1. Introduction
During the cultivation of pome fruit, apples and pears need to be harvested, sorted, and handled in various processes. Currently, the majority of these processes require a vast amount of manual labor. Combined with the structural and further increasing shortage of seasonal workers, innovation in this field is crucial. Transition to automated processes could provide a solution; however, a challenging aspect of this automation is the manipulation of the fruit itself. Hence, the search for an appropriate gripping tool for this application will be essential. To deliver high-quality fruit to the consumer, both harvesting and processing pome fruit demand a considerable amount of care, as they are fragile products. However, besides this soft touch, a firm grip is still necessary to complete tasks such as harvesting. Consequently, the development of a usable gripper for fruit picking involves a delicate balance between gripping success and not harming the fruit.
Verbiest et al. [
1] reviewed the current state of the art regarding the automation of the entire cultivation chain of pome fruit, presenting an overview of the advancements made in the last two decades. Most research focused on the development of robotic harvesting machines, whereby the manipulator and its gripping tool was only one element of the total development, being investigated to a lesser extent. Considering the challenges of the manipulator, the majority of these projects report issues regarding the speed and cost of the used robot. Instead of using a six degrees of freedom (6DOF) robotic arms like [
2,
3,
4], or cartesian robots like [
5,
6], it is important for further research that alternative manipulators for robotic harvesting should be investigated to guarantee the profitability of the harvesting platform.
However, this paper focusses on the gripping tool, and its challenges, itself. The results considering the gripping tools used in existing research were analyzed as a starting point for this study.
Already in 2004, Setiawan et al. [
7] developed a gripper for apples based on an inflatable bellow principle, which first encloses the apple before it inflates to grip the fruit on multiple points. Using the same concept of total enclosure, Li et al. [
8] and Wang et al. [
9] both have recently developed an origami-inspired gripper for multi-purpose robotic soft gripping. Both Baeten et al. and the company Abundant Robotics used a custom-made suction cup to harvest apples [
2,
5]. Petterson et al. developed a Bernoulli gripper that can adapt to 3D objects [
10]. In contrast to the suction cup principle, Onishi et al. [
3] used a three-fingered gripper with yaws that enclose the fruit on multiple sides. This is comparable to the three-fingered gripper of Davidson et al.; however, the latter integrated an extra compliant mechanism to enclose the apple depending on its shape [
11,
12,
13]. Although it was for sweet peppers instead of pome fruit, Eizicovits et al. [
14] developed a soft gripper with four finray jaws, which has a compliant mechanism as well. The last gripper taken into account in this study is the two-jaw gripper with active force control based on built-in pressure sensors developed by Zhao et al. [
15]. Other gripping methods for agricultural application were reviewed by Li P. et al. [
16] and Blanes et al. [
17]. More generic review papers on the topic of grippers provide a wider view of recent developments in this area [
18,
19,
20].
In contrast to the previously mentioned grippers, which are all customized gripping designs, the robotic industry offers a wide spectrum of standardized grippers that can be used for several applications. This study involves a benchmark of nearly all relevant gripping principles, considering customized as well as standardized grippers for the application of robotic pome fruit manipulation. An overview of the tested grippers and a description of the testing protocol are further described in
Section 2. Within the tests, all grippers were compared based on the following aspects: gripping success, the ability not to harm the fruits, and energy consumption. These results and the accompanying discussion can be found in
Section 3. Finally,
Section 4 concludes with a broad summary of the performed benchmark study and deliberates some tracks for future work.
2. Materials and Methods
2.1. Gripping Principles
According to Monkman et al. and Shintake et al., the benchmarked grippers can be divided into two categories as follows: impactive based grippers and astrictive pneumatic suction-based grippers [
20,
21]. The impactive based grippers generate a gripping force by either friction or form closure of the gripping elements (fingers) contacting the object. The astrictive based grippers generate a gripping force through the creation of a negative pressure field between the gripper and the object. Both categories can be divided further into subcategories, based on the design of the fingers and the method of vacuum generation.
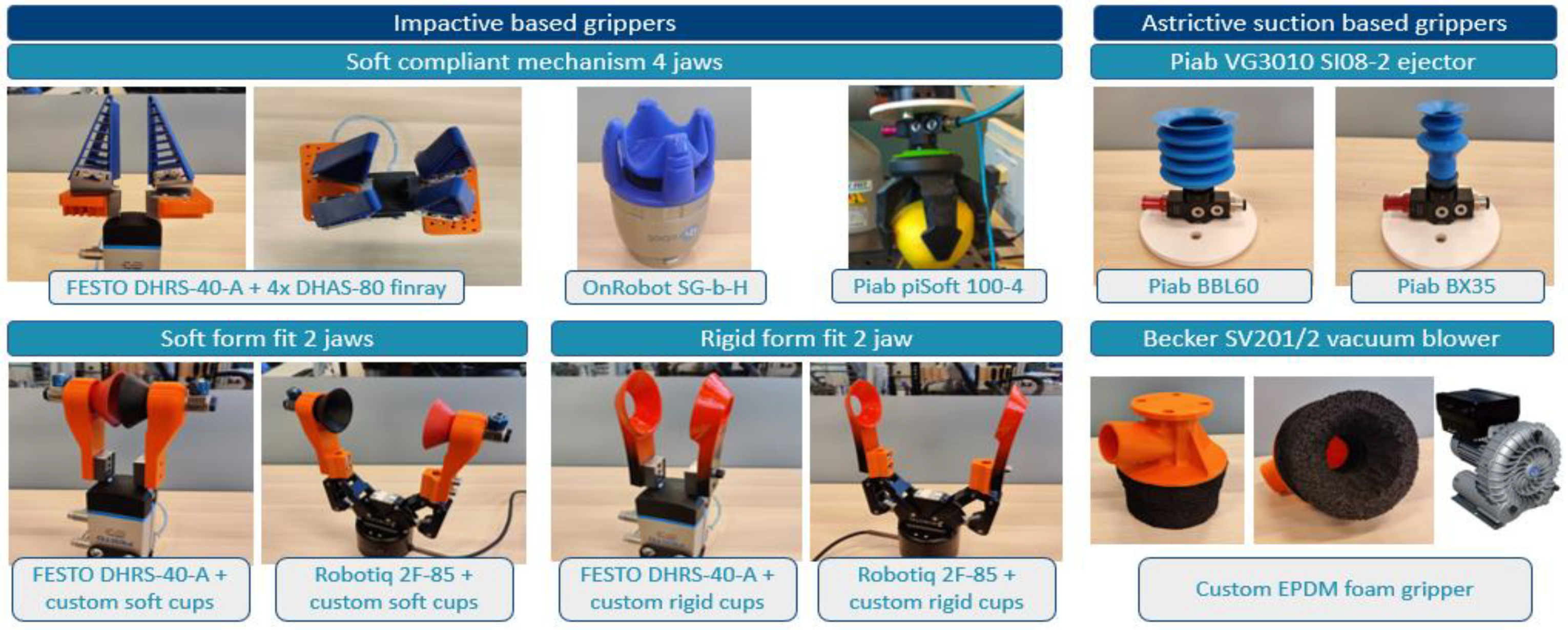
Figure 1 below provides an overview of the range of tested grippers. The dark blue boxes indicate the gripper category, the light blue boxes indicate the finger design or type of vacuum generation, and the grey boxes describe the basic components of the gripper.
Seven impactive based grippers were evaluated in this study, which can be divided into three groups. The first group consisted of three grippers with fingers, made of a soft compliant mechanism that adapted to the shape of the object through the actuation force. The FESTO and Piab based grippers were pneumatically powered using angular actuators and a vacuum ejector, respectively. On the contrary, the OnRobot gripper was electrically powered. The three previously mentioned grippers solely consisted of standard industrial parts, however, the Piab piSoft was a prototype sample at the moment of the tests. Differently, the four grippers of the next two groups were equipped with two custom-made cone shaped jaw designs with a soft and a rigid contact surface, respectively. The soft design was created by mounting two cone shaped silicone suction cups with a diameter of 50 mm on the fingers, while the rigid design has a similar 3D printed cone shape coated with a plastic layer, creating a smoother and more clutching surface. Both cone shaped finger designs were mounted on a pneumatic (FESTO), as well as an electric (Robotiq) actuator.
Besides the seven impactive based grippers, three astrictive suction-based grippers were evaluated as well. The first group of astrictive based grippers was actuated by a pneumatic two stage ejector, equipped with food grade bellow shaped suction cups. The second group is actuated by an electric blower motor using a further development of the gripper described in Baeten et al. [
2] as a large custom suction cup. This suction cup consisted of a 3D-printed mount and a thick EPDM foam, with a 100 mm diameter and 60 mm height, with a conical cut out in the center.
While the grippers using the FESTO DHRS-40-A actuator or Piab VGS3010 were powered by pressurized air, the custom foam gripper’s blower was powered by 3-phase power. All other grippers were powered on 24V DC power.
2.2. Grasping and Damage Assessment—Testing Protocol
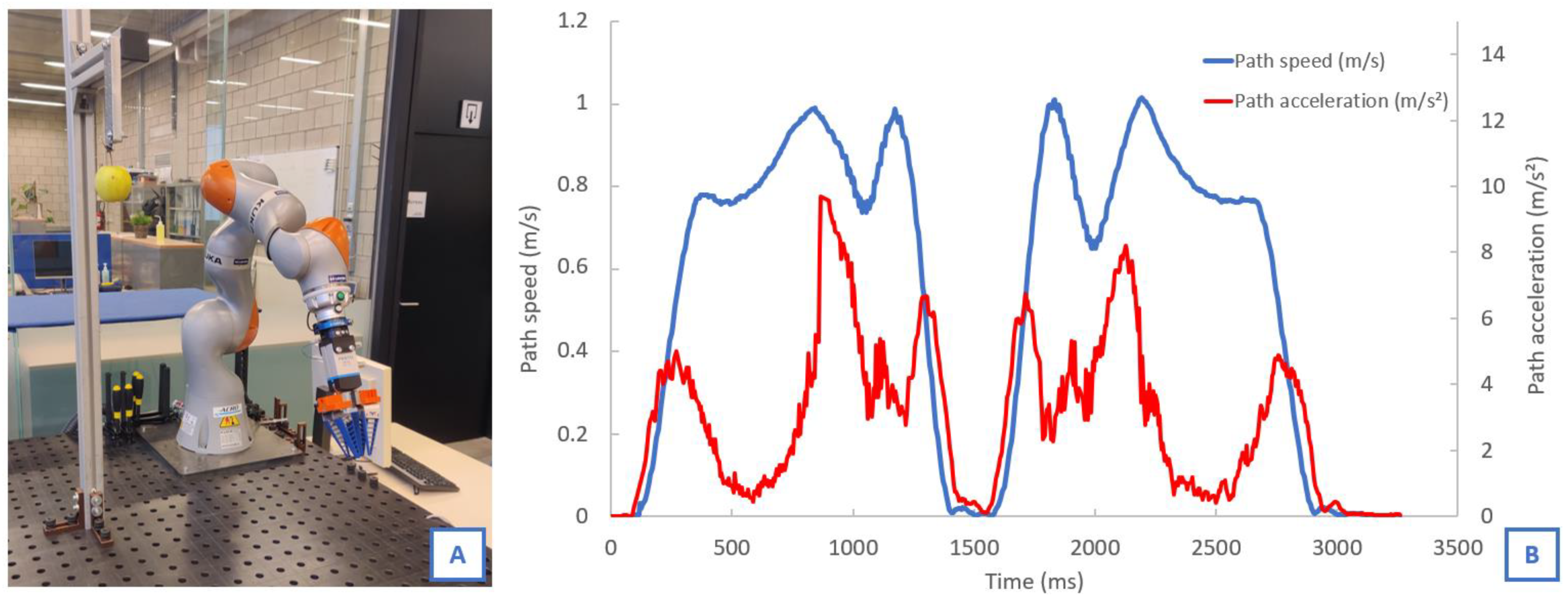
The primary required characteristics of the above-mentioned grippers are the ability to grasp the fruits successfully, without causing any damage to the fruits. These parameters will be evaluated through the execution of a simplified harvesting operation in a controlled environment. The used testing setup is shown in
Figure 2A.
The setup consisted of an industrial robot placed next to an aluminum construction at which fruits were placed by their stem using a friction fit clamp, representing the fruits attached to the branch of a tree. The robot, more specifically a KUKA iiwa 14 R820, was equipped with the tested grippers.
The testing sequence was executed as follows: (I) The fruits were manually hung from the aluminum construction on a fixed location. (II) The robot moved into a manually defined fixed picking position diagonally below the fruit, closed the gripper, and performed a slow vertical downward motion to harvest the fruit. (III) If this picking operation was executed successfully, the robot performed an acceleration test, which was defined by the movement in both directions along a path consisting of a horizontal movement of 620 mm followed by a downward vertical movement of 370 mm. The transition between these two segments was rounded off with a radius of 130 mm. The velocity and acceleration of the end effector along the path are displayed in the graph below (
Figure 2B). The execution of a testing sequence can also be viewed in the following video
https://www.youtube.com/watch?v=X5UT_sGr8x0&ab_channel=ACRO-KULeuven (accessed on 15 September 2021).
For the simplified picking setup, a straight pull was enough to pick the fruits. Although it was on plums, this straight-in straight-out picking technique was tested by Brown and Sukkarieh [
4], reporting no extra damage to fruits. However, for pome fruit, a straight pull would mostly damage the stem, whereby the storage life of the fruit would not be guaranteed. Therefore, in realistic scenarios, a more complex picking sequence could be introduced to imitate manual picking. This sequence included an angular movement before pulling the fruit of the branch. This sequence wound not cause any extra damage to the fruit, or the stem, as proven by both Baeten et al. [
2], and Brown and Sukkarieh [
4], who both used this picking sequence in their robotic harvesting tests.
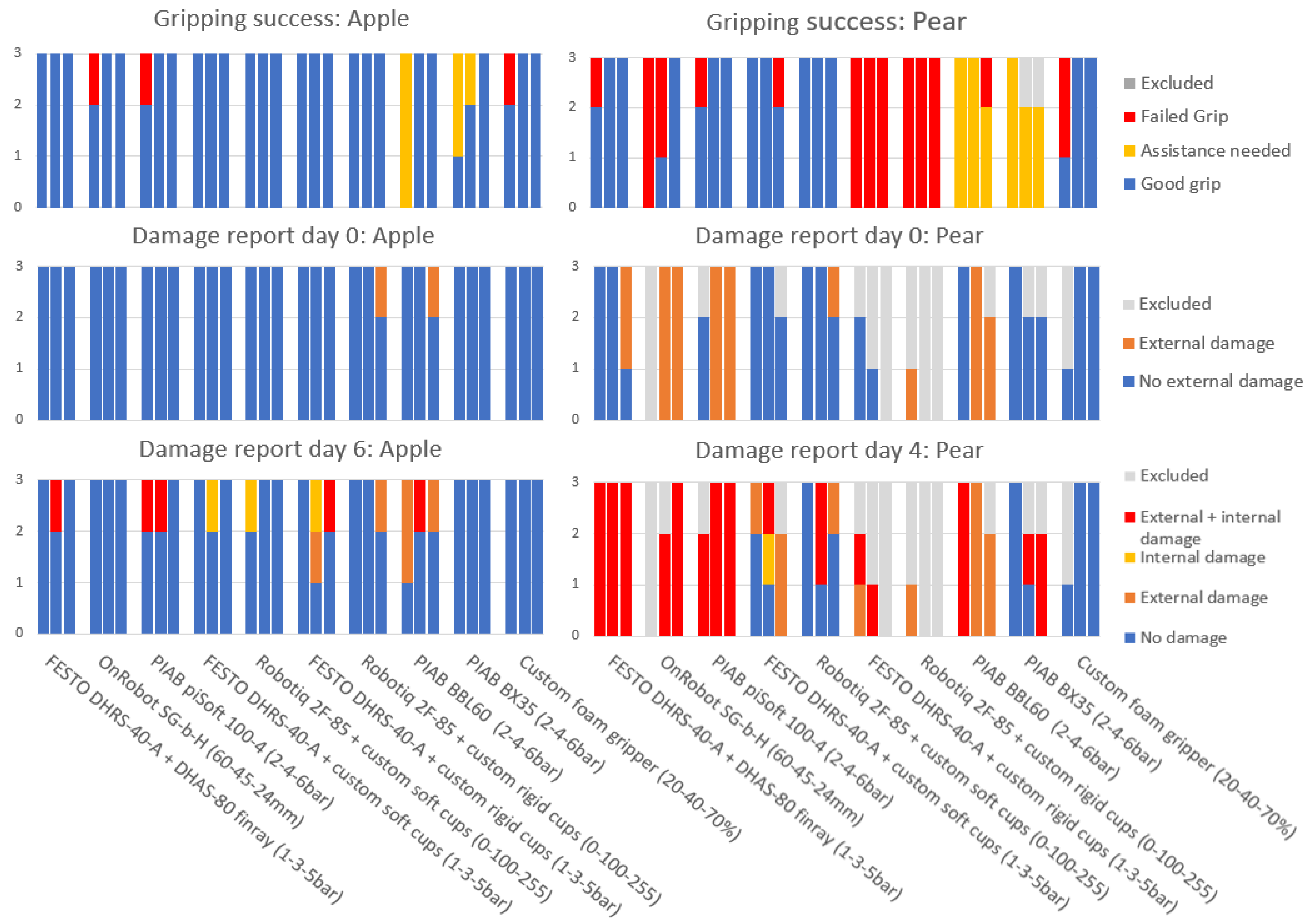
This testing sequence was performed on each gripper for both apples (Cultivar: Golden Delicious) and pears (Cultivar: Conference) on three gripping force settings and each of these tests was repeated thrice for validation (
Figure 3). This resulted in nine tested apples and nine tested pears per gripper. The three gripper force settings were set at the lower range, midrange and maximum range of the manipulation tools force range and are described for each tool in
Figure 3. The repetitions of each testing scenario had to be reduced to three tests due to the combination of a large range of testing scenarios, the absence of sufficient testing subjects with consistent characteristics, and the limited duration over which the tests could be executed. This time span needed to be minimized to limit the variation in the condition of the fruit, which could change rapidly due to the fruit being untreated. Despite the reduced number of repetitions, which limits the statistical relevance, the testing results still provide relevant insights in the capabilities of the manipulation tools as clearly defined patterns further described in
Section 3. A larger testing batch for the best performing tools will be a subsequent step in future work. The actuation speed of the grippers was minimized, reducing the impact force of the closing gripper. Thus, the damage caused to the fruits could be evaluated as solely influenced by the grippers’ design and the gripping force. The fixed gripping position in combination with the size and shape variation of the fruit caused some planned deviation from the ideal gripping position. This deviation gave useful insights regarding the grippers’ abilities to cope with similar realistic scenarios, such as moving branches or detection errors.
The gripping success was determined based on the grippers ability to successfully grasp, harvest, and hold on to the fruit during the testing sequence. The damage caused to the fruits was examined on two discrete moments in time. Initially the presence of externally visible damage was evaluated immediately after the above-mentioned testing sequence. Next, the harvested apples and pears were stored for respectively six and four days at room temperature. This storage time made smaller defects and internal damage more easily perceivable by the human eye through discoloration or local decay. Subsequently, the presence of damage was evaluated a second time, examining the fruits outside as well as inside through cross-sections. On advice of the Flemish institution for fruit cultivation Research Center (pcfruit) npo, no further classification regarding the magnitude and type of damage was made in this evaluation. Due to the high variety of these parameters and the highly variable threshold of the allowable damage, depending on the usage of the fruits, this would only have resulted in a subjective classification.
2.3. Energy Consumption
Besides the characteristics regarding the grasp quality, the power usage of each gripper was also determined for the following simulated harvesting scenario. The grippers would perform a picking operation where the movement between the pick and drop location would last 5 s in each direction. Between these movements the gripper executed a pick and release action of which the time was determined for each of the grippers individually. These picking and release actions were performed on the settings as described in the
Section 2.1.
The grippers benchmarked in the study can be divided into two different categories when determining their energy consumption based on the source of the energy. The first category is powered by electric energy, such as in the electrical motors of the OnRobot and Robotiq grippers or the blower motor of the custom foam gripper. The grippers of the second category, including the Festo actuator or the Piab ejector, are pneumatic powered.
The power consumption of the first category was measured using a DC current probe in combination with a digital oscilloscope in the case of the Robotiq and OnRobot grippers, and with a 3-phase power analyzer (Chauvin Arnoux C.A 8335) in the case of the custom foam grippers’ blower motor. The power consumption of the second category was calculated with Equation (1), using the air consumption stated on the datasheets. Only the power used by the actuators or blower motor was taken into account, in order to exclude all inefficiencies due to transformer losses, switching power supplies, or pressurized air generation and air distribution, since their presence depends on the construction and design of the whole automated setup.
where
Pa is the atmospheric pressure;
Pu the upstream pressure; and
Q, the flow rate in the standard state. This equation thus converts the upstream pressure and flow rate into energy(W).
3. Results and Discussion
3.1. Grasping and Damage Assessment
The summarized results of the grasp and damage assessment are displayed for each fruit type in three graphs on
Figure 3. The first graph displays the gripping success for each of the grippers and this for their three respective force settings. The other two graphs display the damage assessment results on the two discrete evaluation moments. In addition to these summarizing graphs, some remarkson observations during testing and damage assessment, are given specifically for each gripper.
With regards to the damage assessment the following notes should be made. The state of the tested apples was comparable to the state during the harvest, whereby the damage results of the apples were representative to a realistic situation. On the contrary, the pears were purposely very ripe, increasing their susceptibility to being damaged and magnifying the minor differences between the tested grippers. Consequently, these results should rather be used for a relative comparison between the grippers and not absolute for the harvesting of pears. Failed gripping attempts could also render the fruits unfit for damage assessment causing a large set of excluded pears.
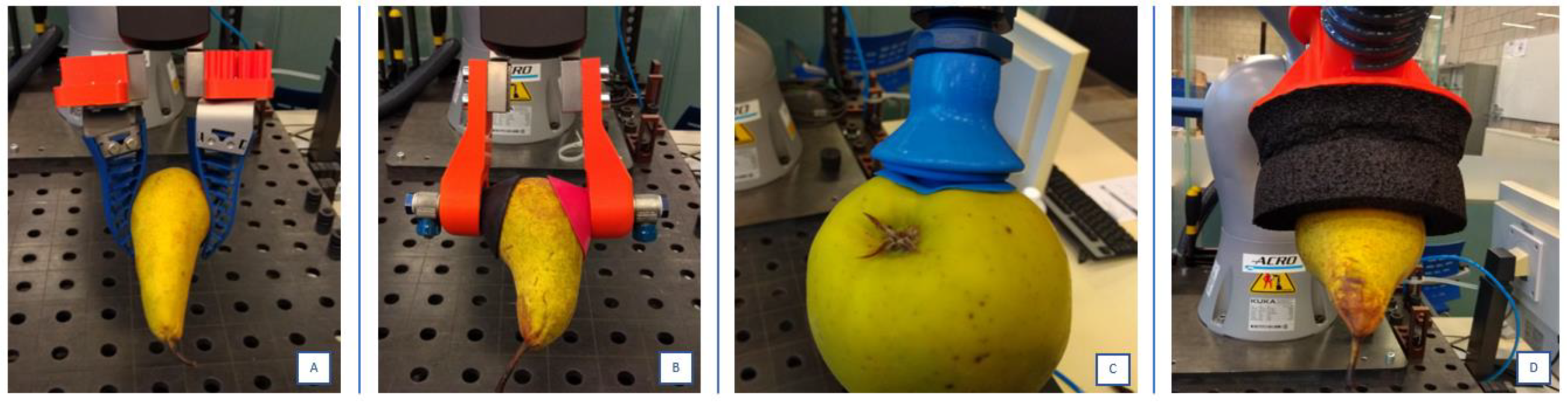
3.1.1. FESTO DHRS-40-A + DHAS-80 Finray
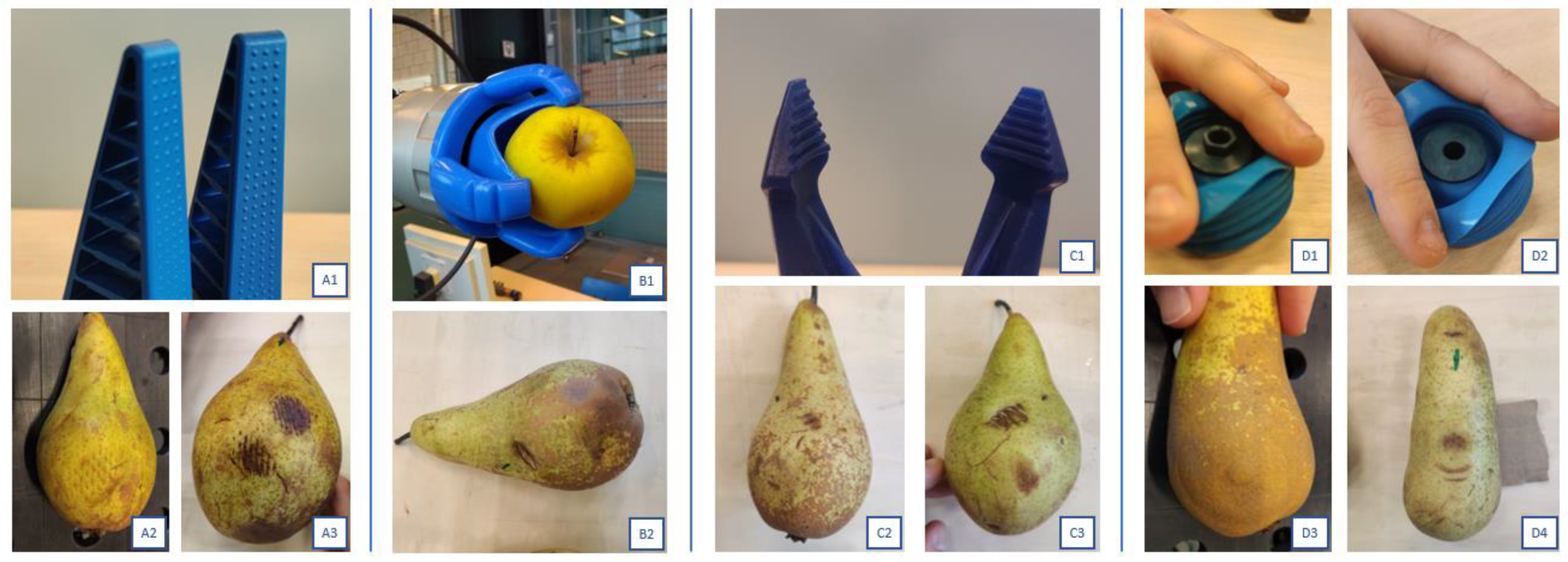
The finrays on the pneumatic actuator performed well both on gripping success and damage assessment when picking apples. In the case of gripping pears, a similar result was observed regarding the gripping success. Immediate damage was only present on the highest force setting. After the storage time of four days, extra damage on all force settings was detected, caused by the textured gripping surface of the finrays, which was imprinted on the pears (
Figure 4A).
An additional trial was made using the smooth side of the finray fingers. A similar number of injuries were noticed during this trial. This could be induced by a combination of two phenomenon. The first could be the less spherical shape of the picking position on the pears resulting in an uneven distribution of force between the finray fingers. The second could be that the finrays did not completely deform to the shape of the fruit due to the lower gripping force setting, distributing the gripping force over a smaller area. Furthermore, this also resulted in a grip that was more based on force rather than the intended form fit, which is considered less secure. At higher force settings the finrays would properly adapt to the fruits (
Figure 5A), however, at this setting the sheer magnitude of the force became the damaging factor.
3.1.2. OnRobot Sg-b-H
The OnRobot soft gripper achieved satisfactory results handling the apples. However, for the larger specimens, the gripper’s soft mechanisms were observed to be too shallow, turning the intended form fit grip into a less secure friction fit. In contrast to apples, a range of issues were observed with the pears. The OnRobot soft gripper is not inherently force but position controlled. The force is generated by the deformation of the compliant soft mechanism. This causes the actual gripping force to be equally influenced by the setting as well as the size object itself, resulting in a range of bad gripping attempts on the smaller pears at the lower force settings. Hence, these bad results could partially be assigned to user errors.
When gripping any other object, with non-ideal dimensions for the gripper’s design, the gripper’s fingers often curled up putting all their clamping force on a small area as shown in
Figure 4B. Additionally, the non-spherical shape in the gripping location of the pears caused an uneven force distribution between the gripper’s fingers, which even enlarged the previous point contact issue. Better results could be achieved if the fruit could be approached from directly below, however, this gripping pose is in reality unachievable for both harvesting and sorting operations.
For creating an ideal grasp with this gripper, a simultaneous movement towards the object, while closing the gripper, could be executed to compensate the movement of the soft mechanism. Additional tests indicated this could partially compensate the previously mentioned bad grasps caused by the gripper’s shallowness.
3.1.3. Piab piSoft 100-4
The tests with the Piab piSoft gripper resulted in decent gripping success for both apples and pears. However, the ribbed design of the gripper tips (
Figure 4C) was observed to be detrimental for handling both pome fruits, creating small areas of high contact force and thus causing damage. This effect was especially noticeable on the more sensitive pears.
Similar to the symmetrical four-fingered design of the tested OnRobot gripper, this design was observed to be disadvantageous when gripping the nonspherical shape of the pear from diagonally below, causing extra injuries due to non-ideal gripping point placement and force distribution.
3.1.4. Custom Soft Cups (FESTO DHRS-40-A and Robotiq 2F-85)
This grippers’ design performed well on both the gripping success and the immediate damage assessment through good adaptation to the fruit’s shape (
Figure 5B). Despite the soft contact interface of the suction cups, injuries due to a too high contact force were observed for the pears after the four-day storage at room temperature. The implementation of a more deformable suction cup could reduce the damage these fingers cause to the more sensitive fruit, by better distributing the contact force.
The gripper’s design could also facilitate a combined gripping principle by turning on the suction cups for extra gripping force. This feature was not implemented as the impactive grip was already adequate and the extra upgrade would only create extra energy consumption and an extra source of potential damage (suction spots).
3.1.5. Custom Rigid Cups (FESTO DHRS-40-A and Robotiq 2F-85)
The gripping success of the apples was comparable to the above mentioned custom soft cups alternative. In contrast, none of the pears were gripped successfully, because the grippers could not close far enough to completely fixate the pears. This was caused by heat deformation of the cups during the application of the soft substrate. As the cups were rigid, the lacking ability to adapt in case of a non-ideal gripping position resulted in an increased number of damaged fruits compared to the custom soft cups.
3.1.6. Piab BBL60 and Piab BX35
Since both industrial suction cups have a similar design, their gripping success was also similar. When approaching for the grip, these suction cups need to be pushed against the fruit to deform themselves and create a successful seal, since, due to the rather low suction rate, no large gaps can be bridged to attract the fruits. However, the force needed for this deformation was in the majority of cases too high, resulting in no more than pushing away the fruit without completely sealing the vacuum. When this occurred during testing an intervention was made by applying a manual counter force preventing the fruits from being pushed away. These scenarios are displayed in
Figure 3 with the specific designation “assistance needed”. Therefore, these grippers are not advised to be used for harvesting operations but rather for sorting or packaging activities. In these applications their ability to grip fruits surrounded by other fruits or other machine elements close to them becomes an advantage. A slight edge could be given to the BX35 cup that has a better chance of finding a good gripping spot due to its smaller size and thinner and more flexible sealing lip, adapting better to the fruits’ irregularities (
Figure 5C). This advantage however comes at the cost of lower stability during movement and a higher chance of a collapsing suction lip during gripping.
Both suction cups created suction spots on the pears that became especially observable after the storage time. Additionally, the BBL60’s connector design could leave an impression on both fruit types when they were sucked up against it. Modifications made to the suction cups connector, shown in
Figure 4D slightly alleviated this. Similar impressions were not observed with the BX35 since the fruits are only sucked into the soft bellow and will never make contact with the suction cups connector.
3.1.7. Custom Foam Suction Cup
The custom foam gripper was able to nearly grip all apples and pears, and of these successful grips, no fruits were damaged. Unsuccessful grips only occurred on the lower power setting where the suction force was not high enough the suck in the fruits and deform the foam to ensure a good seal (
Figure 5D). Still, the higher suction rate gave this gripper the ability to overcome larger gaps between the fruits and seal thus eliminating the assistance the other astrictive based designs needed. Moreover, no suction spots could be observed due to the lower vacuum level.
3.2. Electrical vs. Pneumatic Force Control
When comparing the pneumatic FESTO actuator to the electrical Robotiq actuator, both equipped with the same fingers (the custom soft cups or the rigid cups), their gripping force setting should not be compared directly, since the force ranges of both grippers do not match. Adjusting for this mismatch, a slight advantage could be given to the electric Robotiq, based on the lower number of damaged fruits.
The scaling of this advantage with regards to the gripping speed will depend on the used gripper fingers. The gripping force measurement curves of the gripper’s datasheet [
22] (p. 60) indicate that the lower forces will not be sustained at the higher speed settings when gripping a rigid object with rigid gripper fingers. This is probably caused by the absence of reaction time for the force control system when two rigid objects contact each other. The addition of the soft deformable custom suction cup fingers will result in a better control over lower gripping forces on higher speeds at the cost of an overall lower achievable gripping [
22] (pp. 61–62). This could be improved upon through the use of even softer contact elements ref PU graph. In contrast, the clamping force of the pneumatic actuators is mostly dependent on the supplied air pressure. All achievable speeds with this supplied air pressure will theoretically result in the same gripping force. Aside from the effect of the grasping speed on the controllability of the grasping force, the impact force will increase for both drive mechanisms. As indicated in
Section 2, this impact force has been excluded in this study.
The gripping force of the pneumatic actuators might be less influenced by the actuation speed but depends in the case of the radial actuator design of the FESTO DHRS on the size of the gripped object. In the current finger design this results in a higher clamping force the smaller the gripped fruit is. This effect could be reversed through the adaption of the gripper’s fingers so the working area of the actuator is between 50° and fully open. The effect could also be eliminated using a parallel actuator at the cost of a substantial reduction in grippable object sizes. The electrical actuation of the similar radial base actuator of the tested Robotiq gripper was not affected by the object’s size.
3.3. Power Consumption Results
Table 1 shows the results of the power consumption measurements for each of the actuators. The vacuum blower used for the custom foam cup was observed to be the main outlier having an energy consumption of a factor 10 to 350 larger than the other actuators. As expected, the large suction rate of the vacuum blower that resulted in good gripping results, forms also its main disadvantage when determining energy consumption. Aside from the high amount of energy needed to generate the required high flow rate, the need for the blower to be continuously active, due to its slow ramp up and down rate, also contributed to this high energy demand. The second highest energy consuming actuator was the Piab pneumatic ejector. Similar to the blower, the ejectors need to run continuously during the gripping process, which consumes a large volume of compressed air. The OnRobot gripper used substantially less power than the previous actuators. However, its consumption was notably higher than the other electric actuator, both using more power during the actual actuation, and a higher than idle power to hold the object during transport. The last two actuators FESTO DHRS-40-A and Robotiq 2F-85 consumed nearly the same amount of power. The FESTO actuator only consuming compressed air during the actual actuation of the fingers. The Robotiq mainly used power during actuation, supplemented by a small idle consumption of the electronics.
Since the energy consumption was determined for a simulated scenario, the ratio between the grippers might shift due to a related shift in the ratio of gripping, transport, and idle time. An increase in transport or idle time would benefit the pneumatic FESTO DHRS-40-A actuator and in a lesser degree the Robotiq 2F-85.
These results need to be evaluated in perspective to the rest of the automation setup. The low power consumption of the DC powered electrical actuators will be beneficial for the use on smaller battery powered autonomous platforms. Additionally, no other energy conversions would be required in these setups. Otherwise, for off-orchard processing processes or larger fossil fuel powered autonomous platforms, the availability of power becomes a minor issue, and the extra cost could be justified by an increase in the performance of the gripping principal as for the custom foam gripper.
4. Conclusions
Based on the performed benchmark it can be concluded that all gripping principles are to a certain degree usable for handling apples. The damage caused to apples, however, clearly indicated the beneficial effect of a soft and smooth gripper interface. Unlike the impactive grippers, the industrial ejector driven suction cups proved to be less suited for harvesting operations, but rather for other handling operations, such as sorting or packaging. In this case, these grippers have a substantial advantage over all impactive based gripping principles, due to their ability to pick fruits surrounded by other fruits close to them, on for example a conveyor.
In contrast to apples, the tests with the ripe and oversensitive pears provided better insights in the relative differences in performance between the grippers. All three commercial impactive soft grippers were able to successfully grab the pears, when set correctly. A slight disadvantage could be given to the two symmetrical four-fingered designs, the OnRobot and the Piab piSoft, which were not able to adapt properly to the non-spherical shape of the pears in the current gripping pose. Moreover, despite their soft design, none of the industrial soft grippers were able to handle the pears without damaging them. However, minor adaptions to these grippers could make them viable for the handling of the more fragile fruits. By making the substrates of the compliant mechanisms softer, and by removing textures and other rough features, the presence of force concentrations could be reduced. Neither of the rigid custom cups were able to successfully grip any pears without damaging them. The custom soft cup fingers and industrial suction cups performed better to some degree; however, they still caused many injuries due to force concentrations or high vacuum level respectively.
The soft EPDM foam interface combined with the low vacuum level of the custom foam suction cups proved to be the best approach of the tested grippers to handle the more delicate pears. This success comes with a large drawback, a substantially higher energy consumption of the blower motor. The higher energy consumption turned out to be a disadvantage for the astrictive gripping principals in general, being on average a factor 75 higher than their impactive counterparts, the exception being the Piab piSoft. Within the impactive grippers, the results did not indicate a substantial difference in gripping success or quality between the more conventional pneumatic actuators (FESTO) and similar but newer electrical actuators (Robotiq) on the tested parameters.
Second to the grippers evaluated ability to complete the needed manipulations for a certain task without causing damage, the differentiation parameters currently are the available energy supply and control structure of the automation setup.
Not all applicable gripping principles were able to be tested in the current benchmark. Future testing might include grippers such as origami grippers [
8] that are still in research or readily commercially available Fluidic elastomeric actuators (FEA). Secondly more extensive testing should be executed on the most promising manipulation tools providing better statistic relevance with regards to, among others, variations in the testing subjects. The influence of additional gripper parameters such as variation in gripping speed on the scaling of the current results might also be evaluated.
Author Contributions
Conceptualization, G.S. and R.V.; methodology, G.S. and R.V.; software, G.S.; validation, G.S. and R.V.; investigation, G.S. and R.V.; resources, R.V.; data curation, G.S. and R.V.; writing—original draft preparation, G.S. and R.V.; writing—review and editing, G.S., R.V. and K.K.; visualization, G.S.; supervision, K.K. and E.D.; project administration, K.K. and E.D.; funding acquisition, K.K. and E.D. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Flemish governmental authority VLAIO through facilitating the TETRA-project ACROFRUIT (HBC2019.2051, 2020) on which this study depends. Additionally, R.V. is a SB PhD fellow at FWO (Research Foundation Flanders) under grant agreement 1SA9221N.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Acknowledgments
The authors are grateful for the opportunities and support of KU Leuven, Campus Diepenbeek. Moreover, the authors thank the Flemish institution for fruit cultivation Research Center (pcfruit) npo for their contribution in supplying test objects.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
References
- Verbiest, R.; Ruysen, K.; Vanwalleghem, T.; Demeester, E.; Kellens, K. Automation and robotics in the cultivation of pome fruit: Where do we stand today? J. Field Robot. 2021, 38, 513–531. [Google Scholar] [CrossRef]
- Baeten, J.; Donné, K.; Boedrij, S.; Beckers, W.; Claesen, E. Autonomous fruit picking machine: A robotic apple harvester. Field Serv. Robot. 2008, 42, 531–539. [Google Scholar] [CrossRef] [Green Version]
- Onishi, Y.; Yoshida, T.; Kurita, H.; Fukao, T.; Arihara, H.; Iwai, A. An automated fruit harvesting robot by using deep learning. Robomech J. 2019, 6, 13. [Google Scholar] [CrossRef] [Green Version]
- Brown, J.; Sukkarieh, S. Design and evaluation of a modular robotic plum harvesting system utilising soft components. J. Field Robot. 2021, 38, 289–306. [Google Scholar] [CrossRef]
- Abundant Robotics, USA–CA. 2019. Available online: https://www.abundantrobotics.com/ (accessed on 26 April 2021).
- FFRobotics, TelAviv. 2017. Available online: https://www.ffrobotics.com/ (accessed on 30 August 2021).
- Setiawan, A.I.; Furukawa, T.; Preston, A. A low–cost gripper for an apple picking robot. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 4448–4453. [Google Scholar] [CrossRef]
- Li, S.; Stampfli, J.; Xu, H.; Malkin, E.; Diaz, E.V.; Rus, D.; Wood, R.J. A Vacuum-driven Origami “Magic-ball” Soft Gripper. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7401–7408. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Guo, H.; Liu, R.; Yang, H.; Deng, Z. A programmable origami-inspired webbed gripper. Smart Mater. Struct. 2021, 30, 5. [Google Scholar] [CrossRef]
- Petterson, A.; Ohlsson, T.; Caldwell, D.G.; Davis, S.; Gray, J.O.; Dodd, T.J. A bernoulli principle gripper for handling of planar and 3D (food) products. Ind. Robot 2010, 37, 518–526. [Google Scholar] [CrossRef]
- Davidson, J.R.; Silwal, A.; Hohimer, C.J.; Karkee, M.; Mo, C.; Zhang, Q. Proof–of–concept of a robotic apple harvester. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 634–639. [Google Scholar] [CrossRef]
- Davidson, J.R.; Hohimer, C.; Mo, C.; Karkee, M. Dual robot coordination for apple harvesting. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, WA, USA, 16–19 July 2017; pp. 1–10. [Google Scholar] [CrossRef]
- Silwal, A.; Davidson, J.R.; Karkee, M.; Mo, C.; Zhang, Q.; Lewis, K. Design, integration, and field evaluation of a robotic apple harvester. J. Field Robot. 2017, 34, 1140–1159. [Google Scholar] [CrossRef]
- Eizicovits, D.; van Tuijl, B.; Berman, S.; Edan, Y. Integration of perception capabilities in gripper design using graspability maps. Biosyst. Eng. 2016, 146, 98–113. [Google Scholar] [CrossRef]
- Zhao, D.; Lu, J.; Ji, W.; Zhang, Y.; Chen, Y. Design and control of an apple harvesting robot. Biosyst. Eng. 2011, 110, 112–122. [Google Scholar] [CrossRef]
- Li, P.; Lee, S.H.; Hsu, H.Y. Review on fruit harvesting method for potential use of automatic fruit harvesting systems. Procedia Eng. 2011, 23, 351–366. [Google Scholar] [CrossRef] [Green Version]
- Blanes, C.; Mellado, M.; Ortiz, C.; Valera, A. Review: Technologies for robot grippers in pick and place operations for fresh fruits and vegetables. Span. J. Agric. Res. 2011, 9, 1130–1141. [Google Scholar] [CrossRef]
- Fantoni, G.; Santochi, M.; Dini, G.; Tracht, K.; Scholz-Reiter, B.; Fleischer, J.; Lien, T.K.; Seliger, G.; Reinhart, G.; Franke, J.; et al. Grasping devices and methods in automated production processes. CIRP Ann. 2014, 63, 679–701. [Google Scholar] [CrossRef]
- Hughes, J.; Culha, U.; Giardino, F.; Guenther, F.; Rosendo, A.; Iida, F. Soft Manipulators and Grippers: A Review. Front. Robot. AI 2016, 3, 69. [Google Scholar] [CrossRef] [Green Version]
- Monkman, G.J.; Hesse, S.; Steinmann, R.; Schunk, H. Robot Grippers; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2006; 453p. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robotiq. Robotiq 2F-85 & 2F-140 Instruction Manual. 2020. Available online: https://assets.robotiq.com/website-assets/support_documents/document/2F-85_2F-140_UR_PDF_20200211.pdf (accessed on 26 April 2021).
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}