
From Microtiter Plates to Droplets—There and Back Again †


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
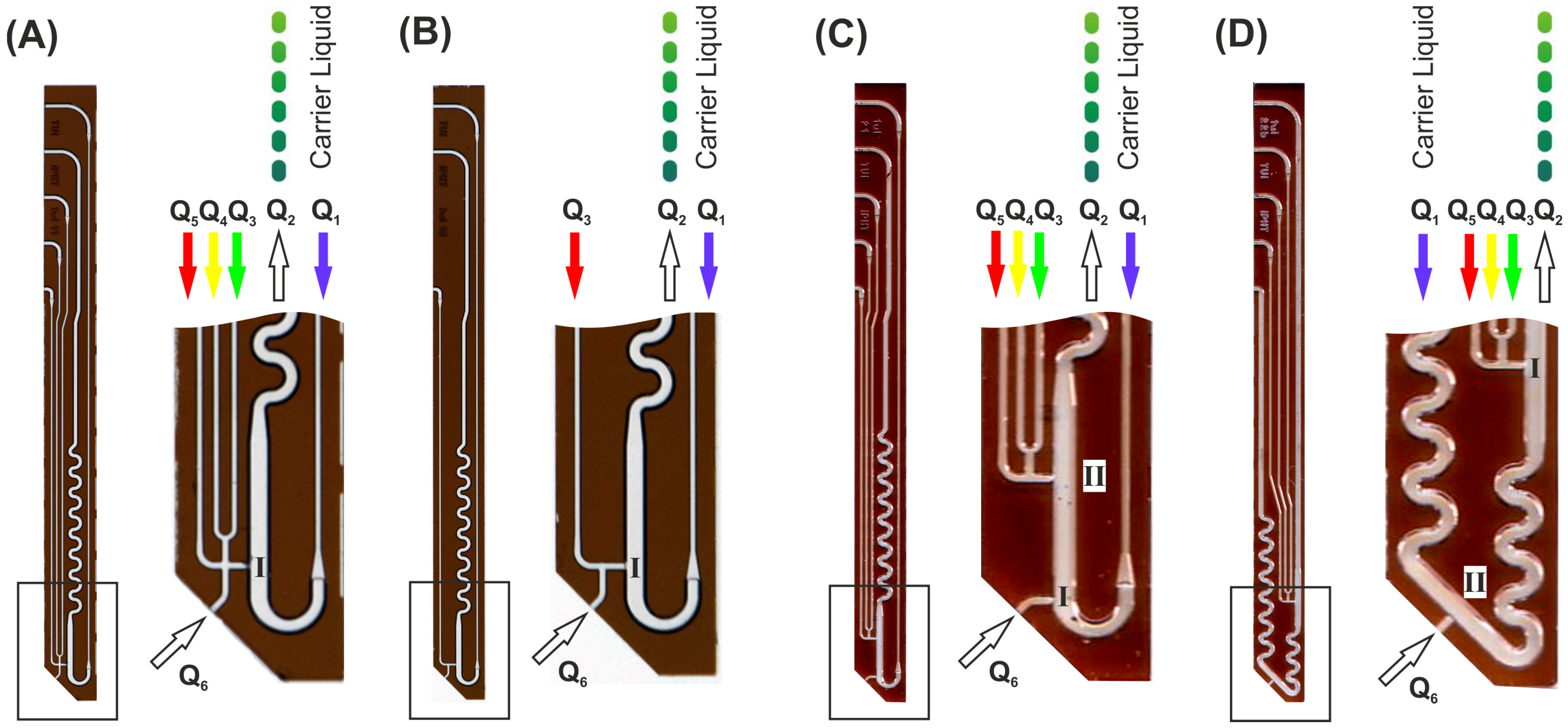
2. The Digital Microfluidic Pipette Tips (DMPTs)
2.1. Device Layout
2.2. Device Function and Variants for Different Assay Requirements
2.3. Surface Functionalization and Operation
3. DMPT-Fluid Connector and Robotic Workflow
3.1. Fluid Connector for the DMPTs and Other Fluidic Devices
3.2. Periphery and Workflow for the Digital Microfluidic Pipetting Tips
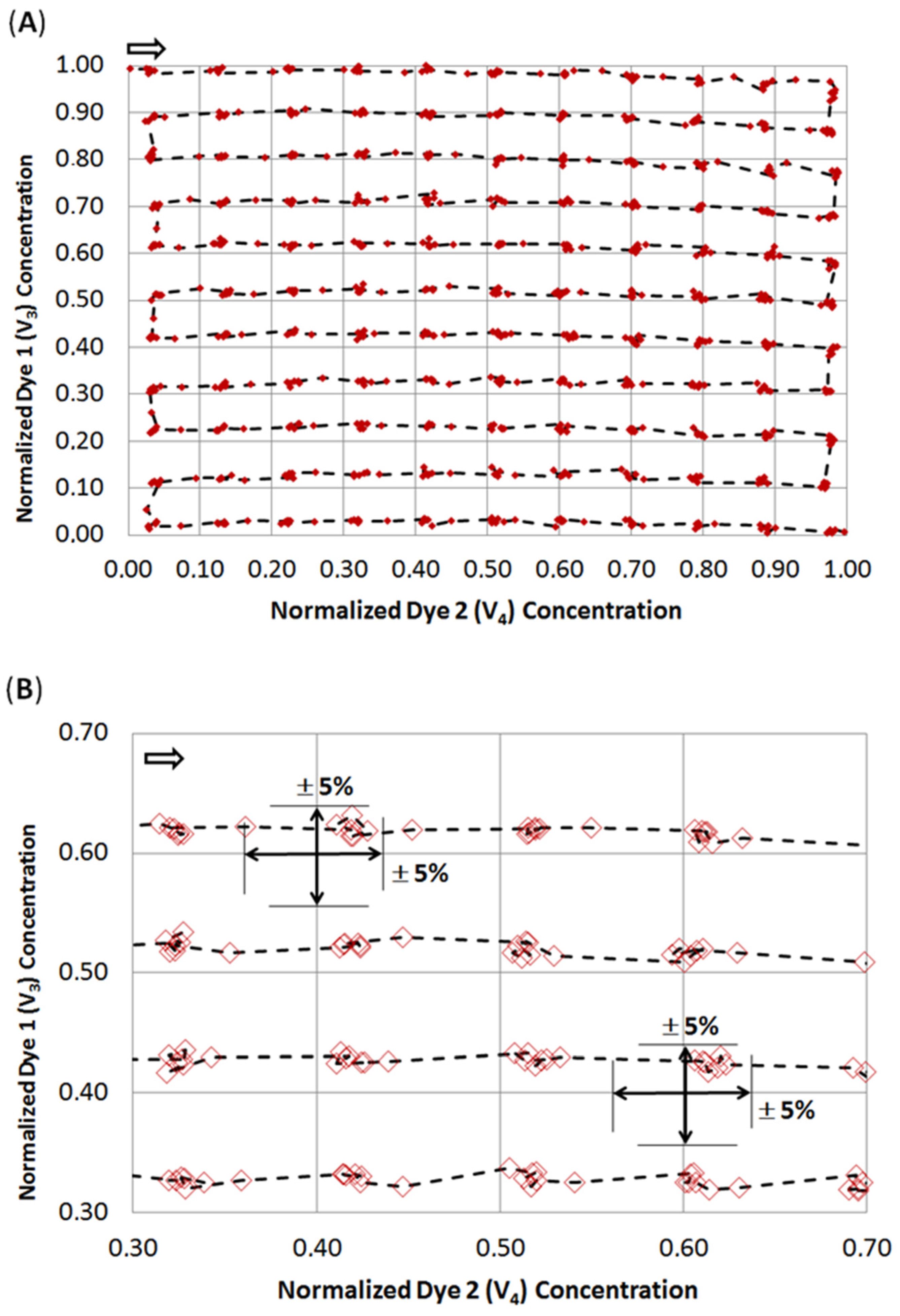
4. Characterization of the DMPT
5. Droplet to Vial Transfer
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Postek, W.; Garstecki, P. Droplet Microfluidics for High-Throughput Analysis of Antibiotic Susceptibility in Bacterial Cells and Populations. Acc. Chem. Res. 2022, 55, 605–615. [Google Scholar] [CrossRef] [PubMed]
- Vitorino, R.; Guedes, S.; da Costa, J.P.; Kasicka, V. Microfluidics for Peptidomics, Proteomics, and Cell Analysis. Nanomaterials 2021, 11, 1118. [Google Scholar] [CrossRef] [PubMed]
- Eduati, F.; Utharala, R.; Madhavan, D.; Neumann, U.P.; Longerich, T.; Cramer, T.; Saez-Rodriguez, J.; Merten, C.A. A microfluidics platform for combinatorial drug screening on cancer biopsies. Nat. Commun. 2018, 9, 2434. [Google Scholar] [CrossRef] [Green Version]
- Sesen, M.; Alan, T.; Neild, A. Droplet control technologies for microfluidic high throughput screening (mu HTS). Lab Chip 2017, 17, 2372–2394. [Google Scholar] [CrossRef] [Green Version]
- Kaminski, T.S.; Scheler, O.; Garstecki, P. Droplet microfluidics for microbiology: Techniques, applications and challenges. Lab Chip 2016, 16, 2168–2187. [Google Scholar] [CrossRef] [Green Version]
- Miller, O.J.; El Harrak, A.; Mangeat, T.; Baret, J.-C.; Frenz, L.; El Debs, B.; Mayot, E.; Samuels, M.L.; Rooney, E.K.; Dieu, P.; et al. High-resolution dose-response screening using droplet-based microfluidics. Proc. Natl. Acad. Sci. USA 2012, 109, 378–383. [Google Scholar] [CrossRef] [Green Version]
- Joensson, H.N.; Svahn, H.A. Droplet Microfluidics—A Tool for Single-Cell Analysis. Angew. Chem.-Int. Ed. 2012, 51, 12176–12192. [Google Scholar] [CrossRef]
- Beneyton, T.; Wijaya, I.P.M.; Postros, P.; Najah, M.; Leblond, P.; Couvent, A.; Mayot, E.; Griffiths, A.D.; Drevelle, A. High-throughput screening of filamentous fungi using nanoliter-range droplet-based microfluidics. Sci. Rep. 2016, 6, 27223. [Google Scholar] [CrossRef]
- Sjostrom, S.L.; Bai, Y.P.; Huang, M.T.; Liu, Z.H.; Nielsen, J.; Joensson, H.N.; Svahn, H.A. High-throughput screening for industrial enzyme production hosts by droplet microfluidics. Lab Chip 2014, 14, 806–813. [Google Scholar] [CrossRef] [Green Version]
- Rosenfeld, L.; Lin, T.; Derda, R.; Tang, S.K.Y. Review and analysis of performance metrics of droplet microfluidics systems. Microfluid. Nanofluid. 2014, 16, 921–939. [Google Scholar] [CrossRef]
- Teh, S.Y.; Lin, R.; Hung, L.H.; Lee, A.P. Droplet microfluidics. Lab Chip 2008, 8, 198–220. [Google Scholar] [CrossRef] [PubMed]
- Clausell-Tormos, J.; Lieber, D.; Baret, J.C.; El-Harrak, A.; Miller, O.J.; Frenz, L.; Blouwolff, J.; Humphry, K.J.; Koster, S.; Duan, H.; et al. Droplet-based microfluidic platforms for the encapsulation and screening of mammalian cells and multicellular organisms. Chem. Biol. 2008, 15, 427–437. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tice, J.D.; Song, H.; Lyon, A.D.; Ismagilov, R.F. Formation of Droplets and Mixing in Multiphase Microfluidics at Low Values of the Reynolds and the Capillary Numbers. Langmuir 2003, 19, 9127–9133. [Google Scholar] [CrossRef]
- Cao, J.L.; Richter, F.; Kastl, M.; Erdmann, J.; Burgold, C.; Dittrich, D.; Schneider, S.; Köhler, J.M.; Gross, G.A. Droplet-Based Screening for the Investigation of Microbial Nonlinear Dose-Response Characteristics System, Background and Examples. Micromachines 2020, 11, 577. [Google Scholar] [CrossRef]
- Köhler, J.M.; Henkel, T.; Grodrian, A.; Kirner, T.; Roth, M.; Martin, K.; Metze, J. Digital reaction technology by micro segmented flow—Components, concepts and applications. Chem. Eng. J. 2004, 101, 201–216. [Google Scholar] [CrossRef]
- Kauser, A.; Schneider, S.; Möller, F.; Csaki, A.; Fritzsche, W.; Köhler, J.M. Screening of plasmonic properties of composed metal nanoparticles by combinatorial synthesis in micro-fluid segment sequences. Chem. Eng. J. 2013, 227, 80–89. [Google Scholar] [CrossRef]
- Boedicker, J.Q.; Li, L.; Kline, T.R.; Ismagilov, R.F. Detecting bacteria and determining their susceptibility to antibiotics by stochastic confinement in nanoliter droplets using plug-based microfluidics. Lab Chip 2008, 8, 1265–1272. [Google Scholar] [CrossRef] [Green Version]
- Martin, K.; Henkel, T.; Baier, V.; Grodrian, A.; Schön, T.; Roth, M.; Köhler, J.M.; Metze, J. Generation of larger numbers of separated microbial populations by cultivation in segmented-flow microdevices. Lab Chip 2003, 3, 202–207. [Google Scholar] [CrossRef]
- Cao, J.L.; Köhler, J.M. Droplet-based microfluidics for microtoxicological studies. Eng. Life Sci. 2015, 15, 306–317. [Google Scholar] [CrossRef]
- Kürsten, D.; Cao, J.L.; Funfak, A.; Müller, P.; Köhler, J.M. Cultivation of Chlorella vulgaris in microfluid segments and microtoxicological determination of their sensitivity against CuCl2 in the nanoliter range. Eng. Life Sci. 2011, 11, 580–587. [Google Scholar] [CrossRef]
- Kürsten, D.; Möller, F.; Groß, G.A.; Lenk, C.; Visaveliya, N.; Schuler, T.; Köhler, J.M. Identification of response classes from heavy metal-tolerant soil microbial communities by highly resolved concentration-dependent screenings in a microfluidic system. Methods Ecol. Evol. 2015, 6, 600–609. [Google Scholar] [CrossRef]
- Park, J.; Kerner, A.; Burns, M.A.; Lin, X.X.N. Microdroplet-Enabled Highly Parallel Co-Cultivation of Microbial Communities. PLoS ONE 2011, 6, e17019. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gross, G.A.; Hamann, C.; Guenther, M.; Koehler, J.M. Formation of polymer and nanoparticle doped polymer minirods by use of the microsegmented flow principle. Chem. Eng. Technol. 2007, 30, 341–346. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Z.Y.; New, D.; Zagnoni, M. Microdroplet Operations in Polymeric Microtubes. Anal. Chem. 2021, 93, 2411–2418. [Google Scholar] [CrossRef]
- Kuster, S.K.; Fagerer, S.R.; Verboket, P.E.; Eyer, K.; Jefimovs, K.; Zenobi, R.; Dittrich, P.S. Interfacing Droplet Microfluidics with Matrix-Assisted Laser Desorption/lonization Mass Spectrometry: Label-Free Content Analysis of Single Droplets. Anal. Chem. 2013, 85, 1285–1289. [Google Scholar] [CrossRef] [PubMed]
- Gielen, F.; van Vliet, L.; Koprowski, B.T.; Devenish, S.R.A.; Fischlechner, M.; Edel, J.B.; Niu, X.Z.; de Mello, A.J.; Hollfelder, F. A Fully Unsupervised Compartment-on-Demand Platform for Precise Nanoliter Assays of Time-Dependent Steady-State Enzyme Kinetics and Inhibition. Anal. Chem. 2013, 85, 4761–4769. [Google Scholar] [CrossRef]
- Wu, J.B.; Zhang, M.Y.; Li, X.L.; Wen, W.J. Multiple and High-Throughput Droplet Reactions via Combination of Microsampling Technique and Microfluidic Chip. Anal. Chem. 2012, 84, 9689–9693. [Google Scholar] [CrossRef]
- Clausell-Tormos, J.; Griffiths, A.D.; Merten, C.A. An automated two-phase microfluidic system for kinetic analyses and the screening of compound libraries. Lab Chip 2010, 10, 1302–1307. [Google Scholar] [CrossRef]
- Schumacher, J.T.; Grodrian, A.; Lemke, K.; Römer, R.; Metze, J. System development for generating homogeneous cell suspensions and transporting them in microfluidic devices. Eng. Life Sci. 2008, 8, 49–55. [Google Scholar] [CrossRef]
- Cao, J.L.; Schneider, S.; Schultheiss, R.; Schober, A.; Köhler, J.M.; Gross, G.A. “From microtiter plates to droplets” tools for micro-fluidic droplet processing. Microsyst. Technol. 2015, 21, 539–548. [Google Scholar] [CrossRef]
- Rho, H.S.; Yang, Y.; Terstappen, L.W.M.M.; Gardeniers, H.; Le Gac, S.; Habibović, P. Programmable droplet-based microfluidic serial dilutor. J. Ind. Eng. Chem. 2020, 91, 231–239. [Google Scholar] [CrossRef]
- Korczyk, P.M.; Derzsi, L.; Jakiela, S.; Garstecki, P. Microfluidic traps for hard-wired operations on droplets. Lab Chip 2013, 13, 4096–4102. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Niu, X.Z.; Gielen, F.; Edel, J.B.; de Mello, A.J. A microdroplet dilutor for high-throughput screening. Nat. Chem. 2011, 3, 437–442. [Google Scholar] [CrossRef] [PubMed]
- Glass, N.R.; Tjeung, R.; Chan, P.; Yeo, L.Y.; Friend, J.R. Organosilane deposition for microfluidic applications. Biomicrofluidics 2011, 5, 036501. [Google Scholar] [CrossRef] [Green Version]
- Breisch, S.; de Heij, B.; Lohr, M.; Stezle, M. Selective chemical surface modification of fluidic microsystems and characterization studies. J. Micromech. Microeng. 2004, 14, 497–505. [Google Scholar] [CrossRef]
- Belder, D.; Ludwig, M. Surface modification in microchip electrophoresis. Electrophoresis 2003, 24, 3595–3606. [Google Scholar] [CrossRef]
- Wang, J.J.; Wang, J.A.; Feng, L.F.; Lin, T. Fluid mixing in droplet-based microfluidics with a serpentine microchannel. RSC Adv. 2015, 5, 104138–104144. [Google Scholar] [CrossRef]
- Cao, J.L.; Kürsten, D.; Schneider, S.; Knauer, A.; Günther, P.M.; Köhler, J.M. Uncovering toxicological complexity by multi-dimensional screenings in microsegmented flow: Modulation of antibiotic interference by nanoparticles. Lab Chip 2012, 12, 474–484. [Google Scholar] [CrossRef]









Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Henkel, T.; Mayer, G.; Hampl, J.; Cao, J.; Ehrhardt, L.; Schober, A.; Groß, G.A. From Microtiter Plates to Droplets—There and Back Again. Micromachines 2022, 13, 1022. https://doi.org/10.3390/mi13071022
Henkel T, Mayer G, Hampl J, Cao J, Ehrhardt L, Schober A, Groß GA. From Microtiter Plates to Droplets—There and Back Again. Micromachines. 2022; 13(7):1022. https://doi.org/10.3390/mi13071022
Chicago/Turabian StyleHenkel, Thomas, Günter Mayer, Jörg Hampl, Jialan Cao, Linda Ehrhardt, Andreas Schober, and Gregor Alexander Groß. 2022. "From Microtiter Plates to Droplets—There and Back Again" Micromachines 13, no. 7: 1022. https://doi.org/10.3390/mi13071022
APA StyleHenkel, T., Mayer, G., Hampl, J., Cao, J., Ehrhardt, L., Schober, A., & Groß, G. A. (2022). From Microtiter Plates to Droplets—There and Back Again. Micromachines, 13(7), 1022. https://doi.org/10.3390/mi13071022