difference. Thus, the
σV values lie between the
σD and
σM.
Figure 4.
Global maps of root mean square errors (°C) in 5° × 5° resolution for (a) drifter measured SST; (b) NAVO S-NPP VIIRS SST; and (c) AQUA MODIS SST derived from three-way error analysis.
Figure 4.
Global maps of root mean square errors (°C) in 5° × 5° resolution for (a) drifter measured SST; (b) NAVO S-NPP VIIRS SST; and (c) AQUA MODIS SST derived from three-way error analysis.
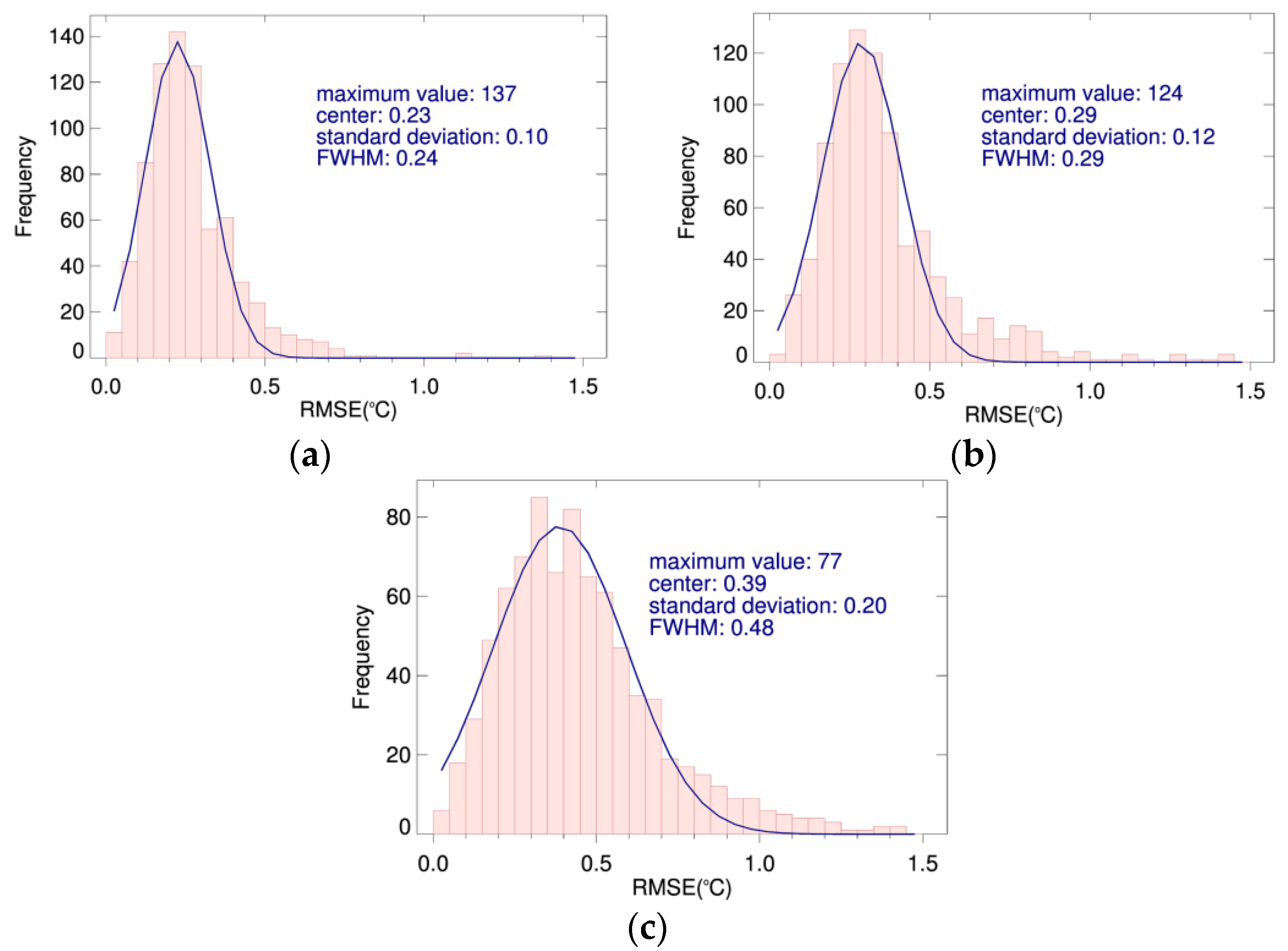
Figure 5 additionally plots histograms of
σV,
σD, and
σM from
Figure 4 in 0.05 °C bin width. As expected, the drifting buoy measurements have the smallest error. The value of
σD varies from 0 to 0.8 °C with a median of ~0.24 °C. This estimate is in good agreement with the estimates of 0.23 °C by O’Carroll
et al. [
31] and 0.26 °C by Xu
et al. [
15]. For VIIRS, the RMSE range from 0 to 1 °C with a median of ~0.31 °C. For MODIS,
σM is ~0.43 °C, but the histogram has a long tail extending out to 1.4 °C. The
σM lies between previous investigations 0.38 °C [
32] and 0.49 °C [
33].
Figure 5.
Histograms of root mean square errors in 0.05 °C bin width for (
a) drifter measured SST; (
b) NAVO S-NPP VIIRS SST and (
c) AQUA MODIS SST, corresponding to
Figure 4. The fitting of the Gaussian function to the RMSE is the blue line, the maximum value, center, standard deviation, and full-width-half-maximum (FWHM) of the Gaussian function are output on the plot as well.
Figure 5.
Histograms of root mean square errors in 0.05 °C bin width for (
a) drifter measured SST; (
b) NAVO S-NPP VIIRS SST and (
c) AQUA MODIS SST, corresponding to
Figure 4. The fitting of the Gaussian function to the RMSE is the blue line, the maximum value, center, standard deviation, and full-width-half-maximum (FWHM) of the Gaussian function are output on the plot as well.
Ideally, the distribution of random error should be normal. The Gaussian fitting shows normal in the range of 0–0.5 °C, 0–0.6 °C, and 0–0.8 °C for drifter measured SST, NAVO S-NPP VIIRS SST, and AQUA MODIS SST, respectively. However, the long tail on the right side does not fitting well in all the three type of observations. On the one hand, this can mainly result from a variety of causes that relate to how the SST is being made by the individual measurements or retrieval. For infrared remote sensing, the errors may result from the characteristics of the radiometer, and how well the measurements are calibrated, and the atmospheric correction algorithm. On the other hand, the validation techniques are also prone to error. The space-time mismatch leads to errors because of the nature of the SST variable and the temporal-spatial sampling difference in individual observations. Additionally, some of the drifting buoys may be used to derive both the VIIRS SST and MODIS SST retrieval algorithm coefficients, thus they are not completely uncorrelated and the RMSE estimated here may not be fully accurate by using three-way error analysis. The distributed characteristics of the RMSE should be considered for several analysis techniques, as in data assimilation and the merging of the satellite and in situ datasets.
6. Conclusions
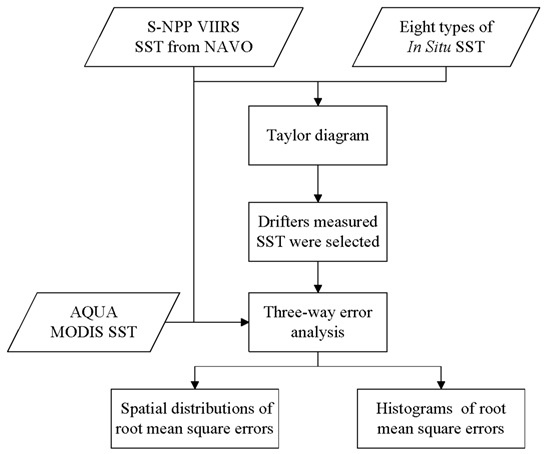
This study was devoted to the analysis of the magnitude and characteristics of uncertainties in the NAVO S-NPP VIIRS SST. Eight types of in situ SST from five independent sources were collocated to the VIIRS SST within ±1 h and within ±0.05° of latitude and longitude. The distribution of the matchups shows that the drifters provide densest and most complete global coverage and other types of in situ data are only available in some limited areas.
An overall comparison results are performed in Taylor diagrams. They show that all types of in situ SST have very high correlation with the VIIRS SST except the CRW. The GTS-Drifter and HR-Drifter present very small negative mean bias and lowest center RMS errors less than 0.4 °C for both daytime and nighttime. For other types of in situ observations, ships measured SST have the largest center RMS errors 0.78 °C and 0.92 °C for nighttime and daytime, respectively, and positive mean bias exist. The bias may be due to the vertical gradients in near surface temperature. The NAVO VIIRS SST is at a nominal 1 m depth, which is deeper than the drifter measured SST and shallower than other in situ SST. However, a highest negative bias exists in the daytime tropical mooring. It may be due to the water vapor influence of daytime NAVO S-NPP VIIRS SST retrieval algorithm or time mismatch within 1 h when diurnal warming happening, or both.
Based on the overall comparison, drifters measured SSTs are selected to further investigate the uncertainty in the NAVO S-NPP VIIRS SST. Another SSTs retrieved from AQUA MODIS are used to help the analysis. The three-way error analysis shows that the errors are smallest and most uniform in drifter while largest and with most complex spatial structure in AQUA MODIS SST. The NAVO S-NPP VIIRS SST lie between the drifters measured SST and AQUA MODIS SST with high accuracy, and at a median RMSE of~0.31 °C ranging from 0–1 °C. The distribution of errors shows normality except for the long tail part on the right side and this should be considered when the SST are merged with other observations or assimilated into models. Global distribution of NAVO S-NPP VIIRS SST minus drifters measured SSTs shows pronounced warm biases up to 0.5 °C in the Southern Hemisphere at high latitudes, while near-zero biases are observed in AQUA MODIS SST minus drifters measured SSTs. It means that these biases may be caused by NAVO S-NPP VIIRS SST retrieval algorithm rather than the nature of the SST. The reasons and correction for this bias need to be further studied.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




