Investigating the Effect of the Tractor Drive System Type on Soil Behavior under Tractor Tires



 , ,
, ,  and
and
Abstract
:1. Introduction
2. Materials and Methods
- = the static load on rear tires, N;
- = the drawbar height, m;
- = the wheel base, m;
- Wdf = the dynamic load on rear tires, N;
- = the static load on front tires, N;
- Wdr = the dynamic load on front tires, N;
- P = draft, N.
- m = soil mass, kg.
- = initial soil density, kg/m3.
- = initial length of longitudinal transducer, m.
- = initial length of lateral transducer, m.
- = initial length of vertical transducer, m.
- = final soil density, kg/m3.
- = final length of longitudinal transducer, m.
- = final length of lateral transducer, m.
- = final length of vertical transducer, m.
3. Results
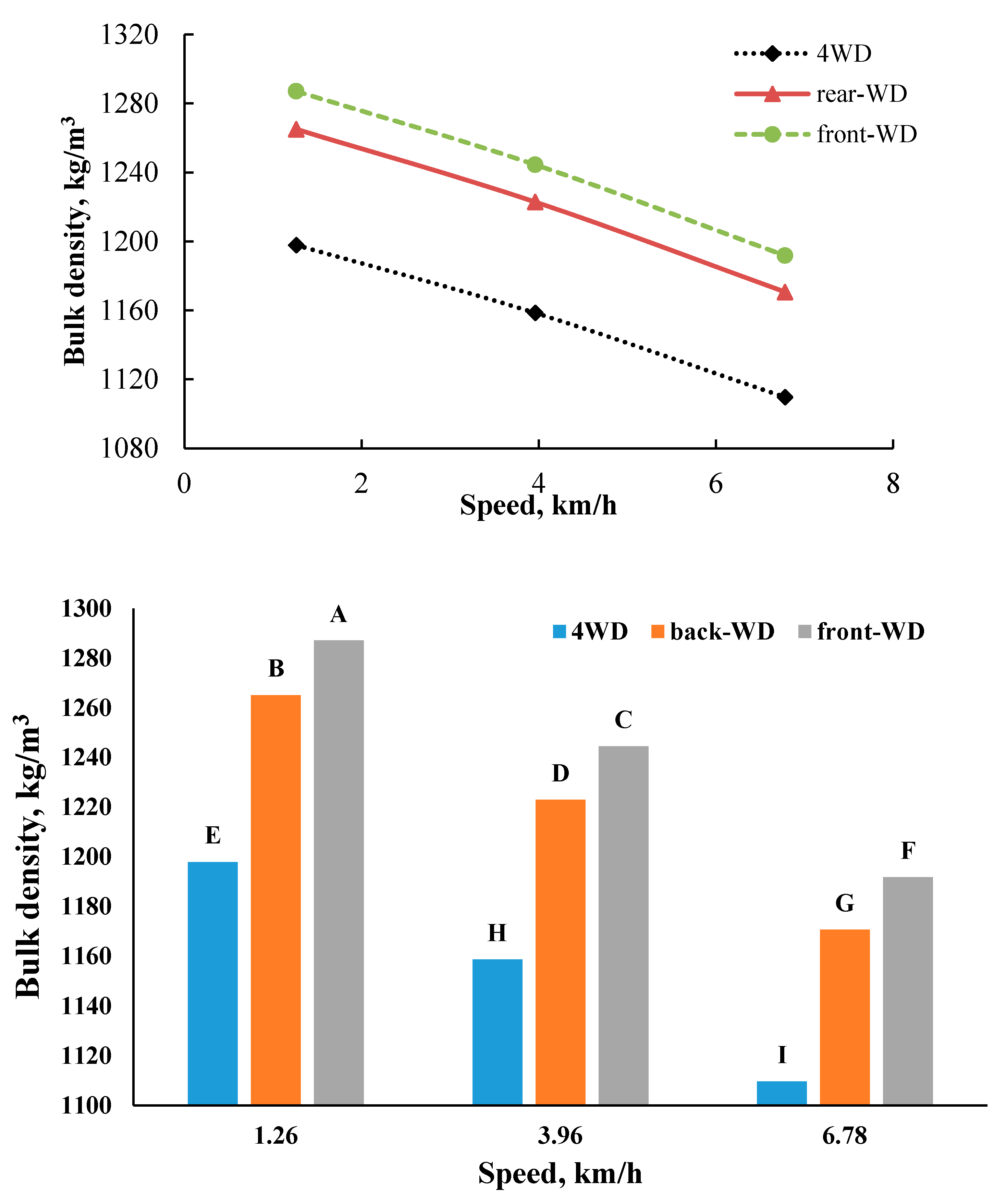
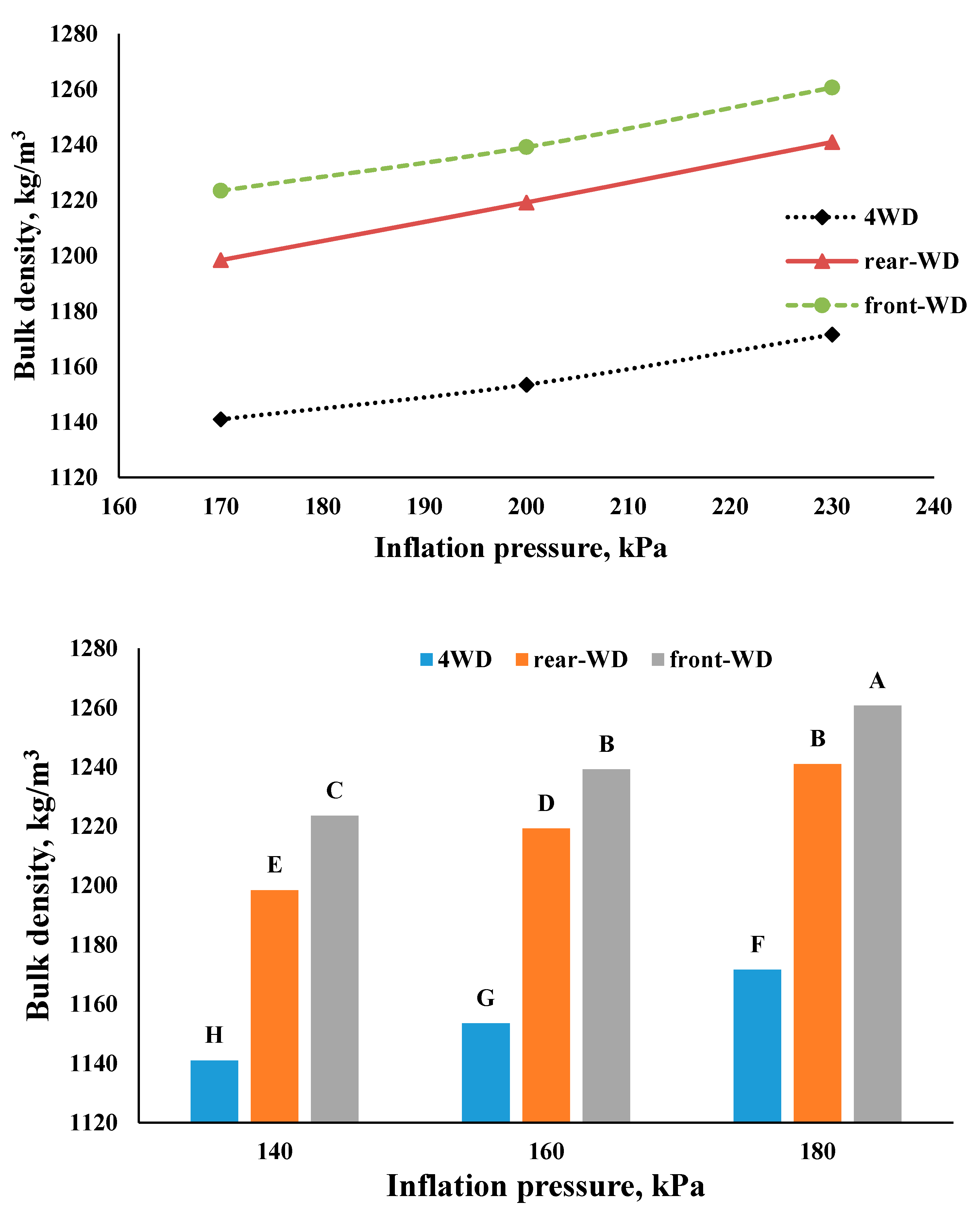
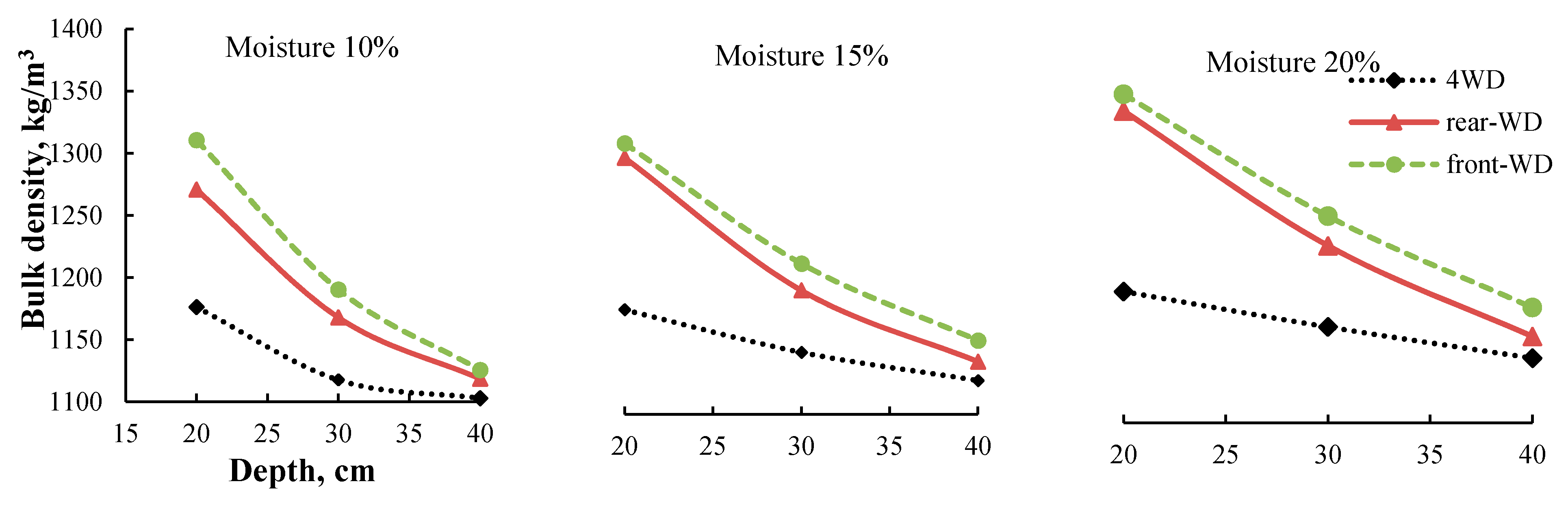
3.1. The Main Effects
3.2. The Two-Ways Effects
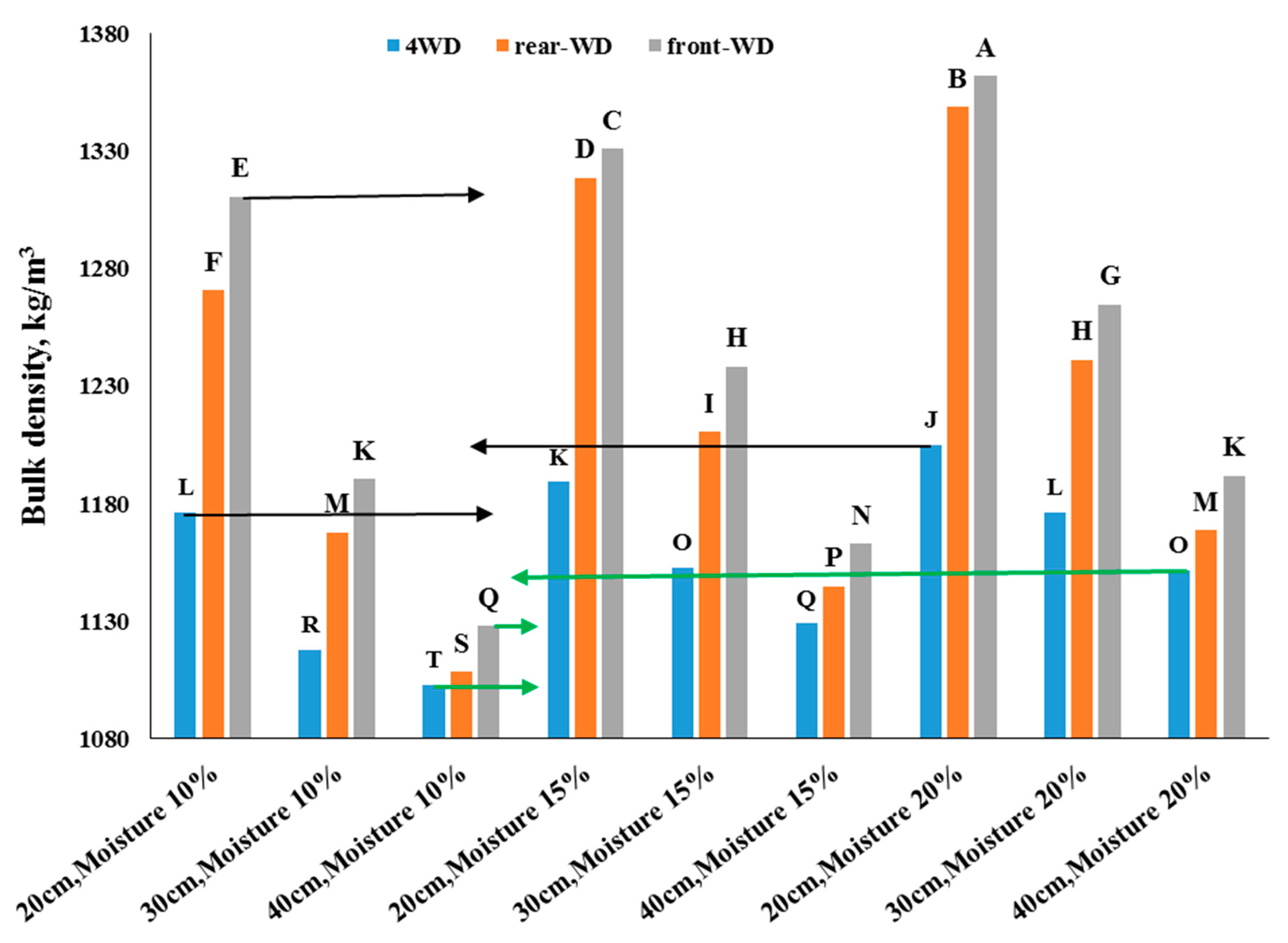
3.3. The Three-Way Interaction Effect of Parameters
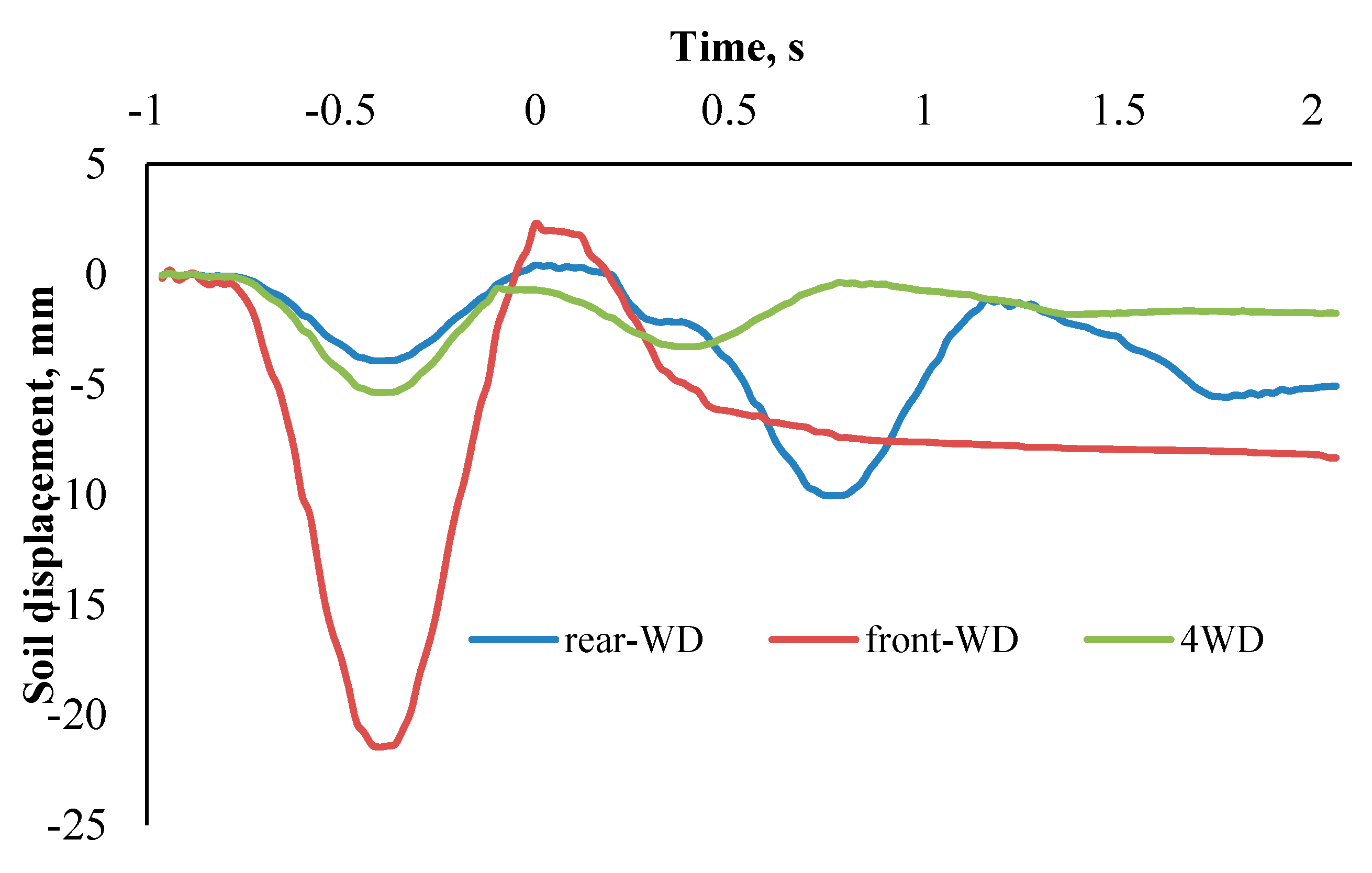
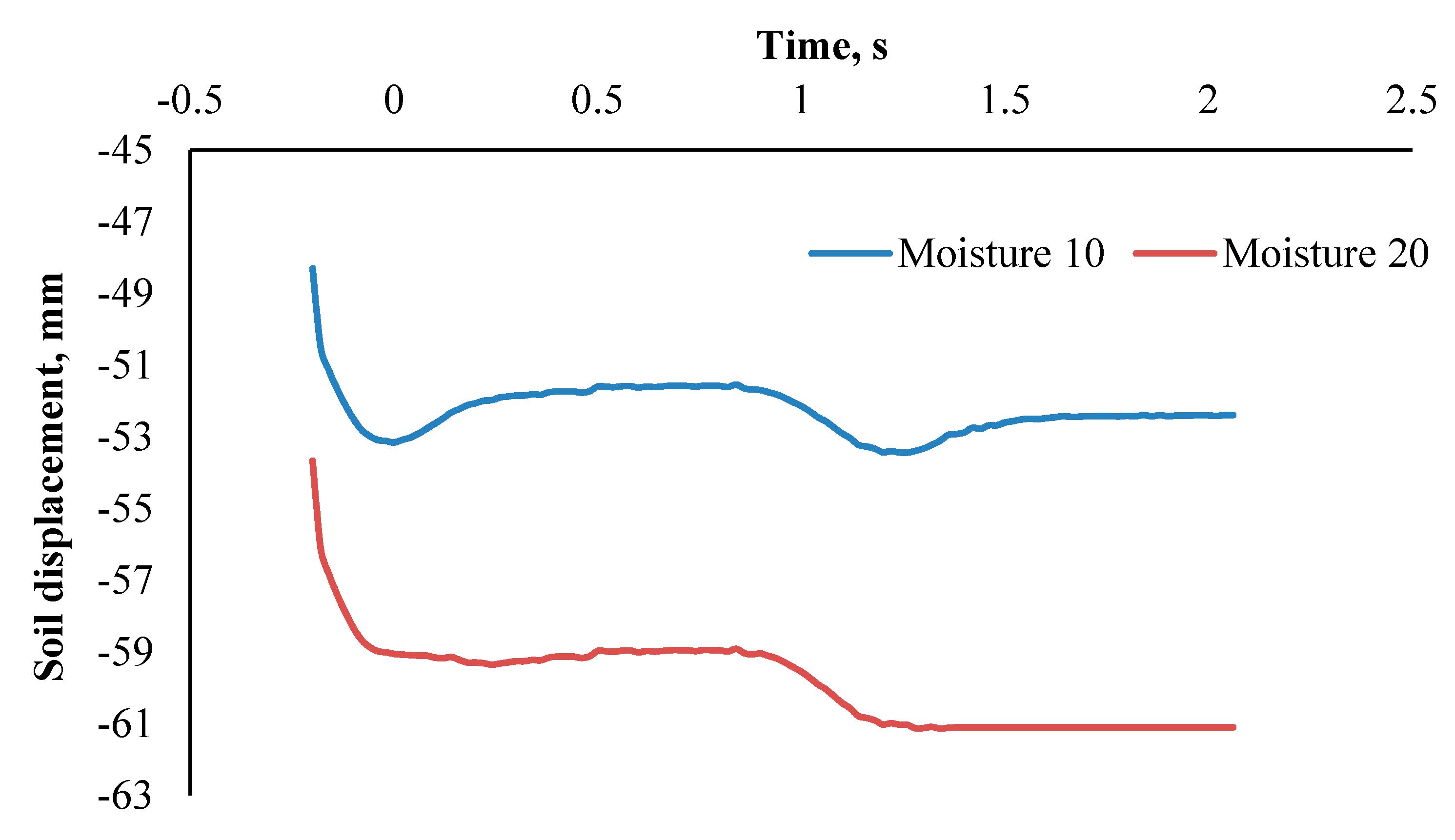
3.4. Soil Behavior in Three Coordinate Directions under the Tractor Wheels
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Keller, T.; Défossez, P.; Weisskopf, P.; Arvidsson, J.; Richard, G. SoilFlex: A model for prediction of soil stresses and soil compaction due to agricultural field traffic including a synthesis of analytical approaches. Soil. Till. Res. 2007, 93, 391–411. [Google Scholar] [CrossRef]
- Zink, A.; Fleige, H.; Horn, R. Load risks of subsoil compaction and depths of stress propagation in arable Luvisols. Soil Sci. Soc. Am. J. 2010, 74, 1733–1742. [Google Scholar] [CrossRef]
- Keller, T.; Sandin, M.; Colombi, T.; Horn, R.; Or, D. Historical increase in agricultural machinery weights enhanced soil stress levels and adversely affected soil functioning. Soil. Till. Res. 2019, 194, 104293. [Google Scholar] [CrossRef]
- Ansorge, D.; Godwin, R.J. The effect of tyres and a rubber track at high axle loads on soil compaction, Part 1: Single axle-studies. Biosyst. Eng. 2007, 115–126. [Google Scholar] [CrossRef] [Green Version]
- Arvidsson, J.; Westlin, H.; Keller, T.; Gilbertsson, M. Rubber track systems for conventional tractors–Effects on soil compaction and traction. Soil. Till. Res. 2011, 117, 103–109. [Google Scholar] [CrossRef]
- Horn, R.; Holthusen, D.; Dorner, J.; Mordhorst, A.; Fleige, H. Scale-dependent soil strengthening processes–what do we need to know and where to head for a sustainable environment? Soil. Till. Res. 2019, 195, 104388. [Google Scholar] [CrossRef]
- De Lima, R.P.; Keller, T.; Giarola, N.B.; Tormena, C.A.; da Silva, A.R.; Rolim, M.M. Measurements and simulations of compaction effects on the least limiting water range of a no-till Oxisol. Arid. Soil Res. Rehabil. 2020, 58, 62–72. [Google Scholar]
- Barik, K.; Aksakal, E.L.; Islam, K.R.; Sari, S.; Angin, I. Spatial variability in soil compaction properties associated with field traffic operations. Catena 2014, 120, 122–133. [Google Scholar] [CrossRef]
- Veronesi, F.; Corstanje, R.; Mayr, T. Mapping soil compaction in 3D with depth functions. Soil. Till. Res. 2012, 124, 111–118. [Google Scholar] [CrossRef]
- Li, H.; Schindler, C. Analysis of soil compaction and tire mobility with finite element method. Proc. IMechE Part K J. Multi-Body Dyn. 2013, 227, 275–291. [Google Scholar] [CrossRef]
- Håkansson, I.; Reeder, R.C. Subsoil compaction by vehicles with high axle load—Extent, persistence and crop response. Soil. Till. Res. 1994, 29, 277–304. [Google Scholar] [CrossRef]
- De Moura, M.S.; Silva, B.M.; Mota, P.K.; Borghi, E.; de Resende, A.V.; Acuña-Guzman, S.F.; Araújo, G.S.S.; Silva, L.D.C.M.D.; De Oliveira, G.C.; Curi, N. Soil management and diverse crop rotation can mitigate early-stage no-till compaction and improve least limiting water range in a Ferralsol. Agric. Water Manag. 2021, 243, 106523. [Google Scholar] [CrossRef]
- Rabot, E.; Wiesmeier, M.; Schlüter, S.; Vogel, H.J. Soil structure as an indicator of soil functions: A review. Geoderma 2018, 314, 122–137. [Google Scholar] [CrossRef]
- De Moraes, M.T.; Debiasi, H.; Franchini, J.C.; Mastroberti, A.A.; Levien, R.; Leitner, D.; Schnepf, A. Soil compaction impacts soybean root growth in an Oxisol from subtropical Brazil. Soil. Till. Res. 2020, 200, 104611. [Google Scholar] [CrossRef]
- Voorhees, W.B. Long-term effect of subsoil compaction on yield of maize. Adv. Geoecol. 2000, 32, 331–338. [Google Scholar]
- Van den Akker, J.J.H. SOCOMO: A soil compaction model to calculate soil stresses and the subsoil carrying capacity. Soil. Till. Res. 2004, 79, 113–127. [Google Scholar] [CrossRef]
- Bekker, M.G. Theory of Land Locomotion; University of Michigan Press: Ann Arbor, MI, USA, 1956. [Google Scholar]
- Marsili, A.; Servadio, P. Compaction effects of rubber or metal-tracked tractor passes on agricultural soils. Soil. Till. Res. 1996, 37, 37–45. [Google Scholar] [CrossRef]
- Trautner, A.; Arvidsson, J. Subsoil compaction caused by machinery traffic on a Swedish Eutric Cambisol at different soil water contents. Soil. Till. Res. 2003, 73, 107–118. [Google Scholar] [CrossRef]
- Erbach, D.C.; Kinney, G.R.; Wilcox, A.P.; Abo-Abda, A.E. Strain gage to measure soil compaction. Trans. ASAE 1991, 34, 2345–2348. [Google Scholar] [CrossRef]
- De Lima, R.P.; da Silva, A.R.; da Silva, Á.P. Soilphysics: An R package for simulation of soil compaction induced by agricultural field traffic. Soil. Till. Res. 2021, 206, 104824. [Google Scholar] [CrossRef]
- Kinney, G.R.; Erbach, D.C.; Bern, C.J. Soil strain under three tractor configurations. Trans. ASAE 1992, 35, 1135–1139. [Google Scholar] [CrossRef] [Green Version]
- Botta, G.F.; Tolon-Becerra, A.; Tourn, M.; Lastra-Bravo, X.; Rivero, D. Agricultural traffic: Motion resistance and soil compaction in relation to tractor design and different soil conditions. Soil. Till. Res. 2012, 120, 92–98. [Google Scholar] [CrossRef]
- Ansorge, D.; Godwin, R.J. The effect of tyres and a rubber track at high axle loads on soil compaction—Part 2: Multi-axle machine studies. Biosyst. Eng. 2008, 99, 338–347. [Google Scholar] [CrossRef] [Green Version]
- Patel, S.K.; Mani, I. Effect of multiple passes of tractor with varying normal load on subsoil compaction. J. Terrramech. 2011, 48, 277–284. [Google Scholar] [CrossRef]
- Shahgholi, G.; Abuali, M. Measuring soil compaction and soil behavior under the tractor tire using strain transducer. J. Terrramech. 2015, 59, 19–25. [Google Scholar] [CrossRef]
- Way, T.; Erbach, D.; Bailey, A.; Burt, E.; Johnson, C. Soil displacement beneath an agricultural tractor drive tire. J. Terrramech. 2005, 42, 35–46. [Google Scholar] [CrossRef]
- McPhee, J.E.; Antille, D.L.; Tullberg, J.N.; Doyle, R.B.; Boersma, M. Managing soil compaction–A choice of low-mass autonomous vehicles or controlled traffic? Biosyst. Eng. 2020, 195, 227–241. [Google Scholar] [CrossRef]
- Sidhu, D.; Duiker, S. Soil Compaction in Conservation Tillage: Crop Impacts. Agronomy J. 2006, 98, 1257–1264. [Google Scholar] [CrossRef]
- Martínez, G.I.; Ovalle, C.; Del Pozo, A.; Uribe, H.; Valderrama, V.N.; Prat, C.; Sandoval, M.; Fernández, F.; Zagal, E. Influence of conservation tillage and soil water content on crop yield in dryland compacted alfisol of central chile. Chil. JAR 2011, 71, 615–622. [Google Scholar] [CrossRef] [Green Version]
- Antille, D.L.; Bennett, J.M.; Troy, A.; Jensen, T.A. Soil compaction and controlled traffic considerations in Australian cotton-farming systems. Crop Pasture Sci. 2016, 67, 1–28. [Google Scholar] [CrossRef]
- Liljedahl, J.B.; Turnquist, P.K.; Smith, D.W.; Hoki, M. Tractors and Their Power Units; Wiley: New York, NY, USA, 1979. [Google Scholar]
- Stafford, J.V.; Mattos, P. The effect of forward speed on wheel induced soil compaction: Laboratory simulation and field experiments. J. Agric. Eng. Res. 1981, 26, 333–347. [Google Scholar] [CrossRef]
- Moinfar, A.; Shahgholi, G.; Gilandeh, Y.A.; Gundoshmian, T.M. The effect of the tractor driving system on its performance and fuel consumption. Energy 2020, 202, 117803. [Google Scholar] [CrossRef]
- Battiato, A.; Alaoui, A.; Diserens, E. Impact of Normal and Shear Stresses Due to Wheel Slip on Hydrological Properties of an Agricultural Clay Loam: Experimental and New Computerized Approach. J. Agric. Sci. 2015, 7, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Raghavan, G.S.V.; McKyes, E.; Chase, M. Effect of Wheel Slip on Soil Compaction. J. Agric. Eng. Res. 1977, 22, 79–83. [Google Scholar] [CrossRef]
- Botta, G.G.; Jorajuria, C.D.; Draghi, T.L. Soil compaction during secondary tillage traffic. Agro-Ciencia 1999, 15, 139–144. [Google Scholar]
- Taghavifar, H.; Mardani, A. Effect of velocity, wheel load and multipass on soil compaction. J. Saudi Soc. Agric. Sci. 2014, 13, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Arvidsson, J.; Keller, T. Soil stress as affected by wheel load and tyre inflation pressure. Soil. Till. Res. 2007, 96, 284–291. [Google Scholar] [CrossRef]
- Van den Akker, J.J.H. Prevention of subsoil compaction by defining a maximum wheel load bearing capacity. Soil Compact. Compress. Relat. Sugar Beet Prod. 1998, 1, 43–54. [Google Scholar]
- Ishaq, M.; Hassan, A.; Saeed, M.; Ibrahim, M.; Lal, R. Subsoil compaction effects on crops in Punjab. Pakistan I. Soil physical properties and crop yield. Soil. Till. Res. 2001, 59, 57–65. [Google Scholar] [CrossRef]
- Smith, C.; Johnston, M.; Lorentz, S. Assessing the compaction susceptibility of South African forestry soils. I. The effect of soil type, water content and applied pressure on uni-axial compaction. Soil. Till. Res. 1997, 41, 53–73. [Google Scholar] [CrossRef]
- Saffih-Hdadi, K.; Defossez, P.; Richard, G.; Cui, Y.; Tang, A.; Chaplain, V. A method for predicting soil susceptibility to the compaction of surface layers as a function of water content and bulk density. Soil. Till. Res. 2009, 105, 96–103. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Unit | Value |
|---|---|---|
| Engine power | kW | 30.8 |
| Dynamic weight on each front tire | kg | 554 |
| Dynamic weight on each rear tire | kg | 511 |
| Wheelbase | m | 1.055 |
| Center-to-center lateral spacing of front tires | m | 0.75 |
| Center-to-center lateral spacing of rear tires | m | 0.75 |
| Factor | DOF | Sum of Squares | Mean Square | F | p |
|---|---|---|---|---|---|
| Treatment | 242 | 5,360,000 | 22,150 | 1148 ** | 0.001 |
| Depth | 2 | 2,284,633 | 1,142,317 | 59,202.95 ** | 0.001 |
| Drive system | 2 | 966,291 | 483,145 | 25,040.03 ** | 0.001 |
| Moisture | 2 | 434,886 | 217,443 | 11,269.43 ** | 0.001 |
| Inflation pressure | 2 | 165,116 | 82,558 | 4278.74 ** | 0.001 |
| Speed | 2 | 1,047,324 | 523,662 | 27,139.89 ** | 0.001 |
| Depth × drive system | 4 | 329,490 | 82,373 | 4269.13 ** | 0.001 |
| Depth × moisture | 4 | 7445 | 1861 | 96.46 ** | 0.001 |
| Depth × tire | 4 | 48,786 | 12,196 | 632.11 ** | 0.001 |
| Depth × speed | 4 | 1474 | 368.584 | 19.10 ** | 0.001 |
| Drive system × moisture | 4 | 13,169 | 3292 | 170.62 ** | 0.001 |
| Drive system × Inflation pressure | 4 | 3183 | 795.638 | 41.24 ** | 0.001 |
| Drive system × speed | 4 | 1220 | 30.893 | 15.80 ** | 0.001 |
| Moisture × Inflation pressure | 4 | 8277 | 2069 | 107.25 ** | 0.001 |
| Moisture × speed | 4 | 6530 | 1633 | 84.61 ** | 0.001 |
| Inflation pressure × speed | 4 | 18,741 | 4685 | 242.82 ** | 0.001 |
| Depth × drive system × moisture | 8 | 5268 | 658.546 | 34.13 ** | 0.001 |
| Depth × drive system ×Inflation pressure | 8 | 5786 | 723.222 | 37.48 ** | 0.001 |
| Depth × drive system × speed | 8 | 548 | 68.456 | 3.55 ** | 0.001 |
| Depth × moisture × Inflation pressure | 8 | 2659 | 332.324 | 17.22 ** | 0.001 |
| Depth × Inflation pressure × speed | 8 | 752 | 93.99 | 4.87 ** | 0.001 |
| Drive system × moisture × Inflation pressure | 8 | 2267 | 283.41 | 14.69 ** | 0.001 |
| Moisture × Inflation pressure × speed | 8 | 732 | 91.555 | 4.75 ** | 0.001 |
| Depth × drive system × moisture × Inflation pressure | 16 | 4844 | 302.733 | 15.69 ** | 0.001 |
| Error | 486 | 9377 | 19.295 | ||
| Total | 728 | 5,369,700 |
| Moisture | Motion System | Fitted Equation | Slope at Point 1 | Slope at Point 2 | Slope at Point 3 | R2 |
|---|---|---|---|---|---|---|
| 10% | Front-WD | y = 0.2785x2 − 25.955x + 1718.3 | −14.8 | −9.24 | −3.67 | 1 |
| Rear-WD | y = 0.268x2 − 23.69x + 1637.4 | −12.9 | −7.61 | −2.25 | 1 | |
| 4WD | y = 0.2195x2 − 16.835x + 1425.2 | −8.07 | −3.69 | −0.69 | 1 | |
| 15% | Front-WD | y = 0.1195x2 − 13.385x + 1517.7 | −12.1 | −8.39 | −4.69 | 1 |
| Rear-WD | y = 0.106x2 − 13.11x + 1496.8 | −13.9 | −8.67 | −3.44 | 1 | |
| 4WD | y = 0.326x2 − 27.07x + 1674.9 | −4.23 | −3.01 | −1.79 | 1 | |
| 20% | Front-WD | y = 0.2255x2 − 21.115x + 1678.1 | −10.9 | −8.49 | −6.05 | 1 |
| Rear-WD | y = 0.1915x2 − 19.215x + 1617.1 | −12.5 | −8.99 | −5.5 | 1 | |
| 4WD | y = 0.318x2 − 27.06x + 1692.6 | −3 | −2.66 | −2.32 | 1 |
| Inflation Pressure | Moisture | Fitted Equation | Slope at Point 1 | Slope at Point 2 | Slope at Point 3 | R2 |
|---|---|---|---|---|---|---|
| 170 KPa | 10% | y = 0.026x2 − 6.9x + 1392.9 | −5.85 | −5.34 | −4.82 | 1 |
| 15% | y = 0.0245x2 − 7.325x + 1387.5 | −6.34 | −5.85 | −5.36 | 1 | |
| 20% | y = 0.1795x2 − 16.795x + 1492.5 | −9.62 | −6.02 | −2.43 | 1 | |
| 200 KPa | 10% | y = 0.1195x2 − 13.385x + 1517.7 | −8.6 | −6.2 | −3.82 | 1 |
| 15% | y = 0.106x2 − 13.11x + 1496.8 | −8.87 | −6.75 | −4.63 | 1 | |
| 20% | y = 0.326x2 − 27.07x + 1674.9 | −14.0 | −7.51 | −0.99 | 1 | |
| 230 KPa | 10% | y = 0.2255x2 − 21.115x + 1678.1 | −12.1 | −7.58 | −3.07 | 1 |
| 15% | y = 0.1915x2 − 19.215x + 1617.1 | −11.5 | −7.72 | −3.89 | 1 | |
| 20% | y = 0.318x2 − 27.06x + 1692.6 | −14.3 | −7.98 | −1.62 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moinfar, A.; Shahgholi, G.; Abbaspour-Gilandeh, Y.; Herrera-Miranda, I.; Hernández-Hernández, J.L.; Herrera-Miranda, M.A. Investigating the Effect of the Tractor Drive System Type on Soil Behavior under Tractor Tires. Agronomy 2021, 11, 696. https://doi.org/10.3390/agronomy11040696
Moinfar A, Shahgholi G, Abbaspour-Gilandeh Y, Herrera-Miranda I, Hernández-Hernández JL, Herrera-Miranda MA. Investigating the Effect of the Tractor Drive System Type on Soil Behavior under Tractor Tires. Agronomy. 2021; 11(4):696. https://doi.org/10.3390/agronomy11040696
Chicago/Turabian StyleMoinfar, Abdolmajid, Gholamhossein Shahgholi, Yousef Abbaspour-Gilandeh, Israel Herrera-Miranda, José Luis Hernández-Hernández, and Miguel Apolonio Herrera-Miranda. 2021. "Investigating the Effect of the Tractor Drive System Type on Soil Behavior under Tractor Tires" Agronomy 11, no. 4: 696. https://doi.org/10.3390/agronomy11040696
APA StyleMoinfar, A., Shahgholi, G., Abbaspour-Gilandeh, Y., Herrera-Miranda, I., Hernández-Hernández, J. L., & Herrera-Miranda, M. A. (2021). Investigating the Effect of the Tractor Drive System Type on Soil Behavior under Tractor Tires. Agronomy, 11(4), 696. https://doi.org/10.3390/agronomy11040696