Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
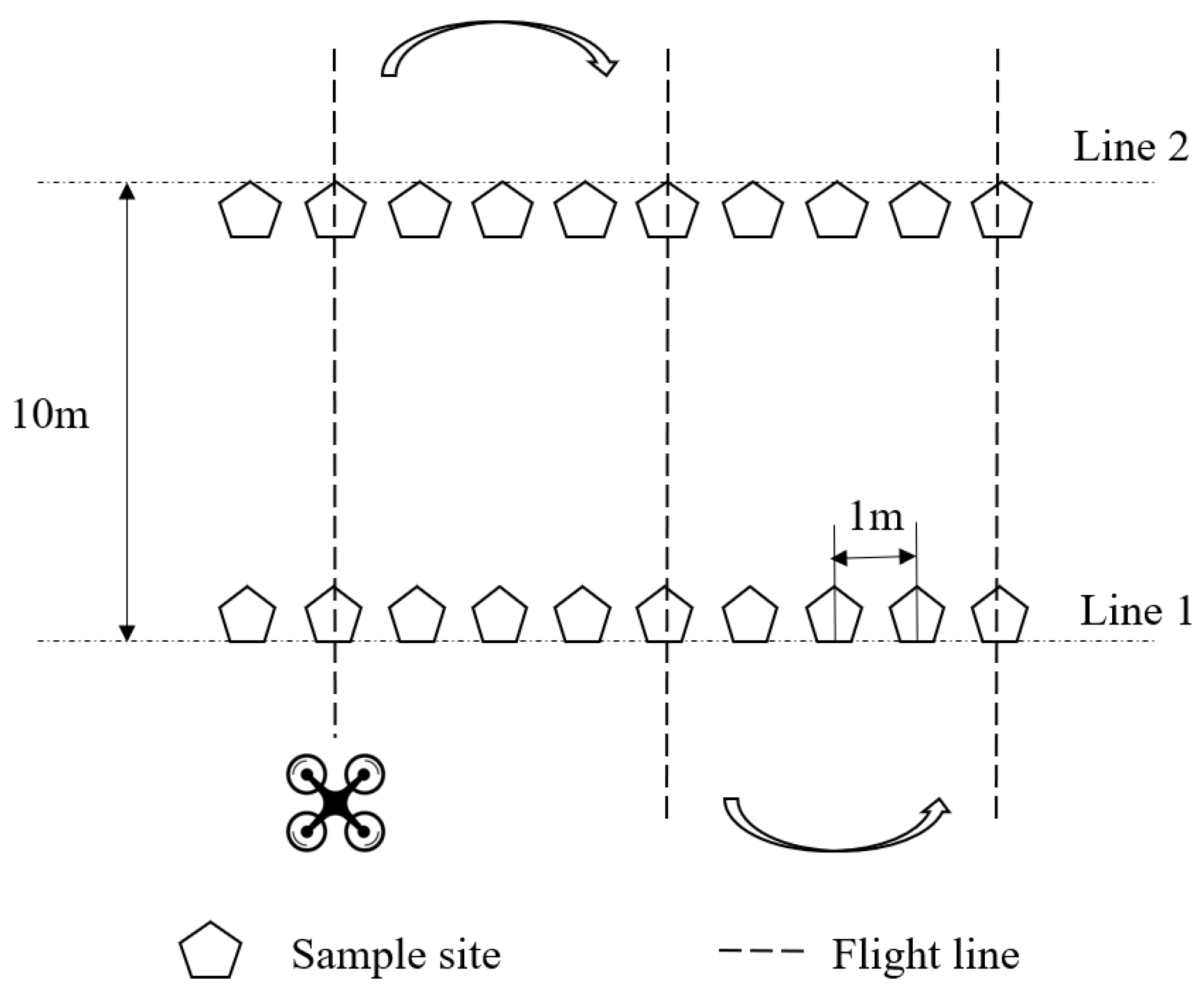
2.1. Field Plots
2.2. UAV and Reference Equipment Selection
2.3. Experimental Treatment
2.3.1. Characterization of Spray Deposition
2.3.2. Control Effect of Rice Planthoppers Test
2.4. Nozzle Droplet Size Test
2.5. Environment Test
2.6. Statistical Analysis
3. Results
3.1. Droplet Size Distribution
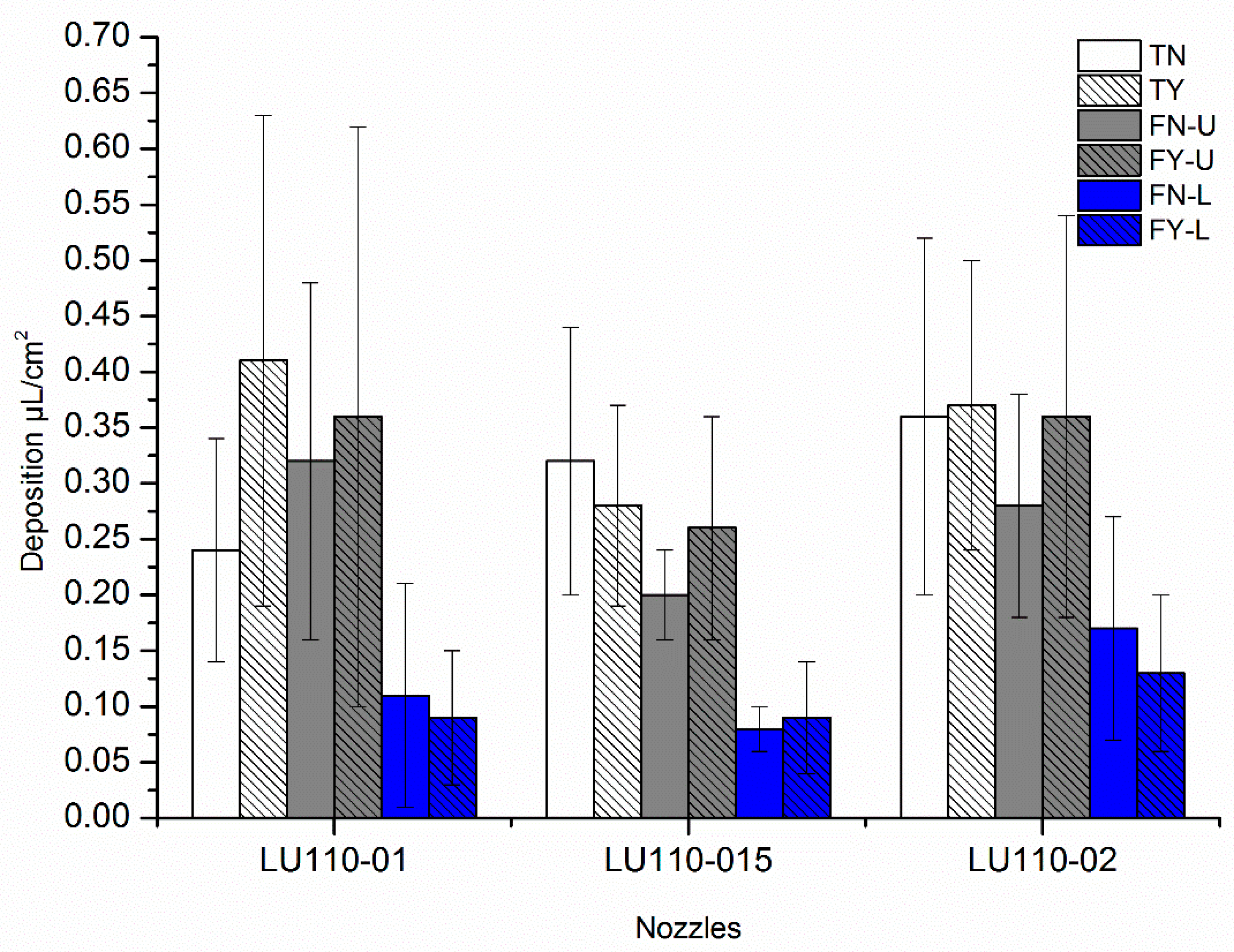
3.2. Droplet Deposition
3.3. Droplet Density
3.4. Coverage
3.5. Control Effect of Rice Planthoppers
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fang, M.; Xian, W.; Chang, Y.; Lu, L.; Lei, W.; Qiu, C. Rice Cropping Regionalization in China. Chin. J. Rice Sci. 1988, 03, 97–110. (In Chinese) [Google Scholar]
- Wu, J. Agricultural Entomology, 2nd ed.; China Agriculture Press: Beijing, China, 2009. (In Chinese) [Google Scholar]
- Sheng, C.; Xuan, W.; Jiao, X. Causes, trend and control strategies of disaster of rice borers in China. J. Nat. Disasters 2002, 11, 103–108. [Google Scholar]
- Li, S. The Relationship between Climate Change and Pest Generation Reproduction, Overwintering and Migration Flight. Acta Agric. Boreall Sin. 1994, 02, 110–114. (In Chinese) [Google Scholar]
- Prediction of major rice pests and diseases in China in 2019. Available online: https://www.natesc.org.cn/Html/2019_01_02/28092_151760_2019_01_02_456883.html (accessed on 02 May 2019).
- Lan, Y.; Wang, G. Development situation and prospects of China’s crop protection UAV industry. Agric. Eng. Technol. 2018, 38, 17–27. (In Chinese) [Google Scholar]
- Lan, Y.; Chen, S. Current status and trends of plant protection UAV and its spraying technology in China. Int. J. Precis. Agric. Aviat. 2018, 1, 1–9. [Google Scholar] [CrossRef]
- Wang, L.; Lan, Y.; Zhang, Y.; Zhang, H.; Tahir, M.N.; Ou, S.; Liu, X.; Chen, P. Applications and Prospects of Agricultural Unmanned Aerial Vehicle Obstacle Avoidance Technology in China. Sensors 2019, 19, 642. [Google Scholar] [CrossRef] [Green Version]
- Lan, Y.; Shengde, C.; Fritz, B.K. Current status and future trends of precision agricultural aviation technologies. Int. J. Agric. Biol. Eng. 2017, 10, 1–17. [Google Scholar]
- Chen, S.; Lan, Y.; Li, J.; Zhou, Z.; Jin, J.; Liu, A. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy. Trans. Chin. Soc. Agric. Eng. 2016, 32, 40–46. (In Chinese) [Google Scholar]
- Wang, C.; Song, J.; He, X.; Wang, Z.; Wang, S.; Meng, Y. Effect of flight parameters on distribution characteristics of pesticide spraying droplets deposition of plant-protection unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2017, 33, 109–116. (In Chinese) [Google Scholar]
- Qin, W.; Qiu, B.; Xue, X.; Chen, C.; Xu, Z.; Zhou, Q. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers. Crop Prot. 2016, 85, 79–88. [Google Scholar] [CrossRef]
- Qin, W.; Xue, X.; Zhang, S.; Gu, W.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Lan, Y.; Qi, H.; Chen, P.; Hewitt, A.; Han, Y. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat. Pest Manag. Sci. 2019, 75, 1546–1555. [Google Scholar] [CrossRef] [PubMed]
- Xin, F.; Zhao, J.; Zhou, Y.; Wang, G.; Han, X.; Fu, W.; Deng, J.; Lan, Y. Effects of Dosage and Spraying Volume on Cotton Defoliants Efficacy: A Case Study Based on Application of Unmanned Aerial Vehicles. Agronomy 2018, 8, 85. [Google Scholar] [CrossRef] [Green Version]
- NY/T 3213-2018, Chinese standard: Technical specification of quality evaluation for crop protection UAS; The ministry of agriculture of the People’s Republic: Beijing, China, 2008. (In Chinese)
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef] [Green Version]
- Lou, Z.; Xin, F.; Han, X.; Lan, Y.; Duan, T.; Fu, W. Effect of unmanned aerial vehicle flight height on droplet distribution, drift and control of cotton aphids and spider mites. Agronomy 2018, 8, 187. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Shi, Y.; Lan, Y.; Guo, S. Vertical distribution and vortex structure of rotor wind field under the influence of rice canopy. Comput. Electron. Agric. 2019, 159, 140–146. [Google Scholar] [CrossRef]
- Wolf, R.E.; Daggupati, N.P. Nozzle type effect on soybean canopy penetration. Appl. Eng. Agric. 2009, 25, 23–30. [Google Scholar] [CrossRef]
- Lan, Y.; Hoffmann, W.C.; Fritz, B.K.; Martin, D.E.; Lopez, J.D. Spray drift mitigation with spray mix adjuvants. Appl. Eng. Agric. 2008, 24, 5–10. [Google Scholar] [CrossRef]
- van Zyl, S.A.; Brink, J.; Calitz, F.J.; Coertze, S.; Fourie, P.H. The use of adjuvants to improve spray deposition and Botrytis cinerea control on Chardonnay grapevine leaves. Crop Prot. 2010, 29, 58–67. [Google Scholar] [CrossRef]
- Stevens, P.J. Organosilicone surfactants as adjuvants for agrochemicals. Pestic. Sci. 1993, 38, 103–122. [Google Scholar] [CrossRef]
- He, Y.; Xiao, S.; Fang, H.; Dong, T.; Tang, Y.; Nie, P.; Wu, J.; Luo, S. Development situation and spraying decision of spray nozzle for plant protection UAV. Trans. Chin. Soc. Agric. Eng. 2018, 34, 113–124. (In Chinese) [Google Scholar]
- Gil, E.; Balsari, P.; Gallart, M.; Llorens, J.; Marucco, P.; Andersen, P.G.; Fàbregas, X.; Llop, J. Determination of drift potential of different flat fan nozzles on a boom sprayer using a test bench. Crop Prot. 2014, 56, 58–68. [Google Scholar] [CrossRef]
- Li, X.; Andaloro, J.T.; Lang, E.B.; Pan, Y. Best Management Practices for Unmanned Aerial Vehicles (UAVs) Application of Insecticide Products on Rice; Proceedings of the 2019 ASABE Annual International Meeting, Boston, MA, USA, 7–10 July 2019; American Society of Agricultural and Biological Engineers: St. Joseph, MO, USA, 2019; p. 1. [Google Scholar]
- Qin, W.; Xue, X.; Zhou, Q.; Cai, C.; Wang, B.; Jin, Y. Use of RhB and BSF as fluorescent tracers for determining pesticide spray distribution. Anal. Methods-UK 2018, 10, 4073–4078. [Google Scholar] [CrossRef]
- Gao, S.; Wang, G.; Zhou, Y.; Wang, M.; Yang, D.; Yuan, H.; Yan, X. Water-soluble food dye of Allura Red as a tracer to determine the spray deposition of pesticide on target crops. Pest Manag. Sci. 2019, 75, 2592–2597. [Google Scholar] [CrossRef] [PubMed]
- Zhu, H.; Salyani, M.; Fox, R.D. A portable scanning system for evaluation of spray deposit distribution. Comput. Electron. Agric. 2011, 76, 38–43. [Google Scholar] [CrossRef]
- Foqué, D.; Nuyttens, D. Effects of nozzle type and spray angle on spray deposition in ivy pot plants. Pest Manag. Sci. 2011, 67, 199–208. [Google Scholar] [CrossRef]
- Czaczyk, Z. Spray classification for selected flat fan nozzles. J. Plant Prot. Res. 2012, 52, 180–183. [Google Scholar] [CrossRef]
- Ferguson, J.C.; Chechetto, R.G.; Hewitt, A.J.; Chauhan, B.S.; Adkins, S.W.; Kruger, G.R.; O’Donnell, C.C. Assessing the deposition and canopy penetration of nozzles with different spray qualities in an oat (Avena sativa L.) canopy. Crop Prot. 2016, 81, 14–19. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Xu, G.; Xu, X.; Xu, L.; Gu, Z.; Qiu, B. Influence of spray nozzle and spray volume on pesticide deposition and control effect in rice. J. Plant Prot. 2019, 46, 409–416. (In Chinese) [Google Scholar]
- Creech, C.F.; Henry, R.S.; Hewitt, A.J.; Kruger, G.R. Herbicide spray penetration into corn and soybean canopies using air-induction nozzles and a drift control adjuvant. Weed Technol. 2018, 32, 72–79. [Google Scholar] [CrossRef]
- Dong Yuxuan, G.Z.X.D. Influence of droplet densities and spray methods on the efficiency of chlorpyrifos against brown planthopper. J. Plant Prot. 2012, 39, 75–80. (In Chinese) [Google Scholar]
- Prokop, M.; Veverka, K. Influence of droplet spectra on the efficiency of contact fungicides and mixtures of contact and systemic fungicides. Plant Prot. Sci. 2006, 42, 26–33. [Google Scholar] [CrossRef] [Green Version]
- Luo, S. Research on Rice Planthopper. J. Agric. Catastrophology 2011, 01, 1–13. (In Chinese) [Google Scholar]
- He, L.; Wang, G.; Hu, T.; Meng, Y.; Yan, X.; Yuan, H. Influences of spray adjuvants and spray volume on the droplet deposition distribution with unmanned aerial vehicle (UAV) spraying on rice. Acta Phytophylacica Sin. 2017, 44, 1046–1052. (In Chinese) [Google Scholar]
- Gil, E.; Campos, J.; Ortega, P.; Llop, J.; Gras, A.; Armengol, E.; Salcedo, R.; Gallart, M. DOSAVIÑA: Tool to calculate the optimal volume rate and pesticide amount in vineyard spray applications based on a modified leaf wall area method. Comput. Electron. Agric. 2019, 160, 117–130. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Parameters |
|---|---|
| Total Weight (kg) | 12 ± 1 |
| Size (m) | 1.37*1.37*0.65 |
| Battery capacity (mA) | 16,000*2 |
| Working efficiency (ha) | 0.7–1.0 |
| Runtime (min) | ≥10 |
| Operation method | Remote Control or Mobile |
| Boom length (cm) | 90.5 |
| height above crop canopy (m) | 1–3 |
| Number of nozzles | 4 |
| Unit flow (L/min) | 1.92–2.36 |
| Load capacity (L) | 10 |
| Spraying width (m) | 3–5 |
| Nozzles | Flow Rate of Total Nozzles (L/min) | Spraying Volume (L/ha) | Height (m) | Velocity (m/s) | Spray Width (m) |
|---|---|---|---|---|---|
| LU110-01 | 1.04 | 15 | 1.5 | 3.3 | 3.5 |
| LU110-015 | 1.58 | 5 | |||
| LU110-02 | 1.93 | 6.1 |
| Treatment | Zone | Nozzles | Add Adjuvant |
|---|---|---|---|
| 1 | a | LU110-01 | Y |
| 2 | N | ||
| 3 | b | LU110-015 | Y |
| 4 | N | ||
| 5 | c | LU110-02 | Y |
| 6 | N |
| Date | Treatment | Mean Temperature °C | Mean Humidity % | Mean Wind speed m/s |
|---|---|---|---|---|
| May 10 | 1,2 | 28.8 ± 0.10 | 72.4 ± 0.45 | 1.1 ± 0.30 |
| 3,4 | 29.3 ± 0.23 | 69.0 ± 0.55 | 0.9 ± 0.21 | |
| 5,6 | 29.4 ± 0.30 | 73.4 ± 1.30 | 1.1 ± 0.42 | |
| June 10 | 1,2 | 30.5 ± 0.35 | 82.7 ± 0.69 | 1.5 ± 0.52 |
| 3,4 | 29.9 ± 0.21 | 83.5 ± 1.20 | 1.1 ± 0.83 | |
| 5,6 | 29.7 ± 0.19 | 85.1 ± 1.75 | 1.7 ± 0.75 |
| Nozzles | DV0.5 μm | DV0.1 μm | DV0.9 μm | Droplet Classification |
|---|---|---|---|---|
| XALU110-01 | 132.8 ± 5.2 | 63.7 ± 1.1 | 180.2 ± 2.1 | Fine |
| LU110-015 | 146.6 ± 3.8 | 63.5 ± 3.2 | 197.6 ± 1.9 | Fine |
| LU110-02 | 167.0 ± 6.7 | 67.4 ± 2.1 | 222.4 ± 3.2 | Fine |
| Treatment | Tillering Stage | Flowering Stage | |
|---|---|---|---|
| Upper layer | Lower layer | ||
| 1 | 4.16 ± 1.7 | 4.88 ± 2.5 | 1.64 ± 1.4 |
| 2 | 6.11 ± 2.7 | 5.47 ± 3.5 | 1.67 ± 1.1 |
| 3 | 4.86 ± 1.6 | 3.15 ± 0.6 | 1.24 ± 0.3 |
| 4 | 4.31 ± 1.4 | 3.88 ± 1.6 | 1.42 ± 0.8 |
| 5 | 4.94 ± 2.1 | 3.79 ± 1.4 | 1.96 ± 1.2 |
| 6 | 4.81 ± 1.4 | 4.60 ± 2.2 | 2.01 ± 1.1 |
| Period | Date | LU110-01 | LU110-015 | LU110-02 | |
|---|---|---|---|---|---|
| Control efficacy | Tillering stage | 1d | 84.8 ± 4.3 a | 80.3 ± 5.6 a | 81.4 ± 4.9 a |
| 7d | 89.4 ± 4.7 a | 74.4 ± 9.8 ab | 67.6 ± 19.9 b | ||
| Flowering stage | 1d | 23.6 ± 12.7 a | 32.0 ± 11.3 a | 21.2 ± 27.5 a | |
| 7d | 90.8 ± 8.4 a | 78.3 ± 12.7 ab | 58.5 ± 18.9 b | ||
| dropping rate of insects | Tillering stage | 1d | 93.7 ± 1.3 a | 92.2 ± 1.7 a | 91.4 ± 2.0 a |
| 7d | 94.8 ± 1.1 a | 88.2 ± 2.3 ab | 84.7 ± 6.5 b | ||
| Flowering stage | 1d | 42.6 ± 9.5 a | 48.9 ± 8.5 a | 40.8 ± 20.7 a | |
| 7d | 88.9 ± 10.2 a | 73.5 ± 15.4 ab | 49.4 ± 23.1 b |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.; Lan, Y.; Huang, X.; Qi, H.; Wang, G.; Wang, J.; Wang, L.; Xiao, H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy 2020, 10, 303. https://doi.org/10.3390/agronomy10020303
Chen P, Lan Y, Huang X, Qi H, Wang G, Wang J, Wang L, Xiao H. Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy. 2020; 10(2):303. https://doi.org/10.3390/agronomy10020303
Chicago/Turabian StyleChen, Pengchao, Yubin Lan, Xiaoyu Huang, Haixia Qi, Guobin Wang, Juan Wang, Linlin Wang, and Hanxiang Xiao. 2020. "Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle" Agronomy 10, no. 2: 303. https://doi.org/10.3390/agronomy10020303
APA StyleChen, P., Lan, Y., Huang, X., Qi, H., Wang, G., Wang, J., Wang, L., & Xiao, H. (2020). Droplet Deposition and Control of Planthoppers of Different Nozzles in Two-Stage Rice with a Quadrotor Unmanned Aerial Vehicle. Agronomy, 10(2), 303. https://doi.org/10.3390/agronomy10020303