
Temperature Sensing Shape Morphing Antenna (ShMoA)



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle of ShMoA
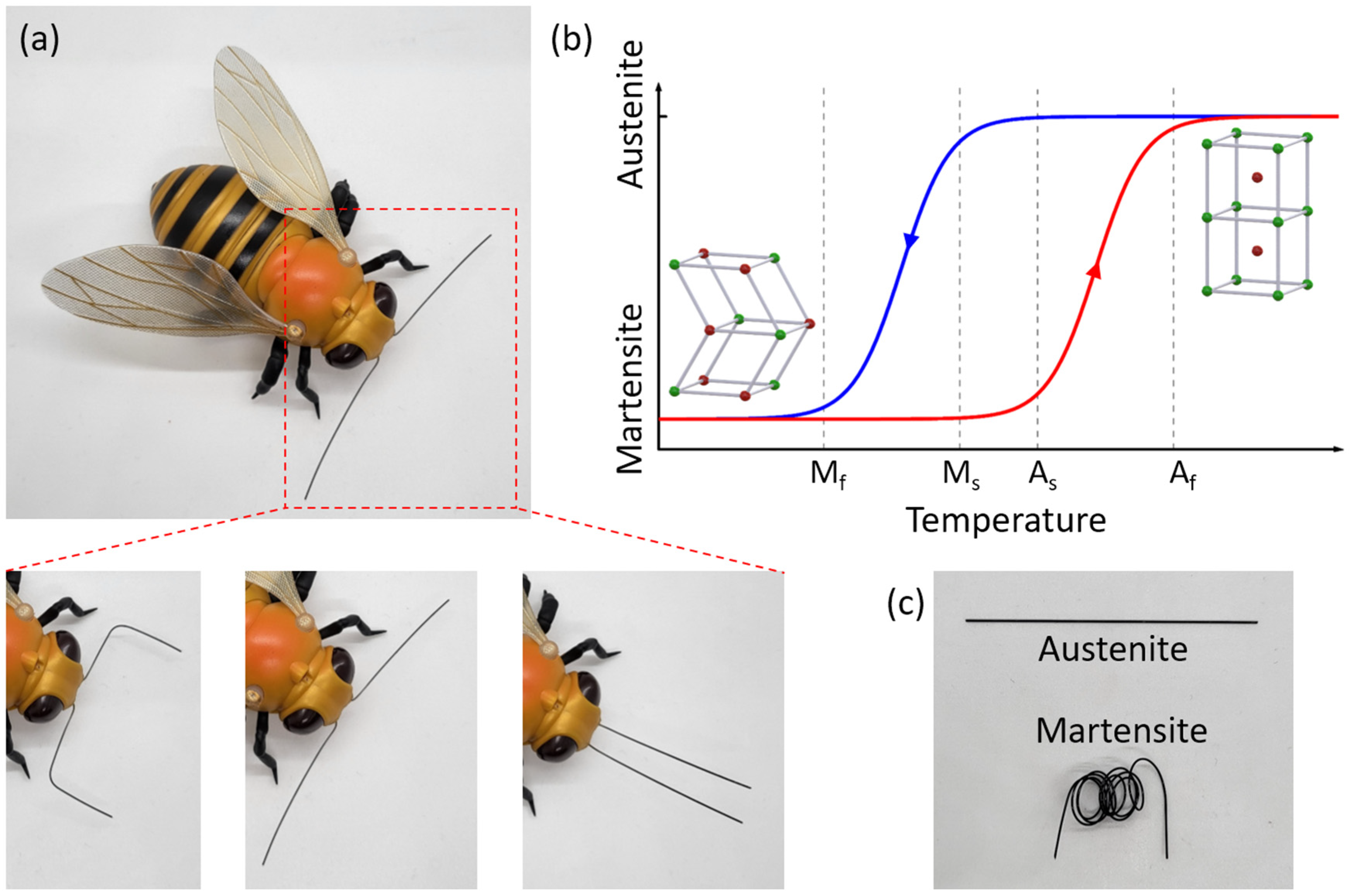
2.1. State Changing of SMA
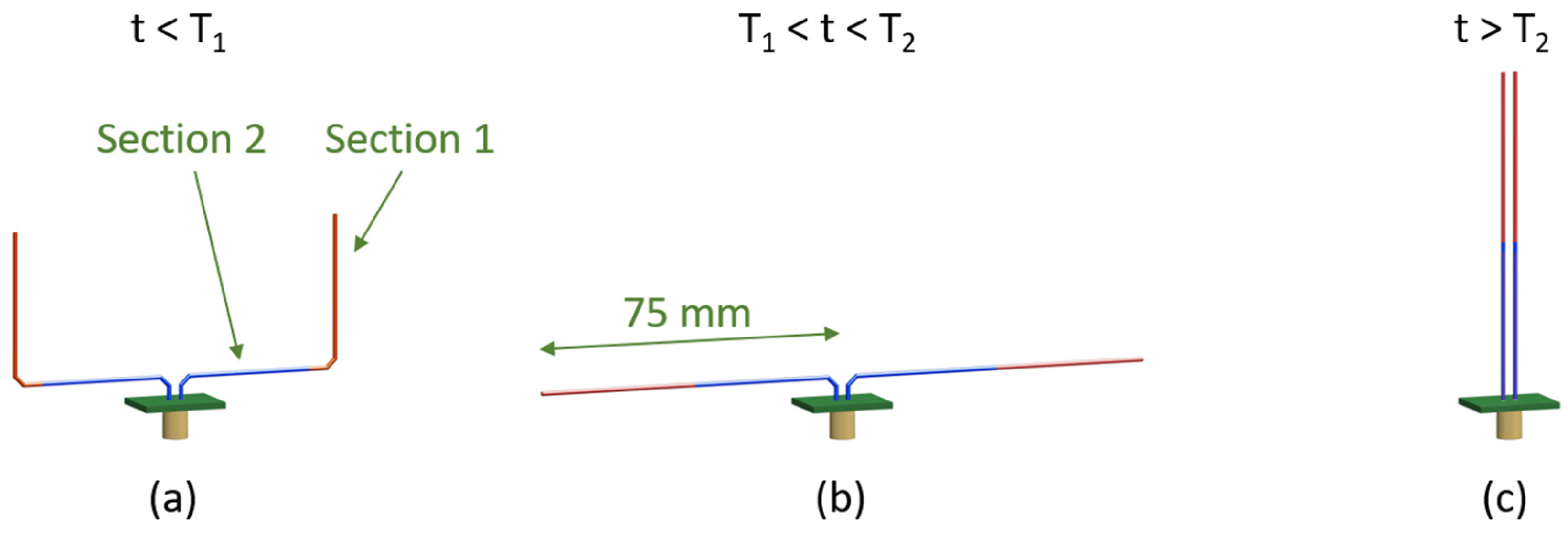
2.2. Working Mechanism of ShMoA
3. ShMoA Fabrication
4. Experiments and Characterization
4.1. Temperature Response of Individual SMA Wires
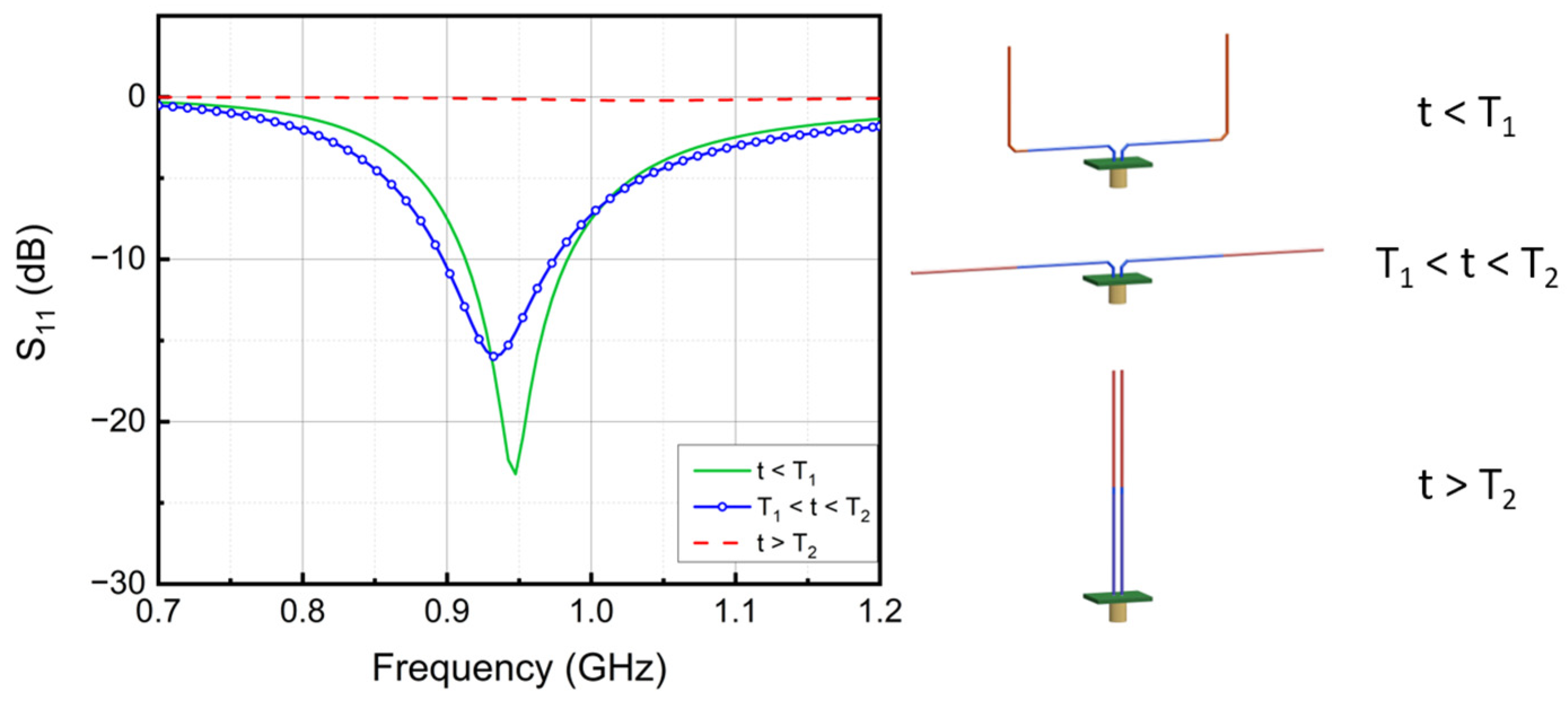
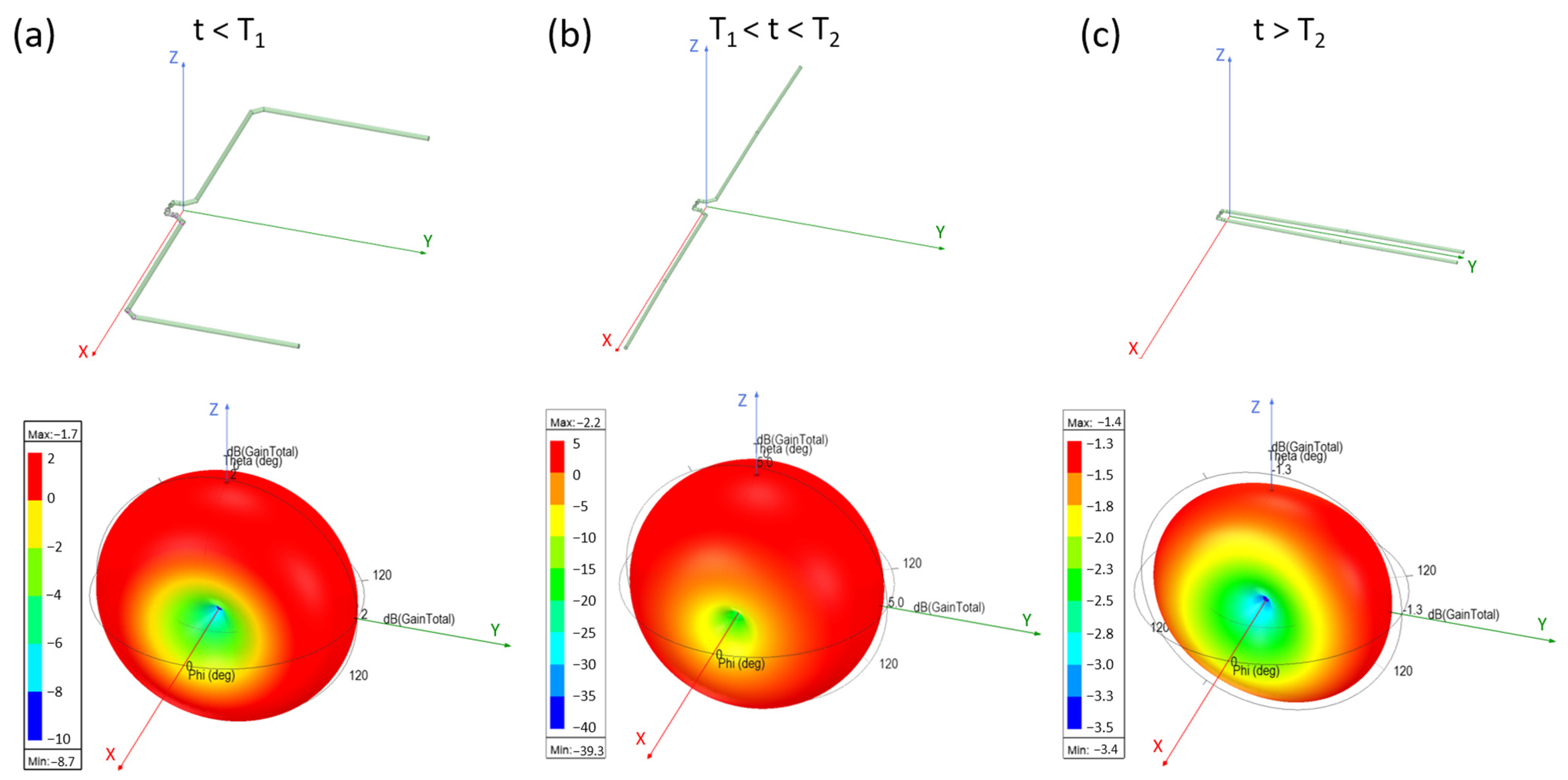
4.2. Frequency Response of ShMoA vs. Temperature
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Iqbal, A.; Smida, A.; Mallat, N.K.; Ghayoula, R.; Elfergani, I.; Rodriguez, J.; Kim, S. Frequency and Pattern Reconfigurable Antenna for Emerging Wireless Communication Systems. Electronics 2019, 8, 407. [Google Scholar] [CrossRef] [Green Version]
- Shah, I.; Hayat, S.; Basir, A.; Zada, M.; Shah, S.; Ullah, S. Design and analysis of a hexa-band frequency reconfigurable antenna for wireless communication. AEU-Int. J. Electron. Commun. 2018, 98, 80–88. [Google Scholar] [CrossRef]
- Qin, P.-Y.; Guo, Y.J.; Cai, Y.; Dutkiewicz, E.; Liang, C.-H. A Reconfigurable Antenna with Frequency and Polarization Agility. IEEE Antennas Wirel. Propag. Lett. 2011, 10, 1373–1376. [Google Scholar] [CrossRef]
- Lim, I.; Lim, S. Monopole-Like and Boresight Pattern Reconfigurable Antenna. IEEE Trans. Antennas Propag. 2013, 61, 5854–5859. [Google Scholar] [CrossRef]
- Awan, W.A.; Hussain, N.; Naqvi, S.A.; Iqbal, A.; Striker, R.; Mitra, D.; Braaten, B.D. A miniaturized wideband and multi-band on-demand reconfigurable antenna for compact and portable devices. AEU-Int. J. Electron. Commun. 2020, 122, 153266. [Google Scholar] [CrossRef]
- Awan, W.; Naqvi, S.; Ali, W.; Hussain, N.; Iqbal, A.; Tran, H.; Alibakhshikenari, M.; Limiti, E. Design and Realization of a Frequency Reconfigurable Antenna with Wide, Dual, and Single-Band Operations for Compact Sized Wireless Applications. Electronics 2021, 10, 1321. [Google Scholar] [CrossRef]
- Jin, G.; Li, M.; Liu, D.; Zeng, G. A Simple Planar Pattern-Reconfigurable Antenna Based on Arc Dipoles. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 1664–1668. [Google Scholar] [CrossRef]
- Wang, L.; Song, W.; Zhang, Y.; Qu, M.; Zhao, Z.; Chen, M.; Yang, Y.; Chen, H.; Fang, D. Active Reconfigurable Tristable Square-Twist Origami. Adv. Funct. Mater. 2020, 30, 1909087. [Google Scholar] [CrossRef]
- Carrara, G.P.; Russo, N.E.; Zekios, C.L.; Georgakopoulos, S.V. A Deployable and Reconfigurable Origami Antenna for Extended Mobile Range. In Proceedings of the 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting—AP-S/URSI 2019, Atlanta, GA, USA, 7–12 July 2019. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, L.; Wang, C. Kresling origami-inspired reconfigurable antenna with spherical cap. Int. J. Mech. Sci. 2022, 227, 107470. [Google Scholar] [CrossRef]
- Lee, S.; Shah, S.I.H.; Lee, H.L.; Lim, S. Frequency-Reconfigurable Antenna Inspired by Origami Flasher. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 1691–1695. [Google Scholar] [CrossRef]
- Shah, S.I.H.; Lim, S. DNA-inspired frequency reconfigurable origami antenna using segmented rotation technique. Smart Mater. Struct. 2020, 30, 015004. [Google Scholar] [CrossRef]
- Liu, X.; Zekios, C.L.; Georgakopoulos, S.V. Analysis of a Packable and Tunable Origami Multi-Radii Helical Antenna. IEEE Access 2019, 7, 13003–13014. [Google Scholar] [CrossRef]
- Yao, S.; Liu, X.; Georgakopoulos, S.V.; Tentzeris, M.M. A novel reconfigurable origami spring antenna. In Proceedings of the 2014 IEEE Antennas and Propagation Society International Symposium (APSURSI), Memphis, TN, USA, 6–11 July 2014; pp. 374–375. [Google Scholar] [CrossRef]
- Zhang, Y.-J.; Wang, L.-C.; Song, W.-L.; Chen, M.; Fang, D. Hexagon-Twist Frequency Reconfigurable Antennas via Multi-Material Printed Thermo-Responsive Origami Structures. Front. Mater. 2020, 7, 600863. [Google Scholar] [CrossRef]
- Wang, W.; Owyeung, R.; Sadeqi, A.; Sonkusale, S. Single Event Recording of Temperature and Tilt Using Liquid Metal with RFID Tags. IEEE Sens. J. 2019, 20, 3249–3256. [Google Scholar] [CrossRef]
- Wang, C.; Yeo, J.C.; Chu, H.; Lim, C.T.; Guo, Y.-X. Design of a Reconfigurable Patch Antenna Using the Movement of Liquid Metal. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 974–977. [Google Scholar] [CrossRef]
- Sun, W. MicroFluID—A Multi-Chip RFID Tag for Interaction Sensing Based on Microfluidic Switches. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2022, 6, 1–23. [Google Scholar]
- AlQurashi, K.Y.; Kelly, J.R.; Wang, Z.; Crean, C.; Mittra, R.; Khalily, M.; Gao, Y. Liquid Metal Bandwidth-Reconfigurable Antenna. IEEE Antennas Wirel. Propag. Lett. 2019, 19, 218–222. [Google Scholar] [CrossRef]
- Rodrigo, D.; Jofre, L.; Cetiner, B.A. Circular Beam-Steering Reconfigurable Antenna with Liquid Metal Parasitics. IEEE Trans. Antennas Propag. 2012, 60, 1796–1802. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Q.; Jia, Y.; Zhu, P. A Frequency- and Polarization-Reconfigurable Slot Antenna Using Liquid Metal. IEEE Trans. Antennas Propag. 2020, 68, 7630–7635. [Google Scholar] [CrossRef]
- Song, L.; Gao, W.; Chui, C.O.; Rahmat-Samii, Y. Wideband Frequency Reconfigurable Patch Antenna With Switchable Slots Based on Liquid Metal and 3-D Printed Microfluidics. IEEE Trans. Antennas Propag. 2019, 67, 2886–2895. [Google Scholar] [CrossRef]
- Su, W.; Nauroze, S.A.; Ryan, B.; Tentzeris, M.M. Novel 3D printed liquid-metal-alloy microfluidics-based zigzag and helical antennas for origami reconfigurable antenna “trees”. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honololu, HI, USA, 4–9 June 2017; pp. 1579–1582. [Google Scholar]
- Nikolaou, S.; Kingsley, N.D.; Ponchak, G.E.; Papapolymerou, J.; Tentzeris, M.M. UWB Elliptical Monopoles with a Reconfigurable Band Notch Using MEMS Switches Actuated without Bias Lines. IEEE Trans. Antennas Propag. 2009, 57, 2242–2251. [Google Scholar] [CrossRef]
- Grau, A.; Romeu, J.; Lee, M.J.; Blanch, S.; Jofre, L.; De Flaviis, F. A dual-linearly-polarized MEMS-reconfigurable antenna for narrowband MIMO communication systems. IEEE Trans. Antennas Propag. 2009, 58, 4–17. [Google Scholar] [CrossRef]
- Wang, W.; Sadeqi, A.; Nejad, H.R.; Sonkusale, S. Cost-effective wireless sensors for detection of package opening and tampering. IEEE Access. 2020, 8, 117122–117132. [Google Scholar] [CrossRef]
- Wang, W.; Sadeqi, A.; Sonkusale, S. All-around Package Security Using Radio Frequency Identification Threads. In Proceedings of the IEEE Sensors, New Delhi, India, 28–31 October 2018. [Google Scholar]
- Song, Z.; Rahmadya, B.; Sun, R.; Takeda, S. An RFID-Based Wireless Vibration and Physical-Shock Sensing System Using Edge Processing. IEEE Sens. J. 2022, 1, 1. [Google Scholar] [CrossRef]
- Rahmadya, B.; Chen, X.; Takeda, S.; Kagoshima, K.; Umehira, M.; Kurosaki, W. Measurement of a UHF RFID-based battery-less vibration frequency sensitive sensor tag using tilt/vibration switches. IEEE Sens. J. 2020, 20, 9901–9909. [Google Scholar] [CrossRef]
- Chen, X.; Feng, D.; Takeda, S.; Kagoshima, K.; Umehira, M. Experimental validation of a new measurement metric for radio-frequency identification-based shock-sensor systems. IEEE J. Radio Freq. Identif. 2018, 2, 206–209. [Google Scholar] [CrossRef]
- Wang, W.; Zeng, W.; Sonkusale, S. Zero-Power Screen Printed Flexible RFID Sensors for Smart Home. 2022; in press. [Google Scholar]
- Asci, C.; Wang, W.; Sonkusale, S. Security Monitoring System Using Magnetically-Activated RFID Tags. In Proceedings of the IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar]
- Wang, W.; Zeng, W.; Weitong, R.; Eric, M.; Sonkusale, S. Thermo-Mechanically Trained Shape Memory Alloy for Temperature Recording with Visual Readout. IEEE Sens. Lett. 2020, 5, 1–4. [Google Scholar] [CrossRef]
- Sumana, L.; Sundarsingh, E.F.; Priyadharshini, S. Shape Memory Alloy-Based Frequency Reconfigurable Ultrawideband Antenna for Cognitive Radio Systems. IEEE Trans. Compon. Packag. Manuf. Technol. 2020, 11, 3–10. [Google Scholar] [CrossRef]
- Wang, W.; Zeng, W.; Sonkusale, S. Battery-Free Shape Memory Alloy Antennas for Detection and Recording of Peak Temperature Activity. Crystals 2022, 12, 86. [Google Scholar] [CrossRef]
- Wang, W.; Asci, C.; Zeng, W.; Owyeung, R.; Sonkusale, S. Shape memory alloy-based helix antenna for temperature sensing. 2022; in press. [Google Scholar]
- Wang, W.; Zeng, W.; Sadeqi, A.; Sonkusale, S. Wireless Temperature Monitoring with Shape Memory Alloy-Based Antenna. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 313–316. [Google Scholar] [CrossRef]
- Zeng, W.; Wang, W.; Sonkusale, S. Broadband Reconfigurable Shape Morphing Bowtie Antenna based on Shape Memory Alloy. 2022; in press. [Google Scholar]
- Zeng, W.; Wang, W.; Sonkusale, S. Multi-band and Radiation Programmable Shape Morphing Antenna. 2022; in press. [Google Scholar]
- Saadat, S.; Salichs, J.; Noori, M.; Hou, Z.; Davoodi, H.; Bar-On, I.; Suzuki, Y.; Masuda, A. An overview of vibration and seismic applications of NiTi shape memory alloy. Smart Mater. Struct. 2002, 11, 218–229. [Google Scholar] [CrossRef]
- Birman, V. Review of Mechanics of Shape Memory Alloy Structures. Appl. Mech. Rev. 1997, 50, 629–645. [Google Scholar] [CrossRef]
- Lee, C.S.; Jeon, J. Phenomenological hysteretic model for superelastic NiTi shape memory alloys accounting for functional degradation. Earthq. Eng. Struct. Dyn. 2021, 51, 277–309. [Google Scholar] [CrossRef]
- Ye, B.; Majumdar, B.; Dutta, I. Texture development and strain hysteresis in a NiTi shape-memory alloy during thermal cycling under load. Acta Mater. 2009, 57, 2403–2417. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Hamid, M.; Hamid, R. Equivalent circuit of dipole antenna of arbitrary length. IEEE Trans. Antennas Propag. 1997, 45, 1695–1696. [Google Scholar] [CrossRef]
- Bouknia, M.L.; Zebiri, C.; Sayad, D.; Elfergani, I.; Alibakhshikenari, M.; Rodriguez, J.; Abd-Alhameed, R.A.; Falcone, F.; Limiti, E. Analysis of the Combinatory Effect of Uniaxial Electrical and Magnetic Anisotropy on the Input Impedance and Mutual Coupling of a Printed Dipole Antenna. IEEE Access 2021, 9, 84910–84921. [Google Scholar] [CrossRef]
- Chu, C.L.; Wu, S.K.; Yen, Y.C. Oxidation behavior of equiatomic TiNi alloy in high temperature air environment. Mater. Sci. Eng. A 1996, 216, 193–200. [Google Scholar] [CrossRef]
- Surbled, P.; Clerc, C.; Le Pioufle, B.; Ataka, M.; Fujita, H. Effect of the composition and thermal annealing on the transformation temperatures of sputtered TiNi shape memory alloy thin films. Thin Solid 2001, 401, 52–59. [Google Scholar] [CrossRef]
- Buenconsejo, P.J.S.; Zarnetta, R.; König, D.; Savan, A.; Thienhaus, S.; Ludwig, A. A New Prototype Two-Phase (TiNi)–(β-W) SMA System with Tailorable Thermal Hysteresis. Adv. Funct. Mater. 2011, 21, 113–118. [Google Scholar] [CrossRef]
- Jiang, J.; Cui, L.; Zheng, Y.; Jiang, D.; Liu, Z.; Zhao, K. Narrow hysteresis behavior of TiNi shape memory alloy constrained by NbTi matrix during incomplete transformation. Mater. Sci. Eng. A 2012, 536, 33–36. [Google Scholar] [CrossRef]
- Mihálcz, I. Fundamental characteristics and design method for nickel-titanium shape memory alloy. Period. Polytech. Mech. 2001, 45, 75–86. [Google Scholar]
- Zhao, X.; Yan, X.; Yang, Y.; Xu, H. Wide hysteresis NiTi(Nb) shape memory alloys with low Nb content (4.5at.%). Mater. Sci. Eng. A 2006, 438–440, 575–578. [Google Scholar] [CrossRef]
- Cui, J.; Chu, Y.S.; Famodu, O.O.; Furuya, Y.; Hattrick-Simpers, J.; James, R.D.; Ludwig, A.; Thienhaus, S.; Wuttig, M.; Zhang, Z.Y.; et al. Combinatorial search of thermoelastic shape-memory alloys with extremely small hysteresis width. Nat. Mater. 2006, 5, 286–290. [Google Scholar] [CrossRef]
- Kahn, H.; A Huff, M.; Heuer, A.H. The TiNi shape-memory alloy and its applications for MEMS. J. Micromech. Microeng. 1998, 8, 213–221. [Google Scholar] [CrossRef]
- Stachiv, I.; Alarcon, E.; Lamac, M. Shape Memory Alloys and Polymers for MEMS/NEMS Applications: Review on Recent Findings and Challenges in Design, Preparation, and Characterization. Metals 2021, 11, 415. [Google Scholar] [CrossRef]
- Lago, H.; Zakaria, Z.; Jamlos, M.F.; Soh, P.J. A wideband reconfigurable folded planar dipole using MEMS and hybrid polymeric substrates. AEU-Int. J. Electron. Commun. 2018, 99, 347–353. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, W.; Wang, W.; Sonkusale, S. Temperature Sensing Shape Morphing Antenna (ShMoA). Micromachines 2022, 13, 1673. https://doi.org/10.3390/mi13101673
Zeng W, Wang W, Sonkusale S. Temperature Sensing Shape Morphing Antenna (ShMoA). Micromachines. 2022; 13(10):1673. https://doi.org/10.3390/mi13101673
Chicago/Turabian StyleZeng, Wenxin, Wei Wang, and Sameer Sonkusale. 2022. "Temperature Sensing Shape Morphing Antenna (ShMoA)" Micromachines 13, no. 10: 1673. https://doi.org/10.3390/mi13101673
APA StyleZeng, W., Wang, W., & Sonkusale, S. (2022). Temperature Sensing Shape Morphing Antenna (ShMoA). Micromachines, 13(10), 1673. https://doi.org/10.3390/mi13101673