

Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers


Abstract
:1. Introduction
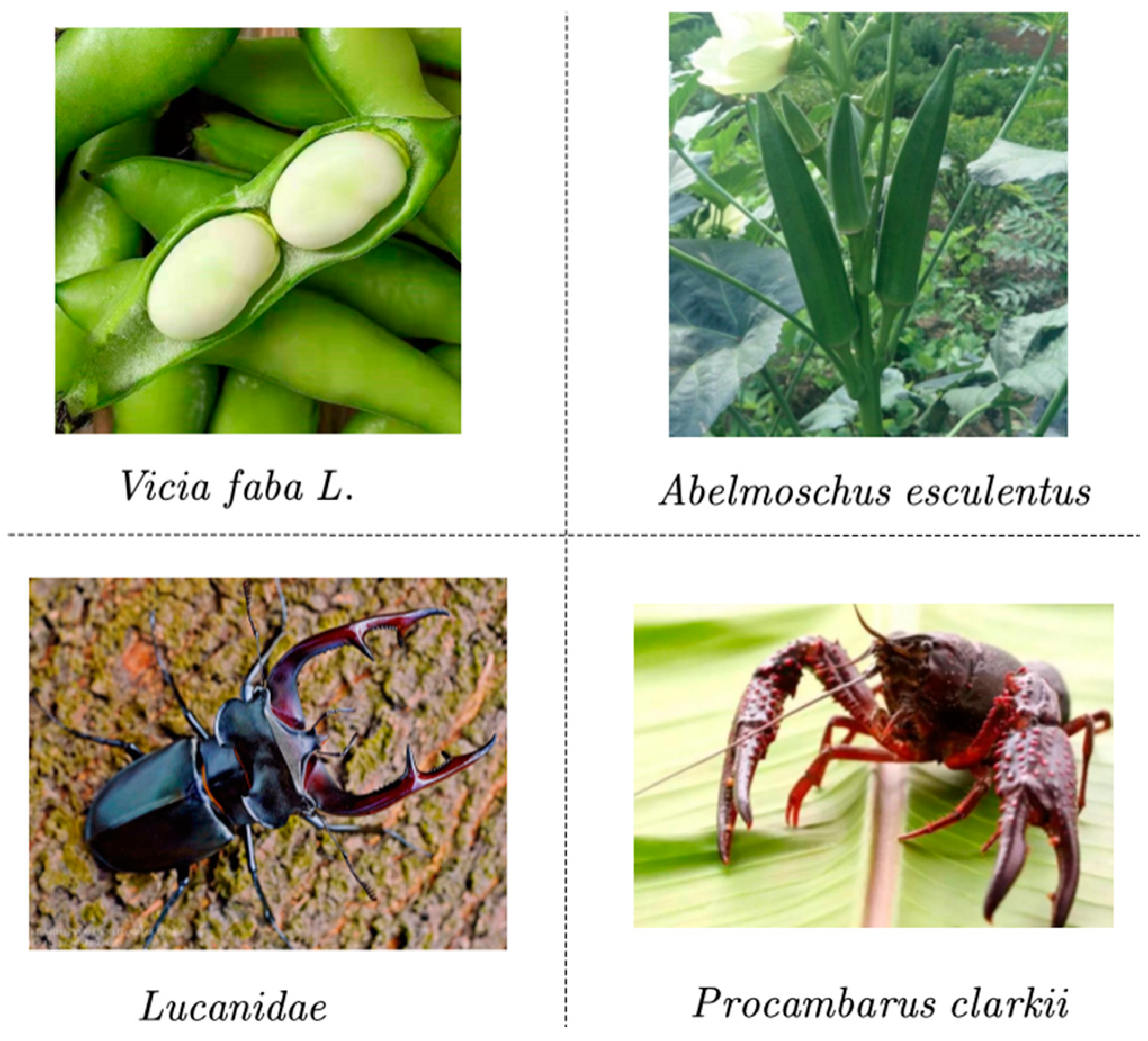
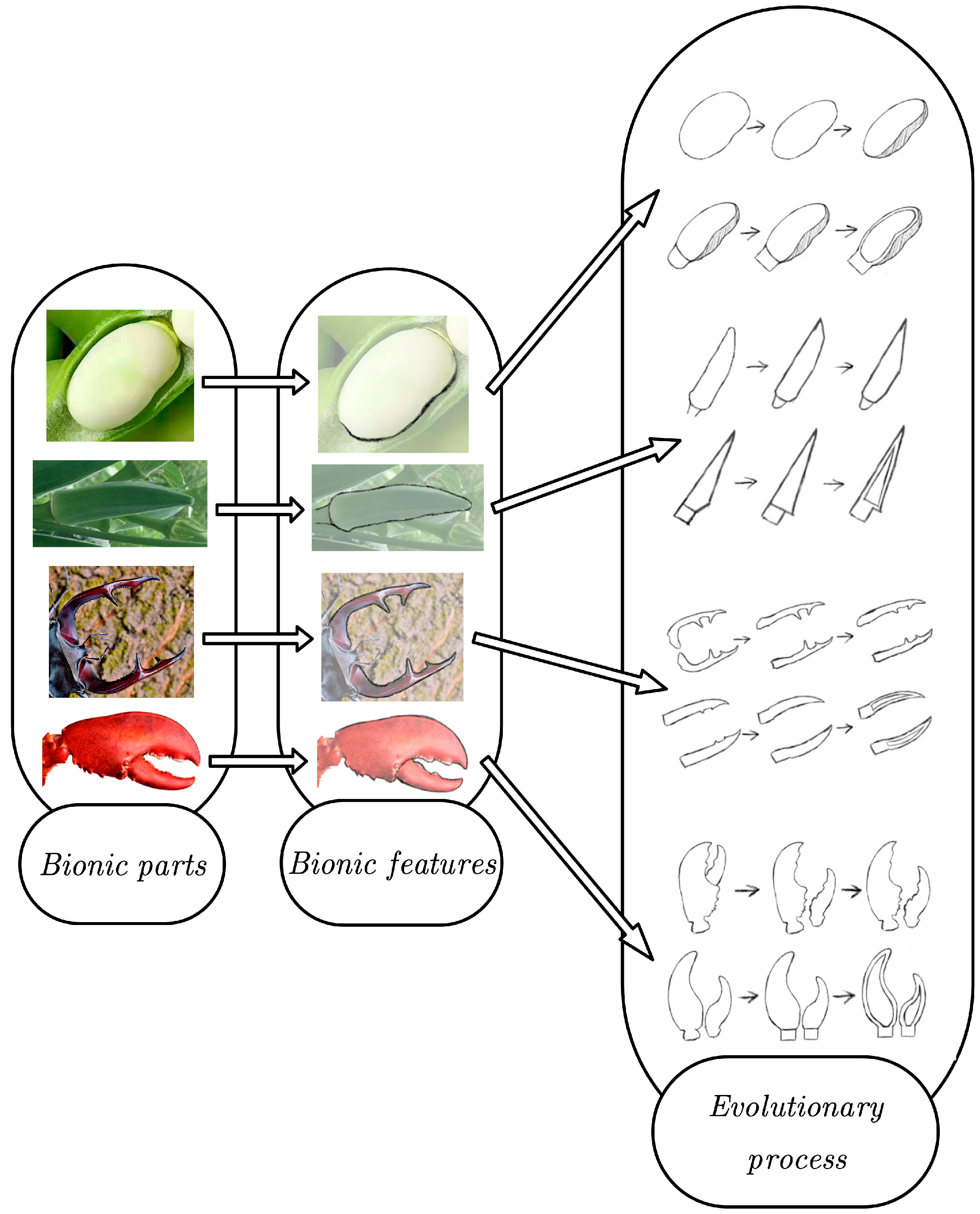
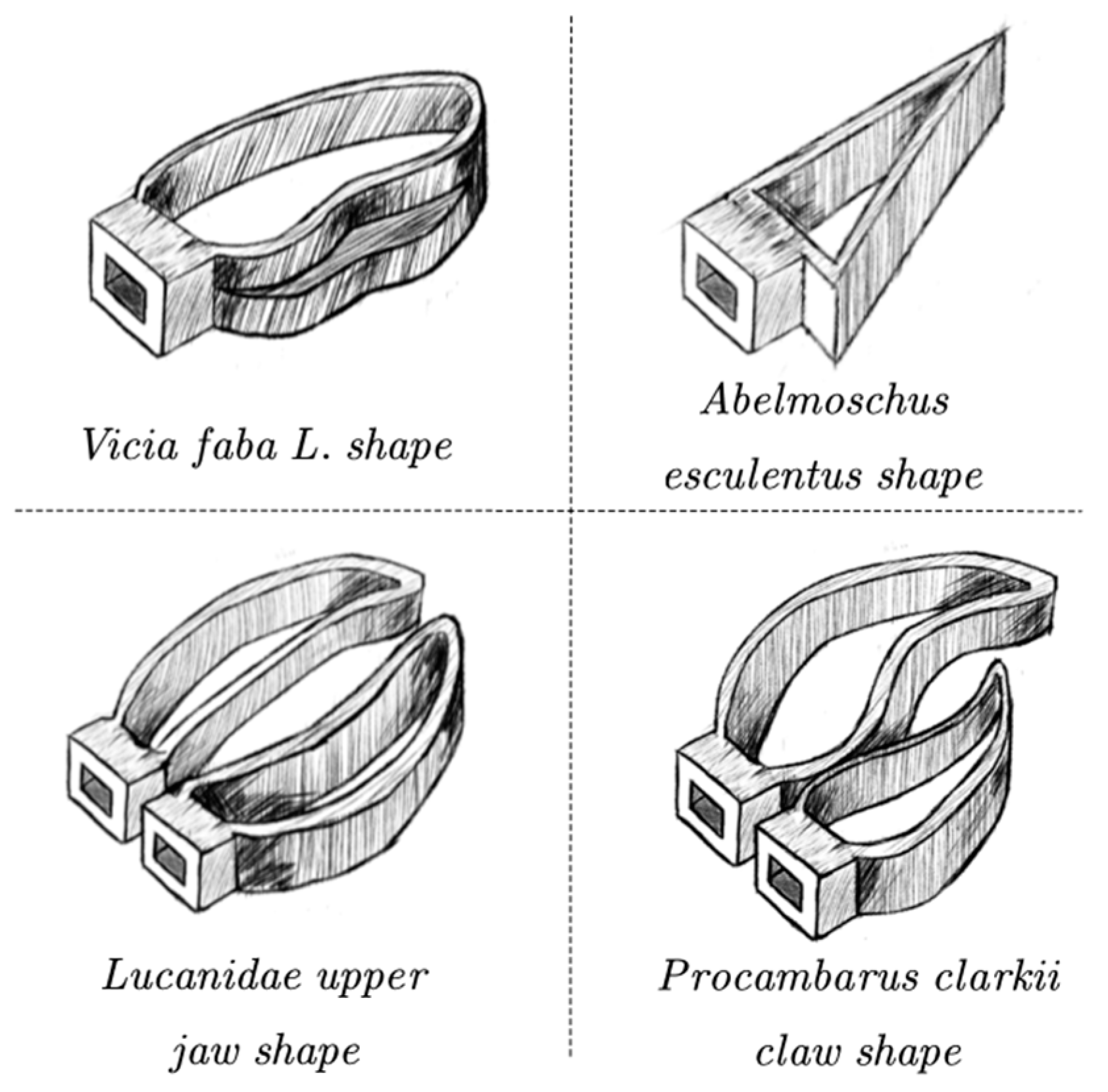
2. Bionic Design
3. Harvesting Program Determination
3.1. Tensile Testing and Parameter Measurement of Peppers
3.2. Determination of Flexible End-Effector Parameters
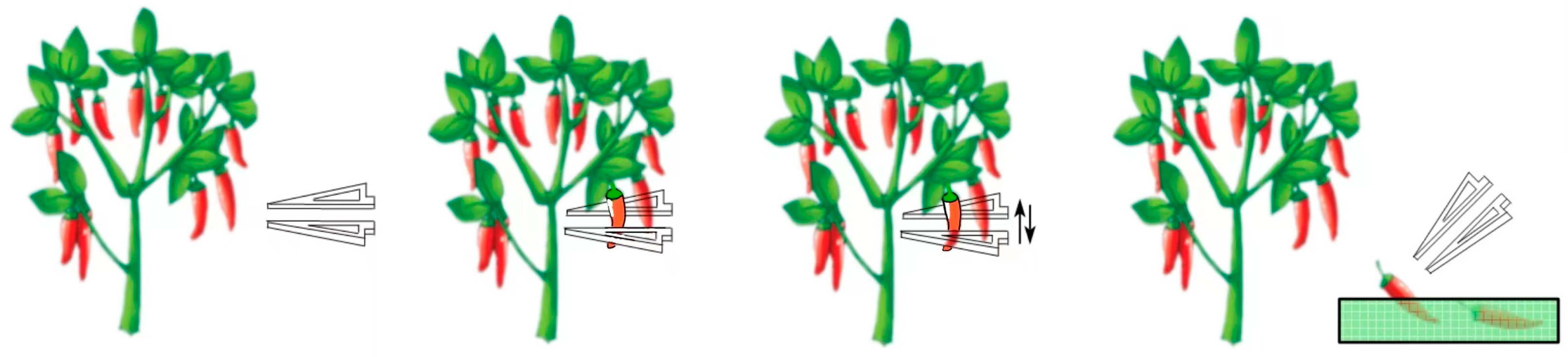
- The peppers were scattered throughout the pepper tree, so the flexible end-effector should be slender and shaped in a way that makes it easy to pick more deeply into the canopy [25];
- For maximum protection of the peppers, the clamping surface of the flexible end-effector should be larger, spreading out the average pressure during picking [26];
- To reduce manufacturing costs, the flexible end-effector structure should be as simple as possible [27];
- The design should meet the experimental prototype connection requirements:
3.3. Facility Agriculture Pepper-Picking Robot
4. Feasibility and Optimization of Design
4.1. Structural Feasibility Verification
4.2. Preliminary Determination of Optimal Design
5. Field Trials
5.1. Experimental Conditions and Setting
5.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, J.; You, F.; Wang, J.; Wang, Z. Evolution Modes of Pepper Industry Clusters under the Perspective of Social Network—An Example from Xinfu District, Xinzhou, Shanxi Province. Sustainability 2023, 15, 4948. [Google Scholar] [CrossRef]
- Abbasi, R.; Martinez, P.; Ahmad, R. The digitization of agricultural industry–a systematic literature review on agriculture 4.0. Smart Agric. Technol. 2022, 2, 100042. [Google Scholar] [CrossRef]
- Cai, P.; Zhang, S. Research Status and Development Trend of Intelligent Mechanized Pepper Harvesting. Asian J. Res. Crop Sci. 2022, 7, 33–41. [Google Scholar]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective harvesting robotics: Current research, trends, and future directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Ren, K.; Yu, J. Research status of bionic amphibious robots: A review. Ocean Eng. 2021, 227, 108862. [Google Scholar] [CrossRef]
- Li, J.; Luan, Z.; Wang, Y.; Huang, M.; Yan, J.; Wang, Y. Analysis modeling and experiment of bionic winding soft actuator inspired by plant tendrils. Smart Mater. Struct. 2023, 32, 35023. [Google Scholar] [CrossRef]
- Akter, A.Y.; Basak, H. Design and analysis of biomimetics based excavator bucket and tooth. Proc. Inst. Mech. Eng. Part E J. Process Mech. Eng. 2022, 236, 1167–1175. [Google Scholar] [CrossRef]
- Jiang, H.; Han, X.; Jing, Y.; Guo, N.; Wan, F.; Song, C. Rigid–Soft Interactive Design of a Lobster-Inspired Finger Surface for Enhanced Grasping Underwater. Front. Robot. AI 2021, 8, 787187. [Google Scholar] [CrossRef]
- Hu, F.; Lyu, L.; He, Y. A 3D printed paper-based thermally driven soft robotic gripper inspired by cabbage. Int. J. Precis. Eng. Manuf. 2019, 20, 1915–1928. [Google Scholar] [CrossRef]
- Bachche, S.; Oka, K. Design, modeling and performance testing of end-effector for sweet pepper harvesting robot hand. J. Robot. Mechatron. 2013, 25, 705–717. [Google Scholar] [CrossRef]
- Arad, B.; Balendonck, J.; Barth, R.; Ben Shahar, O.; Edan, Y.; Hellström, T.; Hemming, J.; Kurtser, P.; Ringdahl, O.; Tielen, T. Development of a sweet pepper harvesting robot. J. Field Robot. 2020, 37, 1027–1039. [Google Scholar] [CrossRef]
- Bac, C.W.; Hemming, J.; Van Tuijl, B.; Barth, R.; Wais, E.; van Henten, E.J. Performance evaluation of a harvesting robot for sweet pepper. J. Field Robot. 2017, 34, 1123–1139. [Google Scholar] [CrossRef]
- Montoya-Cavero, L.; de León Torres, R.D.; Gómez-Espinosa, A.; Cabello, J.A.E. Vision systems for harvesting robots: Produce detection and localization. Comput. Electron. Agr. 2022, 192, 106562. [Google Scholar] [CrossRef]
- Jin, L.; Xinyan, Q.; Chen, Y. Design and analysis on key components of a novel pepper harvester’s picking device. Open Mech. Eng. J. 2015, 9, 540–545. [Google Scholar] [CrossRef]
- Wang, Y.; Deng, X.; Luo, J.; Li, B.; Xiao, S. Cross-task feature enhancement strategy in multi-task learning for harvesting Sichuan pepper. Comput. Electron. Agric. 2023, 207, 107726. [Google Scholar] [CrossRef]
- Hespeler, S.C.; Nemati, H.; Dehghan-Niri, E. Non-destructive thermal imaging for object detection via advanced deep learning for robotic inspection and harvesting of peppers. Artif. Intell. Agric. 2021, 5, 102–117. [Google Scholar] [CrossRef]
- Ning, Z.; Luo, L.; Ding, X.; Dong, Z.; Yang, B.; Cai, J.; Chen, W.; Lu, Q. Recognition of sweet peppers and planning the robotic picking sequence in high-density orchards. Comput. Electron. Agric. 2022, 196, 106878. [Google Scholar] [CrossRef]
- Liu, T.; Ma, Y.; Yang, W.; Ji, W.; Wang, R.; Jiang, P. Spatial-temporal interaction learning based two-stream network for action recognition. Inf. Sci. 2022, 606, 864–876. [Google Scholar] [CrossRef]
- Deng, L.; Liu, T.; Jiang, P.; Xie, F.; Zhou, J.; Yang, W.; Qi, A. Design of an Adaptive Algorithm for Feeding Volume–Traveling Speed Coupling Systems of Rice Harvesters in Southern China. Appl. Sci. 2023, 13, 4876. [Google Scholar] [CrossRef]
- Li, B.; Lecourt, J.; Bishop, G. Advances in non-destructive early assessment of fruit ripeness towards defining optimal time of harvest and yield prediction—A review. Plants 2018, 7, 3. [Google Scholar] [CrossRef]
- Li, W.; Pei, Y.; Zhang, C.; Kottapalli, A.G.P. Bioinspired designs and biomimetic applications of triboelectric nanogenerators. Nano Energy 2021, 84, 105865. [Google Scholar] [CrossRef]
- Shahrubudin, N.; Lee, T.C.; Ramlan, R. An overview on 3D printing technology: Technological, materials, and applications. Procedia Manuf. 2019, 35, 1286–1296. [Google Scholar] [CrossRef]
- Whenish, R.; Antony, M.M.; Balaji, T.; Selvam, A.; Ramprasath, L.S.; Velu, R. Design and performance of additively manufactured lightweight bionic hand. In Proceedings of the 3rd International Conference on “Advancements in Aeromechanical Materials for Manufacturing”: ICAAMM-2020, Hyderabad, India, 24–25 July 2020; AIP Publishing: New York, NY, USA, 2021. [Google Scholar]
- Maskey, B.; Bhattarai, R.; Bhattarai, G.; Shrestha, N.K. Post-harvest quality of fresh akabare chili (Capsicum chinese) as affected by hydrocooling, package modification and storage temperature. Int. J. Food Prop. 2021, 24, 163–173. [Google Scholar] [CrossRef]
- Huang, C.; Mees, O.; Zeng, A.; Burgard, W. Visual language maps for robot navigation. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; IEEE: New York, NY, USA, 2023. [Google Scholar]
- Elsisi, M.; Zaini, H.G.; Mahmoud, K.; Bergies, S.; Ghoneim, S.S. Improvement of trajectory tracking by robot manipulator based on a new co-operative optimization algorithm. Mathematics 2021, 9, 3231. [Google Scholar] [CrossRef]
- Yang, Y.; Shi, J.; Liu, Z.; Liu, S. Vibration and position tracking control for a flexible Timoshenko robot arm with disturbance rejection mechanism. Assem. Autom. 2022, 42, 248–257. [Google Scholar] [CrossRef]
- Mello, R.C.; Scheidegger, W.M.; Múnera, M.C.; Cifuentes, C.A.; Ribeiro, M.R.; Frizera-Neto, A. The PoundCloud framework for ROS-based cloud robotics: Case studies on autonomous navigation and human–robot interaction. Robot. Auton. Syst. 2022, 150, 103981. [Google Scholar] [CrossRef]
- Varlamis, I.; Kontopoulos, I.; Tserpes, K.; Etemad, M.; Soares, A.; Matwin, S. Building navigation networks from multi-vessel trajectory data. Geoinformatica 2021, 25, 69–97. [Google Scholar] [CrossRef]
- Pan, S. Design of intelligent robot control system based on human–computer interaction. Int. J. Syst. Assur. Eng. Manag. 2023, 14, 558–567. [Google Scholar] [CrossRef]
- Lewis, G.S.; Mischler, D.; Wee, H.; Reid, J.S.; Varga, P. Finite element analysis of fracture fixation. Curr. Osteoporos. Rep. 2021, 19, 403–416. [Google Scholar] [CrossRef]
- Gyurkó, Z.; Nemes, R. Aspects of size effect on discrete element modeling of concrete. Pollack Period. 2022, 17, 36–42. [Google Scholar] [CrossRef]
- Gomez, E.F.; Wanasinghe, S.V.; Flynn, A.E.; Dodo, O.J.; Sparks, J.L.; Baldwin, L.A.; Tabor, C.E.; Durstock, M.F.; Konkolewicz, D.; Thrasher, C.J. 3D-printed self-healing elastomers for modular soft robotics. ACS Appl. Mater. Interfaces 2021, 13, 28870–28877. [Google Scholar] [CrossRef] [PubMed]
- Bagha, A.K.; Bahl, S. Finite element analysis of VGCF/pp reinforced square representative volume element to predict its mechanical properties for different loadings. Mater. Today Proc. 2021, 39, 54–59. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | 1 | 2 | 3 | 4 | 5 | 6 | Average Value | Mean Square Deviation | |
|---|---|---|---|---|---|---|---|---|---|
| Separating Force | |||||||||
| F1 | 2.88 | 2.21 | 1.15 | 2.41 | 3.11 | 2.66 | 2.40 | 0.39 | |
| F2 | 9.57 | 8.49 | 9.20 | 7.25 | 8.56 | 9.87 | 8.82 | 0.84 | |
| Sample Number | 1 | 2 | 3 | 4 | 5 | 6 | Average Value | Mean Square Deviation | |
|---|---|---|---|---|---|---|---|---|---|
| Parameters | |||||||||
| Maximum thickness of pericarp (mm) | 3.2 | 3.4 | 3.0 | 4.0 | 2.9 | 3.5 | 3.3 | 0.22 | |
| Maximum diameter of fruiting body (mm) | 24.2 | 24.3 | 26.0 | 20.8 | 25.2 | 21.3 | 23.7 | 1.93 | |
| Fruiting body length (cm) | 13.8 | 15.2 | 15.8 | 16.1 | 16.2 | 14.2 | 15.2 | 0.93 | |
| Sample mass (g) | 35 | 42 | 46 | 52 | 48 | 37 | 43.3 | 1.49 | |
| Material | Modulus of Elasticity (N/mm2) | Poisson’s Ratio | Density (g/cm3) | Permissible Stress (Mpa) |
|---|---|---|---|---|
| 1060 aluminum alloy | 69 | 0.33 | 2.78 | 126 |
| Material | Modulus of Elasticity (N/mm2) | Poisson’s Ratio | Density (g/cm3) | Permissible Stress (Mpa) |
|---|---|---|---|---|
| PLA plastic | 2.7 | 0.351 | 1.10 | 24.5 |
| Serial Number | 1 | 2 | 3 | 4 | 5 | 6 | Average Value | Average Breakage Rates (%) | |
|---|---|---|---|---|---|---|---|---|---|
| End-Effector Shape | |||||||||
| The Vicia faba L. fruit | 0 | 0 | 1 | 0 | 0 | 1 | 0.33 | 1.7 | |
| The Abelmoschus esculentus fruit | 2 | 1 | 1 | 0 | 2 | 1 | 1.17 | 5.8 | |
| The upper jaw of a Lucanidae | 1 | 0 | 2 | 0 | 1 | 1 | 0.83 | 4.2 | |
| The Procambarus clarkii claw | 2 | 3 | 0 | 1 | 1 | 2 | 1.50 | 7.5 | |
| Serial Number | 1 | 2 | 3 | 4 | 5 | 6 | Average Value | Average Drop Rates (%) | |
|---|---|---|---|---|---|---|---|---|---|
| End-Effector Shape | |||||||||
| The Vicia faba L. fruit | 0 | 1 | 2 | 0 | 0 | 1 | 0.67 | 3.3 | |
| The Abelmoschus esculentus fruit | 2 | 1 | 1 | 0 | 2 | 3 | 1.50 | 7.5 | |
| The upper jaw of a Lucanidae | 1 | 0 | 2 | 1 | 3 | 1 | 1.33 | 6.7 | |
| The Procambarus clarkii claw | 2 | 0 | 1 | 1 | 2 | 3 | 1.50 | 7.5 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, L.; Liu, T.; Jiang, P.; Qi, A.; He, Y.; Li, Y.; Yang, M.; Deng, X. Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers. Agronomy 2023, 13, 2231. https://doi.org/10.3390/agronomy13092231
Deng L, Liu T, Jiang P, Qi A, He Y, Li Y, Yang M, Deng X. Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers. Agronomy. 2023; 13(9):2231. https://doi.org/10.3390/agronomy13092231
Chicago/Turabian StyleDeng, Lexing, Tianyu Liu, Ping Jiang, Aolin Qi, Yuchen He, Yujie Li, Mingqin Yang, and Xin Deng. 2023. "Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers" Agronomy 13, no. 9: 2231. https://doi.org/10.3390/agronomy13092231
APA StyleDeng, L., Liu, T., Jiang, P., Qi, A., He, Y., Li, Y., Yang, M., & Deng, X. (2023). Design and Testing of Bionic-Feature-Based 3D-Printed Flexible End-Effectors for Picking Horn Peppers. Agronomy, 13(9), 2231. https://doi.org/10.3390/agronomy13092231