
Synchronous Retrieval of LAI and Cab from UAV Remote Sensing: Development of Optimal Estimation Inversion Framework
Abstract
:1. Introduction
2. Modeling of UAV Observations
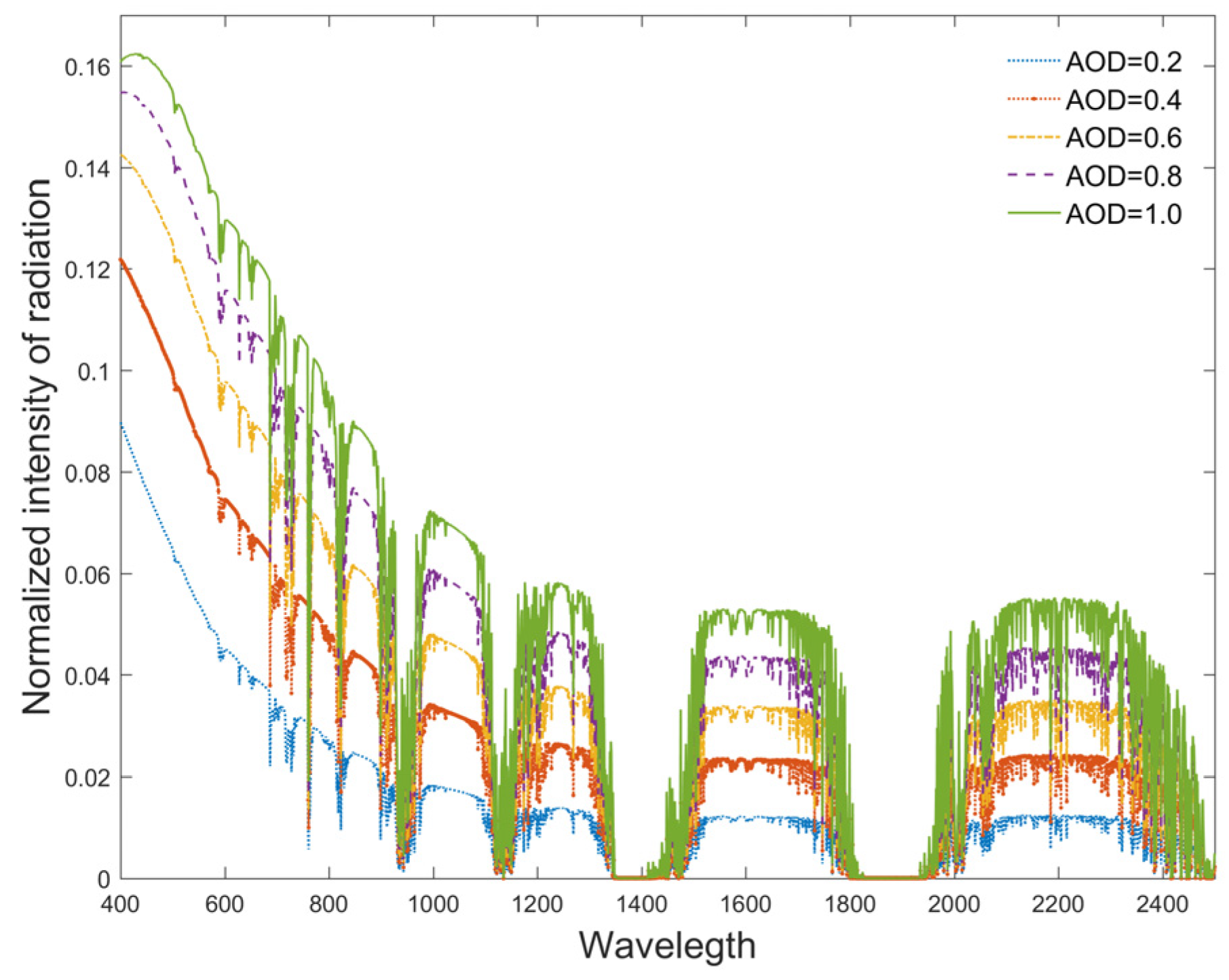
2.1. Atmospheric Radiative Transfer
2.2. Crop Canopy Reflectance
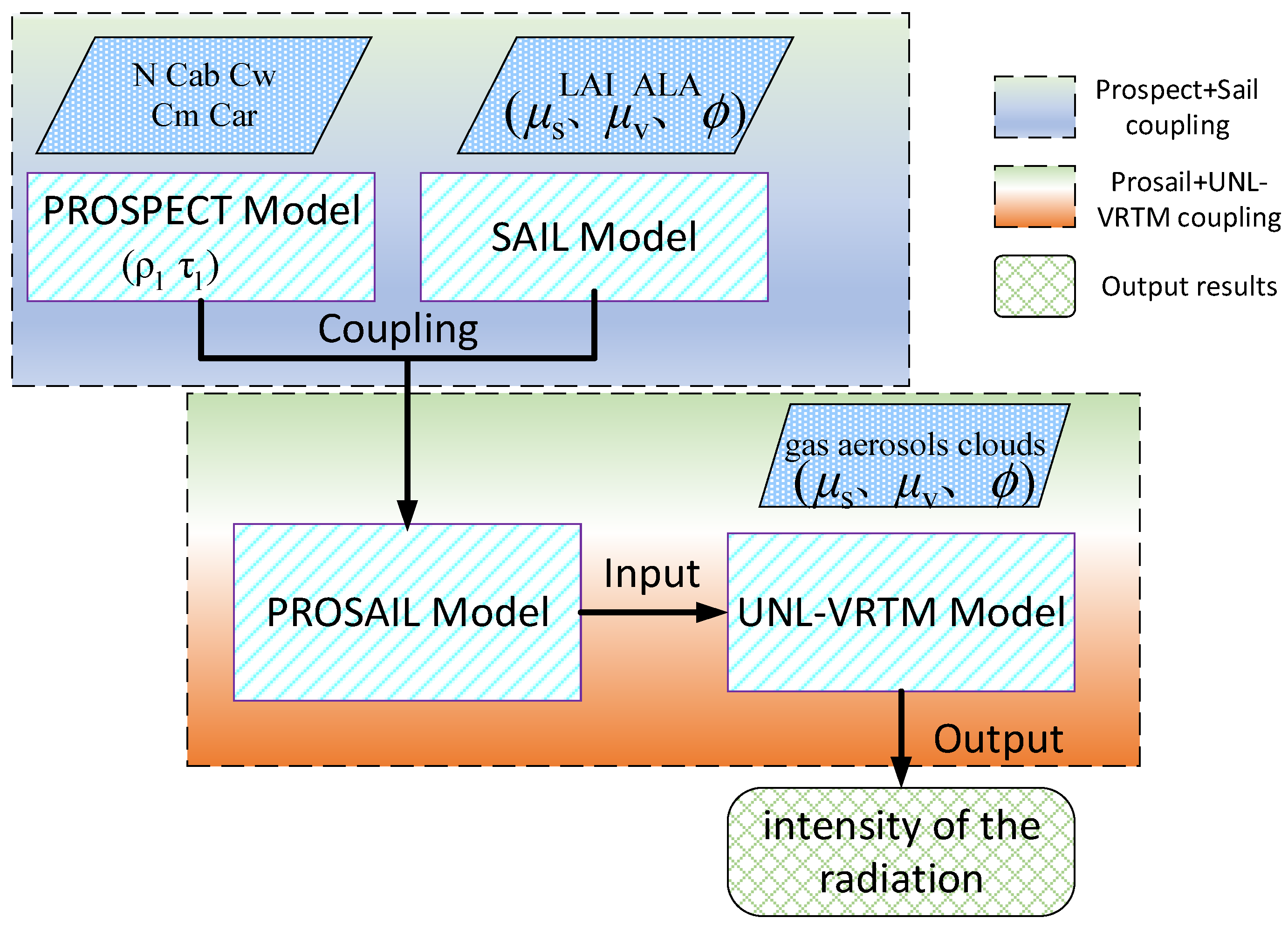
2.3. The Coupling Model for Crop Parameter Inversion
2.3.1. Coupling of Models
2.3.2. Calculation of Jacobians
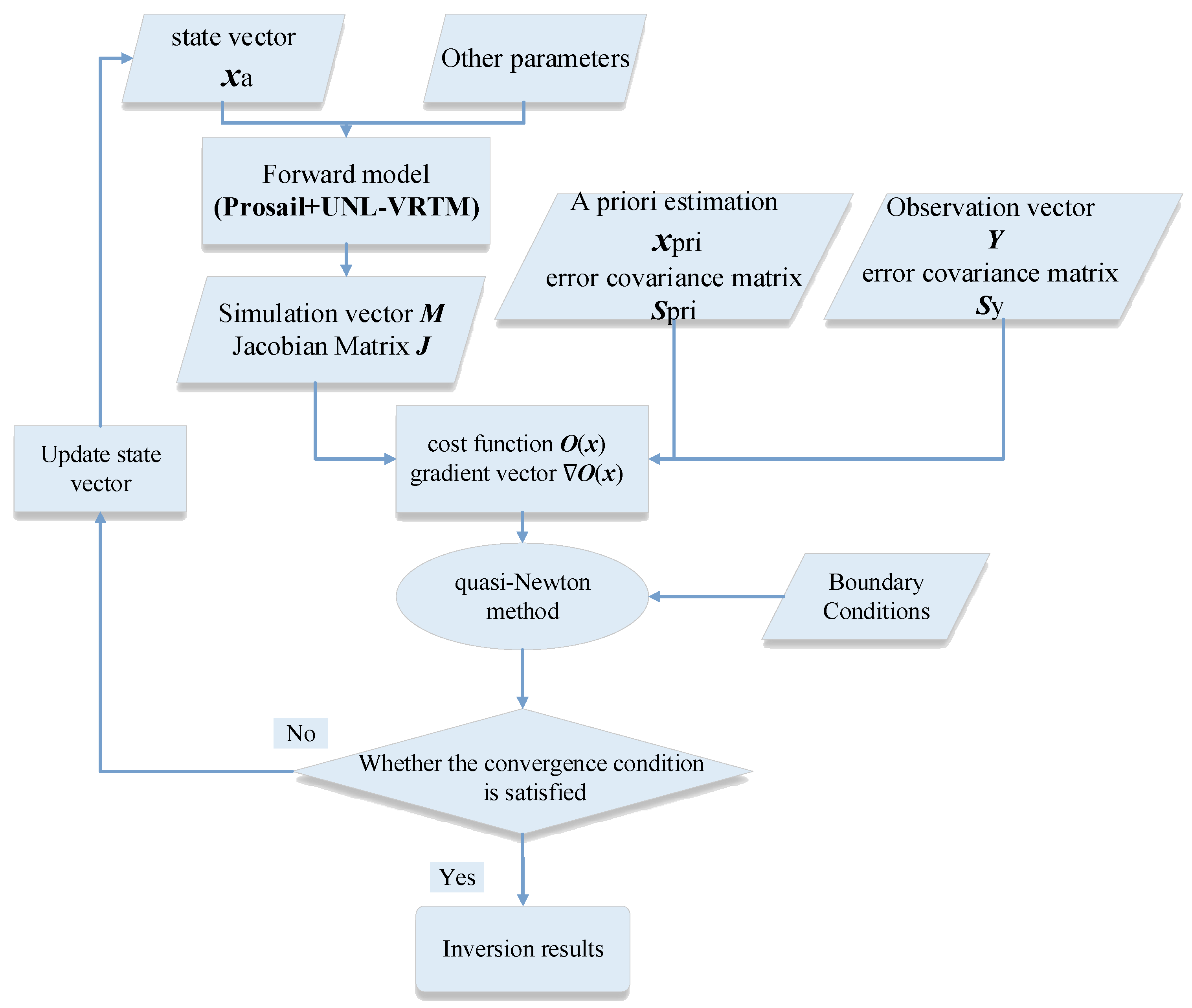
3. Method for the Synchronous Retrieval of LAI and Cab
4. Model Analysis for UAV Multispectral Measurements
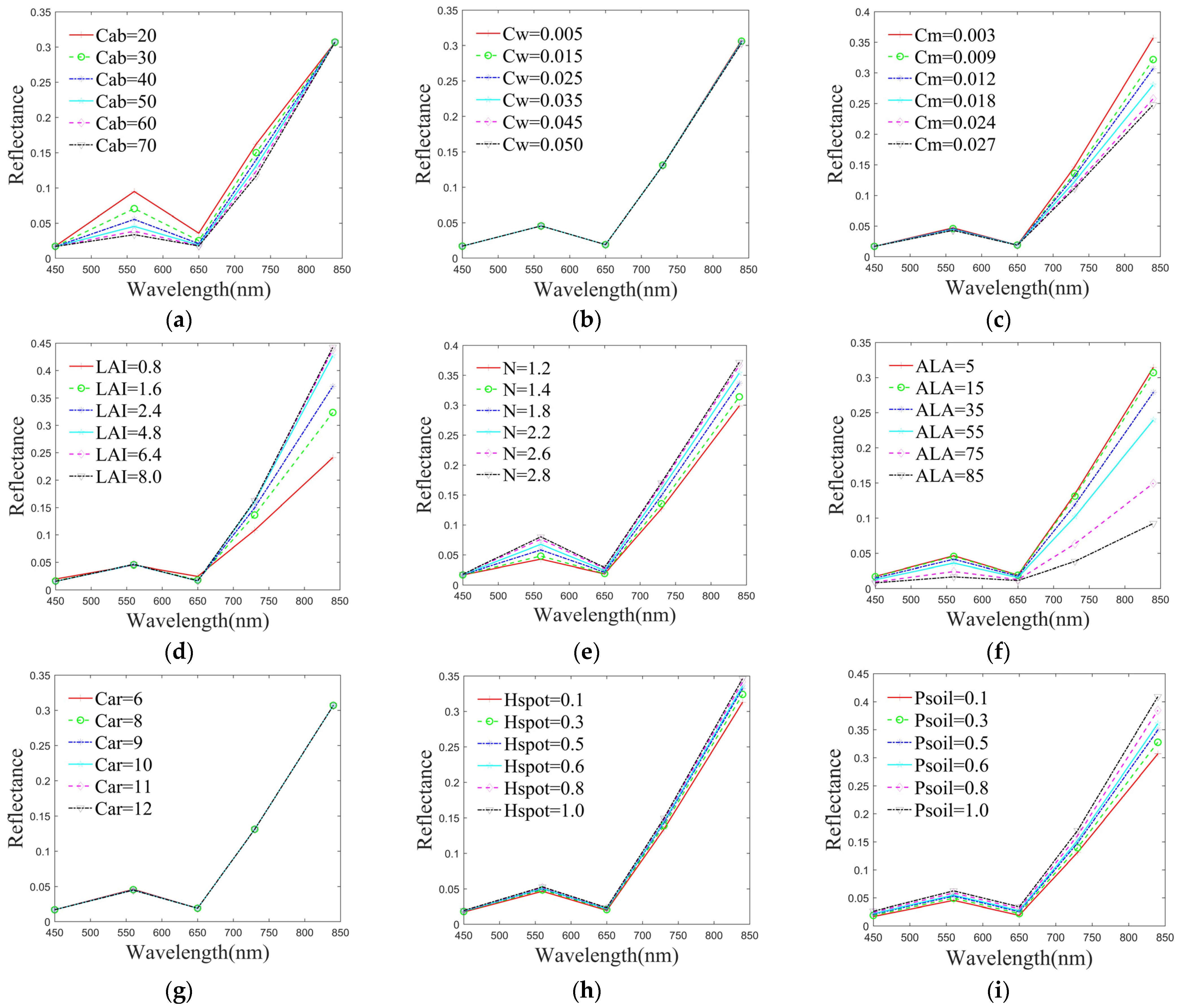
4.1. The Sensitivity of the Model to Crop Parameters
4.2. Parameters Information Content Analysis
4.3. Setting of State Vectors and Boundary Conditions
5. Results
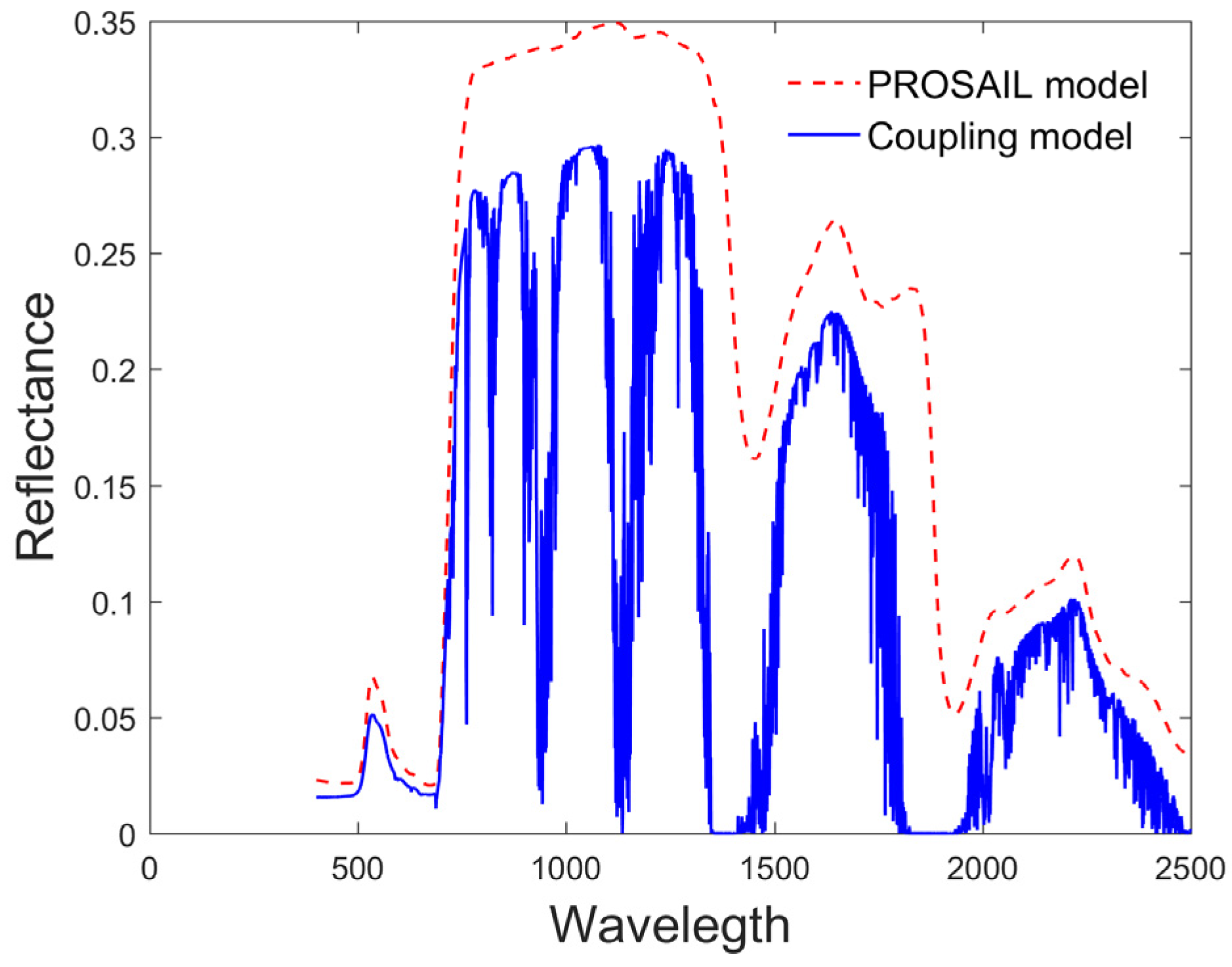
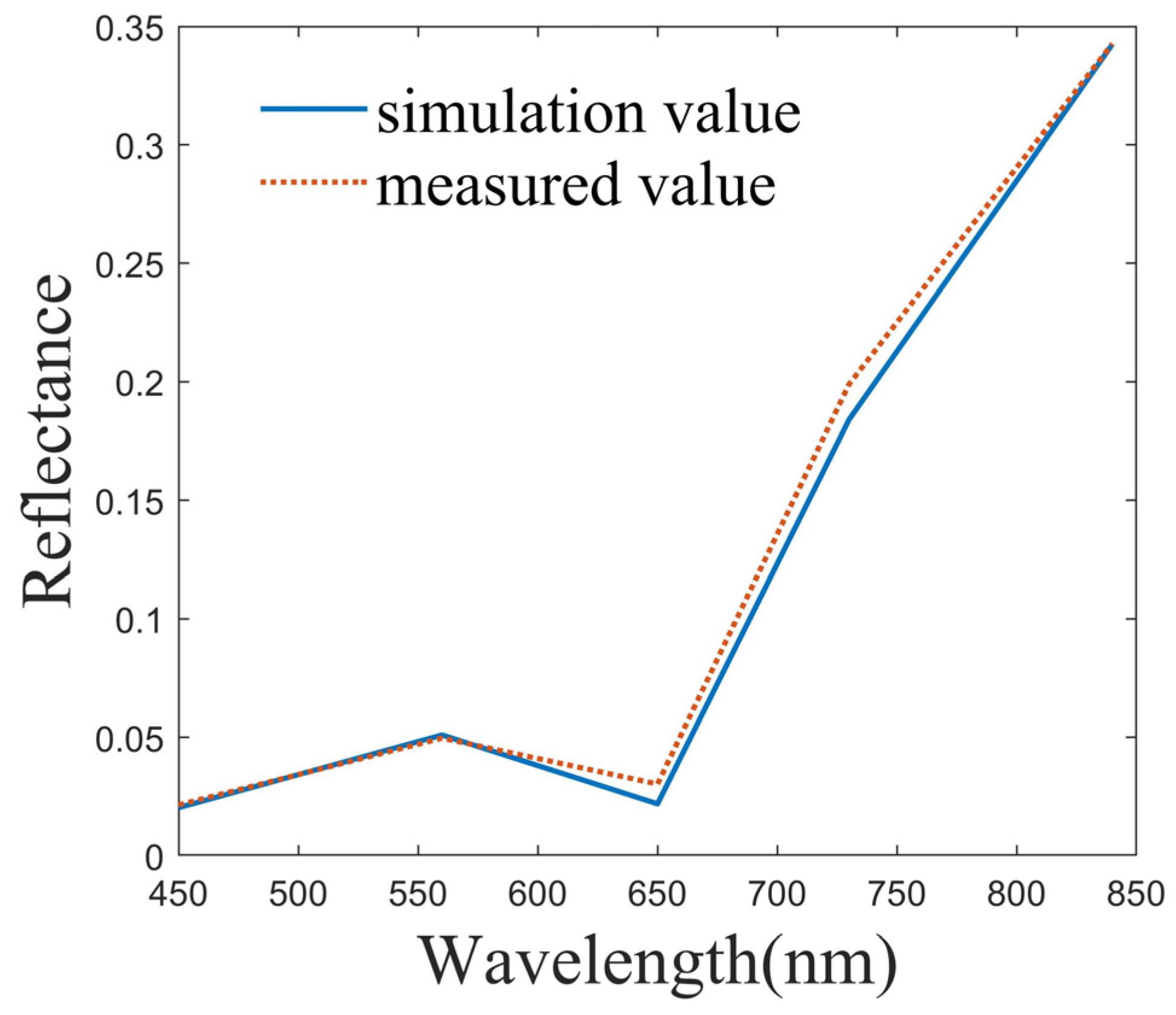
5.1. Validation of the Forward Model
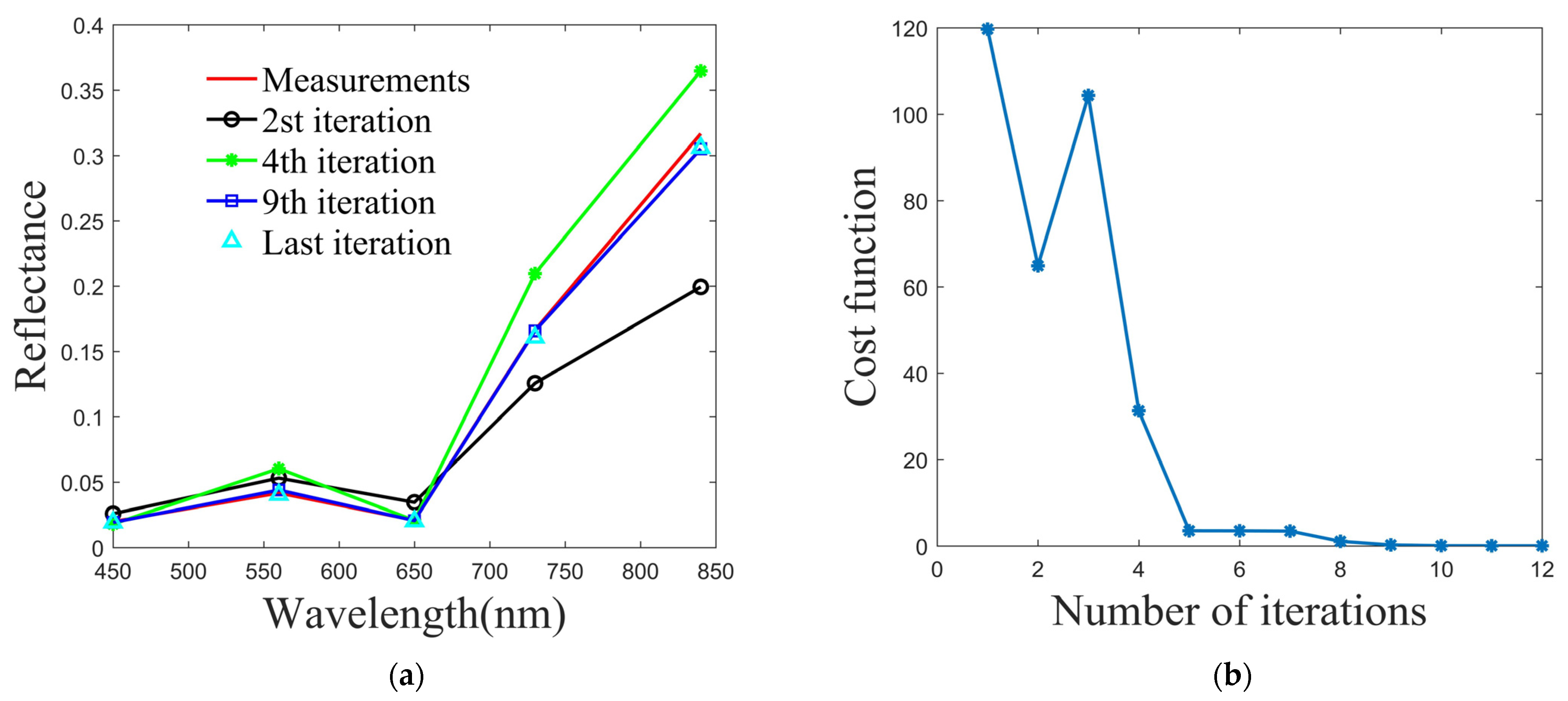
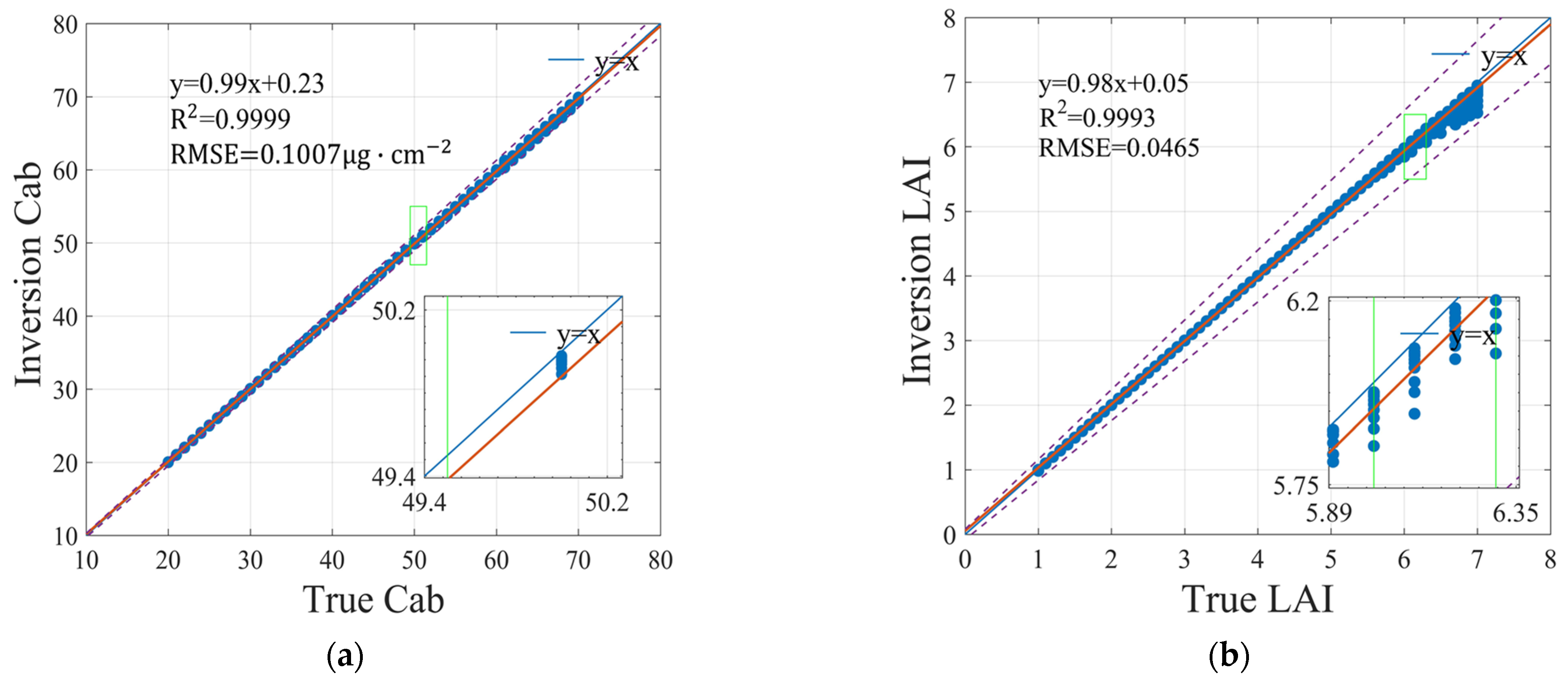
5.2. Retrieval Demonstration and Self-Consistency Tests
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, G.J.; Liu, J.G.; Zhao, C.J.; Li, Z.H.; Huang, Y.B.; Yu, H.Y.; Xu, B.; Yang, X.D.; Zhu, D.M.; Zhang, X.Y.; et al. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: Current status and perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.D.; Wang, L.Q.; Tian, T.; Yin, J.H. A review of unmanned aerial vehicle low-altitude remote sensing (uav-lars) use in agricultural monitoring in China. Remote Sens. 2021, 13, 1221. [Google Scholar] [CrossRef]
- Tattaris, M.; Reynolds, M.P.; Chapman, S.C. A direct comparison of remote sensing approaches for high-throughput phenotyping in plant breeding. Front. Plant Sci. 2016, 7, 1131. [Google Scholar] [CrossRef]
- Haghighattalab, A.; Perez, L.G.; Mondal, S.; Singh, D.; Schinstock, D.; Rutkoski, J.; Ortiz-Monasterio, I.; Singh, R.P.; Goodin, D.; Poland, J. Application of unmanned aerial systems for high throughput phenotyping of large wheat breeding nurseries. Plant Methods 2016, 12, 35. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gracia-Romero, A.; Kefauver, S.C.; Fernandez-Gallego, J.A.; Vergara-Diaz, O.; Nieto-Taladriz, M.T.; Araus, J.L. UAV and ground image-based phenotyping: A proof of concept with durum wheat. Remote Sens. 2019, 11, 1244. [Google Scholar] [CrossRef] [Green Version]
- Tao, H.L.; Feng, H.K.; Xu, L.J.; Miao, M.K.; Long, H.L.; Yue, J.B.; Li, Z.H.; Yang, G.J.; Yang, X.D.; Fan, L.L. Estimation of crop growth parameters using UAV-based hyperspectral remote sensing data. Sensors 2020, 20, 1296. [Google Scholar] [CrossRef] [Green Version]
- Feng, A.J.; Zhou, J.F.; Vories, E.D.; Sudduth, K.A.; Zhang, M.N. Yield estimation in cotton using UAV-based multi-sensor imagery. Biosyst. Eng. 2020, 193, 101–114. [Google Scholar] [CrossRef]
- Ma, C.Y.; Liu, M.X.; Ding, F.; Li, C.C.; Cui, Y.Q.; Chen, W.N.; Wang, Y.L. Wheat growth monitoring and yield estimation based on remote sensing data assimilation into the SAFY crop growth model. Sci. Rep. 2022, 12, 5473. [Google Scholar] [CrossRef]
- Velusamy, P.; Rajendran, S.; Mahendran, R.K.; Naseer, S.; Shafiq, M.; Choi, J.G. Unmanned aerial vehicles (UAV) in precision agriculture: Applications and challenges. Energies 2022, 15, 217. [Google Scholar] [CrossRef]
- Liu, K.; Zhou, Q.B.; Wu, W.B.; Tian, X.; Tang, H.J. Estimating the crop leaf area index using hyperspectral remote sensing. J. Integr. Agric. 2016, 15, 475–491. [Google Scholar] [CrossRef] [Green Version]
- Darvishzadeh, R.; Atzberger, C.; Skidmore, A.; Schlerf, M. Mapping grassland leaf area index with airborne hyperspectral imagery: A comparison study of statistical approaches and inversion of radiative transfer models. ISPRS J. Photogramm. Remote Sens. 2011, 66, 894–906. [Google Scholar] [CrossRef]
- Liang, L.; Huang, T.; Di, L.P.; Geng, D.; Di, G.; Yan, J.; Wang, S.G.; Wang, L.J.; Li, L.; Chen, B.Q.; et al. Influence of different bandwidths on LAI estimation using vegetation indices. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1494–1502. [Google Scholar] [CrossRef]
- Viña, A.; Gitelson, A.A.; Nguy-Robertson, A.L.; Peng, Y. Comparison of different vegetation indices for the remote assessment of green leaf area index of crops. Remote Sens. Environ. 2011, 115, 3468–3478. [Google Scholar] [CrossRef]
- Yu, K.; Lenz-Wiedemann, V.; Chen, X.P.; Bareth, G. Estimating leaf chlorophyll of barley at different growth stages using spectral indices to reduce soil background and canopy structure effects. ISPRS J. Photogramm. Remote Sens. 2014, 97, 58–77. [Google Scholar] [CrossRef]
- Lin, H.; Liang, L.; Zhang, L.P.; Du, P.J. Wheat leaf area index inversion with hyperspectral remote sensing based on support vector regression algorithm. Trans. Chin. Soc. Agric. Eng. 2013, 29, 139–146. [Google Scholar]
- Liang, L.; Di, L.P.; Zhang, L.P.; Deng, M.X.; Qin, Z.H.; Zhao, S.H.; Lin, H. Estimation of crop LAI using hyperspectral vegetation indices and a hybrid inversion method. Remote Sens. Environ. 2015, 165, 123–134. [Google Scholar] [CrossRef]
- Verrelst, J.; Muñoz, J.; Alonso, L.; Delegido, J.; Rivera, J.P.; Camps-Valls, G.; Moreno, J. Machine learning regression algorithms for biophysical parameter retrieval: Opportunities for sentinel-2 and -3. Remote Sens. Environ. 2012, 118, 127–139. [Google Scholar] [CrossRef]
- Lu, X.P.; Wang, X.X.; Zhang, X.J.; Wang, J.; Yang, Z.N. Winter wheat leaf area index inversion by the genetic algorithms neural network model based on SAR data. Int. J. Digit. Earth 2022, 15, 362–380. [Google Scholar] [CrossRef]
- Saddik, A.; Latif, R.; Elhoseny, M.; El Ouardi, A. Real-time evaluation of different indexes in precision agriculture using a heterogeneous embedded system. Sustain. Comput. Inform. Syst. 2021, 30, 100506. [Google Scholar] [CrossRef]
- Saddik, A.; Latif, R.; El Ouardi, A.; Alghamdi, M.I.; Elhoseny, M. Improving Sustainable Vegetation Indices Processing on Low-Cost Architectures. Sustainability 2022, 14, 2521. [Google Scholar] [CrossRef]
- Duan, S.B.; Li, Z.L.; Wu, H.; Tang, B.H.; Ma, L.L.; Zhao, E.Y.; Li, C.R. Inversion of the PROSAIL model to estimate leaf area index of maize, potato, and sunflower fields from unmanned aerial vehicle hyperspectral data. Int. J. Appl. Earth Obs. Geoinf. 2014, 26, 12–20. [Google Scholar] [CrossRef]
- Upreti, D.; Huang, W.J.; Kong, W.P.; Pascucci, S.; Pignatti, S.; Zhou, X.F.; Ye, H.C.; Casa, R. A comparison of hybrid machine learning algorithms for the retrieval of wheat biophysical variables from sentinel-2. Remote Sens. 2019, 11, 481. [Google Scholar] [CrossRef] [Green Version]
- Rivera, J.P.; Verrelst, J.; Leonenko, G.; Moreno, J. Multiple cost functions and regularization options for improved retrieval of leaf chlorophyll content and LAI through Inversion of the PROSAIL Model. Remote Sens. 2013, 5, 3280–3304. [Google Scholar] [CrossRef] [Green Version]
- He, W.; Yang, H.; Pan, J.J.; Xu, P.P. Exploring Optimal Design of Look-Up Table for PROSAIL Model Inversion with Multi-Angle MODIS Data. In Proceedings of the Land Surface Remote Sensing, Kyoto, Japan, 21 November 2012; SPIE: Bellingham, WA, USA, 2012; Volume 8524, pp. 327–339. [Google Scholar]
- Richter, K.; Hank, T.B.; Vuolo, F.; Mauser, W.; D’Urso, G. Optimal exploitation of the sentinel-2 spectral capabilities for crop leaf area index mapping. Remote Sens. 2012, 4, 561–582. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Wang, L.; Shi, S.; Li, Z.H.; Yang, J.; Gong, W.; Wang, S.Q.; Tagesson, T. Leaf pigment retrieval using the PROSAIL model: Influence of uncertainty in prior canopy-structure information. Crop J. 2022, 10, 1251–1263. [Google Scholar] [CrossRef]
- Miraglio, T.; Adeline, K.; Huesca, M.; Ustin, S.; Briottet, X. Joint use of PROSAIL and DART for fast LUT building: Application to gap fraction and leaf biochemistry estimations over sparse oak stands. Remote Sens. 2020, 12, 2925. [Google Scholar] [CrossRef]
- Darvishzadeh, R.; Matkan, A.A.; Ahangar, A.D. Inversion of a radiative transfer model for estimation of rice canopy chlorophyll content using a lookup-table approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1222–1230. [Google Scholar] [CrossRef]
- Sun, B.; Wang, C.F.; Yang, C.H.; Xu, B.D.; Zhou, G.S.; Li, X.Y.; Xie, J.; Xu, S.J.; Liu, B.; Zhang, J.; et al. Retrieval of rapeseed leaf area index using the PROSAIL model with canopy coverage derived from UAV images as a correction parameter. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102373. [Google Scholar] [CrossRef]
- Berger, K.; Atzberger, C.; Danner, M.; D’Urso, G.; Mauser, W.; Vuolo, F.; Hank, T. Evaluation of the PROSAIL model capabilities for future hyperspectral model environments: A review study. Remote Sens. 2018, 10, 85. [Google Scholar] [CrossRef] [Green Version]
- Bassani, C.; Sterckx, S. Calibration of satellite low radiance by AERONET-OC products and 6SV model. Remote Sens. 2021, 13, 781. [Google Scholar] [CrossRef]
- Rosas, J.; Houborg, R.; McCabe, M.F. Sensitivity of Landsat 8 surface temperature estimates to atmospheric profile data: A study using MODTRAN in dryland irrigated systems. Remote Sens. 2017, 9, 988. [Google Scholar] [CrossRef] [Green Version]
- Shang, H.; Chen, L.; Breon, F.M.; Letu, H.; Li, S.; Wang, Z.; Su, L. Impact of cloud horizontal inhomogeneity and directional sampling on the retrieval of cloud droplet size by the POLDER instrument. Atmos. Meas. Tech. 2015, 8, 4931–4945. [Google Scholar] [CrossRef] [Green Version]
- Zheng, F.X. Aerosol Multi-Parameter Optimal Retrieval from Multi-Angle Polarization Satellite Data; University of Chinese Academy of Sciences: Beijing, China, 2019. [Google Scholar]
- Gómez-Dans, J.L.; Lewis, P.E.; Disney, M. Efficient emulation of radiative transfer codes using gaussian processes and application to land surface parameter inferences. Remote Sens. 2016, 8, 119. [Google Scholar] [CrossRef] [Green Version]
- Mishchenko, M.I.; Travis, L.D.; Lacis, A.A. Scattering, Absorption, and Emission of Light by Small Particles; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Kaufman, Y.J.; Tanré, D.; Gordon, H.R.; Nakajima, T.; Lenoble, J.; Frouin, R.; Grassl, H.; Herman, B.M.; King, M.D.; Teillet, P.M. Passive remote sensing of tropospheric aerosol and atmospheric correction for the aerosol effect. J. Geophys. Res. Atmos. 1997, 102, 16815–16830. [Google Scholar] [CrossRef] [Green Version]
- Hou, W.; Li, Z.; Wang, J.; Xu, X.; Goloub, P.; Qie, L. Improving remote sensing of aerosol microphysical properties by near-infrared polarimetric measurements over vegetated land: Information content analysis. J. Geophys. Res. Atmos. 2018, 123, 2215–2243. [Google Scholar] [CrossRef]
- Wang, J.; Xu, X.G.; Ding, S.G.; Zeng, J.; Spurr, R.; Liu, X.; Chance, K.; Mishchenko, M. A numerical testbed for remote sensing of aerosols, and its demonstration for evaluating retrieval synergy from a geostationary satellite constellation of GEO-CAPE and GOES-R. J. Quant. Spectrosc. Radiat. Transf. 2014, 146, 510–528. [Google Scholar] [CrossRef] [Green Version]
- Adeluyi, O.; Harris, A.; Verrelst, J.; Foster, T.; Clay, G.D. Estimating the phenological dynamics of irrigated rice leaf area index using the combination of PROSAIL and gaussian process regression. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102454. [Google Scholar] [CrossRef]
- Jacquemoud, S.; Verhoef, W.; Baret, F.; Bacour, C.; Zarco-Tejada, P.J.; Asner, G.P.; François, C.; Ustin, S.L. PROSPECT+SAIL models: A review of use for vegetation characterization. Remote Sens. Environ. 2009, 113, S56–S66. [Google Scholar] [CrossRef]
- Tripathi, R.; Sahoo, R.N.; Sehgal, V.K.; Tomar, R.K.; Chakraborty, D.; Nagarajan, S. Inversion of PROSAIL model for retrieval of plant biophysical parameters. J. Indian Soc. Remote Sens. 2012, 40, 19–28. [Google Scholar] [CrossRef]
- Hou, W.; Wang, J.; Xu, X.; Reid, J.S.; Han, D. An algorithm for hyperspectral remote sensing of aerosols: 1. Development of theoretical framework. J. Quant. Spectrosc. Radiat. Transf. 2016, 178 (Suppl. C), 400–415. [Google Scholar] [CrossRef]
- Zheng, F.X.; Li, Z.Q.; Hou, W.Z.; Qie, L.L.; Zhang, C. Aerosol retrieval study from multiangle polarimetric satellite data based on optimal estimation method. J. Appl. Remote Sens. 2020, 14, 014516. [Google Scholar] [CrossRef]
- Zheng, F.X.; Hou, W.Z.; Li, Z.Q. Improvement of Aerosol Fine Mode Fraction Retrieval from Skylight Measurements by Degree of Linear Polarization: Information Content Analysis. In Proceedings of the AOPC 2020: Optical Spectroscopy and Imaging; and Biomedical Optics, Beijing, China, 5 November 2020; SPIE: Bellingham, WA, USA, 2020; Volume 11566, p. 1156602. [Google Scholar]
- Spurr, R.; Wang, J.; Zeng, J.; Mishchenko, M.I. Linearized T-matrix and Mie scattering computations. J. Quant. Spectrosc. Radiat. Transf. 2012, 113, 425–439. [Google Scholar] [CrossRef] [Green Version]
- Combal, B.; Baret, F.; Weiss, M.; Trubuil, A.; Macé, D.; Pragnère, A.; Myneni, R.; Knyazikhin, Y.; Wang, L. Retrieval of canopy biophysical variables from bidirectional reflectance. Remote Sens. Environ. 2003, 84, 1–15. [Google Scholar] [CrossRef]
- Dubovik, O.; Herman, M.; Holdak, A.; Lapyonok, T.; Tanré, D.; Deuzé, J.L.; Ducos, F.; Sinyuk, A.; Lopatin, A. Statistically optimized inversion algorithm for enhanced retrieval of aerosol properties from spectral multi-angle polarimetric satellite observations. Atmos. Meas. Tech. 2011, 4, 975–1018. [Google Scholar] [CrossRef] [Green Version]
- Wu, L.; Hasekamp, O.; Van Diedenhoven, B.; Cairns, B. Aerosol retrieval from multiangle, multispectral photopolarimetric measurements: Importance of spectral range and angular resolution. Atmos. Meas. Tech. 2015, 8, 2625–2638. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.G.; Wang, J. Retrieval of aerosol microphysical properties from AERONET photopolarimetric measurements: 1. Information content analysis. J. Geophys. Res. Atmos. 2015, 120, 7059–7078. [Google Scholar] [CrossRef] [Green Version]
- Byrd, R.H.; Lu, P.H.; Nocedal, J.; Zhu, C.Y. A limited memory algorithm for bound constrained optimization. SIAM J. Sci. Comput. 1995, 16, 1190–1208. [Google Scholar] [CrossRef]
- Xiao, Y.H.; Zhang, H.C. Modified subspace limited memory BFGS algorithm for large-scale bound constrained optimization. J. Comput. Appl. Math. 2008, 222, 429–439. [Google Scholar] [CrossRef] [Green Version]
- Su, W.; Wu, J.Y.; Wang, X.S.; Xie, Z.X.; Zhang, Y.; Tao, W.C.; Jin, T. Retrieving corn canopy leaf area index based on sentinel-2 image and PROSAIL model parameter calibration. Spectrosc. Spectr. Anal. 2021, 41, 1891–1897. [Google Scholar]
- Jia, J.Q. Study on the Inversion Method of Leaf Area Index of Summer Maize at Different Growth Stages Based on GF-2 Satellite. Northwest University: Kirkland, WA, USA, 2018. [Google Scholar]
- Wan, L.; Zhang, J.F.; Dong, X.Y.; Du, X.Y.; Zhu, J.P.; Sun, D.W.; Liu, Y.F.; He, Y.; Cen, H.Y. Unmanned aerial vehicle-based field phenotyping of crop biomass using growth traits retrieved from PROSAIL model. Comput. Electron. Agric. 2021, 187, 106304. [Google Scholar] [CrossRef]
- Hou, W.Z.; Wang, J.; Xu, X.G.; Reid, J.S. An algorithm for hyperspectral remote sensing of aerosols: 2. Information content analysis for aerosol parameters and principal components of surface spectra. J. Quant. Spectrosc. Radiat. Transf. 2017, 192 (Suppl. C), 14–29. [Google Scholar] [CrossRef]
- Wang, G.A.; Mi, H.T.; Deng, T.H.; Li, Y.N.; Li, L.X. Calculation of the change range of the sun high angle and the azimuth of sunrise and sunset in one year. Meteorol. Environ. Sci. 2007, 30, 161–164. [Google Scholar]
- Jeong, U.; Kim, J.; Ahn, C.; Torres, O.; Liu, X.; Bhartia, P.K.; Spurr, R.J.; Haffner, D.; Chance, K.; Holben, B.N. An optimal-estimation-based aerosol retrieval algorithm using OMI near-UV observations. Atmos. Chem. Phys. 2016, 16, 177–193. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Types | Parameter Symbols | Parameter Description | Unit |
|---|---|---|---|
| Geometry | SZA | Solar zenith angle | Degrees (°) |
| VZA | Viewing zenith angle | Degrees (°) | |
| SAA | Solar azimuthal angle | Degrees (°) | |
| VAA | Viewing azimuthal angle | Degrees (°) | |
| Atmosphere | Atmospheric type | The meteorological and air density profile | -- |
| Pressure | Surface pressure | hPa | |
| Altitude | Surface altitude | m | |
| Aerosol | AOD | Aerosol optical depth | -- |
| Ri | Complex refractive index of aerosol | -- | |
| Profile | The vertical profile of aerosol | -- | |
| PSD | Aerosol particle size distribution | -- | |
| Surface | Lambertian | Lambertian surface reflectance | -- |
| BRDF | Surface bidirectional reflectance | -- | |
| Spectra | Wavelength | Central wavelength of spectral channel | nm |
| FWHM | Full width at half maximum of spectral channel | nm |
| Model | Parameter Symbols | Parameter Description | Common Value | Search Range | Unit |
|---|---|---|---|---|---|
| PROSPECT | N | Leaf structure parameter | 1.3 | 1.2~2.8 | -- |
| Cab | Chlorophyll a and b content | 50 | 20~70 | μg·cm−2 | |
| Car | Carotenoids content | 8 | 6~12 | μg·cm−2 | |
| Cw | Equivalent water thickness | 0.004 | 0.004~0.05 | cm | |
| Cm | Leaf mass per unit leaf area | 0.012 | 0.003~0.027 | g·cm−2 | |
| SAIL | LAI | Leaf area index | 1.4 | 1~7 | -- |
| ALA | Average leaf angle | 15 | 0~90 | Degrees (°) | |
| Hspot | Hot spot | 0.01 | 0.01~1.0 | -- | |
| Psoil | Soil coefficient | 0.1 | 0.1~1.0 | -- |
| Band | Center Wavelength/nm | Bandwidth |
|---|---|---|
| Band1-Blue | 450 | 16 |
| Band2-Green | 560 | 16 |
| Band3-Red | 650 | 16 |
| Band4-RedEdge | 730 | 16 |
| Band5-NIR | 840 | 26 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, F.; Wang, X.; Ji, J.; Ma, H.; Cui, H.; Shi, Y.; Zhao, S. Synchronous Retrieval of LAI and Cab from UAV Remote Sensing: Development of Optimal Estimation Inversion Framework. Agronomy 2023, 13, 1119. https://doi.org/10.3390/agronomy13041119
Zheng F, Wang X, Ji J, Ma H, Cui H, Shi Y, Zhao S. Synchronous Retrieval of LAI and Cab from UAV Remote Sensing: Development of Optimal Estimation Inversion Framework. Agronomy. 2023; 13(4):1119. https://doi.org/10.3390/agronomy13041119
Chicago/Turabian StyleZheng, Fengxun, Xiaofei Wang, Jiangtao Ji, Hao Ma, Hongwei Cui, Yi Shi, and Shaoshuai Zhao. 2023. "Synchronous Retrieval of LAI and Cab from UAV Remote Sensing: Development of Optimal Estimation Inversion Framework" Agronomy 13, no. 4: 1119. https://doi.org/10.3390/agronomy13041119
APA StyleZheng, F., Wang, X., Ji, J., Ma, H., Cui, H., Shi, Y., & Zhao, S. (2023). Synchronous Retrieval of LAI and Cab from UAV Remote Sensing: Development of Optimal Estimation Inversion Framework. Agronomy, 13(4), 1119. https://doi.org/10.3390/agronomy13041119