Deep Learning for Mango (Mangifera indica) Panicle Stage Classification



Abstract
:1. Introduction
2. Materials and Methods
2.1. Image Acquisition
2.2. Data Preparation
2.2.1. Image Annotation and Labelling
2.2.2. Training, Validation and Test Sets
2.2.3. Computing
2.3. Detection and Classification Models
2.4. Estimation of Peak of Flowering
3. Results
3.1. Segmentation Method
3.2. Deep Learning Methods
4. Discussion
4.1. Method Comparison
4.1.1. Pixel Segmentation
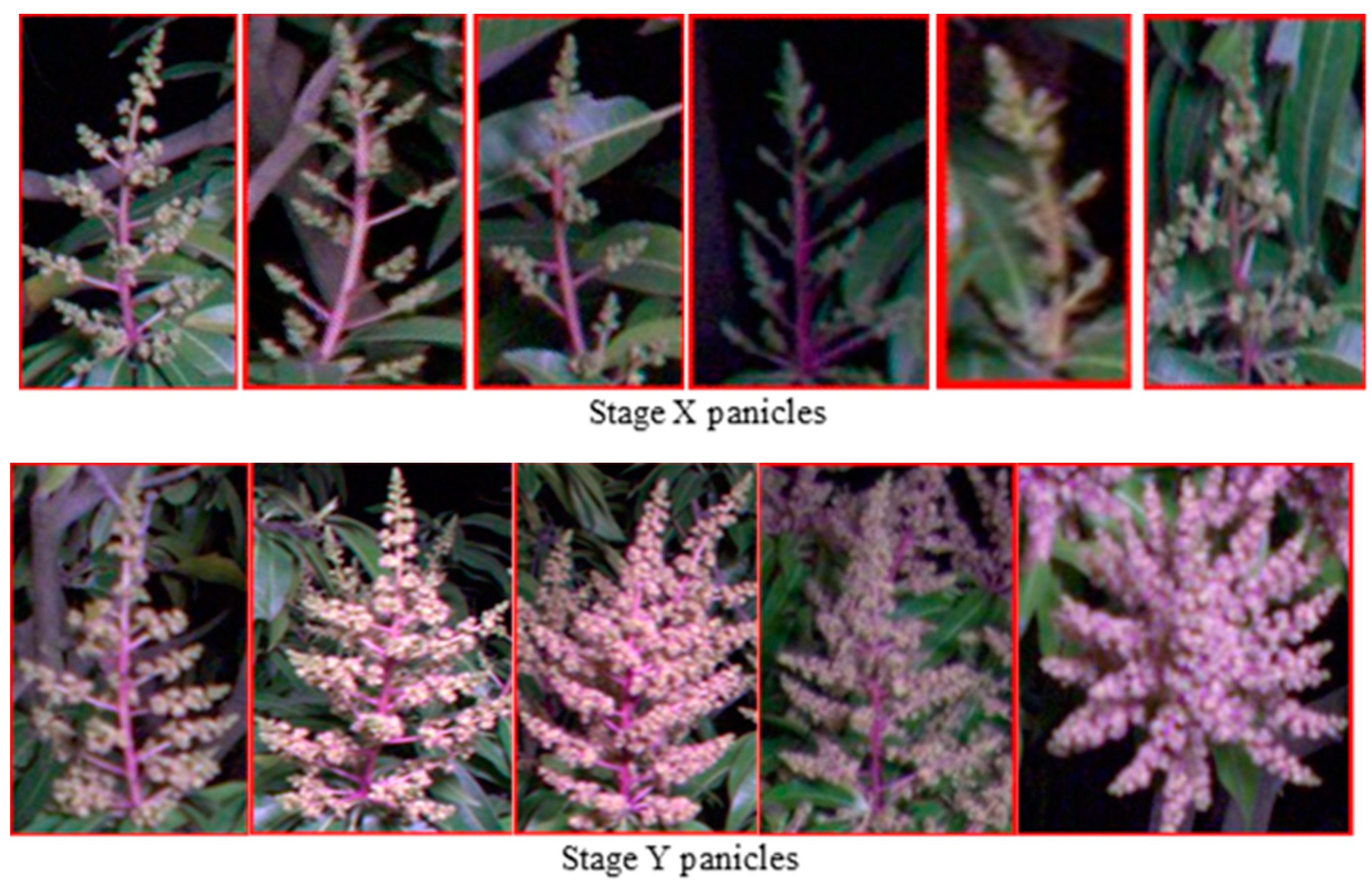
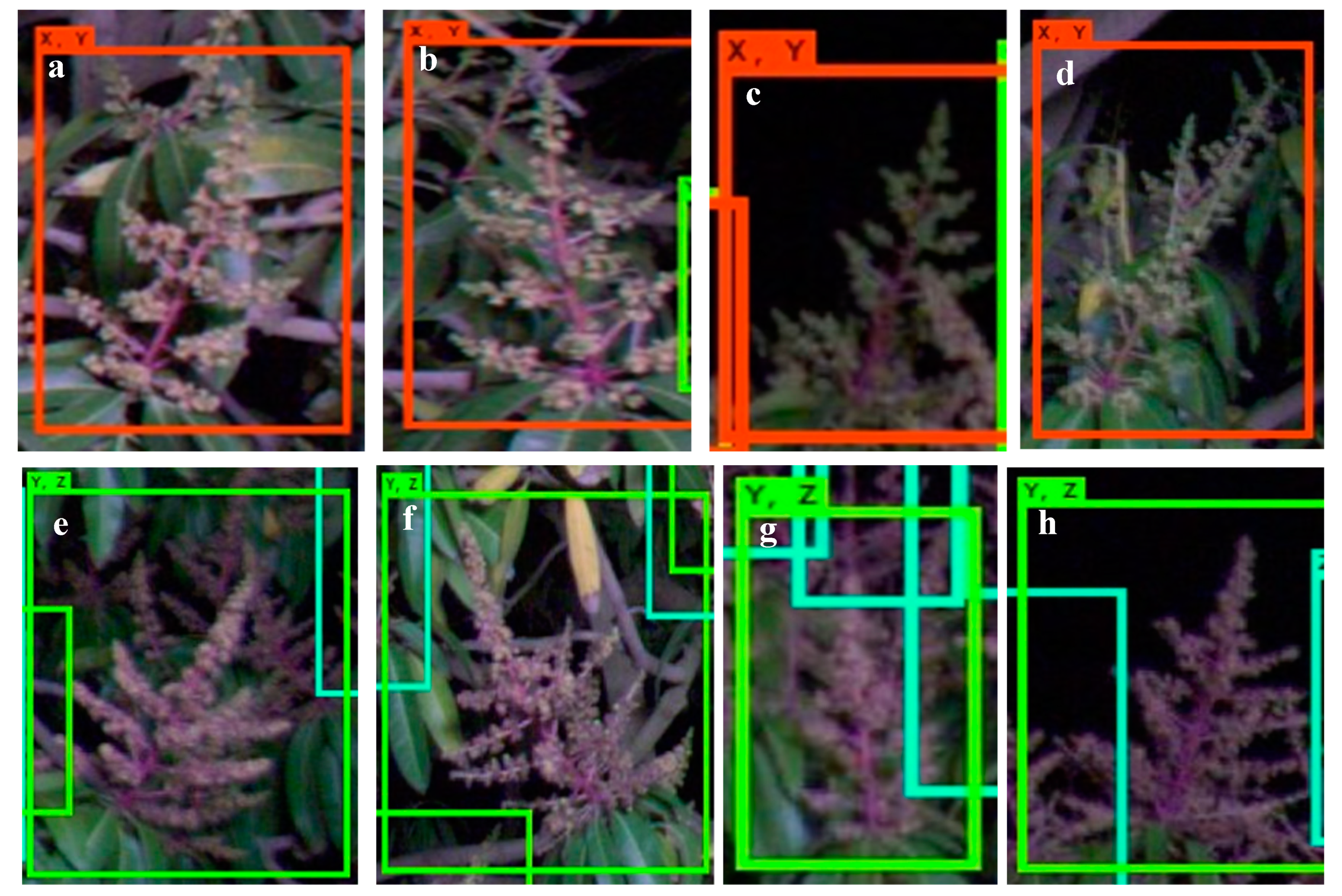
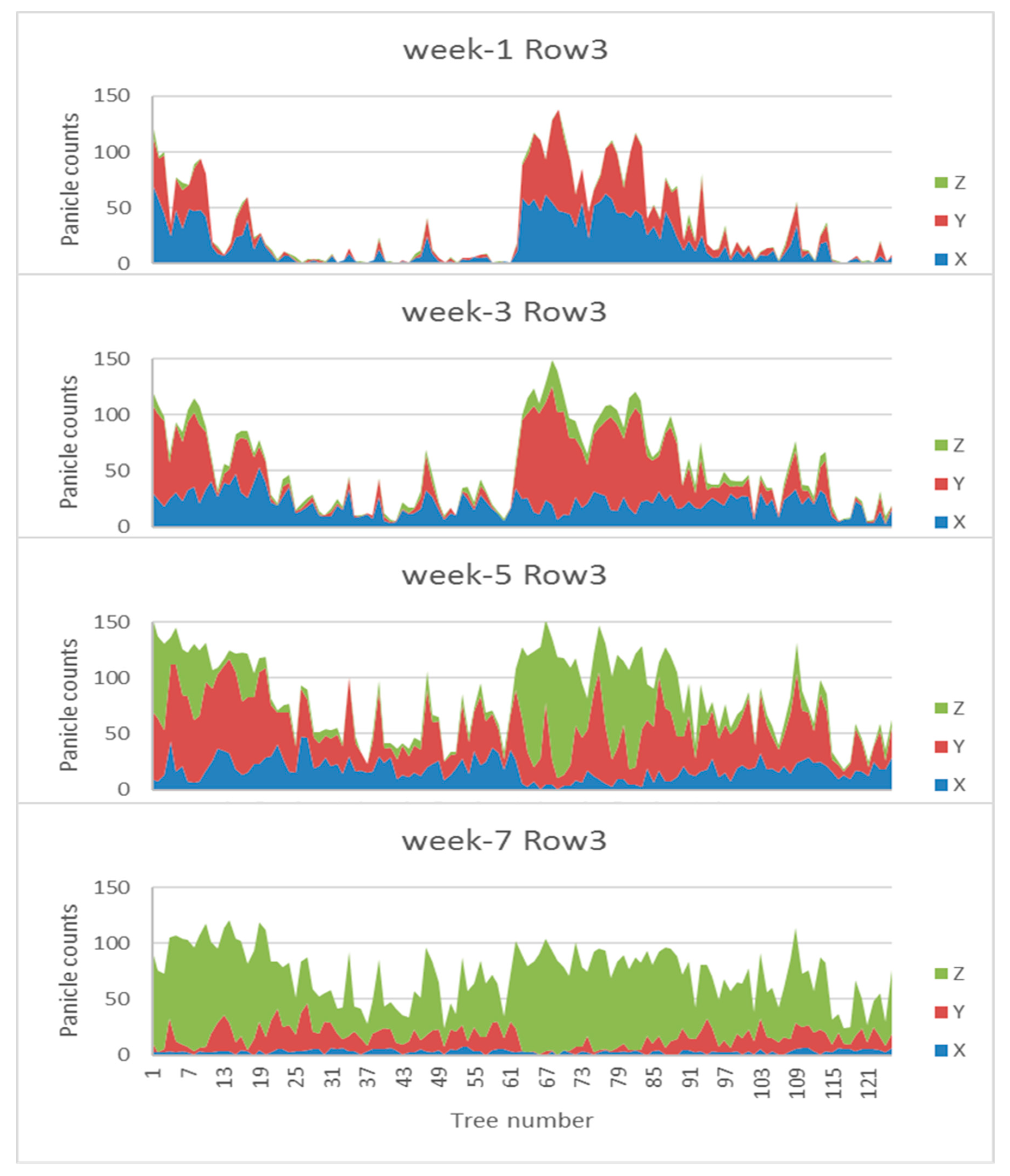
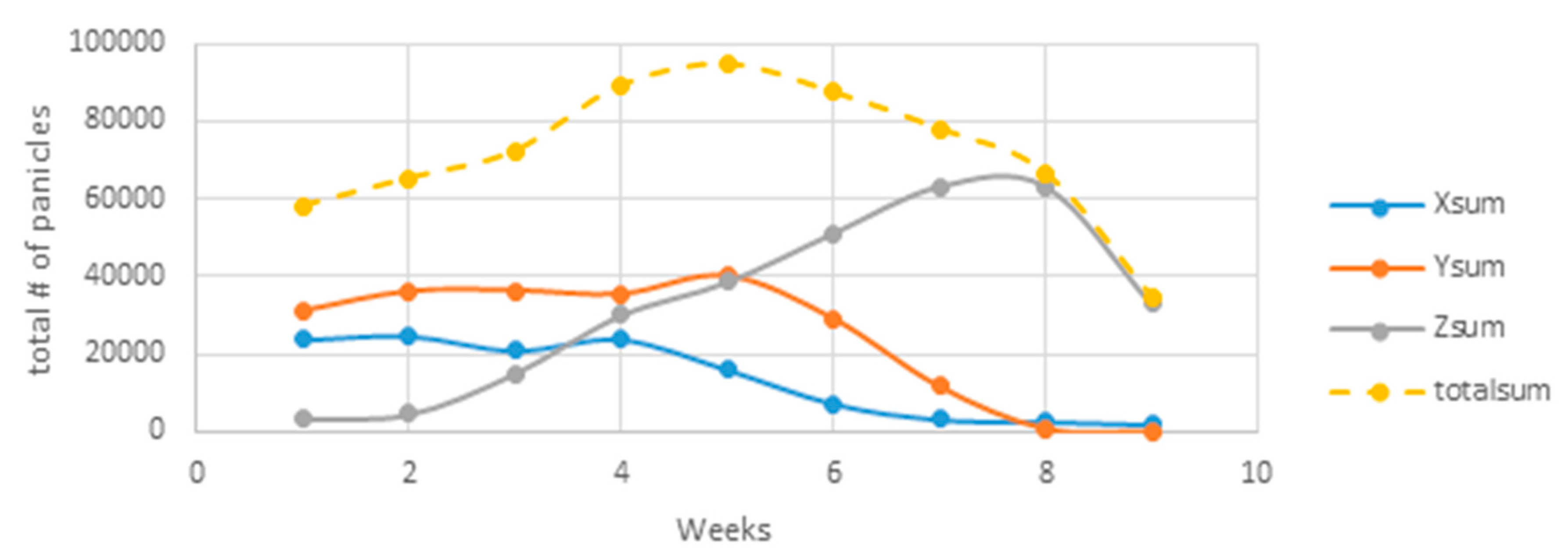
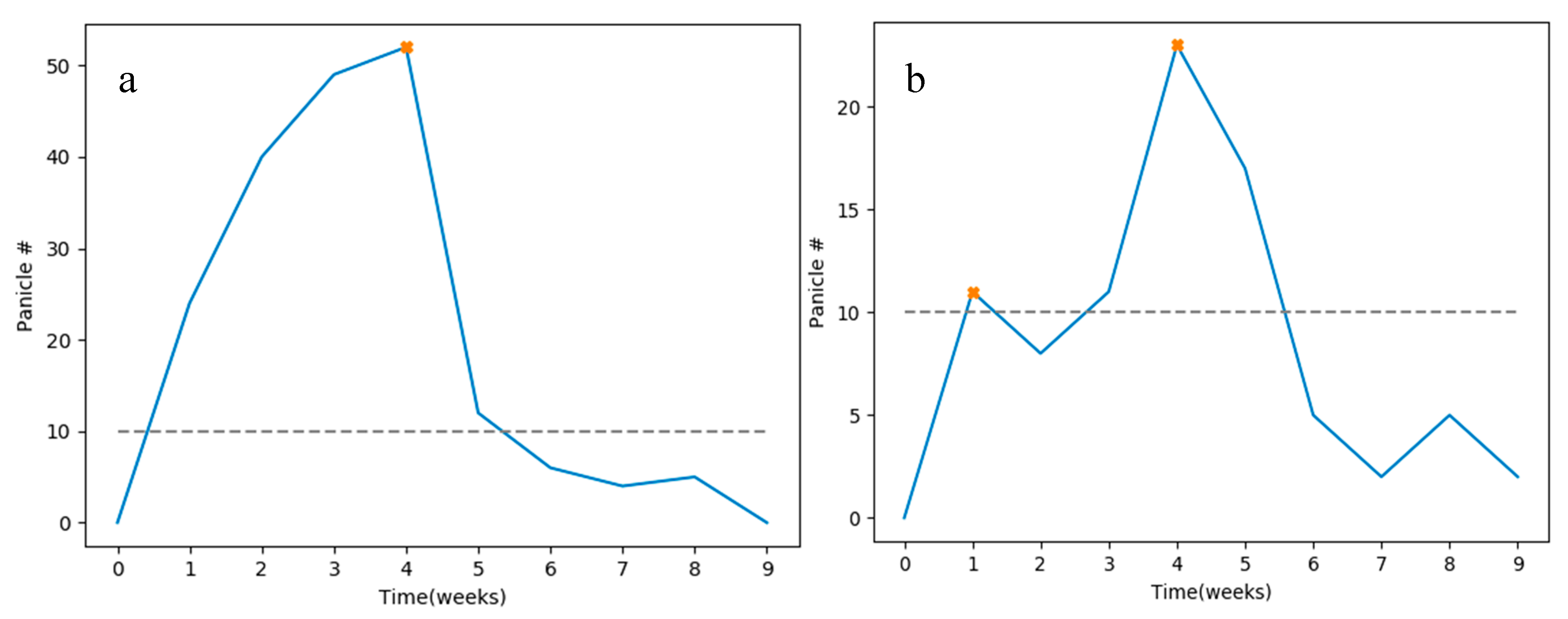
4.1.2. Defining Flowering Stages
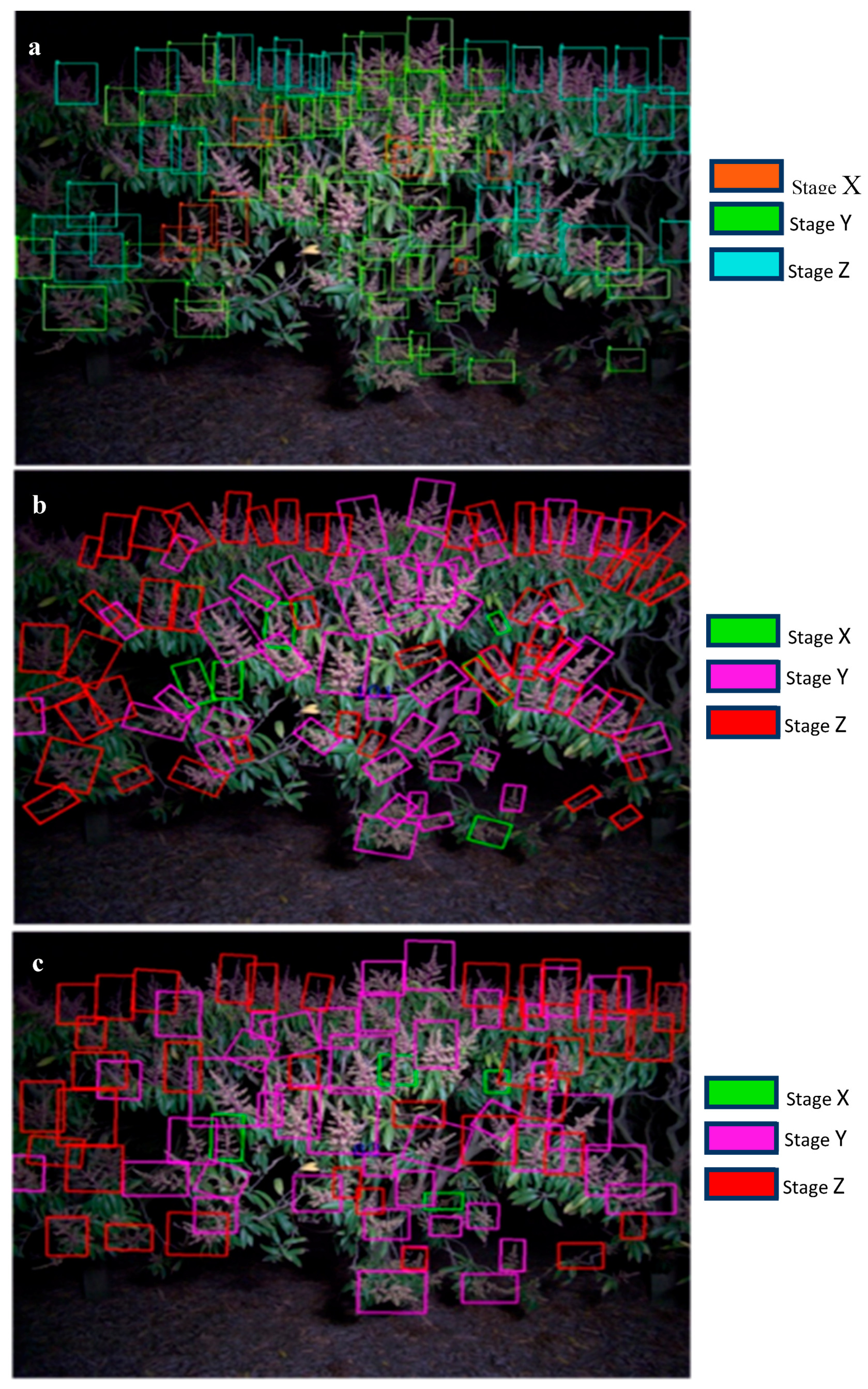
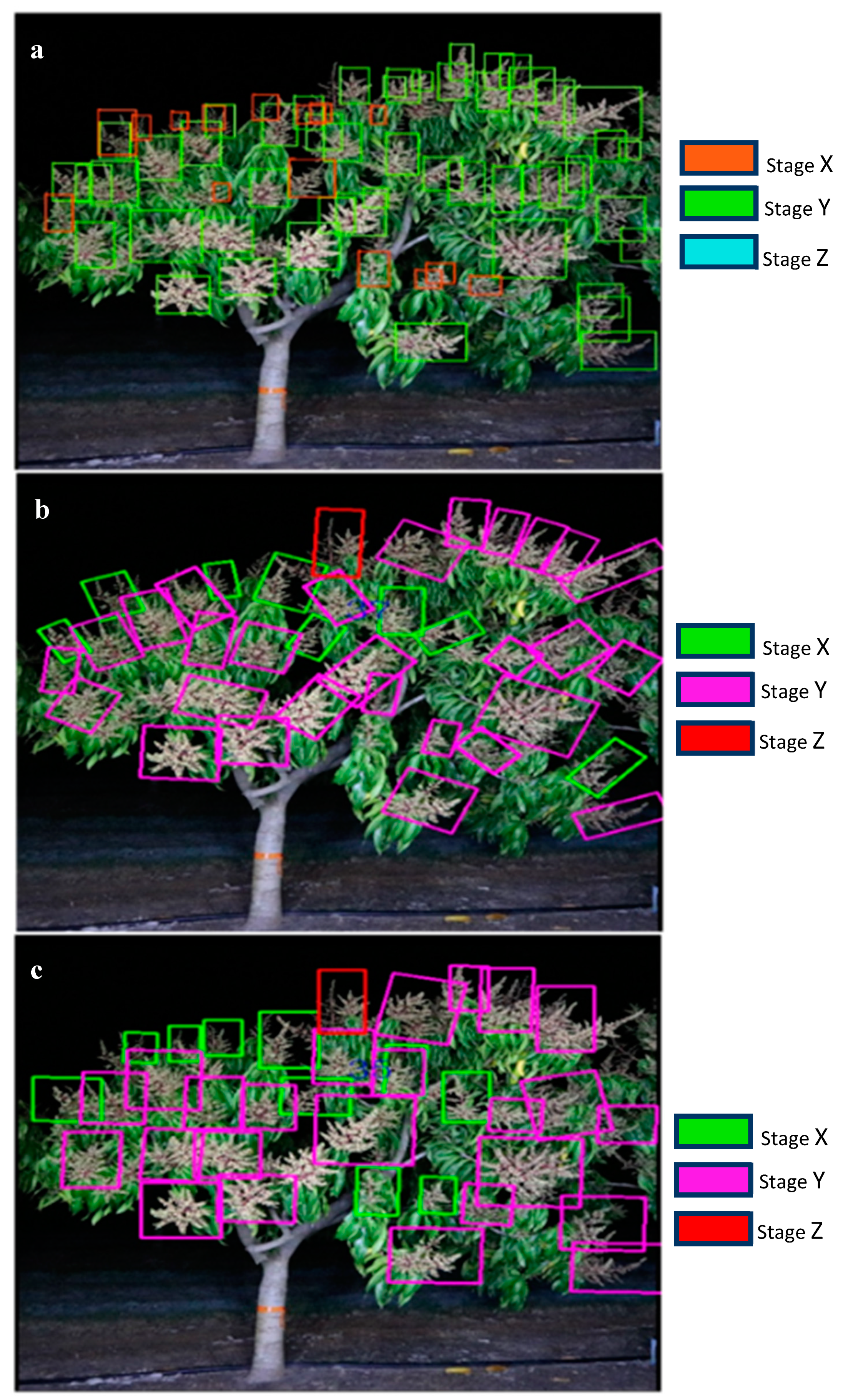
4.1.3. Deep Learning Methods: Use of Rotated Bounding Boxes
4.1.4. Deep Learning Methods: A Comparison
4.2. Applications
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Aggelopoulou, A.; Bochtis, D.; Fountas, S.; Swain, K.C.; Gemtos, T.; Nanos, G. Yield prediction in apple orchards based on image processing. Precis. Agric. 2011, 12, 448–456. [Google Scholar] [CrossRef]
- Dorj, U.-O.; Lee, M. A new method for tangerine tree flower recognition. In Computer Applications for Bio-Technology, Multimedia, and Ubiquitous City; Springer: Heidelberg, Germany, 2012; pp. 49–56. [Google Scholar]
- Horton, R.; Cano, E.; Bulanon, D.; Fallahi, E. Peach flower monitoring using aerial multispectral imaging. J. Imaging 2017, 3, 2. [Google Scholar] [CrossRef]
- Hočevar, M.; Širok, B.; Godeša, T.; Stopar, M. Flowering estimation in apple orchards by image analysis. Precis. Agric. 2014, 15, 466–478. [Google Scholar] [CrossRef]
- Oppenheim, D.; Edan, Y.; Shani, G. Detecting Tomato Flowers in Greenhouses Using Computer Vision. Int. J. Comput. Electr. Autom. Control Inform. Eng. 2017, 11, 104–109. [Google Scholar]
- Underwood, J.P.; Hung, C.; Whelan, B.; Sukkarieh, S. Mapping almond orchard canopy volume, flowers, fruit and yield using lidar and vision sensors. Comput. Electron. Agric. 2016, 130, 83–96. [Google Scholar] [CrossRef]
- Diago, M.P.; Sanz-Garcia, A.; Millan, B.; Blasco, J.; Tardaguila, J. Assessment of flower number per inflorescence in grapevine by image analysis under field conditions. J. Sci. Food Agric. 2014, 94, 1981–1987. [Google Scholar] [CrossRef]
- Guo, W.; Fukatsu, T.; Ninomiya, S. Automated characterization of flowering dynamics in rice using field-acquired time-series RGB images. Plant Methods 2015, 11, 7–23. [Google Scholar] [CrossRef] [Green Version]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef] [Green Version]
- Koirala, A.; Walsh, K.B.; Wang, Z.; McCarthy, C. Deep learning—Method overview and review of use for fruit detection and yield estimation. Comput. Electron. Agric. 2019, 162, 219–234. [Google Scholar] [CrossRef]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and systems for fruit detection and localization: A review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Koirala, A.; Wang, Z.; Walsh, K.; McCarthy, C. Deep learning for real-time fruit detection and orchard fruit load estimation: Benchmarking of ‘MangoYOLO’. Precis. Agric. 2019, 20, 1107–1135. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 779–788. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. Available online: https://arxiv.org/abs/1706.09579 (Accessed on 10 December 2019).
- Dias, P.A.; Tabb, A.; Medeiros, H. Apple flower detection using deep convolutional networks. Comput. Ind. 2018, 99, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks; Springer: Basel, Switzerland, 2014; pp. 818–833. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Dias, P.A.; Tabb, A.; Medeiros, H. Multispecies Fruit Flower Detection Using a Refined Semantic Segmentation Network. IEEE Robot. Autom. Lett. 2018, 3, 3003–3010. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. 2018, 40, 834–848. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Verma, B.; Walsh, K.B.; Subedi, P.; Koirala, A. Automated mango flowering assessment via refinement segmentation. In Proceedings of the International Conference on Image and Vision Computing New Zealand (IVCNZ), Palmerston North, New Zealand, 21–22 Novermber 2016; pp. 1–6. [Google Scholar]
- Wang, Z.; Underwood, J.; Walsh, K.B. Machine vision assessment of mango orchard flowering. Comput. Electron. Agric. 2018, 151, 501–511. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern. Anal. 2017, 39, 91–99. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, Y.; Zhu, X.; Wang, X.; Yang, S.; Li, W.; Wang, H.; Fu, P.; Luo, Z. R2CNN: Rotational Region CNN for Orientation Robust Scene Text Detection. Available online: https://arxiv.org/abs/1901.06032 (accessed on 10 December 2019).
- OpenCV. OpenCV Library. Available online: http://opencv.org/ (accessed on 4 November 2019).
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7263–7271. [Google Scholar]
- Yeshitela, T.; Robbertse, P.; Stassen, P. The impact of panicle and shoot pruning on inflorescence and yield related developments in some mango cultivars. J. Appl. Hort. 2003, 5, 69–75. [Google Scholar]
- Khan, A.; Sohail, A.; Zahoora, U.; Qureshi, A.S. A Survey of the Recent Architectures of Deep Convolutional Neural Networks. Available online: https://arxiv.org/abs/1901.06032 (accessed on 10 December 2019).
- Walsh, K.; Wang, Z. Monitoring fruit quality and quantity in mangoes. In Achieving Sustainable Cultivation of Mangoes; Galán Saúco, V., Lu, P., Eds.; Burleigh Dodds Science Publishing: Cambridge, UK, 2018; pp. 313–338. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orchard Name | Location (lat., long.) | Cultivar | Camera | Image Resolution |
|---|---|---|---|---|
| Orchard A | −23.032749, 150.620470 | Honey Gold | Basler | 2464 × 2048 pixels |
| Orchard B | −25.144, 152.377 | Calypso | Canon | 6000 × 4000 pixels |
| Number of Images | Number of Panicles | Total | |||
|---|---|---|---|---|---|
| Stage X | Stage Y | Stage Z | |||
| Training set | 54 | 1007 | 1107 | 1064 | 3178 |
| Validation set | 6 | 167 | 316 | 122 | 635 |
| Test set | 48 | - | - | - | 2853 |
| Week | 1 16 Aug | 2 23 Aug | 3 30 Aug | 4 6 Sep | 5 13 Sep | 6 20 Sep | 7 27 Sept |
|---|---|---|---|---|---|---|---|
| (Stage Y) R2 | 0.903 | 0.896 | 0.892 | 0.788 | 0.853 | 0.871 | 0.708 |
| (Stage X + Y) R2 | 0.914 | 0.900 | 0.777 | 0.496 | 0.791 | 0.846 | 0.671 |
| (Stage X + Y + Z) R2 | 0.898 | 0.865 | 0.825 | 0.579 | 0.254 | 0.357 | 0.327 |
| Ratio of stage Y to total panicle count | 0.376 | 0.390 | 0.395 | 0.361 | 0.416 | 0.320 | 0.147 |
| Ground Truth | R2CNN(-Rotated) | R2CNN-Upright | MangoYOLO(-Upright) | MangoYOLO-Rotated | YOLOv3-Rotated | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Wk. | X | Y | Z | total | X | Y | Z | total | X | Y | Z | total | X | Y | Z | total | X | Y | Z | total | X | Y | Z | total |
| 6 | 1 | 37 | 72 | 110 | 1 | 27 | 64 | 92 | 1 | 30 | 46 | 77 | 0 | 27 | 69 | 96 | 0 | 36 | 73 | 109 | 0 | 25 | 100 | 125 |
| 5 | 13 | 67 | 42 | 122 | 9 | 54 | 36 | 99 | 11 | 41 | 29 | 81 | 0 | 48 | 23 | 71 | 3 | 65 | 22 | 90 | 0 | 67 | 40 | 107 |
| 4 | 28 | 91 | 8 | 127 | 9 | 62 | 15 | 86 | 22 | 53 | 7 | 82 | 16 | 73 | 11 | 100 | 24 | 78 | 6 | 108 | 11 | 75 | 16 | 102 |
| 3 | 28 | 69 | 0 | 97 | 16 | 49 | 5 | 70 | 22 | 46 | 0 | 68 | 21 | 57 | 0 | 78 | 24 | 65 | 0 | 89 | 22 | 60 | 1 | 83 |
| 2 | 46 | 28 | 0 | 74 | 38 | 21 | 1 | 60 | 36 | 17 | 0 | 53 | 43 | 25 | 0 | 68 | 45 | 21 | 0 | 66 | 39 | 23 | 0 | 62 |
| 1 | 51 | 24 | 0 | 75 | 36 | 16 | 0 | 52 | 43 | 18 | 0 | 61 | 55 | 18 | 0 | 73 | 54 | 17 | 0 | 71 | 54 | 20 | 0 | 74 |
| RMSE | 11.6 | 16.4 | 5.4 | 25.8 | 6.3 | 21.8 | 11.8 | 32.3 | 8.0 | 12.7 | 7.9 | 25.6 | 4.9 | 6.9 | 8.2 | 16.0 | 9.6 | 9.3 | 11.9 | 15.4 | ||||
| Bias | −9.7 | −14.5 | −1.7 | −24.3 | −5.3 | −18.5 | −6.7 | −30.5 | −5.3 | −11.3 | −3.2 | −19.8 | −2.8 | −5.7 | −3.5 | −12.0 | −6.8 | −7.7 | +5.8 | −8.7 | ||||
| Average Precision1 | 56.3 | 62.0 | 69.3 | 62.5 | 80.8 | 64.8 | 67.2 | 70.9 | 74.1 | 76.7 | 65.6 | 72.2 | 68.7 | 78.1 | 60.5 | 69.1 | 65.4 | 74.0 | 55.4 | 65.0 | ||||
| F12 | 69.6 | 75.6 | 75.7 | 74.0 | 89.4 | 78.7 | 80.4 | 82.0 | 77.8 | 77.8 | 71.4 | 76.5 | 75.4 | 79.0 | 69.5 | 76.1 | 76.5 | 77.1 | 67.2 | 74.9 | ||||
| Detection Method | R2 | RMSE | Bias |
|---|---|---|---|
| R2CNN(-rotated) | 0.81 | 91.9 | −72.2 |
| R2CNN-upright | 0.76 | 93.2 | −72.4 |
| MangoYOLO(-upright) | 0.86 | 50.7 | −30.3 |
| MangoYOLO-rotated | 0.80 | 35.6 | −6.4 |
| YOLOv3-rotated | 0.83 | 53.5 | −33.6 |
| Faster R-CNN [21] | 0.78 | - | - |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koirala, A.; Walsh, K.B.; Wang, Z.; Anderson, N. Deep Learning for Mango (Mangifera indica) Panicle Stage Classification. Agronomy 2020, 10, 143. https://doi.org/10.3390/agronomy10010143
Koirala A, Walsh KB, Wang Z, Anderson N. Deep Learning for Mango (Mangifera indica) Panicle Stage Classification. Agronomy. 2020; 10(1):143. https://doi.org/10.3390/agronomy10010143
Chicago/Turabian StyleKoirala, Anand, Kerry B. Walsh, Zhenglin Wang, and Nicholas Anderson. 2020. "Deep Learning for Mango (Mangifera indica) Panicle Stage Classification" Agronomy 10, no. 1: 143. https://doi.org/10.3390/agronomy10010143
APA StyleKoirala, A., Walsh, K. B., Wang, Z., & Anderson, N. (2020). Deep Learning for Mango (Mangifera indica) Panicle Stage Classification. Agronomy, 10(1), 143. https://doi.org/10.3390/agronomy10010143