
Maximum Instantaneous Wind Speed Forecasting and Performance Evaluation by Using Numerical Weather Prediction and On-Site Measurement


Abstract
:1. Introduction
2. Forecast Model
2.1. Input Data
2.2. Forecast Model
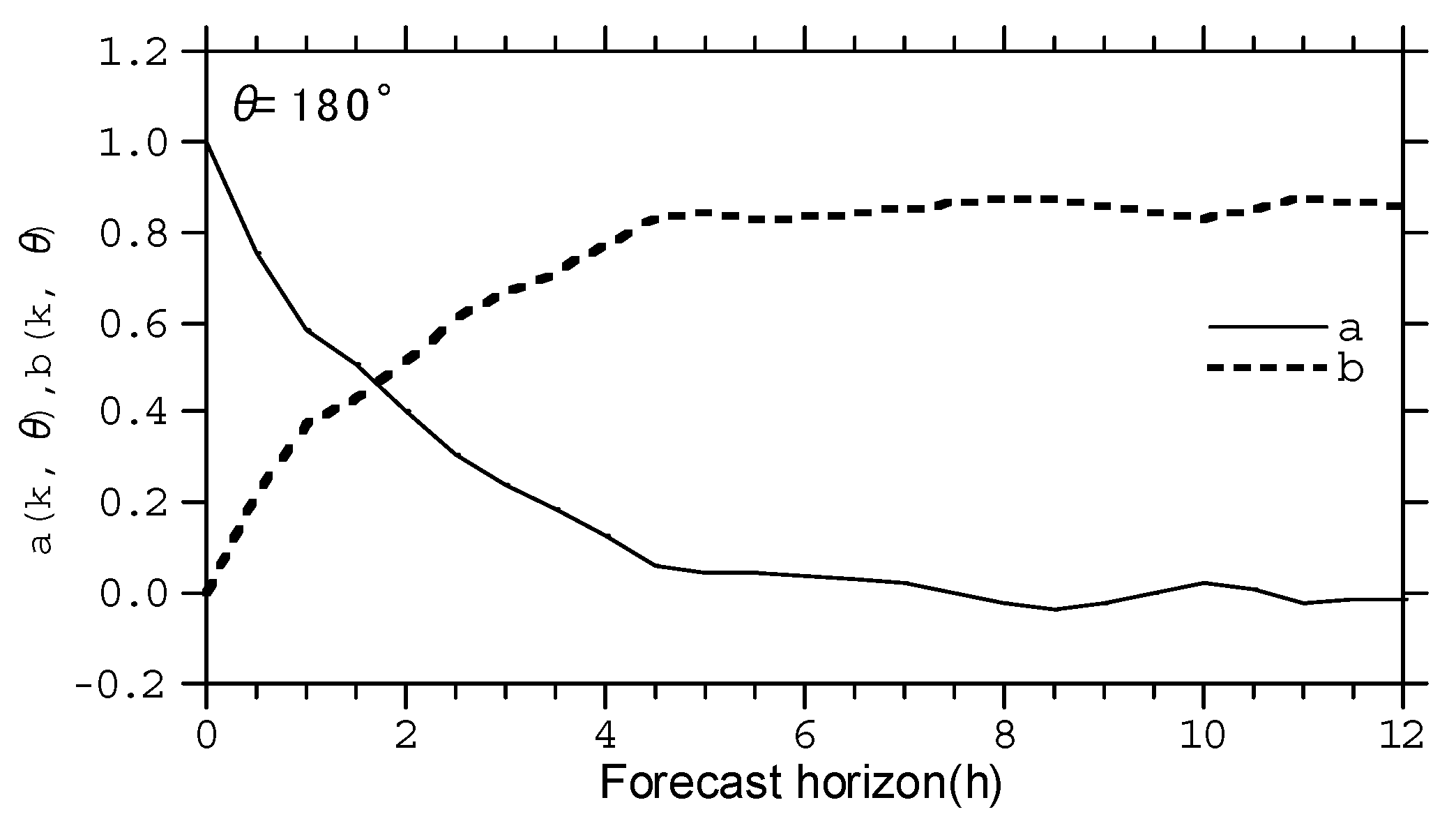
2.3. Non-Parametric Regression with Forgetting Factor
3. Forecast Results and Error Evaluation
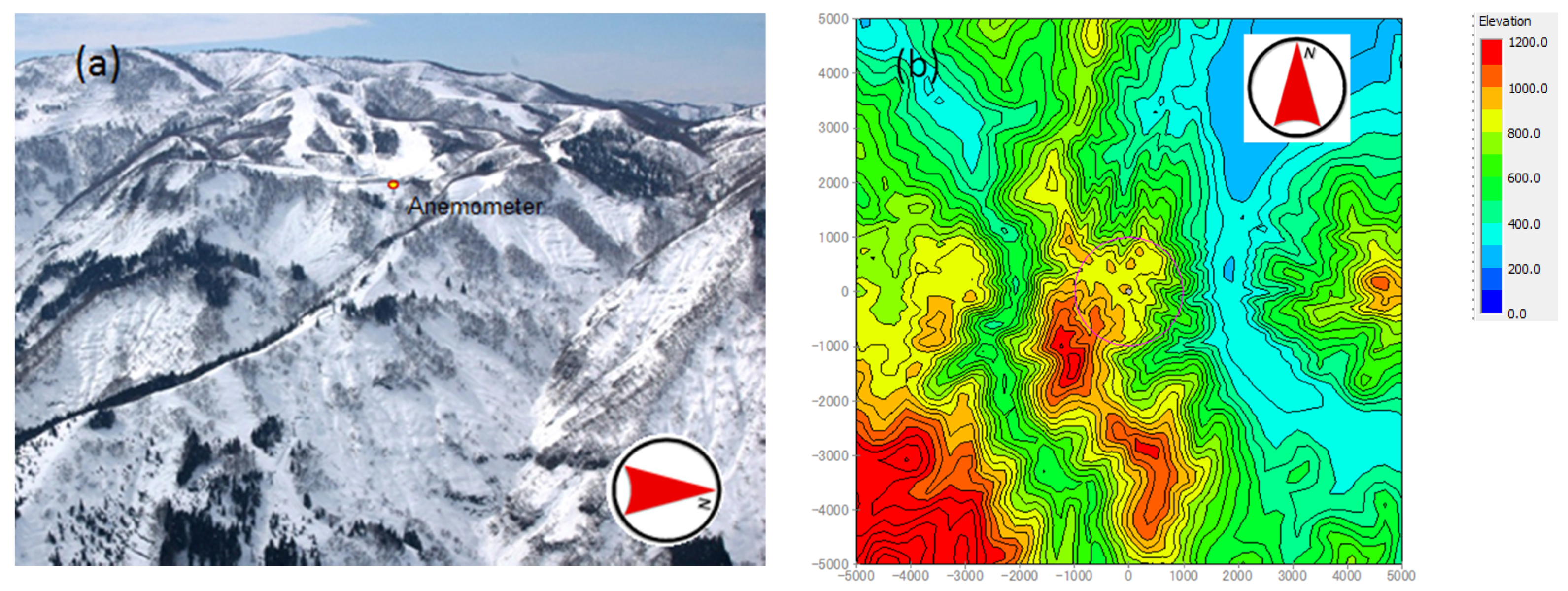
3.1. Analysis Conditions
3.2. Forecast Examples and Comparative Models
3.3. Evaluation of Forecast Results
3.4. Optimal Quantile Level of the Maximum Instantaneous Wind Speed
4. Conclusions
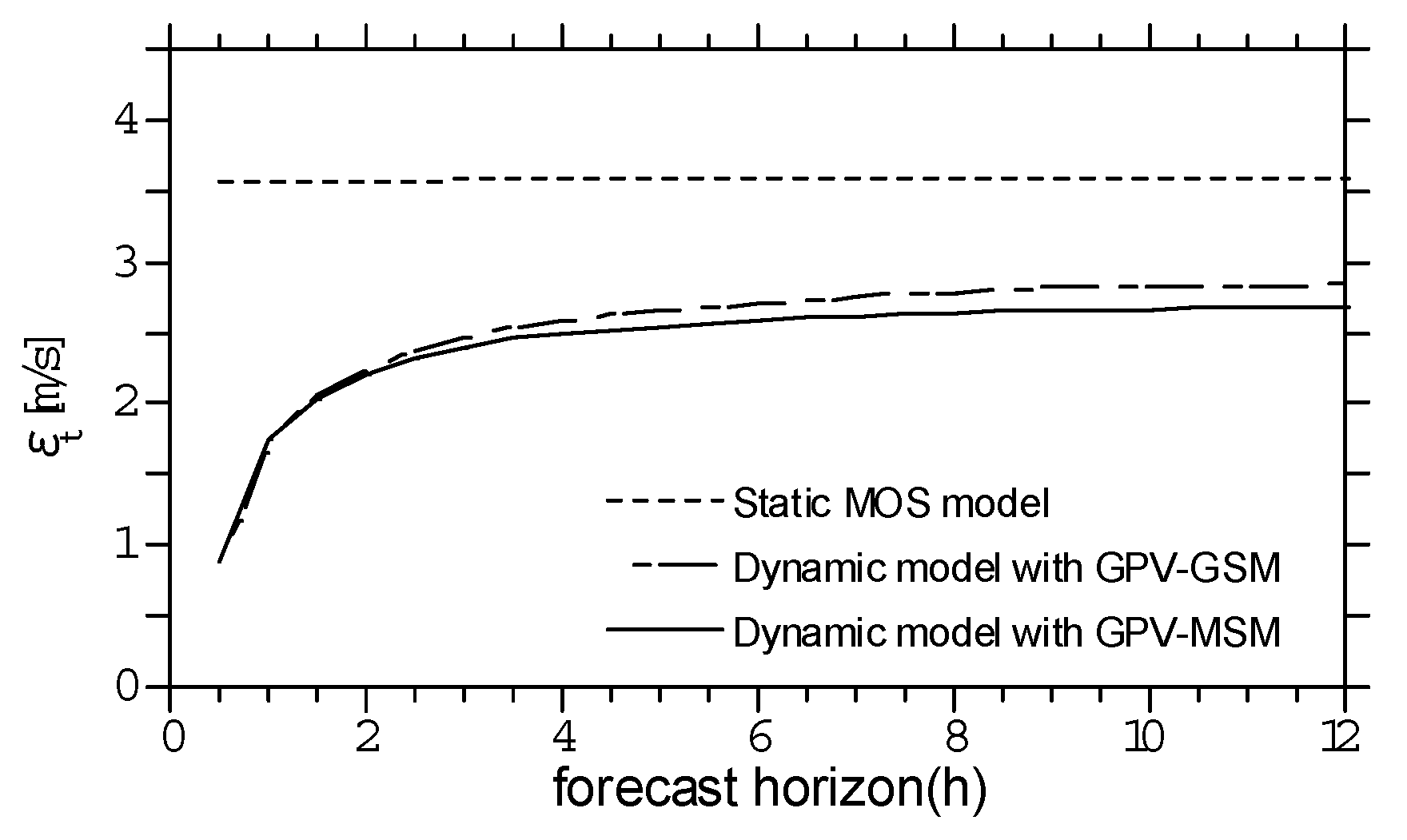
- The maximum instantaneous wind speed forecast model is constructed using the ARX model. A non-parametric regression with multiple time scale forgetting factors is proposed to identify the model parameters. The maximum instantaneous wind speeds calculated using the proposed dynamic model show favorable agreement with the measurements, whereas the conventional static MOS model underestimates them.
- The prediction accuracy of the maximum instantaneous wind speed forecast is improved when high-resolution forecast data are used as the input NWP and when multiple time scale forgetting factors are adopted for the proposed dynamic model.
- The predictability of a strong wind event with a maximum instantaneous wind speed of 15 m/s or more has been evaluated using the ROC curve and the AUC. The proposed dynamic model increases the true positive rate and the AUC increases from 0.84 in the static MOS model to 0.94 in the proposed dynamic model.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Non-Parametric Regression with Forgetting Factors
References
- Misu, Y.; Ishihara, T. Prediction of frequency distribution of strong crosswind in a control section for train operations by using onsite measurement and numerical simulation. J. Wind Eng. Ind. Aerodyn. 2018, 174, 69–79. [Google Scholar] [CrossRef]
- Kobayashi, N.; Shimamura, M. Study of a strong wind warning system. JR East. Tech. Rev. 2003, 2, 61–65. Available online: https://www.jreast.co.jp/e/development/tech/pdf_2/61-65.pdf (accessed on 31 December 2020).
- Hoppmann, U.; Koenig, S.; Tielkes, T.; Matschke, G. A short-term strong wind prediction model for railway application: Design and verification. J. Wind Eng. Ind. Aerodyn. 2002, 90, 1127–1134. [Google Scholar] [CrossRef]
- Giebel, G.; Landberg, L.; Kariniotakis, G.N.; Brownsword, R. State-of-the-art on methods and software tools for short-term prediction of wind energy production. In Proceedings of the European Wind Energy Conference & Exhibition EWEC, Madrid, Spain, 16–19 June 2003. [Google Scholar]
- Giebel, G.; Brownsword, R.; Kariniotakis, G.N.; Denhard, M.; Draxl, C. The State of the Art in Short-Term Prediction of Wind Power: A Literature Overview; ANEMOS.plus: Roskilde, Denmark, 2011. [Google Scholar] [CrossRef]
- Landberg, L. Short-Term Prediction of Local Wind Conditions; Risø-R-702(EN); Risø National Laboratory: Roskilde, Denmark, 1994; ISBN 87-550-1916-1. [Google Scholar]
- Landberg, L. Short-term prediction of local wind conditions. J. Wind Eng. Ind. Aerodyn. 2001, 89, 235–245. [Google Scholar] [CrossRef] [Green Version]
- Sideratos, G.; Hatziargyriou, N.D. An advanced statistical method for wind power forecasting. IEEE Trans. Power Syst. 2007, 22, 258–265. [Google Scholar] [CrossRef]
- Soman, S.S.; Zareipour, H.; Malik, O.; Mandal, P. A review of wind power and wind speed forecasting methods with different timehorizons. In Proceedings of the North-American Power Symposium 2010, Arlington, TX, USA, 26–28 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Giebel, G.; Kariniotakis, G. Wind power forecasting—A review of the state of the art. In Renewable Energy Forecasting: From Models to Applications; Woodhead Publishing: Cambridge, UK, 2017; ISBN 978-0081005040. [Google Scholar]
- Dittner, M.E.; Vasel, A. Advances in Wind Power Forecasting. In Advances in Sustainable Energy; Springer: Cham, Switzerland, 2019; ISBN 978-3-030-05635-3. [Google Scholar]
- Dhiman, H.S.; Deb, D.; Balas, V.E. Supervised Machine Learning in Wind Forecasting and Ramp Event Prediction; Academic Press: Cambridge, MA, USA, 2020; ISBN 9780128213674. [Google Scholar]
- Joensen, A.; Madsen, H.; Nielsen, T.S. Non-parametric Statistical Method for Wind Power Prediction. In Proceedings of the European Wind Energy Conference, Dublin Castle, Ireland, 6–9 October 1997. [Google Scholar]
- Pinson, P.; Nielsen, H.A.; Møller, J.K.; Madsen, H.; Kariniotakis, G.N. Non-parametric probabilistic forecasts of wind power: Required properties and evaluation. Wind Energy 2007, 10, 497–516. [Google Scholar] [CrossRef]
- Ishizaki, H. Wind profiles, turbulence intensities and gust factors for design in typhoon-prone regions. J. Wind Eng. Ind. Aerodyn. 1983, 13, 55–66. [Google Scholar] [CrossRef]
- Saito, K.; Ikawa, M. A numerical study of the local downslope wind “Yamaji-kaze” in Japan. J. Meteorol. Soc. Jpn. 1991, 69, 31–56. [Google Scholar] [CrossRef] [Green Version]
- Meng, Z.; Zhang, F. Tests of an ensemble Kalman filter for mesoscale and regional-scale data assimilation. Part III: Comparison with 3DVAR in a real-data case study. Mon. Weather Rev. 2008, 136, 522–540. [Google Scholar] [CrossRef]
- Mohrlen, C.; Jorgensen, J. A new algorithm for upscaling and short-term forecasting of wind power using ensemble forecasts. In Proceedings of the 8th International Workshop on Large Scale Integration of Wind Power and on Transmission Networks for Offshore Wind Forms, Bremen, Germany, 14–15 October 2009. [Google Scholar]
- Sweats, J.A. Indices of discrimination or diagnostic accuracy: Their ROCs and implied models. Psychol. Bull. 1986, 99, 100–117. [Google Scholar] [CrossRef]
- Donaldson, R.J.; Dyer, R.M.; Kraus, M.J. An objective evaluator of techniques for predicting severe weather events. In Proceedings of the 9th Conference on Server Local Storms; American Meteorological Society: Boston, MA, USA, 1975; pp. 321–326. [Google Scholar]
- Swets, J.A. Measuring the accuracy of diagnostic systems. Science 1988, 240, 1285–1293. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kikuchi, Y.; Fukushima, M.; Ishihara, T. Assessment of a coastal offshore wind climate by means of mesoscale model simulations considering high-resolution land use and sea surface temperature data sets. Atmosphere 2020, 11, 379. [Google Scholar] [CrossRef] [Green Version]
- Goit, J.P.; Yamaguchi, A.; Ishihara, T. Measurement and prediction of wind fields at an offshore site by scanning Doppler LiDAR and WRF. Atmosphere 2020, 11, 442. [Google Scholar] [CrossRef]
- Pinson, P.; Chevallier, C.; Kariniotakis, G.N. Trading Wind Generation from Short-Term Probabilistic Forecasts of Wind Power. IEEE Trans. Power Syst. 2007, 22, 1148–1156. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | GPV-MSM | GPV-GSM (Japan Area) |
|---|---|---|
| Forecast horizon | 39 h | 84 h |
| Delivery time | About 3 h after initial time | About 3 h after initial time |
| Temporal resolution | 1 h (surface), 3 h (barometric level) | |
| Initial time (JST) | 3:00, 9:00, 15:00, 21:00 | 3:00, 9:00, 15:00, 21:00 |
| Forecast variables | Sea surface rehabilitation pressure (ground surface), altitude (pressure surface), horizontal wind, updraft, temperature, relative humidity, accumulated precipitation | |
| Number of vertical layers | 60 layers | |
| Horizontal discretization scheme and resolution | Grid point model resolution: 20 km | Spectrum model cut-off wave number: 519 |
| Output horizontal grid resolution (surface) | 0.05 degrees north-south × 0.0625 degrees east-west | 0.2 degrees north-south × 0.25 degrees east-west |
| Output Domain | 22.4° N–47.6° N, 120° E–150° E | 20° N–50° N, 120° E–150° E |
| Date and Time Weather Conditions | Maximum Instantaneous Wind Speed (m/s) | Date and Time Weather Conditions | Maximum Instantaneous Wind Speed (m/s) |
|---|---|---|---|
| 2014/01/30 16:00 South-coast cyclone | 15.3 | 2015/01/31 07:30 Siberian High and Aleutian Low | 15.5 |
| 2014/01/31 13:00 Siberian High and Aleutian Low | 15.6 | 2015/02/01 10:00 Siberian High and Aleutian Low | 15.0 |
| 2014/02/05 10:30 Siberian High and Aleutian Low | 15.1 | 2015/02/13 15:00 Siberian High and Aleutian Low | 15.9 |
| 2014/02/16 12:00 Siberian High and Aleutian Low | 21.2 | 2015/02/15 14:30 Siberian High and Aleutian Low | 16.0 |
| 2014/03/06 10:30 Siberian High and Aleutian Low | 15.3 | 2015/02/26 07:30 South-coast cyclone | 15.7 |
| 2014/03/10 12:30 Siberian High and Aleutian Low | 16.2 | 2015/02/27 12:30 Siberian High and Aleutian Low | 15.7 |
| 2014/03/20 06:30 South-coast cyclone | 15.7 | 2015/03/01 06:00 South-coast cyclone | 15.2 |
| 2014/03/21 06:30 Siberian High and Aleutian Low | 16.2 | 2015/03/02 07:00 Siberian High and Aleutian Low | 20.1 |
| 2014/03/30 10:00 South-coast cyclone | 18.8 | 2015/03/03 16:30 South-coast cyclone | 15.5 |
| 2014/03/31 06:00 Siberian High and Aleutian Low | 19.4 | 2015/03/09 06:00 South-coast cyclone | 15.4 |
| 2014/12/16 06:30 South-coast cyclone | 17.8 | 2015/03/10 17:00 Siberian High and Aleutian Low | 15.5 |
| 2014/12/18 15:30 Siberian High and Aleutian Low | 17.6 | 2015/12/11 14:30 Siberian High and Aleutian Low | 17.4 |
| 2014/12/20 07:00 South-coast cyclone | 16.3 | 2016/01/04 18:00 Siberian High and Aleutian Low | 15.9 |
| 2015/01/06 15:30 Siberian High and Aleutian Low | 17.8 | 2016/01/18 06:00 South-coast cyclone | 21.8 |
| 2015/01/07 07:00 Siberian High and Aleutian Low | 16.2 | 2016/01/20 07:30 Siberian High and Aleutian Low | 17.9 |
| 2015/01/17 13:00 Siberian High and Aleutian Low | 15.1 | 2016/02/09 16:00 Siberian High and Aleutian Low | 17.1 |
| 2015/01/22 10:30 South-coast cyclone | 15.8 | 2016/02/10 06:00 Siberian High and Aleutian Low | 16.7 |
| 2015/01/23 11:30 Siberian High and Aleutian Low | 15.1 | 2016/03/01 06:00 Siberian High and Aleutian Low | 16.8 |
| Parameter | Value | |
|---|---|---|
| Forgetting factor | 0.917 (peak factor estimation) 0.999 (other than that) | |
| Bandwidth | Wind speed | 4.0 (m/s) |
| Wind direction | 11.25 (deg) | |
| Forecast horizon | 0.5 (h) | |
| Measurement | |||
|---|---|---|---|
| Yes | None | ||
| Forecast | Yes | a (True positive) | b (False positive) |
| None | c (False negative) | d (True negative) | |
| Model | AUC |
|---|---|
| Static MOS model | 0.84 |
| Dynamic model with GPV-GSM | 0.92 |
| Dynamic model with GPV-MSM | 0.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamaguchi, A.; Ishihara, T. Maximum Instantaneous Wind Speed Forecasting and Performance Evaluation by Using Numerical Weather Prediction and On-Site Measurement. Atmosphere 2021, 12, 316. https://doi.org/10.3390/atmos12030316
Yamaguchi A, Ishihara T. Maximum Instantaneous Wind Speed Forecasting and Performance Evaluation by Using Numerical Weather Prediction and On-Site Measurement. Atmosphere. 2021; 12(3):316. https://doi.org/10.3390/atmos12030316
Chicago/Turabian StyleYamaguchi, Atsushi, and Takeshi Ishihara. 2021. "Maximum Instantaneous Wind Speed Forecasting and Performance Evaluation by Using Numerical Weather Prediction and On-Site Measurement" Atmosphere 12, no. 3: 316. https://doi.org/10.3390/atmos12030316
APA StyleYamaguchi, A., & Ishihara, T. (2021). Maximum Instantaneous Wind Speed Forecasting and Performance Evaluation by Using Numerical Weather Prediction and On-Site Measurement. Atmosphere, 12(3), 316. https://doi.org/10.3390/atmos12030316