National BDS Augmentation Service System (NBASS) of China: Progress and Assessment


Abstract
:
1. Introduction
2. NBASS Tracking Network and Processing Strategy
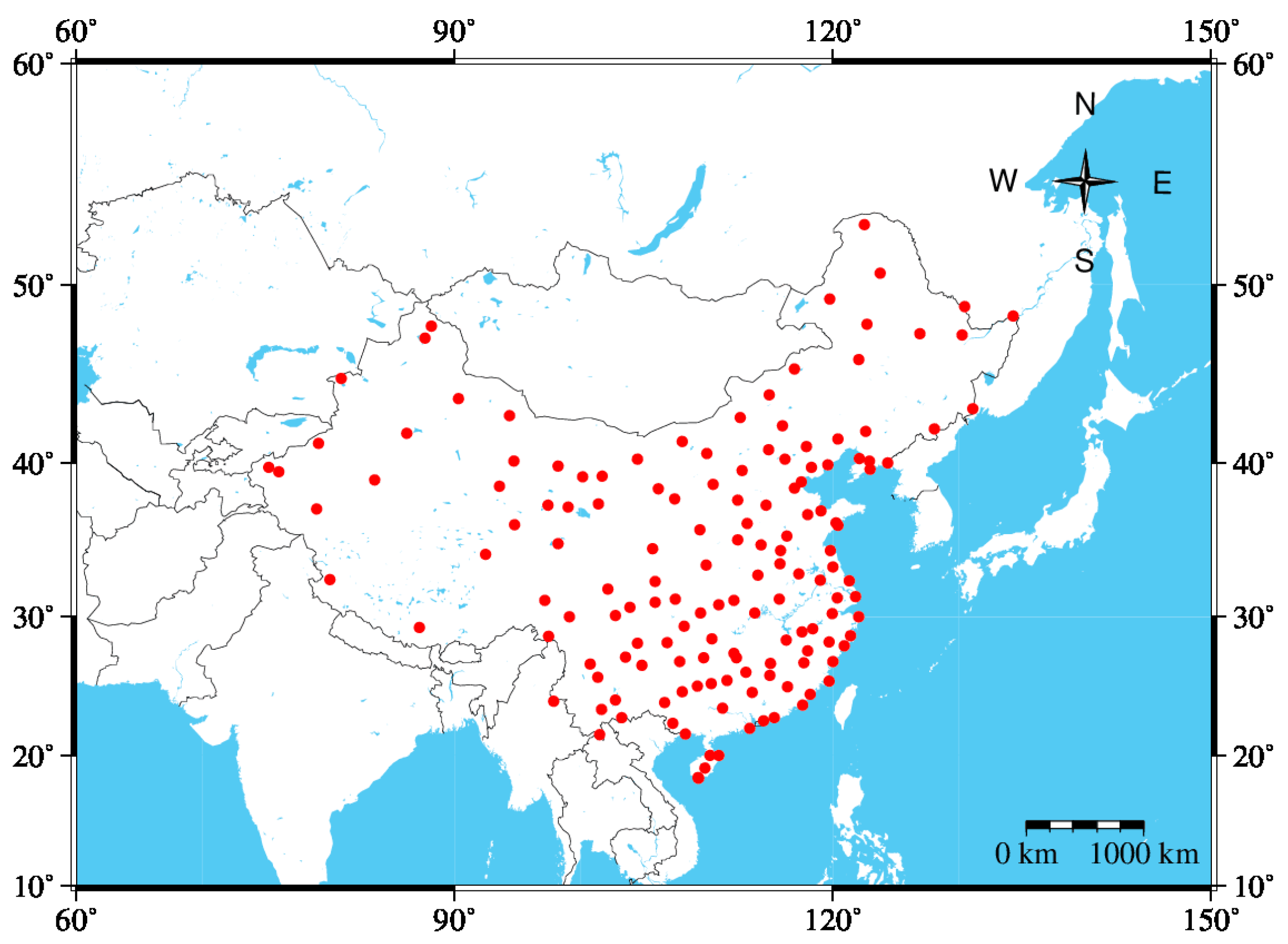
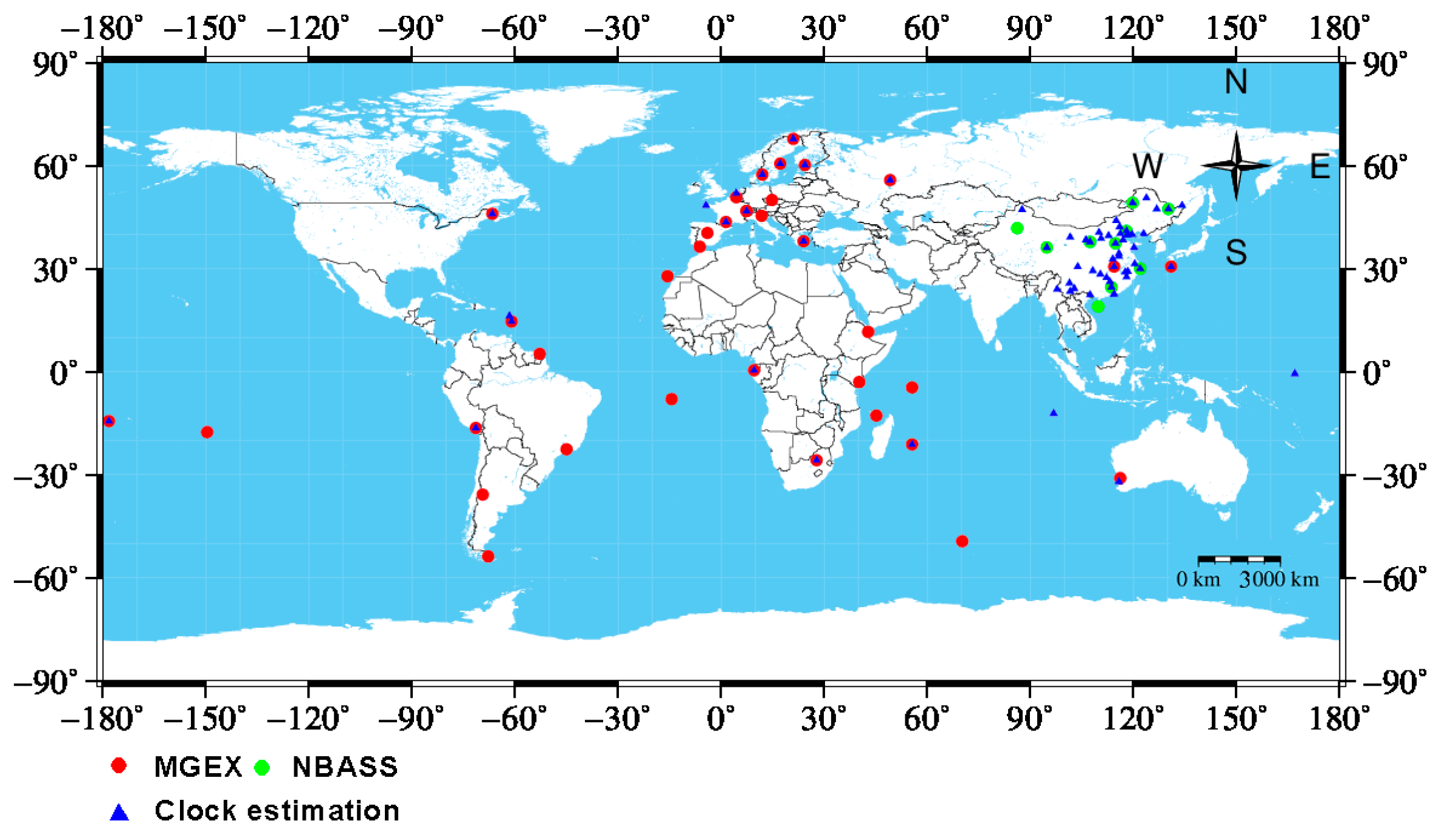
2.1. NBASS Tracking Network
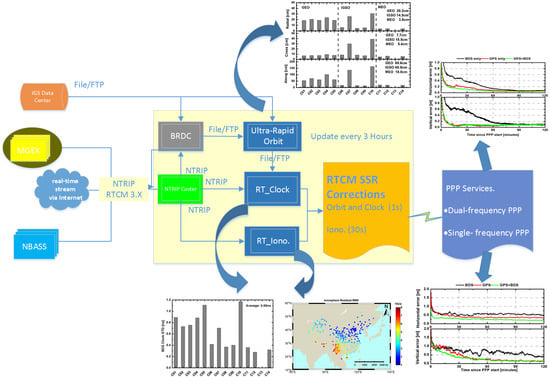
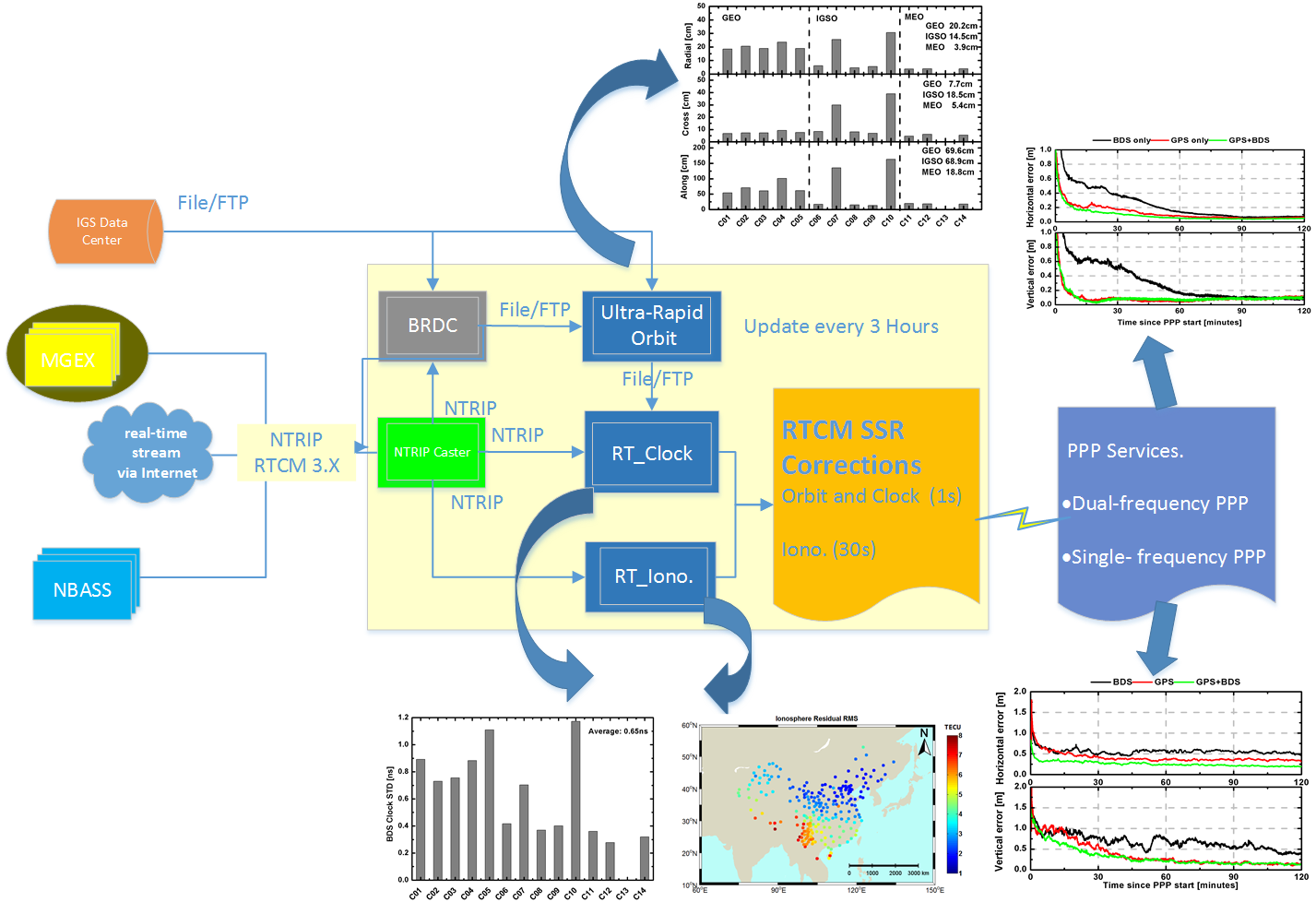
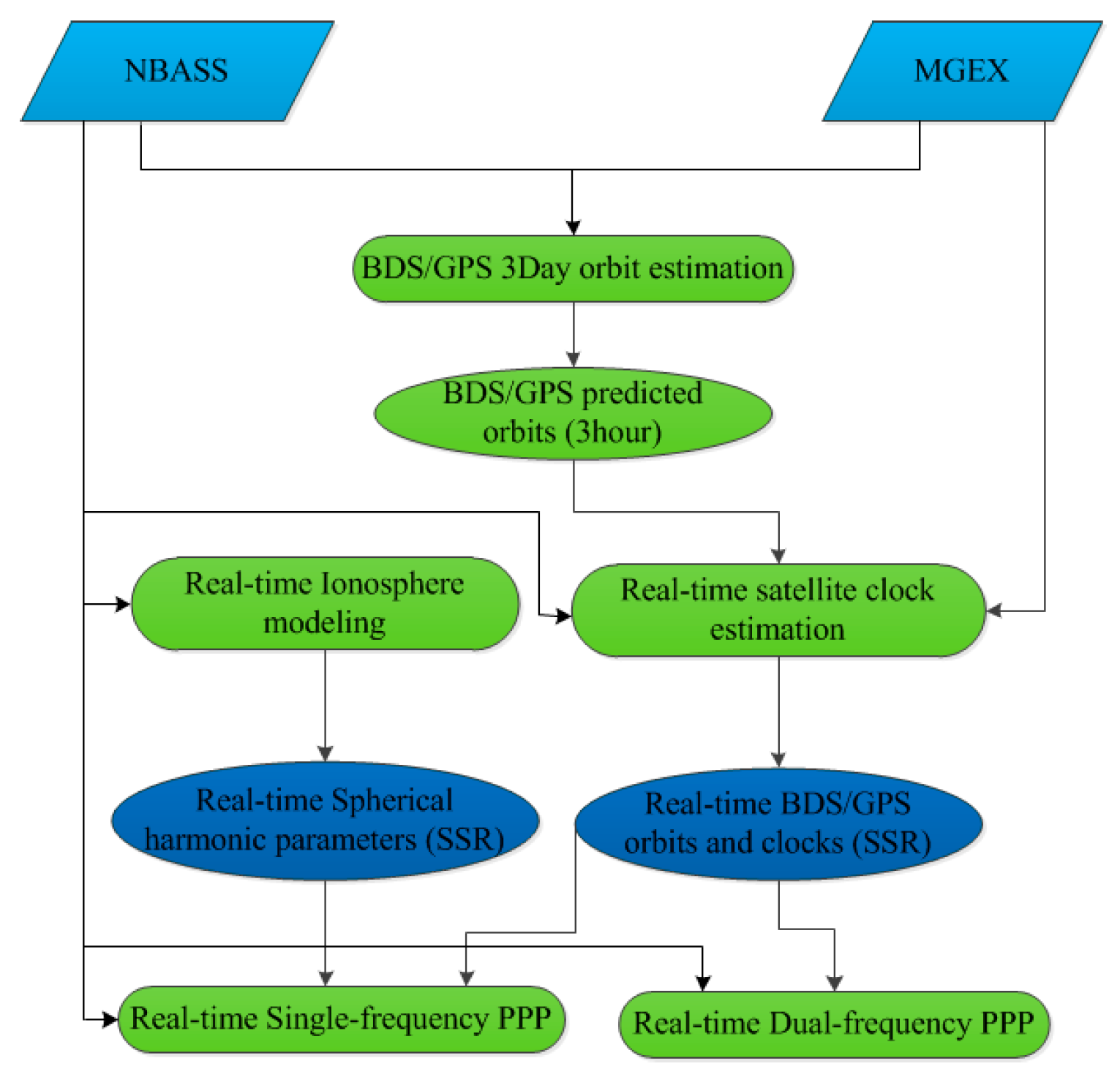
2.2. Processing Strategy
2.2.1. Orbit and Clock Products
2.2.2. Ionopshere Products
2.2.3. Real-Time PPP
3. Accuracy Evaluation of Real-Time Orbit: Clock and Ionospheric Corrections
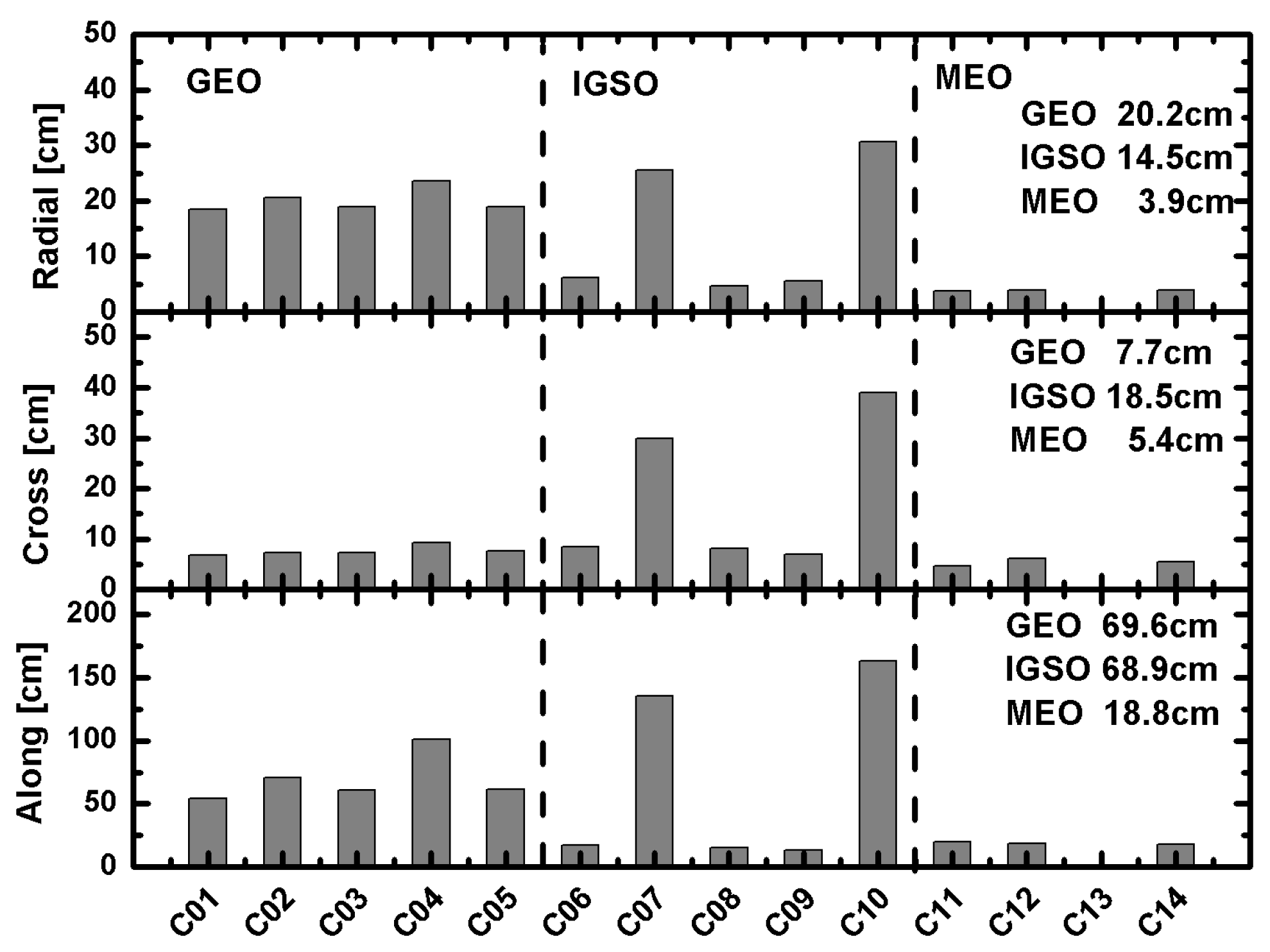
3.1. BDS Orbit Results
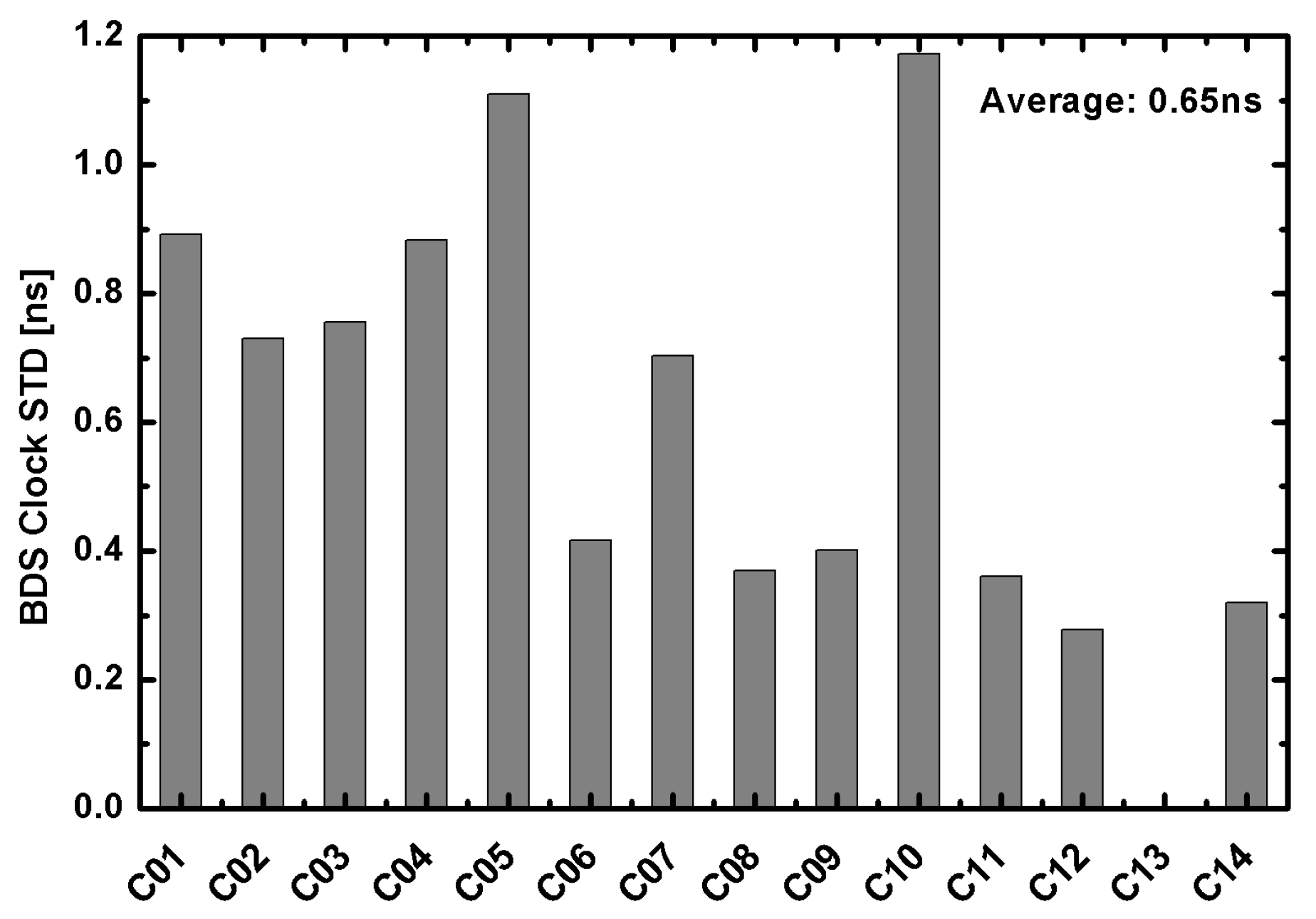
3.2. Real-Time BDS Clock Results
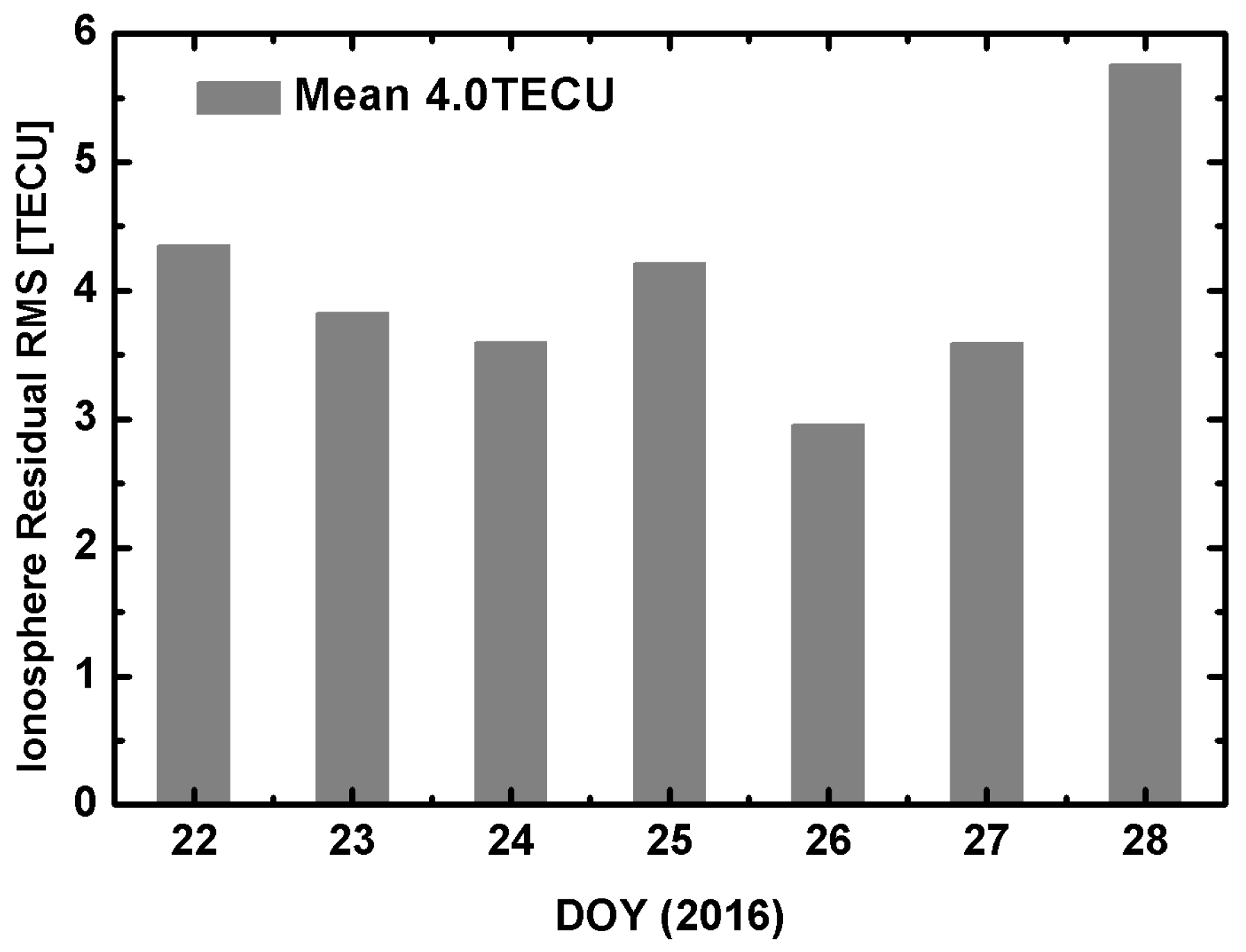
3.3. Ionospheric Correction
4. Real-Time Kinematic PPP Results
4.1. Simulated Kinematic Real-Time PPP
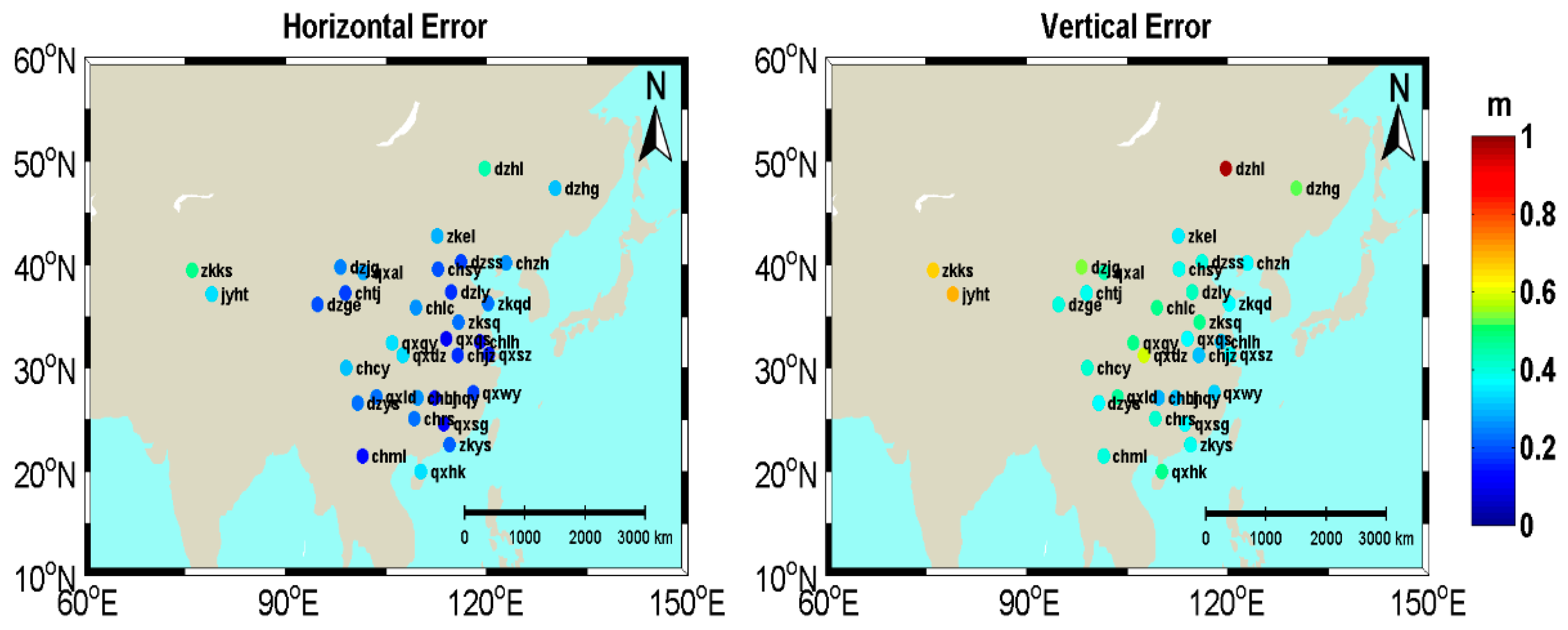
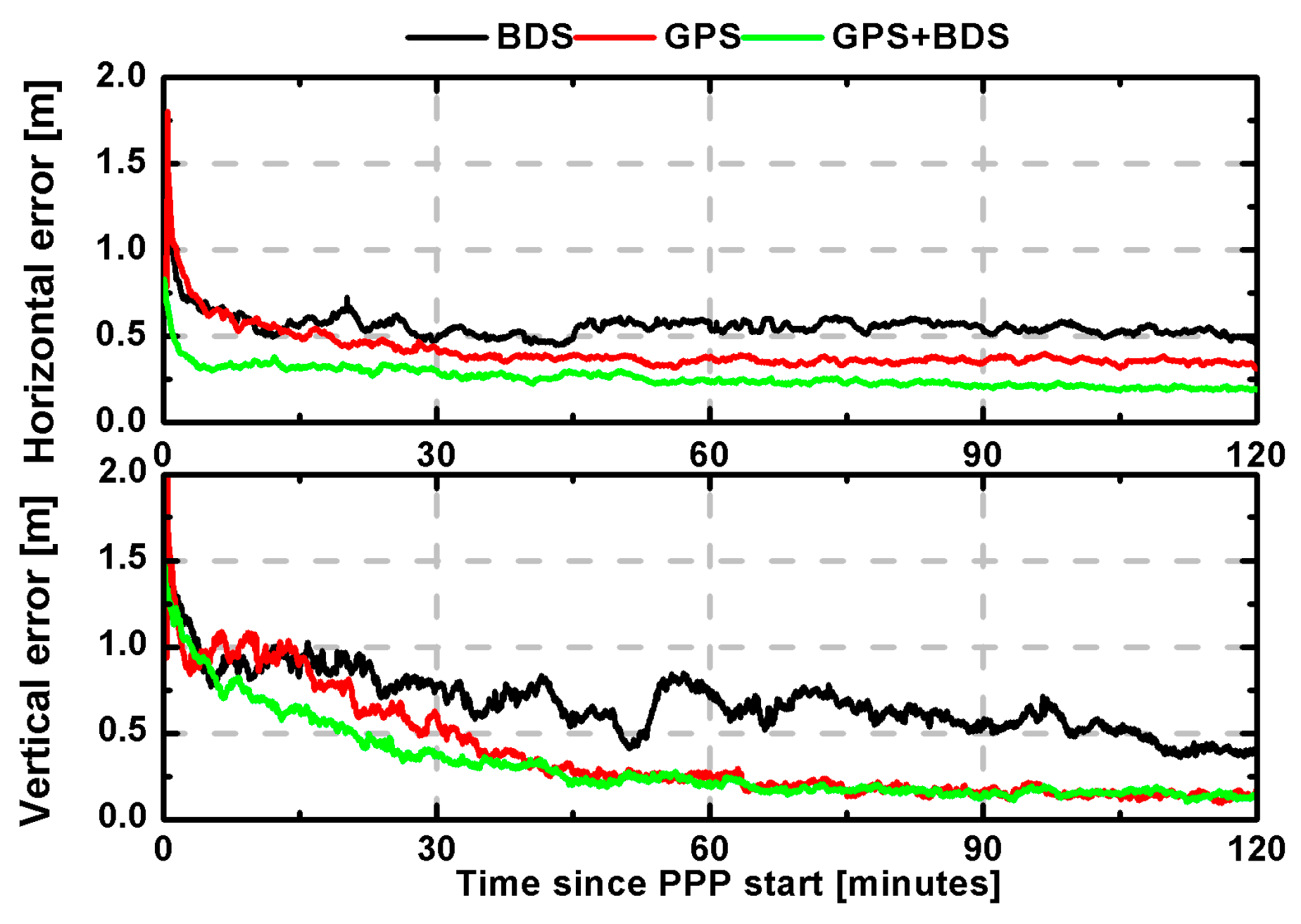
4.1.1. Real-Time Dual-Frequency PPP
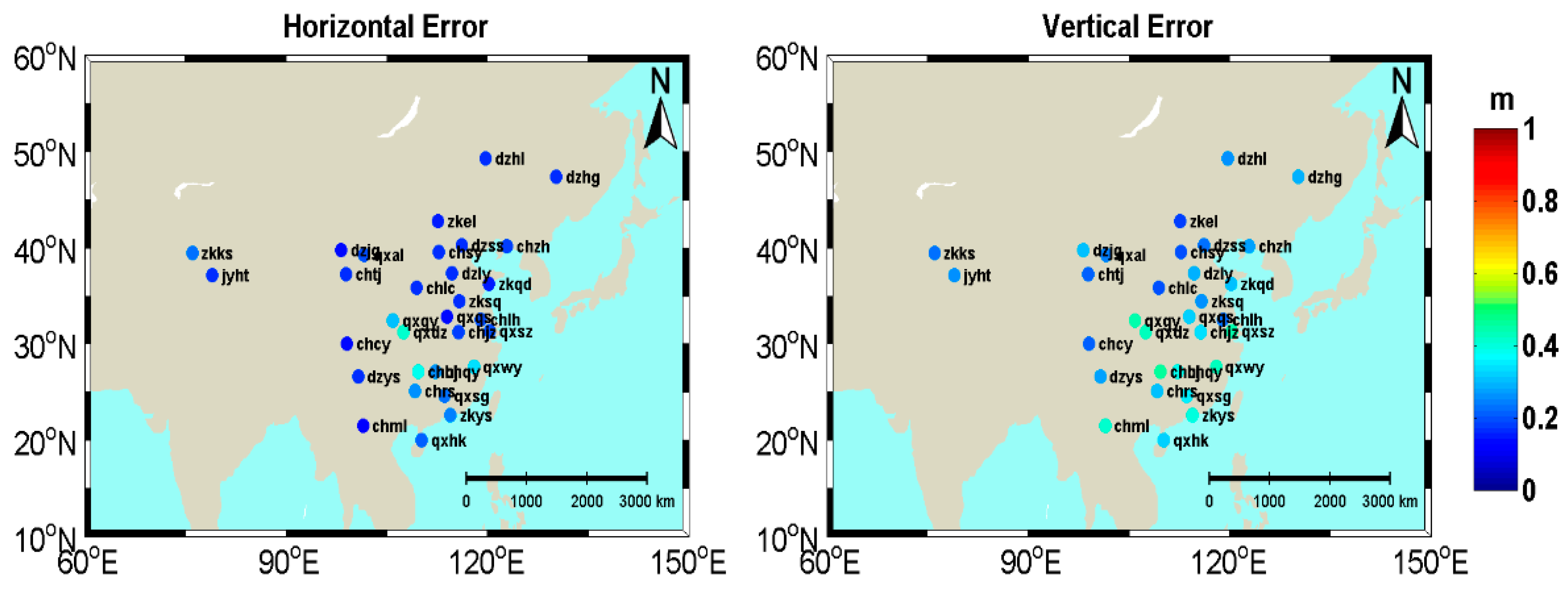
4.1.2. Real-Time Single-Frequency PPP
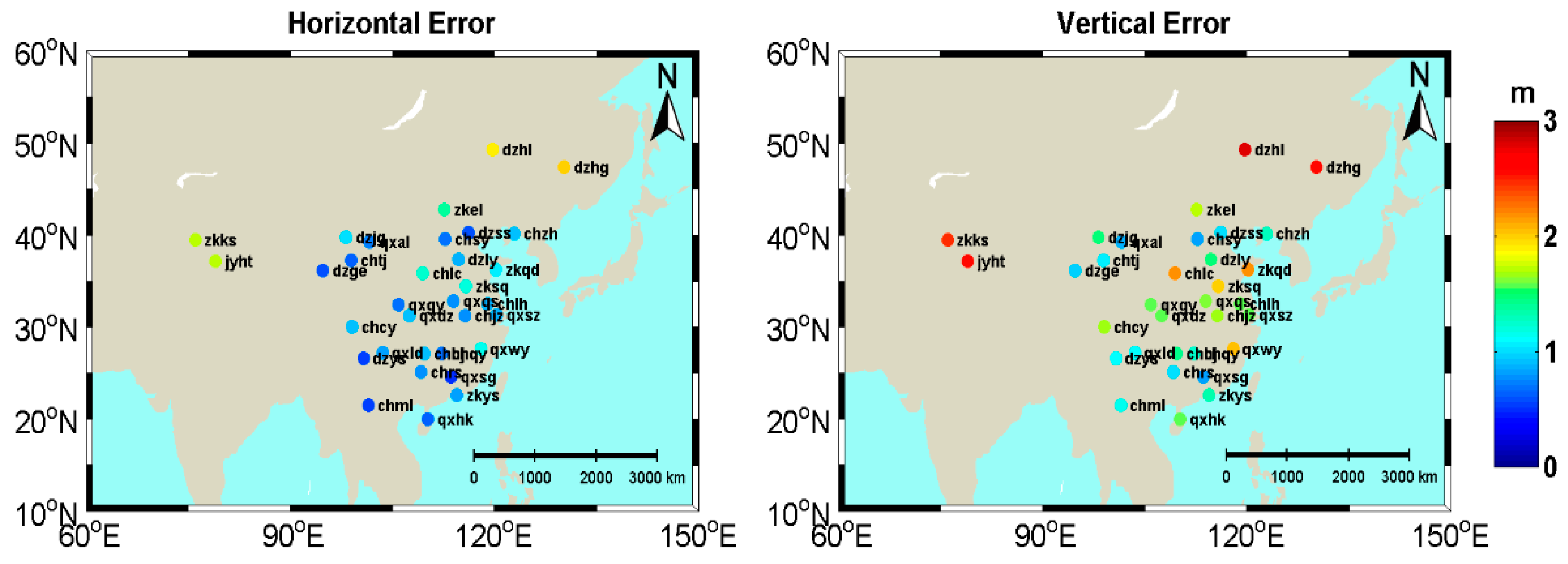
4.2. Shipboard Real-Time Dual-Frequency PPP
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Dow, J.; Neilan, R.; Rizos, C. The international GNSS service in a changing landscape of global navigation satellite systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Caissy, M.; Agrotis, L.; Weber, G.; Hernández-Pajares, M.; Hugentobler, U. The international GNSS real-time service. GPS World 2012, 23, 52–58. [Google Scholar]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef]
- Tao, W. Near Real-Time GPS PPP-Inferred Water Vapor System Development and Evaluation. Master’s Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, 2008. [Google Scholar]
- Ahmed, F.; Clavovic, P.; Teferle, F.N.; Douša, J.; Bingley, R.; Laurichesse, D. Comparative analysis of real-time precise point positioning zenith total delay estimates. GPS Solut. 2016, 20, 187–199. [Google Scholar] [CrossRef]
- Chen, K.; Zamora, N.; Babeyko, A.; Li, X.; Ge, M. Precise positioning of BDS, BDS/GPS: Implications for Tsunami early warning in South China Sea. Remote Sens. 2015, 7, 15955–15968. [Google Scholar] [CrossRef]
- Geng, T.; Xie, X.; Fang, R.; Su, X.; Zhao, Q.; Liu, G.; Li, H.; Shi, C.; Liu, J. Real-time capture of seismic waves using high-rate multi-GNSS observations: Application to the 2015 Mw 7.8 Nepal earthquake. Geophys. Res. Lett. 2016, 43, 161–167. [Google Scholar] [CrossRef]
- Blewitt, G.; Hammond, W.C.; Kreemer, C.; Plag, H.P.; Stein, S.; Okal, E. GPS for real-time earthquake source determination and tsunami warning systems. J. Geod. 2009, 83, 335–343. [Google Scholar] [CrossRef]
- Chen, K.; Gao, Y. Real-time precise point positioning using single frequency data. In Proceedings of the ION GNSS-2005, Long Beach, CA, USA, 13–16 September 2005; pp. 1514–1523. [Google Scholar]
- Shi, C.; Gu, S.; Lou, Y.; Ge, M. An improved approach to model ionospheric delays for single-frequency precise point positioning. Adv. Space Res. 2012, 49, 1698–1708. [Google Scholar] [CrossRef]
- Yunck, T. Orbit determination. In Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Eds.; Chapter 21; Volume 1, AIAA Publ.: Washington, DC, USA, 1996; pp. 559–592. [Google Scholar]
- Muellerschoen, R.; Iijima, B.; Meyer, R.; Bar-Sever, Y.; Accad, E. Real-Time Point Positioning Performance Evaluation of Single-Frequency Receivers Using Nasa’s Global Differential Gps System; Jet Propulsion Laboratory, National Aeronautics and Space Administration: Pasadena, CA, USA, 2004. [Google Scholar]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, 3, 325–331. [Google Scholar] [CrossRef]
- Angrisano, A.; Gaglione, S.; Gioia, C.; Massaro, M.; Robustelli, U. Assessment of NeQuick ionospheric model for Galileo single-frequency users. Acta Geophys. 2013, 61, 1457–1476. [Google Scholar] [CrossRef]
- Wu, X.; Hu, X.; Wang, G.; Zhong, H.; Tang, C. Evaluation of COMPASS ionospheric model in GNSS positioning. Adv. Space Res. 2013, 51, 959–968. [Google Scholar] [CrossRef]
- Hernández-Pajares, M.; Juan, J.M.; Sanz, J.; Orus, R.; Garcia-Rigo, A.; Feltens, J.; Komjathy, A.; Schaer, S.; Krankowski, A. The IGS VTEC maps: A reliable source of ionospheric information since 1998. J. Geod. 2009, 83, 263–275. [Google Scholar] [CrossRef]
- Juan, J.; Rius, A.; Hernández-Pajares, M.; Sanz, J. A two-layer model of the ionosphere using Global Positioning System data. Geophys. Res. Lett. 1997, 24, 393–396. [Google Scholar] [CrossRef]
- Abdelazeem, M.; Çelik, R.N.; Elrabbany, A. An Enhanced Real-Time Regional Ionospheric Model Using IGS Real-Time Service (IGS-RTS) Products. J. Navig. 2016, 69, 521–530. [Google Scholar] [CrossRef]
- Kazmierski, K.; Sosnica, K.; Hadas, T. Quality assessment of multi-GNSS real-time orbits and clocks. In Proceedings of the EGU General Assembly Conference, Vienna, Austria, 23–28 April 2017. [Google Scholar]
- Li, X.; Ge, M.; Zhang, H.; Nischan, T.; Wickert, J. The GFZ real-time GNSS precise positioning service system and its adaption for COMPASS. Adv. Space Res. 2013, 51, 1008–1018. [Google Scholar] [CrossRef]
- Lou, Y.; Zheng, F.; Gu, S.; Wang, C.; Guo, H.; Feng, Y. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut. 2016, 20, 849–862. [Google Scholar] [CrossRef]
- Liu, J.; Ge, M. PANDA software and its preliminary result of positioning and orbit determination. Wuhan Univ. J. Nat. Sci. 2003, 8, 603–609. [Google Scholar]
- Hourly Data from MGEX Stations. Available online: ftp://cddis.nasa.gov (accessed on 10 September 2012).
- Springer, T.; Beutler, G.; Rothacher, M. A new solar radiation pressure model for GPS satellites. GPS Solut. 1999, 2, 50–62. [Google Scholar] [CrossRef]
- Lou, Y.; Liu, Y.; Shi, C.; Yao, X.; Zheng, F. Precise orbit determination of BeiDou constellation based on BETS and MGEX network. Sci. Rep. 2014, 4. [Google Scholar] [CrossRef] [PubMed]
- Dai, X.; Ge, M.; Lou, Y.; Shi, C.; Wickert, J.; Schuh, H. Estimating the yaw-attitude of BDS IGSO and MEO satellites. J. Geod. 2015, 89, 1005–1018. [Google Scholar] [CrossRef]
- Ge, M.; Chen, J.; Douša, J.; Gendt, G.; Wickert, J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. 2012, 16, 9–17. [Google Scholar] [CrossRef]
- Zhang, W.; Lou, Y.; Gu, S.; Shi, C.; Haase, J.S.; Liu, J. Joint estimation of GPS/BDS real-time clocks and initial results. GPS Solut. 2016, 20, 665–676. [Google Scholar] [CrossRef]
- Ratnam, D.; Sarma, A. Modeling of Low-Latitude Ionosphere Using GPS Data with SHF Model. IEEE Trans. Geosci. Remote Sens. 2012, 50, 972–980. [Google Scholar] [CrossRef]
- Zhang, R.; Song, W.; Yao, Y.; Shi, C.; Lou, Y.; Yi, W. Modeling regional ionospheric delay with ground-based BeiDou and GPS observations in China. GPS Solut. 2015, 19, 649–658. [Google Scholar] [CrossRef]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Manuscripta Geodaetica 1993, 18, 91–98. [Google Scholar]
- Lou, Y.; Gong, X.; Gu, S.; Zheng, F.; Feng, Y. Assessment of Code Bias Variations of BDS Triple-frequency Signals and Their Impacts on Ambiguity Resolution for Long Baselines. GPS Solut. 2017, 21, 177–186. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging satellites. In The Use of Artificial Satellites for Geodesy; American Geophysical Union: Washington, DC, USA, 1972; pp. 247–251. [Google Scholar]
- Lagler, K.; Schindelegger, M.; Böhm, J.; Krásná, H.; Nilsson, T. GPT2: Empirical Slant Delay Model for Radio Space Geodetic Techniques. Geophys. Res. Lett. 2013, 40, 1069. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | POD | Clock Estimation |
|---|---|---|
| Estimator | Least squares | Square root information filter |
| Processing sampling | 300 s | 1 s |
| Ambiguity | Fixed for GPS/BDS(IGSO, MEO) separately | Epoch-differenced method |
| Earth rotation parameters | Estimated with tight constraint | Fixed |
| Coordinates | Estimated with tight constraint | Fixed |
| Observables | Un-differenced ionosphere-free combination of code and phase based on GPS L1/L2, BDS B1/B2 | |
| Weighting | Elevation dependent weight ( (p is the observation weight and e is satellite elevation angle) | |
| Cutoff elevation | 7° | |
| Satellite phase center | igs08.atx | |
| Receiver phase center | igs08.atx for GPS, none for BDS | |
| Phase wind-up | Corrected [31] | |
| BDS pseudo-range bias | Corrected [32] | |
| Tropospheric delay | Initial model (Saastamoinen [33] and GPT2 [34]) + random-walk process 10 cm, 5 mm/√(h) | |
| Satellite clock | Estimated as white noise | |
| Receiver clock | Estimated as white noise | |
| Inter-system biases | Estimated as constant parameters with zero mean condition | |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, C.; Zheng, F.; Lou, Y.; Gu, S.; Zhang, W.; Dai, X.; Li, X.; Guo, H.; Gong, X. National BDS Augmentation Service System (NBASS) of China: Progress and Assessment. Remote Sens. 2017, 9, 837. https://doi.org/10.3390/rs9080837
Shi C, Zheng F, Lou Y, Gu S, Zhang W, Dai X, Li X, Guo H, Gong X. National BDS Augmentation Service System (NBASS) of China: Progress and Assessment. Remote Sensing. 2017; 9(8):837. https://doi.org/10.3390/rs9080837
Chicago/Turabian StyleShi, Chuang, Fu Zheng, Yidong Lou, Shengfeng Gu, Weixing Zhang, Xiaolei Dai, Xianjie Li, Hailin Guo, and Xiaopeng Gong. 2017. "National BDS Augmentation Service System (NBASS) of China: Progress and Assessment" Remote Sensing 9, no. 8: 837. https://doi.org/10.3390/rs9080837
APA StyleShi, C., Zheng, F., Lou, Y., Gu, S., Zhang, W., Dai, X., Li, X., Guo, H., & Gong, X. (2017). National BDS Augmentation Service System (NBASS) of China: Progress and Assessment. Remote Sensing, 9(8), 837. https://doi.org/10.3390/rs9080837