
Development of a Rotary Ultrasonic Motor with Double-Sided Staggered Teeth


Abstract
:1. Introduction
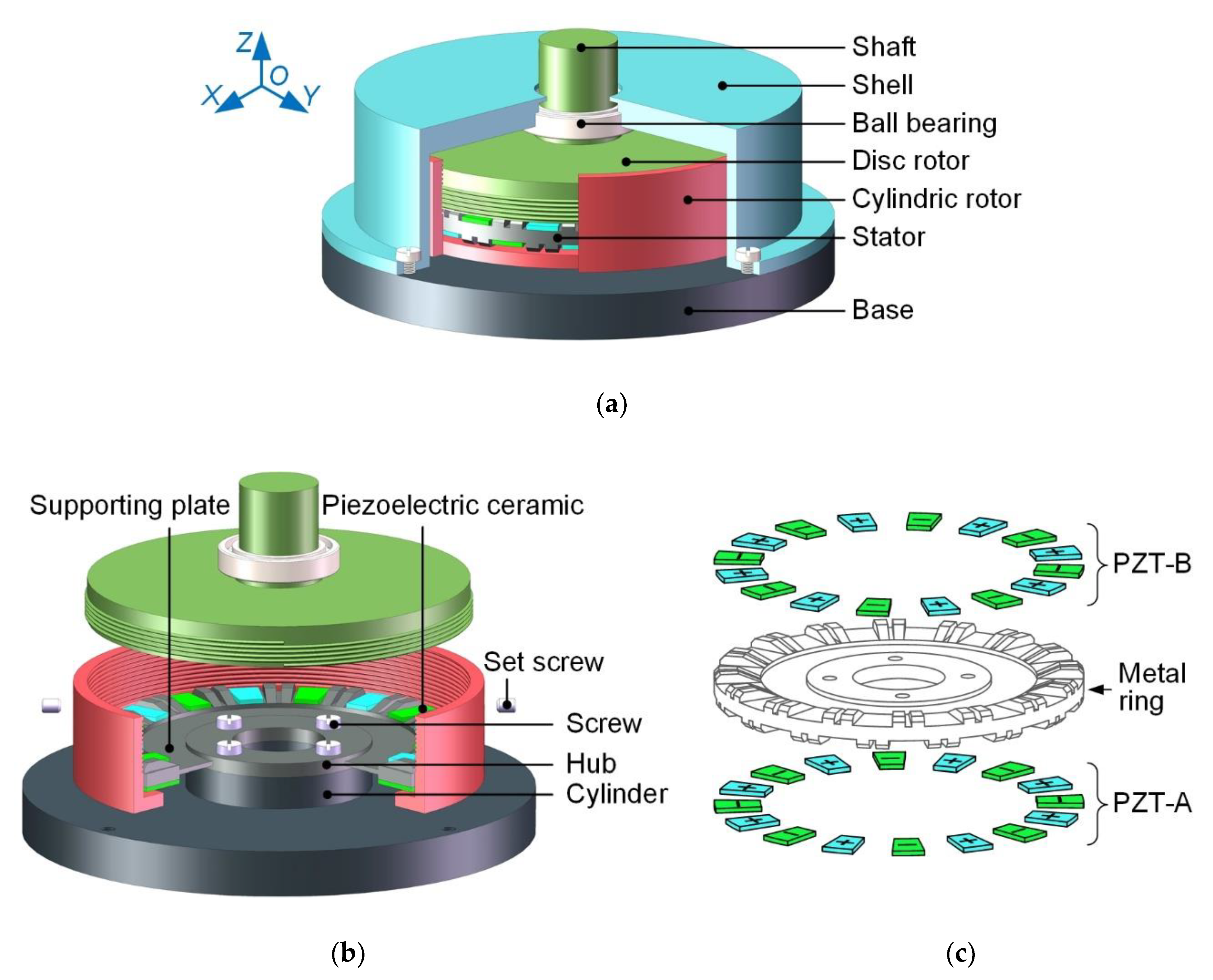
2. Structure of The Motor
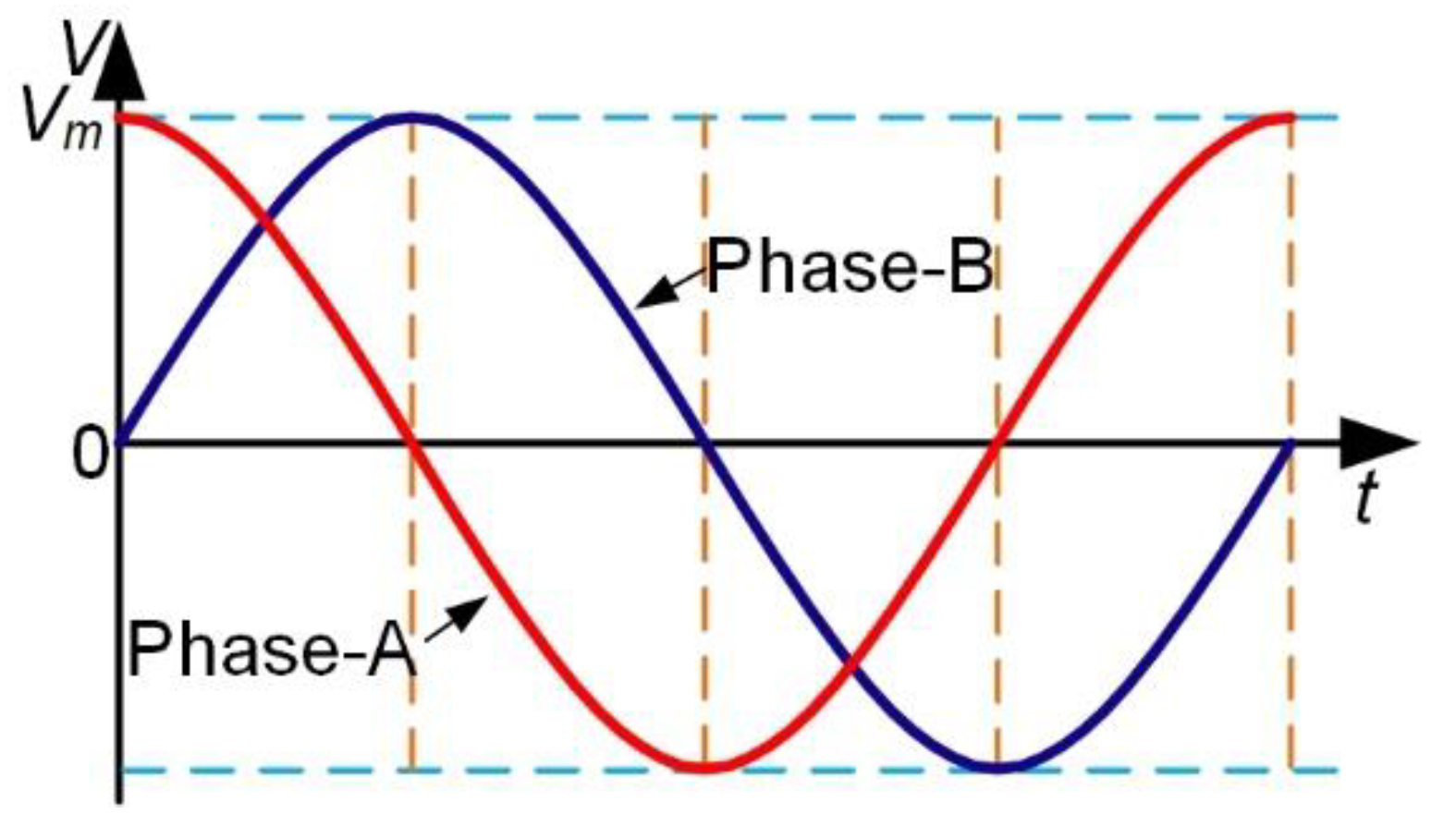
3. Principle of the Stator Vibration
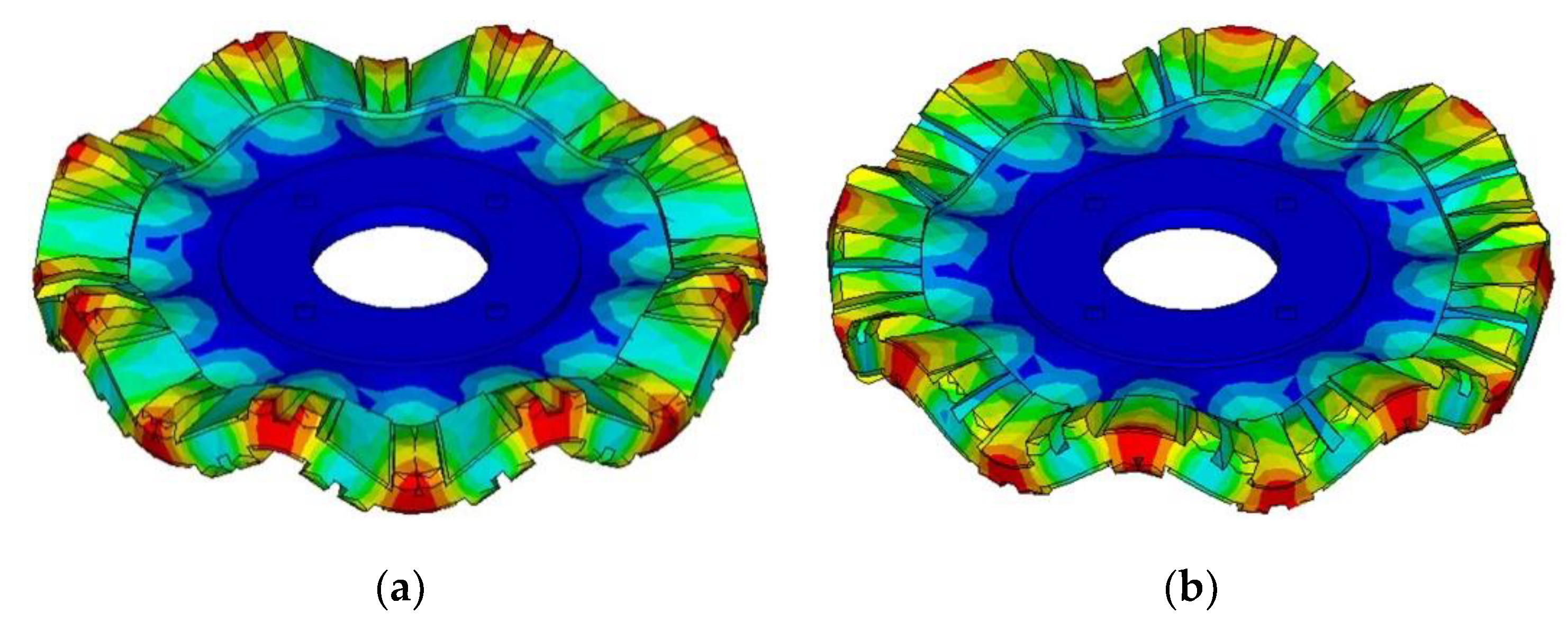
4. Analysis of the Stator
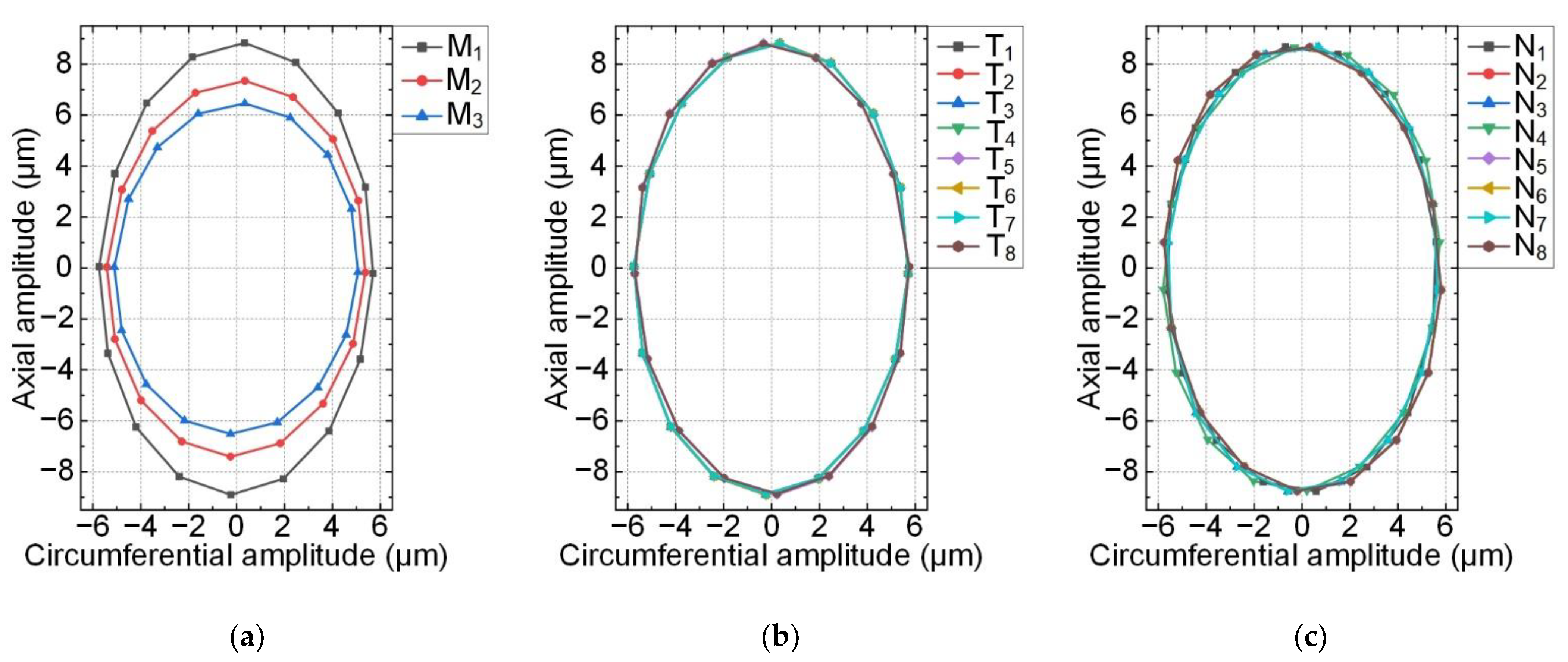
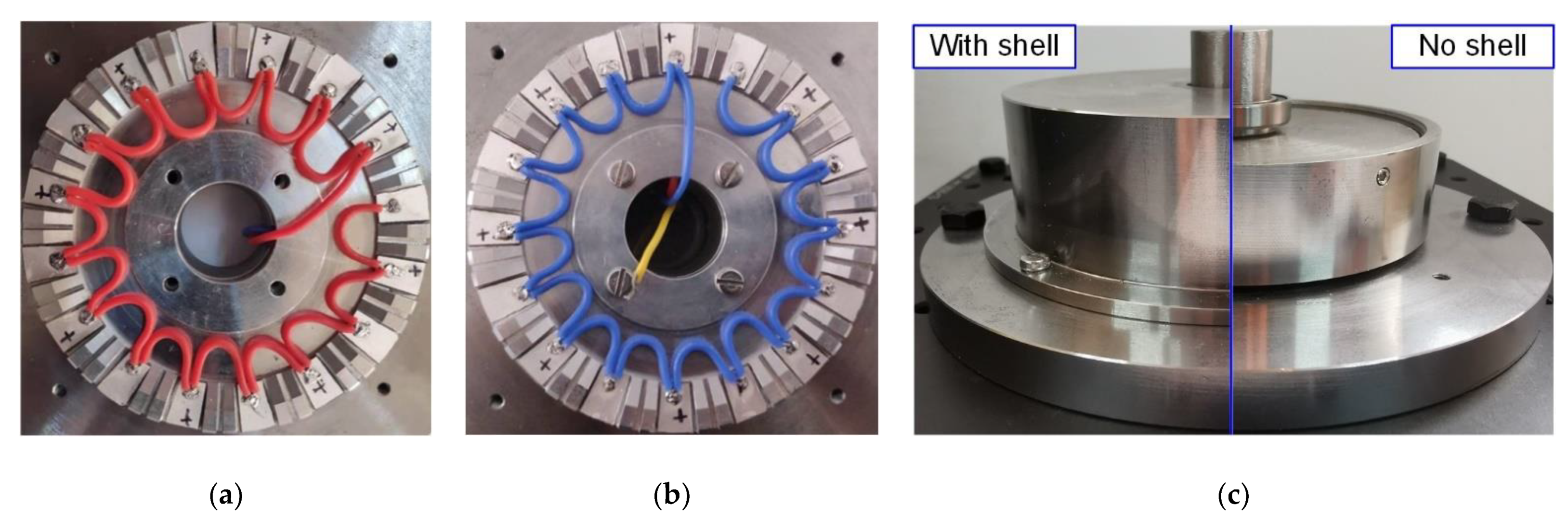
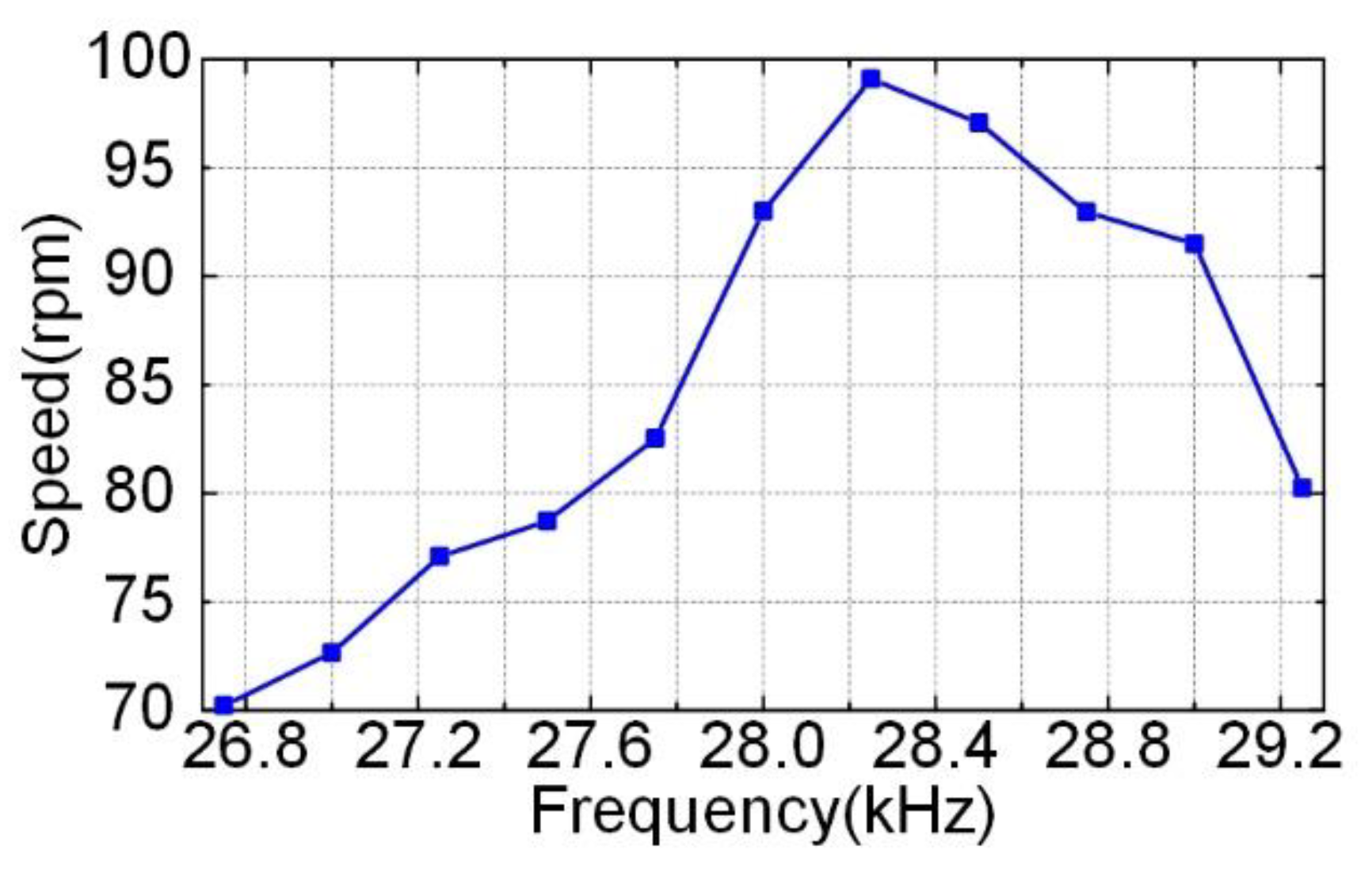
5. Experiments
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Morita, T. Miniature piezoelectric motors. Sens. Actuators A Phys. 2003, 103, 291–300. [Google Scholar] [CrossRef]
- Uchino, K.; Cagatay, S.; Koc, B.; Dong, S.; Bouchilloux, P.; Strauss, M. Micro Piezoelectric Ultrasonic Motors. J. Electroceram. 2004, 13, 393–401. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Liu, Y.; Zhao, L.; Xu, D.; Chen, W.; Deng, J. Design and Experiments of a Single-Foot Linear Piezoelectric Actuator Operated in a Stepping Mode. IEEE Trans. Ind. Electron. 2018, 65, 8063–8071. [Google Scholar] [CrossRef]
- Xu, D.; Liu, Y.; Shi, S.; Liu, J.; Chen, W.; Wang, L. Development of a Nonresonant Piezoelectric Motor With Nanometer Resolution Driving Ability. IEEE/ASME Trans. Mechatron. 2018, 23, 444–451. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Chen, W.; Shi, S. A U-shaped linear ultrasonic motor using longitudinal vibration transducers with double feet. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 981–989. [Google Scholar] [CrossRef]
- Gu, G.-Y.; Zhu, L.-M.; Su, C.-Y.; Ding, H.; Fatikow, S. Proxy-Based Sliding-Mode Tracking Control of Piezoelectric-Actuated Nanopositioning Stages. IEEE/ASME Trans. Mechatron. 2015, 20, 1956–1965. [Google Scholar] [CrossRef]
- Hariri, H.H.; Soh, G.S.; Foong, S.; Wood, K. Locomotion Study of a Standing Wave Driven Piezoelectric Miniature Robot for Bi-Directional Motion. IEEE Trans. Robot. 2017, 33, 742–747. [Google Scholar] [CrossRef]
- Friend, J.; Nakamura, K.; Ueha, S. A Piezoelectric Micromotor Using In-Plane Shearing of PZT Elements. IEEE/ASME Trans. Mechatron. 2004, 9, 467–473. [Google Scholar] [CrossRef]
- Kuo-Tsai, C.; Ouyang, M. Rotary ultrasonic motor driven by a disk-shaped ultrasonic actuator. IEEE Trans. Ind. Electron. 2006, 53, 831–837. [Google Scholar] [CrossRef]
- Deng, J.; Liu, Y.; Liu, J.; Xu, D.; Wang, Y. Development of a Planar Piezoelectric Actuator Using Bending–Bending Hybrid Transducers. IEEE Trans. Ind. Electron. 2019, 66, 6141–6149. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, L.; Gu, Z.; Quan, Q.; Deng, J. Development of a Two-Dimensional Linear Piezoelectric Stepping Platform Using Longitudinal-Bending Hybrid Actuators. IEEE Trans. Ind. Electron. 2019, 66, 3030–3040. [Google Scholar] [CrossRef]
- Li, X.; Yao, Z.; Wu, R. Modeling and analysis of stick-slip motion in a linear piezoelectric ultrasonic motor considering ultrasonic oscillation effect. Int. J. Mech. Sci. 2016, 107, 215–224. [Google Scholar] [CrossRef]
- Park, S.; He, S. Standing wave brass-PZT square tubular ultrasonic motor. Ultrasonics 2012, 52, 880–889. [Google Scholar] [CrossRef]
- He, S.; Chiarot, P.R.; Park, S. A single vibration mode tubular piezoelectric ultrasonic motor. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 1049–1061. [Google Scholar] [CrossRef]
- Bolborici, V.; Dawson, F.P.; Pugh, M.C. A finite volume method and experimental study of a stator of a piezoelectric traveling wave rotary ultrasonic motor. Ultrasonics 2014, 54, 809–820. [Google Scholar] [CrossRef]
- Dong, Z.; Yang, M.; Chen, Z.; Xu, L.; Meng, F.; Ou, W. Design and performance analysis of a rotary traveling wave ultrasonic motor with double vibrators. Ultrasonics 2016, 71, 134–141. [Google Scholar] [CrossRef]
- Wu, J.; Mizuno, Y.; Tabaru, M.; Nakamura, K. Traveling wave ultrasonic motor using polymer-based vibrator. Jpn. J. Appl. Phys. 2016, 55, 018001. [Google Scholar] [CrossRef] [Green Version]
- Yun, C.H.; Watson, B.; Friend, J.; Yeo, L. A piezoelectric ultrasonic linear micromotor using a slotted stator. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2010, 57, 1868–1874. [Google Scholar] [CrossRef] [Green Version]
- Asumi, K.; Fukunaga, R.; Fujimura, T.; Kurosawa, M.K. Miniaturization of a V-Shape Transducer Ultrasonic Motor. Jpn. J. Appl. Phys. 2009, 48, 07gm02. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Yan, J.; Wang, L.; Chen, W. A Two-DOF Ultrasonic Motor Using a Longitudinal–Bending Hybrid Sandwich Transducer. IEEE Trans. Ind. Electron. 2019, 66, 3041–3050. [Google Scholar] [CrossRef]
- Jin, J.; Zhao, C. Characteristic matching between stator and rotor in standing-wave-type ultrasonic motors. J. Electroceram. 2007, 20, 197–202. [Google Scholar] [CrossRef]
- Xing, Z.; He, B.; Xu, K.; Wang, J.; Dong, S. A miniature cylindrical piezoelectric motor with an asymmetric vibrator. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1498–1504. [Google Scholar] [CrossRef]
- Deng, J.; Chen, W.; Li, K.; Wang, L.; Liu, Y. A sandwich piezoelectric actuator with long stroke and nanometer resolution by the hybrid of two actuation modes. Sens. Actuators A Phys. 2019, 296, 121–131. [Google Scholar] [CrossRef]
- Wang, J.; Ho, J.L.; Jiang, Y.B. A self-positioning linear actuator based on a piezoelectric slab with multiple pads. Mech. Syst. Signal Process. 2021, 150, 107245. [Google Scholar] [CrossRef]
- Shao, Y.; Xu, M.; Shao, S.; Song, S. Effective dynamical model for piezoelectric stick–slip actuators in bi-directional motion. Mech. Syst. Signal Process. 2020, 145, 106964. [Google Scholar] [CrossRef]
- Yu, Y.; Gao, Q.; Zhang, X.; Qiao, G.; Han, Y.; Lu, X.; Cheng, T. A piezoelectric stick-slip nanopositioning stage with ultra-high load capacity realizing by decoupling the driving and moving units. IEEE Access 2019, 7, 142806–142813. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Xie, T.; Liu, J. Novel high torque bearingless two-sided rotary ultrasonic motor. J. Zhejiang Univ. Sci. A 2007, 8, 786–792. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Values |
|---|---|
| density (kg/m3) | 7624.8 |
| piezoelectric stress matrix (C/m2) | |
| anisotropic stiffness matrix (1010 N/m2) | |
| relative permittivity matrix |
| L1 | L2 | R | H1 | H2 | H3 | H4 |
|---|---|---|---|---|---|---|
| 10 | 5 | 15 | 3 | 1 | 1 | 2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Zhang, D.; Song, R.; Yang, C.; Mu, Z. Development of a Rotary Ultrasonic Motor with Double-Sided Staggered Teeth. Micromachines 2021, 12, 824. https://doi.org/10.3390/mi12070824
Yang X, Zhang D, Song R, Yang C, Mu Z. Development of a Rotary Ultrasonic Motor with Double-Sided Staggered Teeth. Micromachines. 2021; 12(7):824. https://doi.org/10.3390/mi12070824
Chicago/Turabian StyleYang, Xiaohui, Dongdong Zhang, Rujun Song, Chongqiu Yang, and Zonggao Mu. 2021. "Development of a Rotary Ultrasonic Motor with Double-Sided Staggered Teeth" Micromachines 12, no. 7: 824. https://doi.org/10.3390/mi12070824
APA StyleYang, X., Zhang, D., Song, R., Yang, C., & Mu, Z. (2021). Development of a Rotary Ultrasonic Motor with Double-Sided Staggered Teeth. Micromachines, 12(7), 824. https://doi.org/10.3390/mi12070824