
A Novel Method to Reconstruct Overhead High-Voltage Power Lines Using Cable Inspection Robot LiDAR Data


Abstract
:
1. Introduction
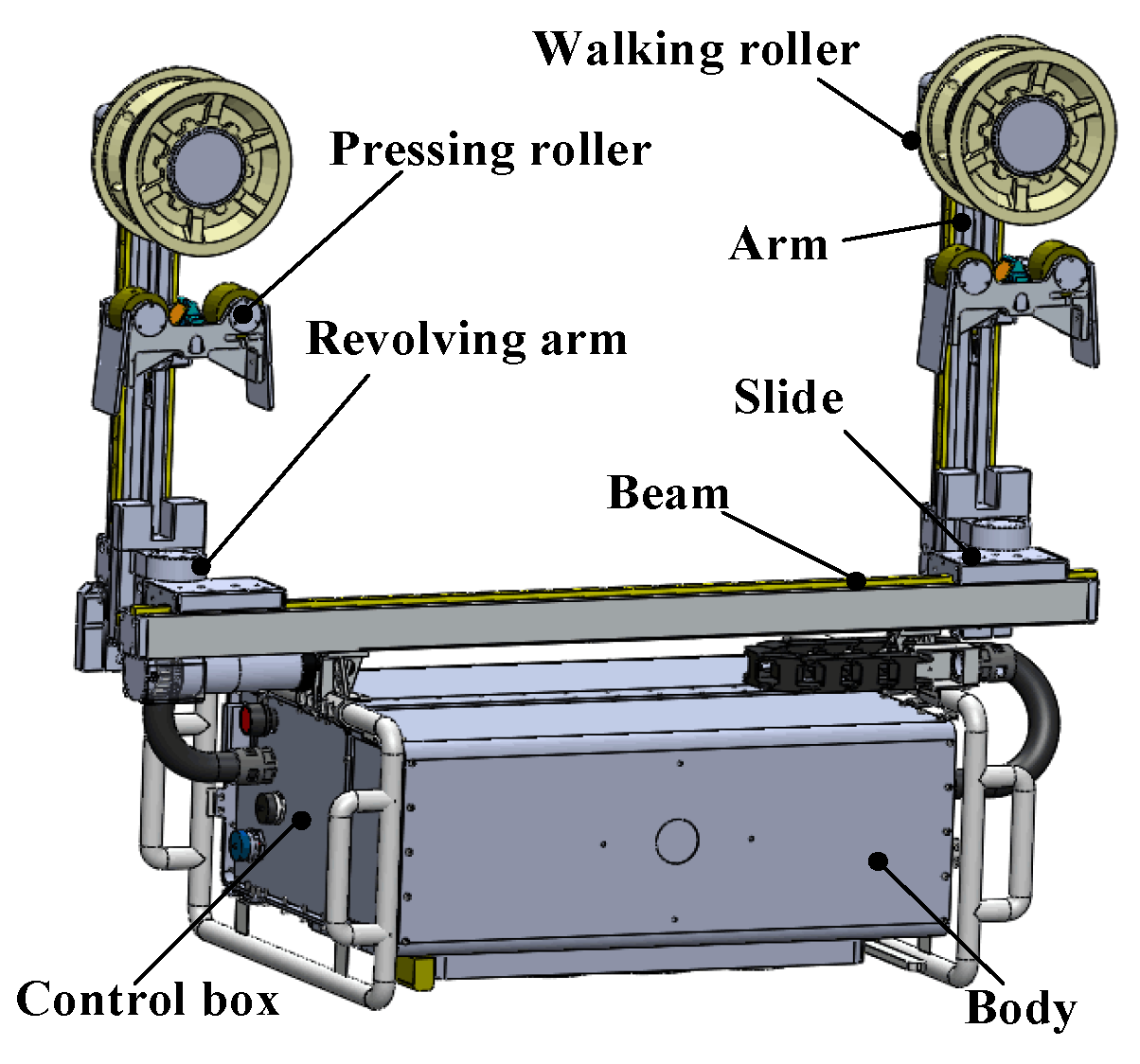
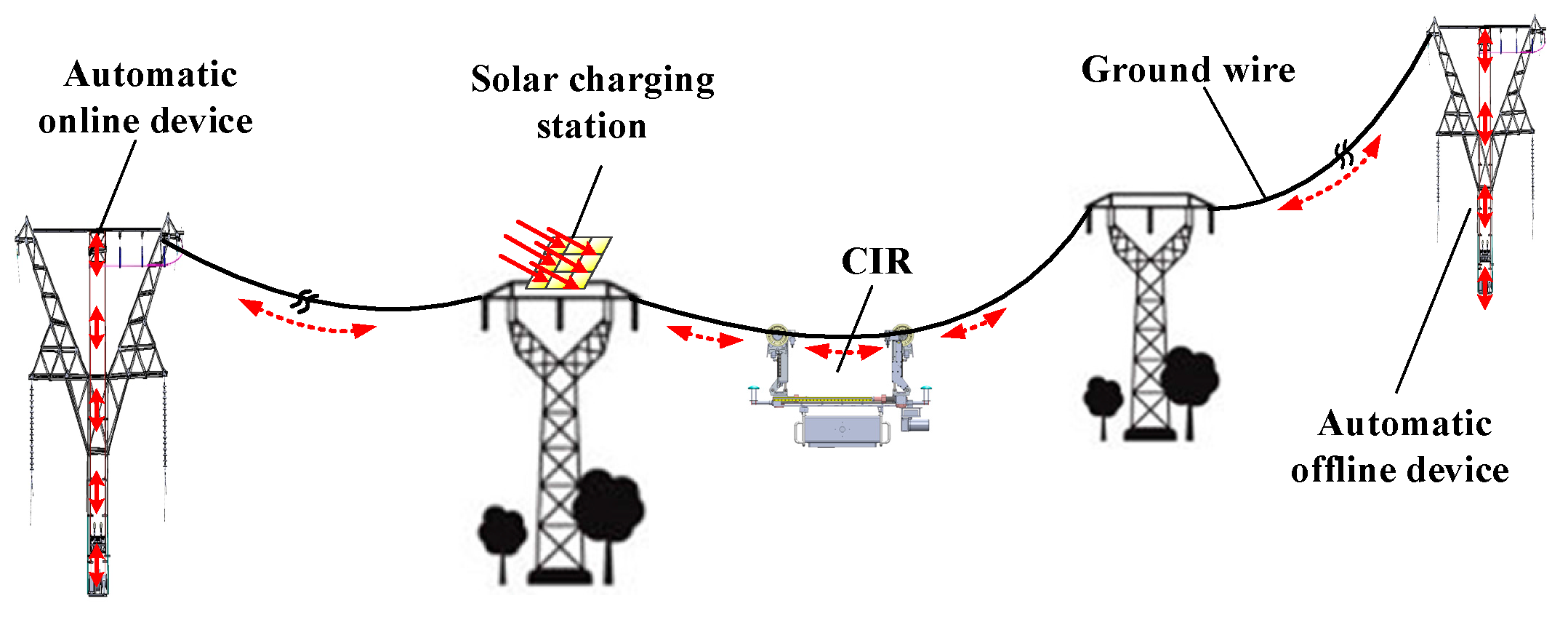
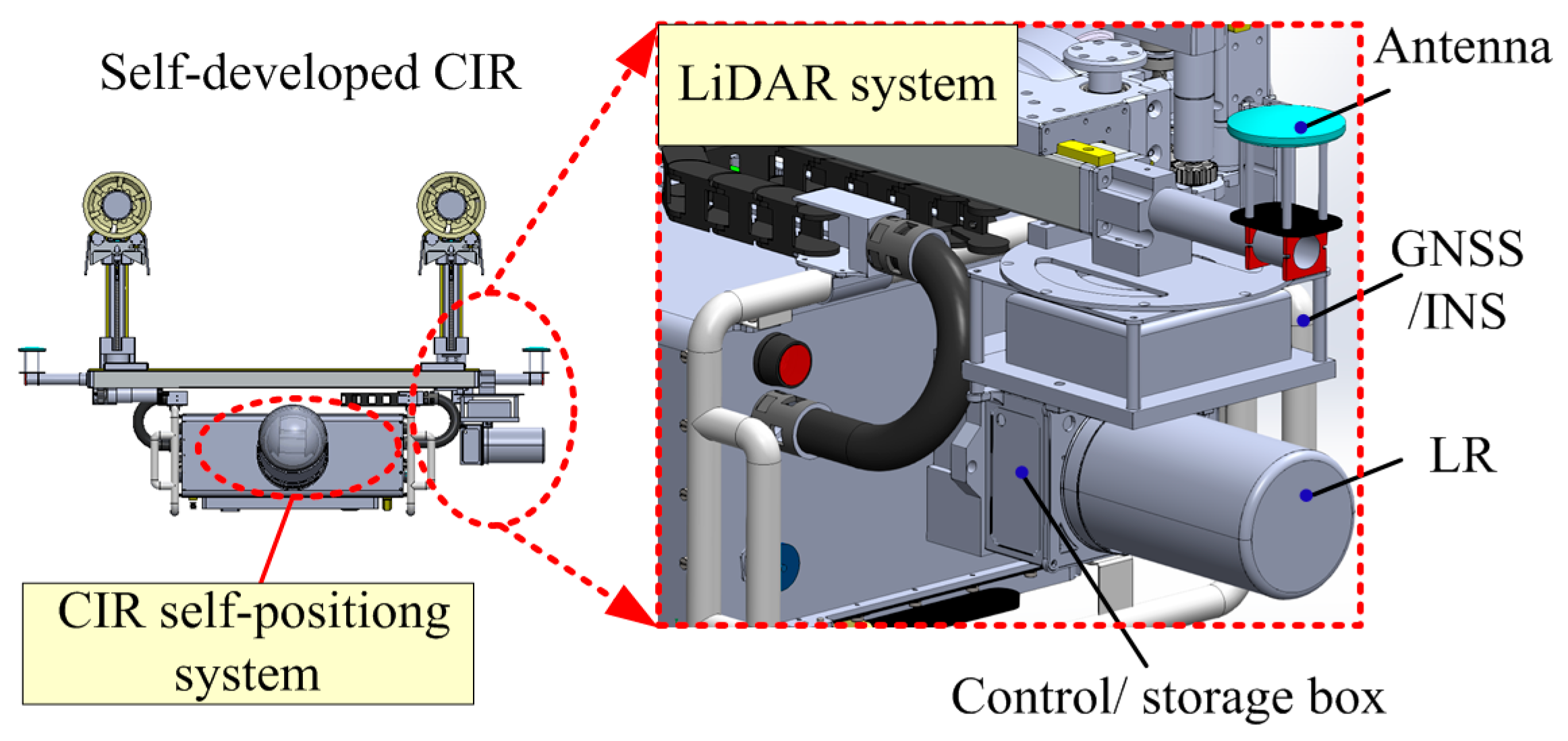
2. CIR LiDAR System
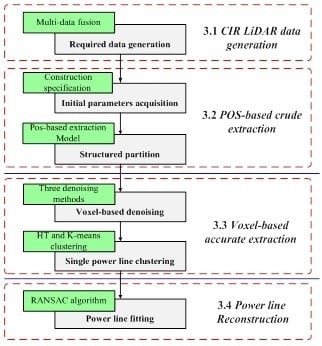
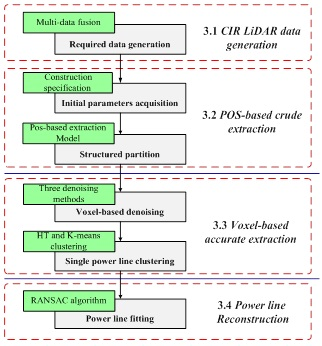
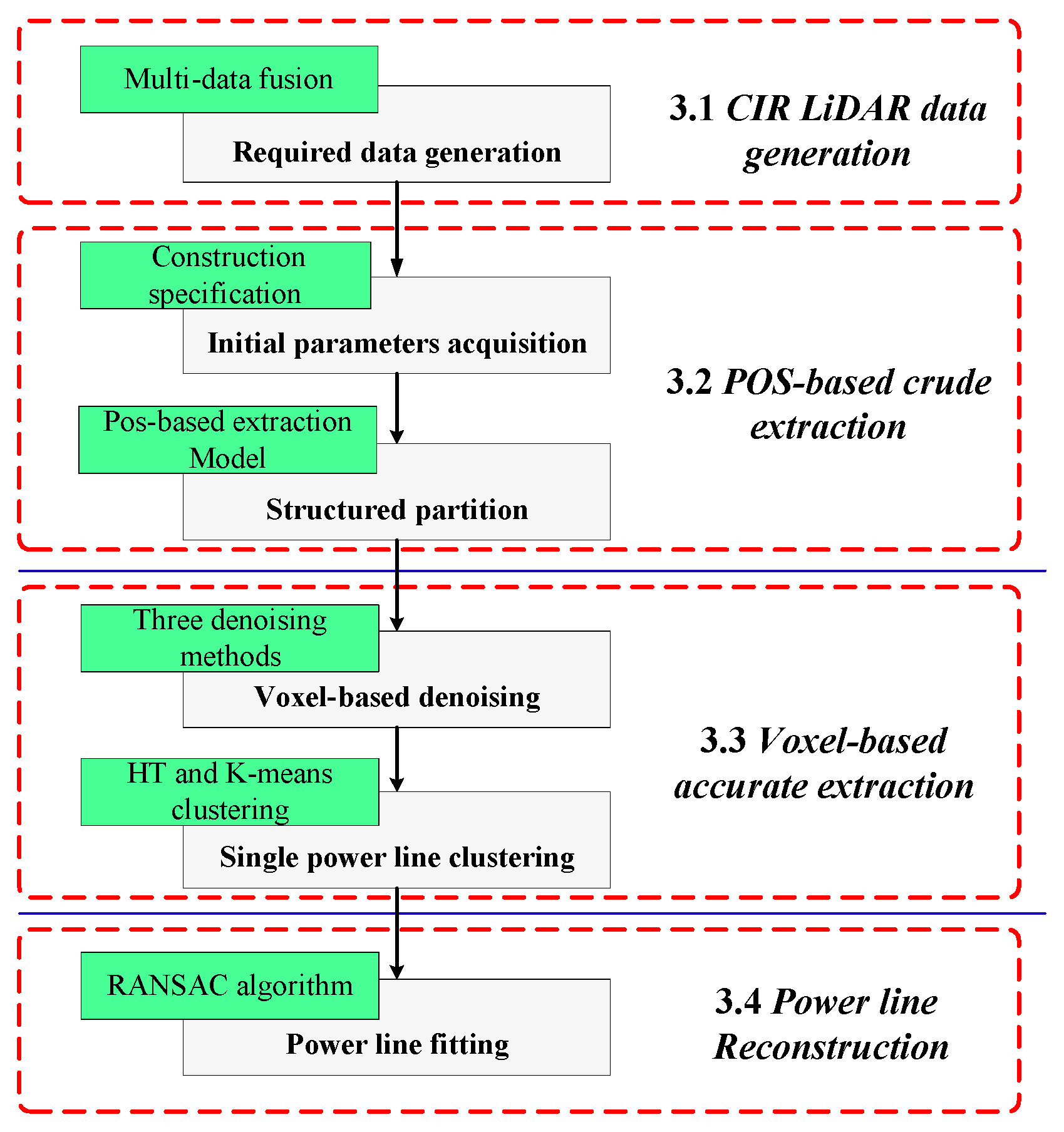
3. Methods
3.1. CIR LiDAR Data Generation
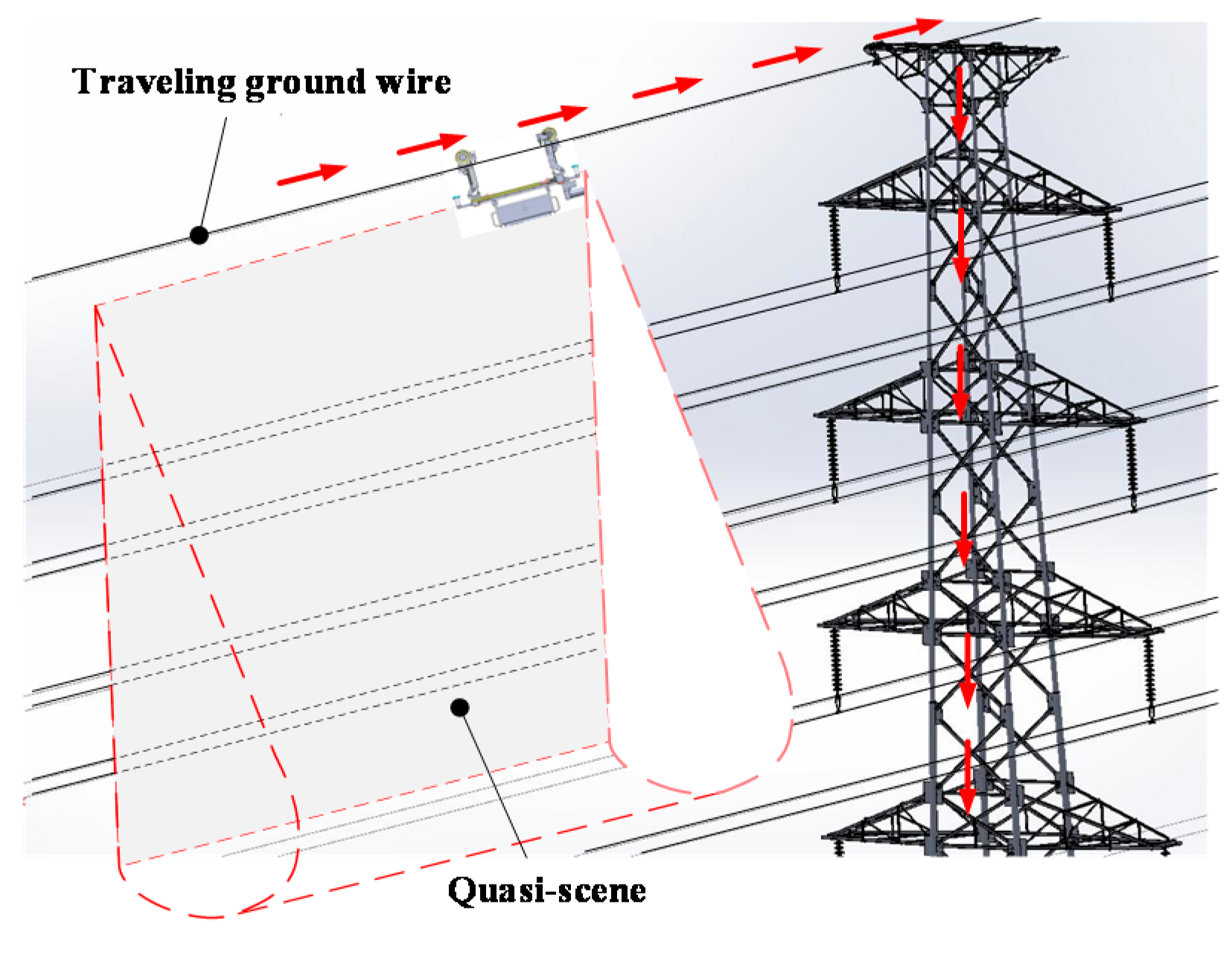
3.1.1. Data Characteristic
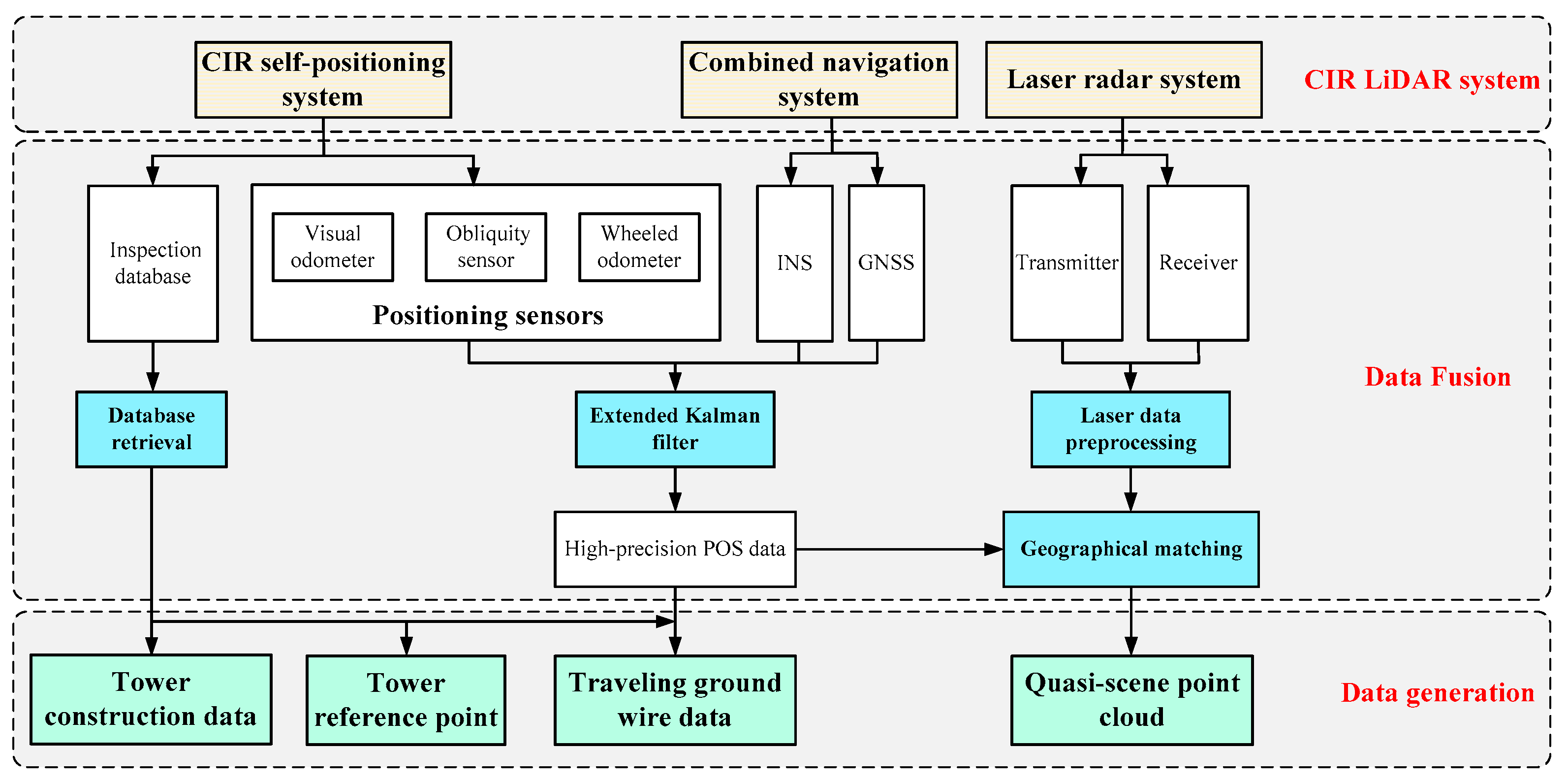
3.1.2. Data Generation
3.2. POS-Based Crude Extraction
3.2.1. Prior Data Acquisition
3.2.2. Structured Partition
- Filtering out ground points based on the prior data and the POS data, without the filtering algorithm, solves the undesired effects for steep slope or dense forest.
- Defining a strategy from layer to partition according to the topology of power lines results in the better extraction efficiency.
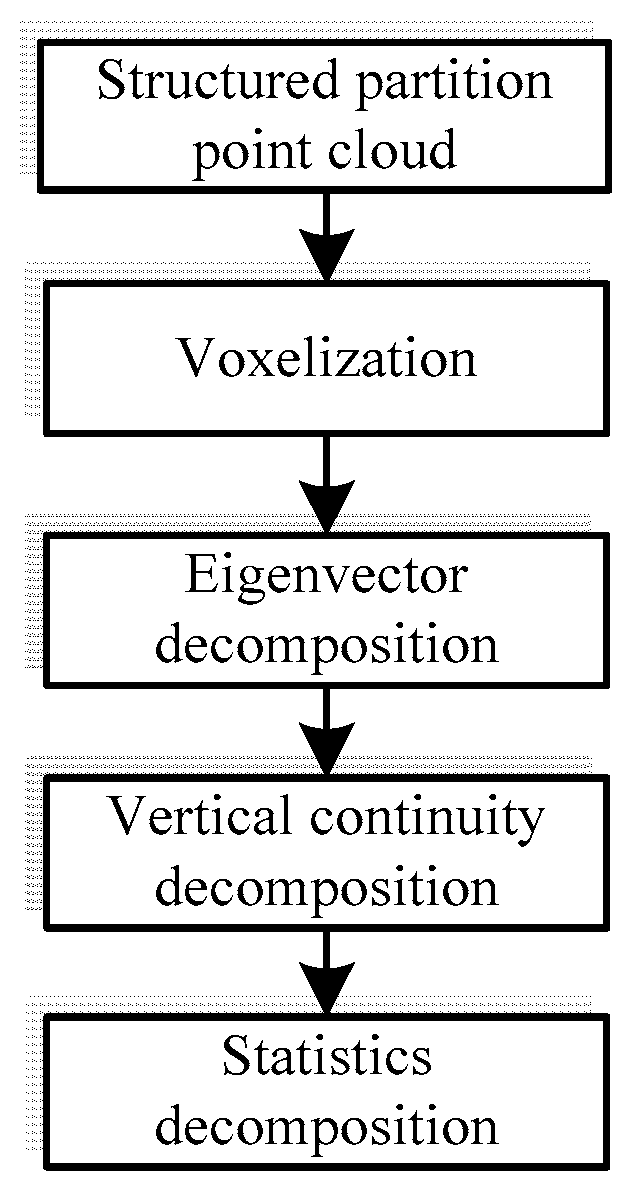
3.3. Voxel-Based Accurate Extraction
3.3.1. Voxel-Based Denoising
- Calculate the point density of voxels Dvoxel with respect to each single voxel and obtain the density interval [Dmin, Dmax] based on the maximum and minimum values of the point density. Set the minimum interval size as Ds. The range can be divided into n levels. Then, get the set S = {Sj, j = 1, 2, …, n}, where n = int((Dmax − Dmin)/Ds).
- If k = int((Dvoxel−Dmin)/Ds) equal to a certain interval value Sj, then increase the accumulation value Accj by 1, i.e., Accj = Accj + 1, to get the point density accumulation curve of Dvoxel and Acc. From the curve, the peak interval corresponds to the non-power line points and the others correspond to power line points.
- Calculate the partial derivative and find the peak interval based on the point density accumulation curve. Eliminate the points inside the grids corresponding to the peak interval and the remained points are power line points.
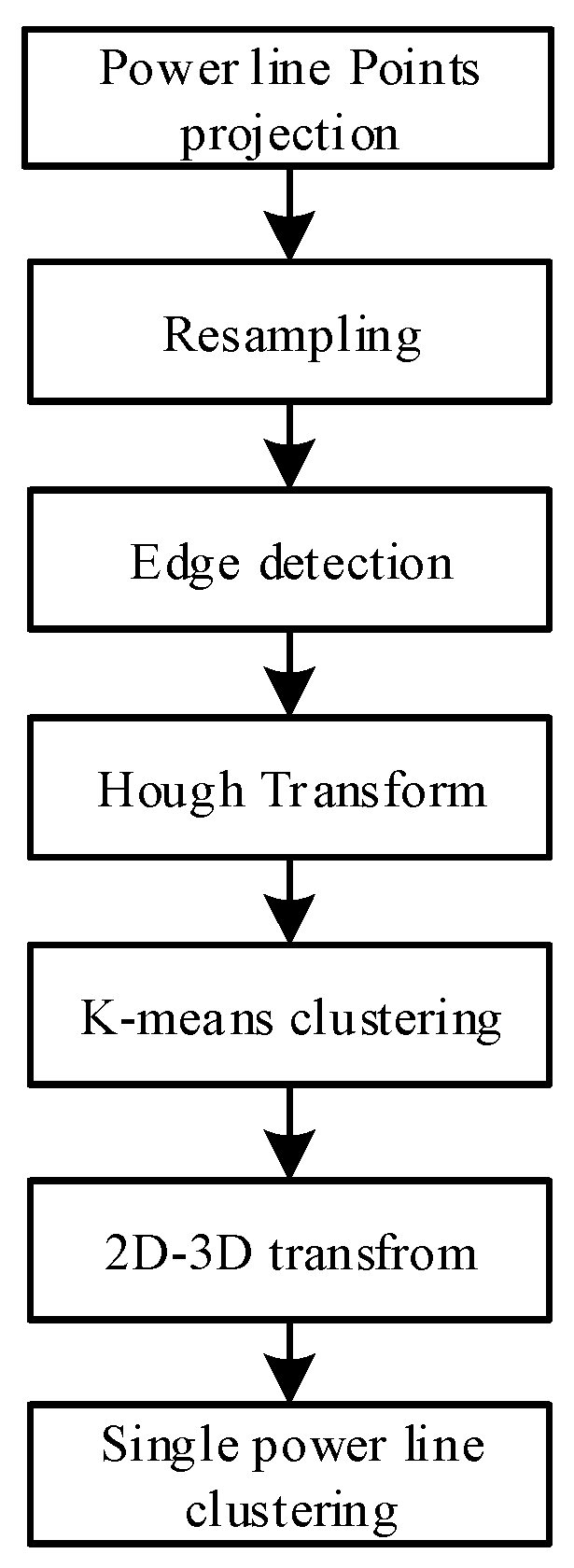
3.3.2. Single Power Line Clustering
- Link together straight line segments in the same direction, judge on connectivity according to the endpoint distance of two adjacent straight line segments.
- Delete the short line segments of the unlinked short line segments.
- Execute clustering analysis for the rest of the straight line segments in Hough space. The K-means clustering algorithm is improved by the prior data: select k random data points in Hough space to represent the initial clustering center, k is the number of the bundled conductors; assign each point in the Hough space to its nearest the center of the cluster, which makes the distance between the clustering as big as possible and the distance in clustering as small as possible.
3.4. Power Line Reconstruction
4. Experiments and Results
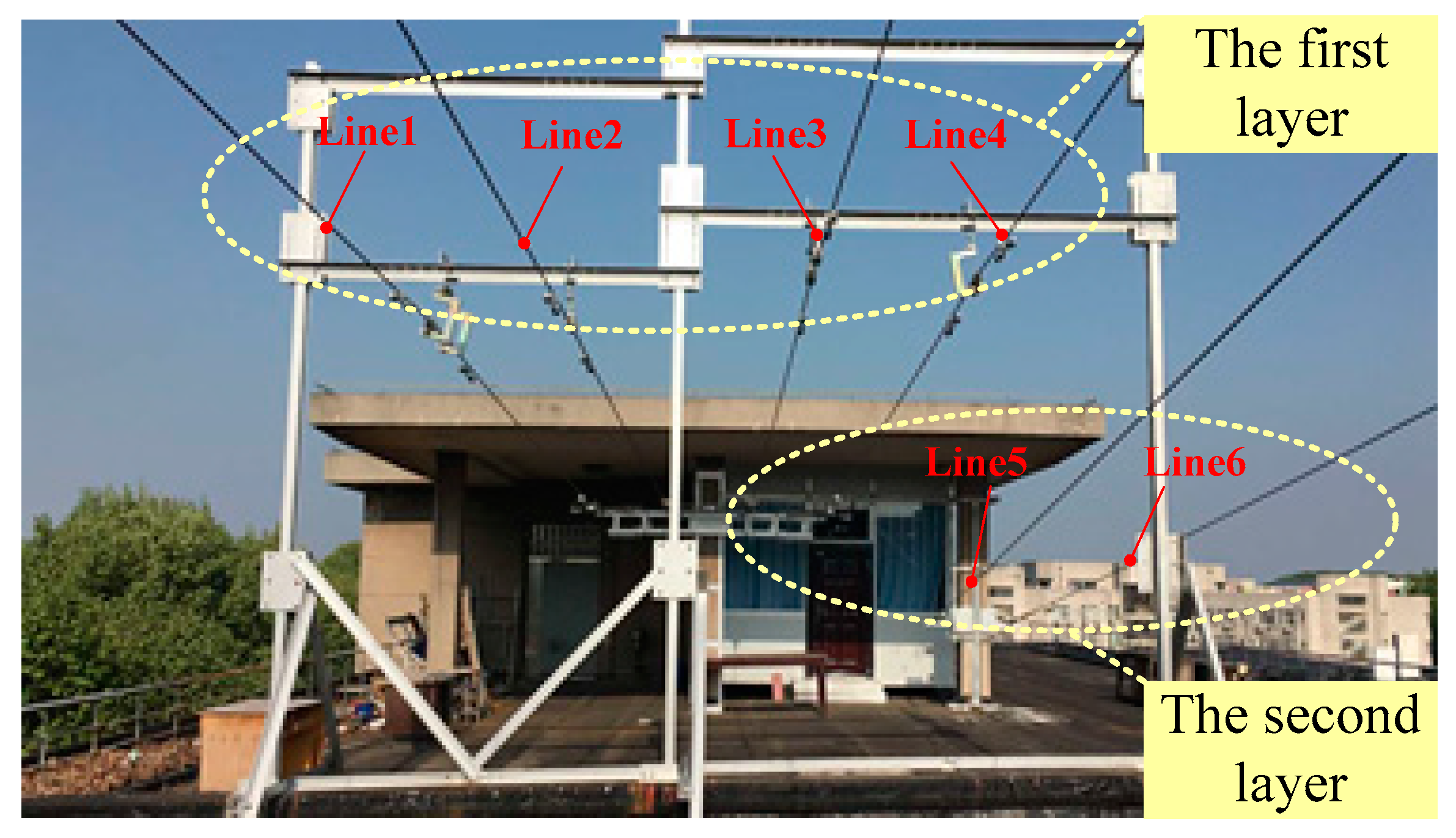
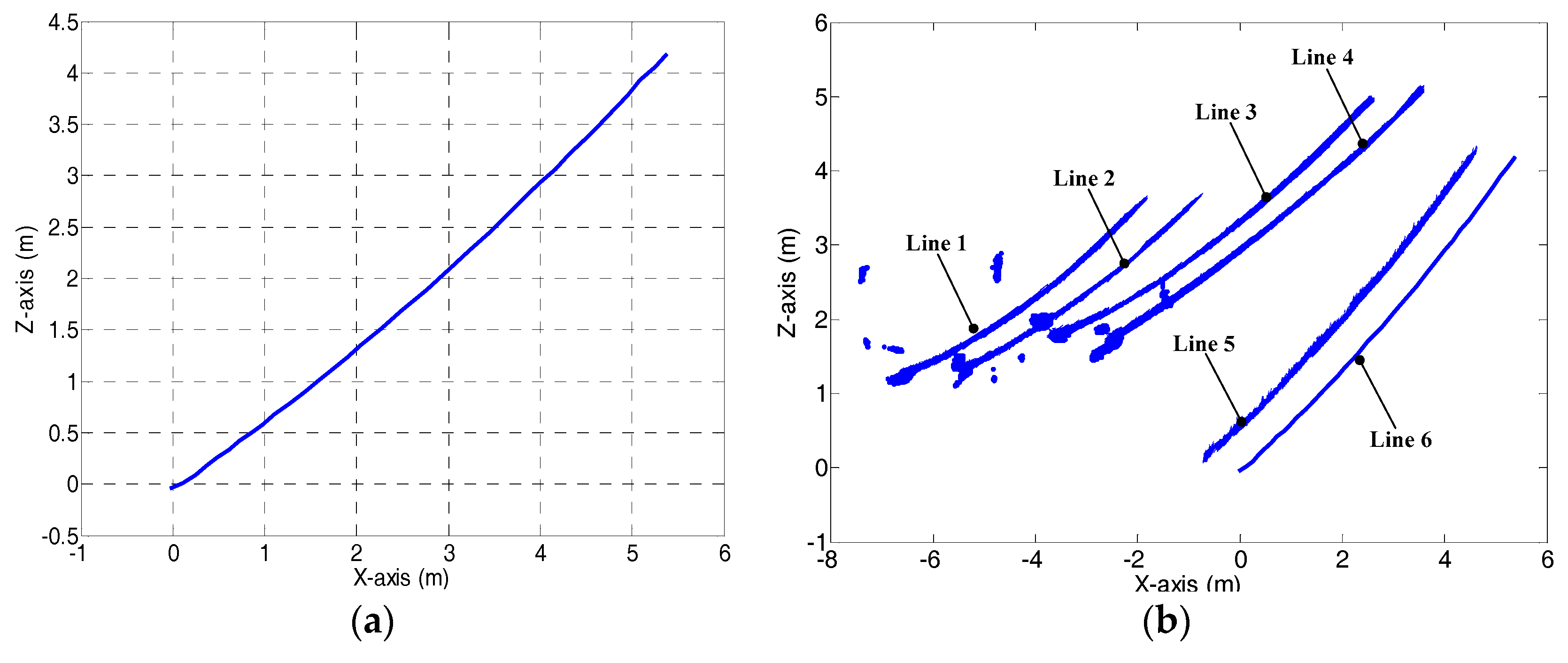
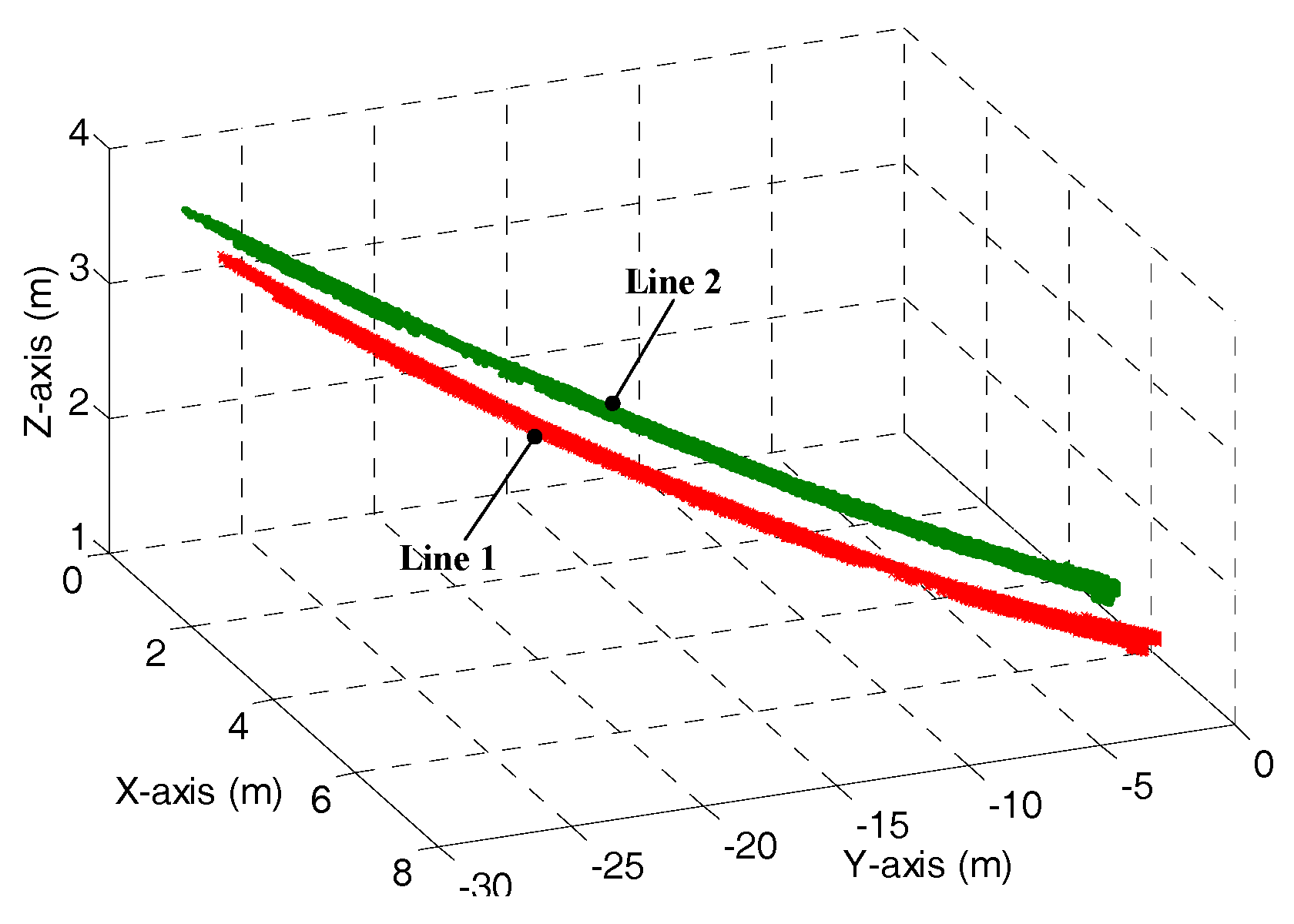
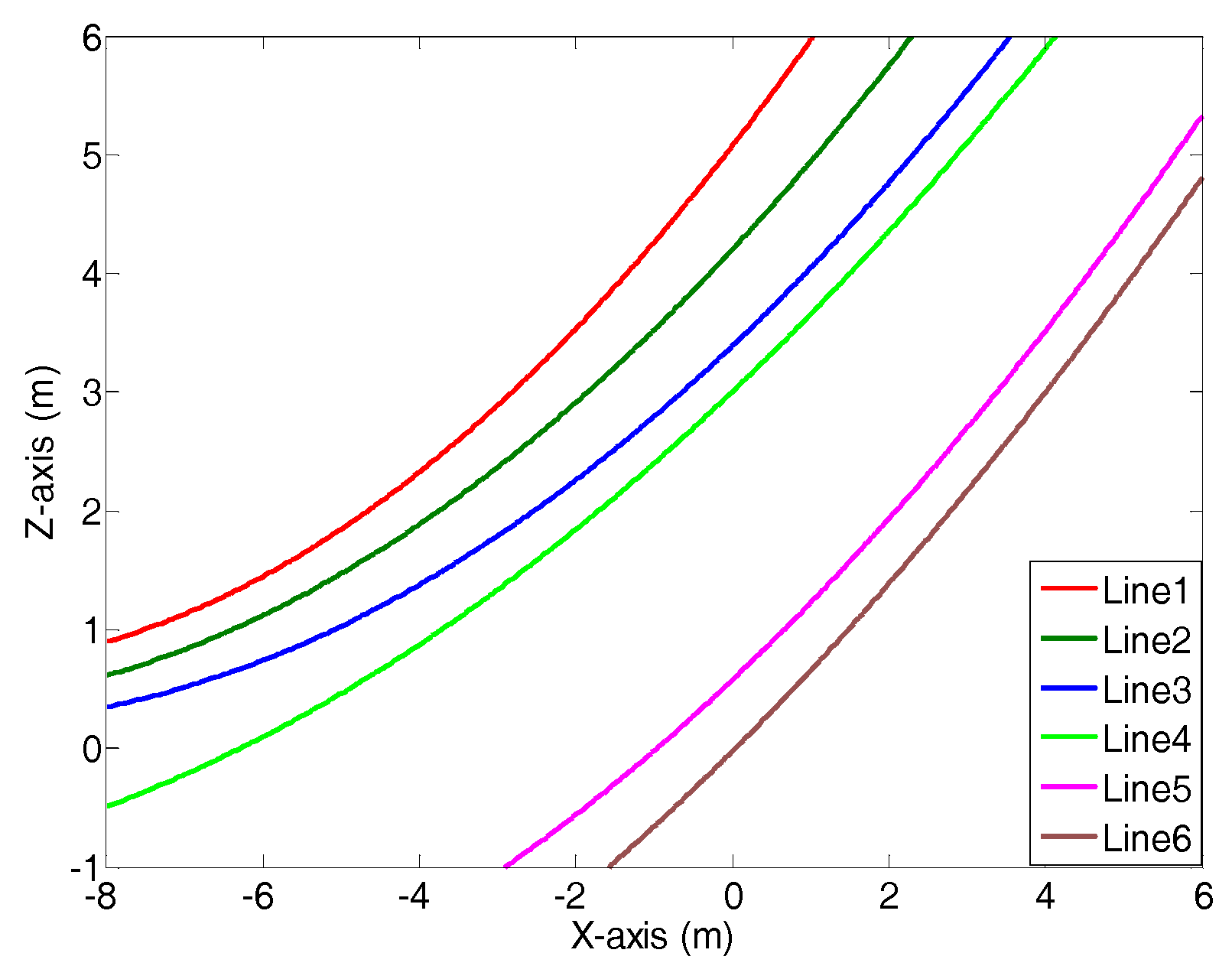
4.1. Test Site Experiment
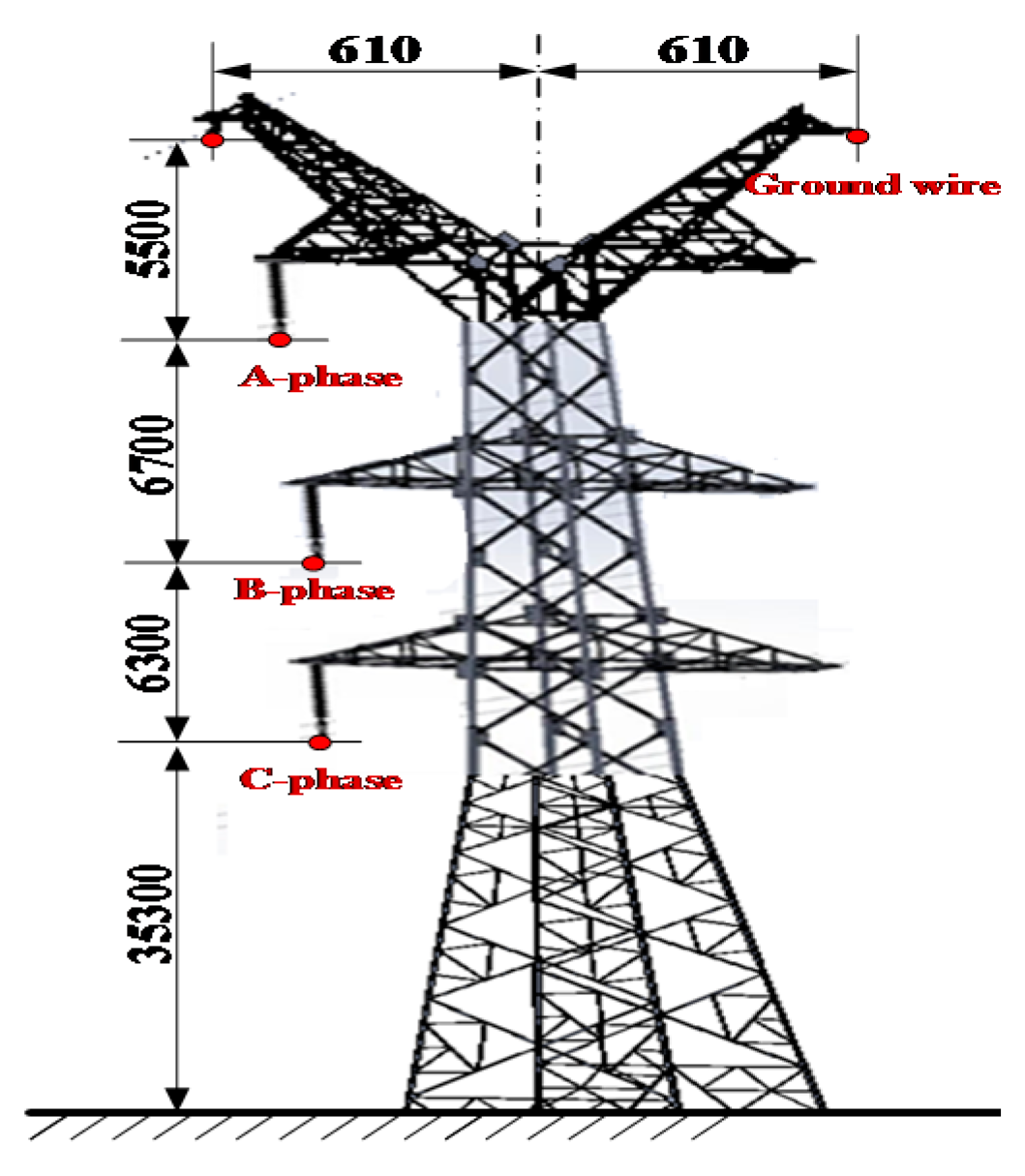
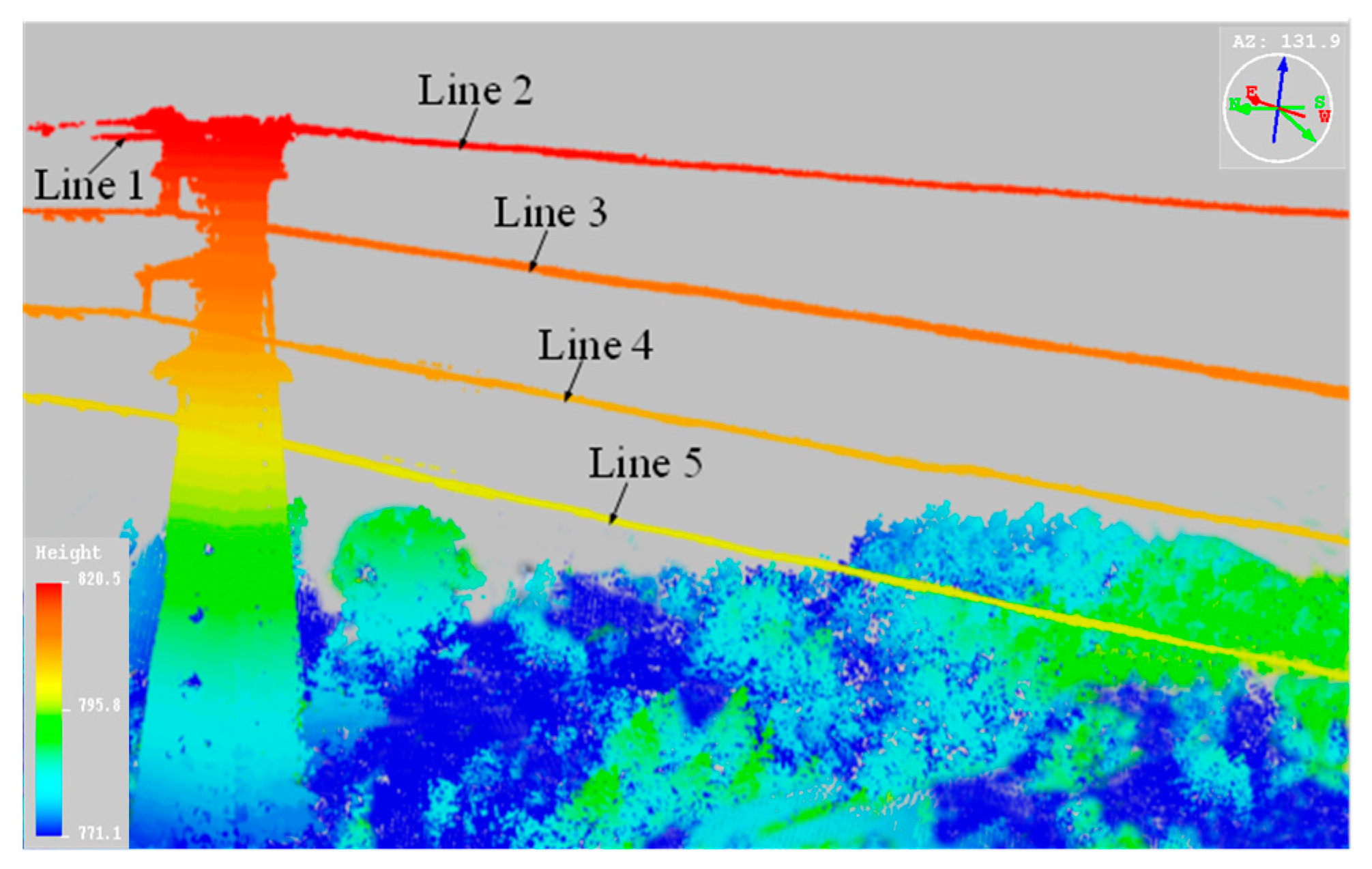
4.2. Actual Line Experiment
5. Discussion
6. Conclusions
- (1)
- The self-developed CIR has successfully completed an actual line trial, so CIR can become a new type of carrying platform to collect LiDAR data. This collection model using CIR is a good supplement for ALS and MLS to inspect transmission corridors in some complex environments (e.g., mountains and forests).
- (2)
- CIR LiDAR system can generate prior data, high-precision POS data and 3D scene data. Prior data and POS data are used to construct the POS-based extraction model to achieve structured partition. Structured partition can divide power line into some small partitions according to the topology of power lines, greatly enhancing correctness of voxel-based extraction and efficiency of reconstruction.
- (3)
- Test site experiment verifies that bundle conductors can be effectively extracted in small regions by structured partition method. Actual line experiment shows that the proposed method is feasible, with high extraction correctness over 95% and RMSE less than 0.077.
Supplementary Materials
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bamigbola, O.M.; Ali, M.M.; Oke, M.O. Mathematical modeling of electric power flow and the minimization of power losses on transmission lines. Appl. Math. Comput. 2014, 241, 214–221. [Google Scholar] [CrossRef]
- Global Transmission and Distribution Report—Infrastructure, Upcoming Projects, Investments, Key Operators and Analysis to 2020. Available online: https://www.globaldata.com/store/search/power/ (accessed on 20 July 2017).
- Qin, Y.; Xiao, X.; Dong, J.; Zhang, G.; Shimada, M.; Liu, J.; Li, C.; Kou, W.; Moore, B., III. Forest cover maps of China in 2010 from multiple approaches and data sources: PALSAR, Landsat, MODIS, FRA, and NFI. ISPRS J. Photogramm. Remote Sens. 2015, 109, 1–16. [Google Scholar] [CrossRef]
- Jardini, J.A.; Magrini, L.; Masuda, M.; Silva, P.R.; Quintanilha, J.A. Information system for the vegetation control of transmission lines right-of-way. IEEE Power Tech. 2007, 28–33. [Google Scholar]
- Ahmad, J.; Malik, A.S.; Xia, L.; Ashikin, N. Vegetation encroachment monitoring for transmission lines right-of-ways: A survey. Electr. Power Syst. Res. 2013, 95, 339–352. [Google Scholar] [CrossRef]
- Aggarwal, R.K.; Johns, A.T.; Jayasinghe, J.A.S.B.; Su, W. An overview of the condition monitoring of overhead lines. Electr. Power Syst. Res. 2000, 53, 15–22. [Google Scholar] [CrossRef]
- Torabzadeh, H.; Morsdorf, F.; Schaepman, M.E. Fusion of imaging spectroscopy and airborne laser scanning data for characterization of forest ecosystems—A review. ISPRS J. Photogramm. Remote Sens. 2014, 97, 25–35. [Google Scholar] [CrossRef]
- Wanik, D.W.; Parent, J.R.; Anagnostou, E.N.; Hartman, B.M. Using vegetation management and LiDAR-derived tree height data to improve outage predictions for electric utilities. Electr. Power Syst. Res. 2017, 146, 236–245. [Google Scholar] [CrossRef]
- Zhang, X.F.; Chen, G.; Long, D. Application prospects of helicopter laser radar technology in transmission line. Power Constr. 2008, 29, 40–43. [Google Scholar]
- Puente, I.; González-Jorge, H.; Martínez-Sánchez, J.; Arias, P. Review of mobile mapping and surveying technologies. Measurement 2013, 46, 2127–2145. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Suna, C.; Jonesa, R.; Talbota, H.; Wub, X.; Cheonga, K.; Bearea, R.; Buckleya, M.; Bermana, M. Measuring the distance of vegetation from powerlines using stereo vision. ISPRS J. Photogramm. Remote Sens. 2006, 60, 269–283. [Google Scholar] [CrossRef]
- Ashidate, S.; Murashima, S.; Fujii, N. Development of a helicopter-mounted eyesafe laser radar system for distance measurement between power transmission lines and nearby trees. IEEE Trans. Power Deliv. 2002, 17, 644–648. [Google Scholar] [CrossRef]
- Chaput, L.J. Understanding LiDAR data—How utilities can get maximum benefits from 3D modeling. In Proceedings of the International LiDAR Mapping Forum (ILMF) 2008, Denver, CO, USA, 21–22 February 2008; pp. 21–22. [Google Scholar]
- El-Sheimy, N. An overview of mobile mapping systems. In Proceedings of the FIG Working Week 2005 and GSDI-8—From Pharaos to Geoinformatics, FIG/GSDI, Cairo, Egypt, 16–21 April 2005. [Google Scholar]
- Zhang, X.; Chen, G.; Long, W.; Cheng, Z.; Zhang, K. Current status and prospects of helicopter power line inspection tour with LiDAR. Electr. Power Constr. 2008, 29, 40–43. [Google Scholar]
- Jwa, Y.; Sohn, G. A multi-level span analysis for improving 3D power-line reconstruction performance using airborne laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 97–102. [Google Scholar]
- Ou, T.G.; Geng, X.X. Application of Vehicle data acquisition system in the power-line detection. Geod. Geodyn. 2009, 29, 149–151. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Elberink, S.O.; Mass, H.G. The use of anisotropic height texture measurements for the segmentation of Ariborne Laser Scanner data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2000, 33, 678–684. [Google Scholar]
- Graham, L. Mobile mapping systems overview. Photogramm. Eng. Remote Sens. 2010, 76, 222–228. [Google Scholar]
- Stoker, J.M.; Abdullah, Q.; Nayegandhi, A.; Winehouse, J. Evaluation of Single Photon and Geiger Mode Lidar for the 3D Elevation Program. Remote Sens. 2016, 8, 767–783. [Google Scholar] [CrossRef]
- Ritter, M.; Benger, W. Reconstructing power cables from LiDAR data using eigenvector streamlines of the point distribution tensor field. Geosci. Remote Sens. Lett. 2012, 11, 549–553. [Google Scholar]
- Zhu, L.; Hyyppä, J. Fully-Automated Power Line Extraction from Airborne Laser Scanning Point Clouds in Forest Areas. Photogramm. Eng. Remote Sens. 2014, 6, 11267–11282. [Google Scholar] [CrossRef]
- Axelsson, P. Processing of laser scanner data—Algorithms and applications. ISPRS J. Photogramm. Remote Sens. 1999, 54, 138–147. [Google Scholar] [CrossRef]
- Melzer, T.; Briese, C. Extraction and modeling of power lines from ALS point clouds. In Proceedings of the 28th Workshop of the Austrian Association for Pattern Recognition, Hagenberg, Austria, 17–18 June 2004; pp. 47–54. [Google Scholar]
- McLaughlin, R.A. Extracting transmission lines from airborne LIDAR data. IEEE Geosci. Remote Sens. Lett. 2006, 3, 222–226. [Google Scholar] [CrossRef]
- Jwa, Y.; Sohn, G.; Kim, H.B. Automatic 3D Power line reconstruction using airborne LiDAR data. Int. Arch. Photogramm. Remote Sens. 2009, XXXVIII, 105–110. [Google Scholar]
- Jwa, Y.; Sohn, G. A piecewise catenary curve model growing for 3D power line reconstruction. Photogramm. Eng. Remote Sens. 2012, 78, 1227–1240. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Hayward, R.; Walker, R.; Jin, H. Classification of airborne LIDAR intensity data using statistical analysis and hough transform with application to power line corridors. In Proceedings of the IEEE Digital Image Computing: Techniques and Applications (DICTA ’09), Melbourne, Australia, 1–3 December 2009. [Google Scholar]
- Kim, H.B.; Sohn, G. Random forests based multiple classifier system for power-line scene classification. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, XXXVIII-5/W12, 253–258. [Google Scholar] [CrossRef]
- Sohn, G.; Jwa, Y.; Kim, H.B. Automatic power line scene classification and reconstruction using airborne lidar data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 1–3, 167–172. [Google Scholar] [CrossRef]
- Kim, H.B.; Sohn, G. Power-line scene classification with point-based feature from airborne LiDAR data. Photogramm. Eng. Remote Sens. 2013, 79, 821–833. [Google Scholar] [CrossRef]
- Chen, Q.; Gong, P.; Dennis, B.; Xie, G. Filtering Airborne Laser Scanning Data with Morphological Methods. Photogramm. Eng. Remote Sens. 2007, 73, 175–185. [Google Scholar] [CrossRef]
- Pingel, T.J.; Clarke, K.C.; McBride, W.A. An improved simple morphological filter for the terrain classification of airborne LIDAR data. ISPRS J. Photogramm. Remote Sens. 2013, 77, 21–30. [Google Scholar] [CrossRef]
- Susaki, J. Adaptive Slope Filtering of Airborne LiDAR Data in Urban Areas for Digital Terrain Model (DTM) Generation. Remote Sens. 2012, 4, 1804–1819. [Google Scholar] [CrossRef] [Green Version]
- Sithole, G. Segmentation and Classification of Airborne Laser Scanner Data; Delft University of Technology: Delft, The Netherlands, 2005. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Lalonde, J.F.; Vandapel, N.; Huber, D.F.; Hebert, M. Natural terrain classification using three-dimensional ladar data for ground robot mobility. J. Field Robot. 2006, 23, 839–861. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z.; Zhao, G.; Dai, W. Hierarchical extraction of urban objects from mobile laser scanning data. ISPRS J. Photogramm. Remote Sens. 2015, 99, 45–57. [Google Scholar] [CrossRef]
- Cheng, L.; Tong, L.; Wang, Y.; Li, M. Extraction of Urban Power Lines from Vehicle-Borne LiDAR Data. Remote Sens. 2014, 6, 3302–3320. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Line No. | Correct Points | Error Points | Omission Points | Correctness (%) | Integrality (%) | RMSE |
|---|---|---|---|---|---|---|
| 1 | 42881 | 0 | 0 | 100 | 100 | 0.0315 |
| 2 | 27583 | 1444 | 2716 | 95.0 | 91.0 | 0.0770 |
| 3 | 142041 | 4668 | 19873 | 96.8 | 87.7 | 0.0496 |
| 4 | 118350 | 5163 | 19236 | 95.8 | 86.0 | 0.0637 |
| 5 | 123753 | 6087 | 20569 | 95.3 | 85.7 | 0.0572 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, X.; Wu, G.; Ye, X.; Huang, L.; Lei, J. A Novel Method to Reconstruct Overhead High-Voltage Power Lines Using Cable Inspection Robot LiDAR Data. Remote Sens. 2017, 9, 753. https://doi.org/10.3390/rs9070753
Qin X, Wu G, Ye X, Huang L, Lei J. A Novel Method to Reconstruct Overhead High-Voltage Power Lines Using Cable Inspection Robot LiDAR Data. Remote Sensing. 2017; 9(7):753. https://doi.org/10.3390/rs9070753
Chicago/Turabian StyleQin, Xinyan, Gongping Wu, Xuhui Ye, Le Huang, and Jin Lei. 2017. "A Novel Method to Reconstruct Overhead High-Voltage Power Lines Using Cable Inspection Robot LiDAR Data" Remote Sensing 9, no. 7: 753. https://doi.org/10.3390/rs9070753
APA StyleQin, X., Wu, G., Ye, X., Huang, L., & Lei, J. (2017). A Novel Method to Reconstruct Overhead High-Voltage Power Lines Using Cable Inspection Robot LiDAR Data. Remote Sensing, 9(7), 753. https://doi.org/10.3390/rs9070753