
High-Order Semi-Lagrangian Schemes for the Transport Equation on Icosahedron Spherical Grids

Abstract
:1. Introduction
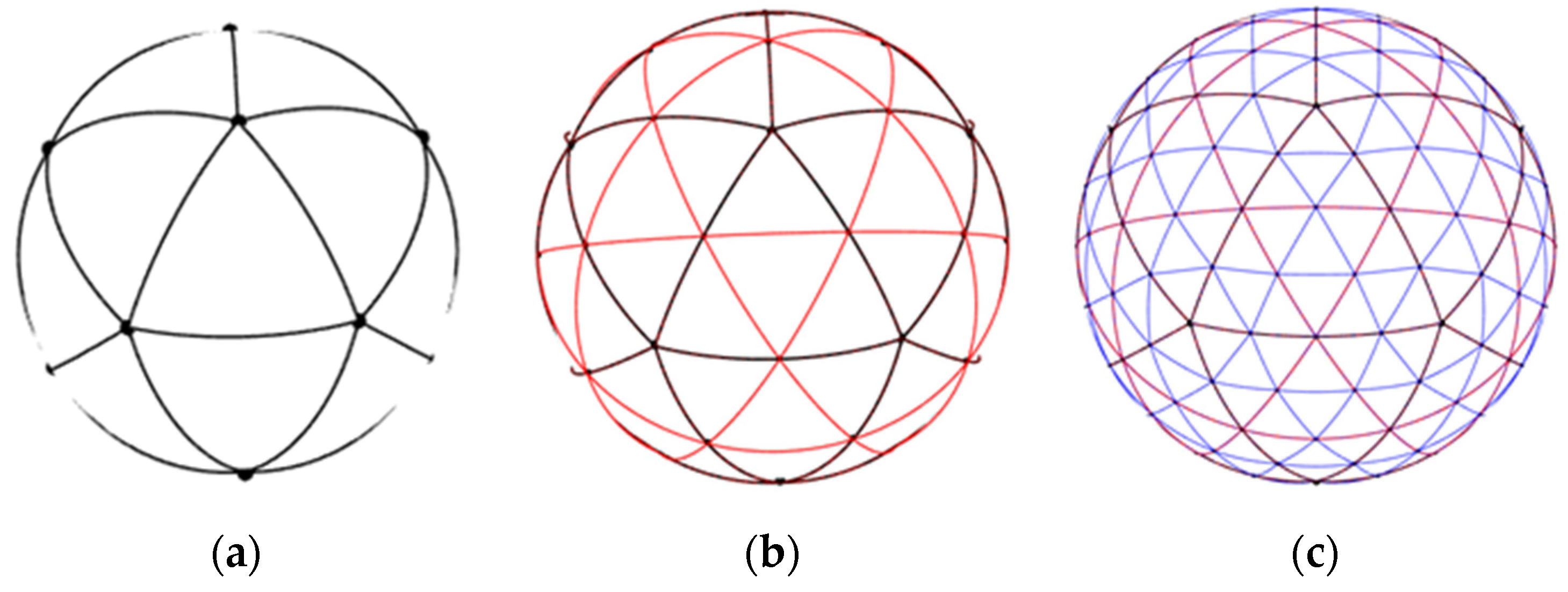
2. Triangle Mesh Generation on a Sphere
3. High-Order Semi-Lagrangian Method
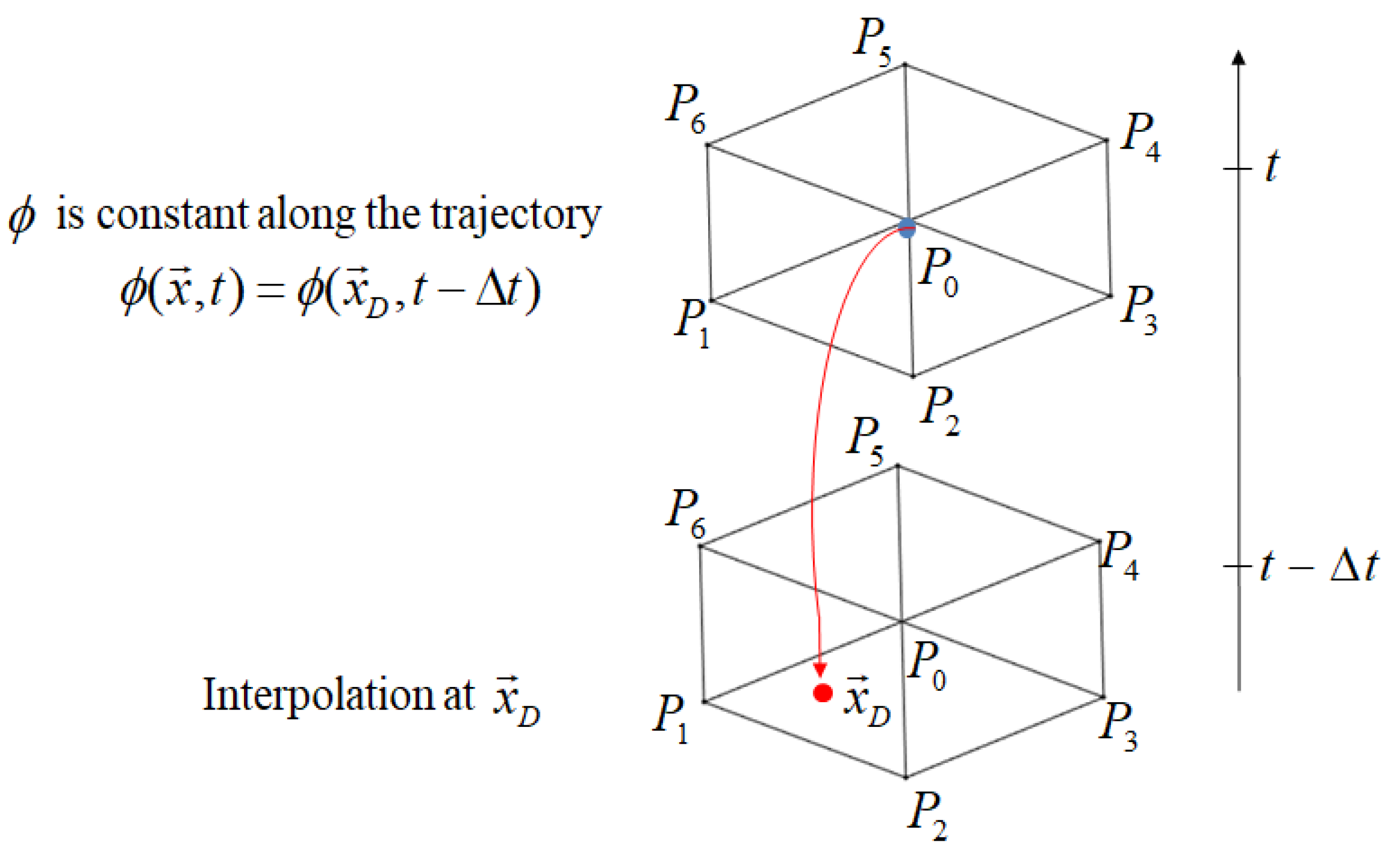
3.1. Approximation for Departure Point
3.1.1. Ritchie’s Method
3.1.2. High-Order Runge–Kutta Methods
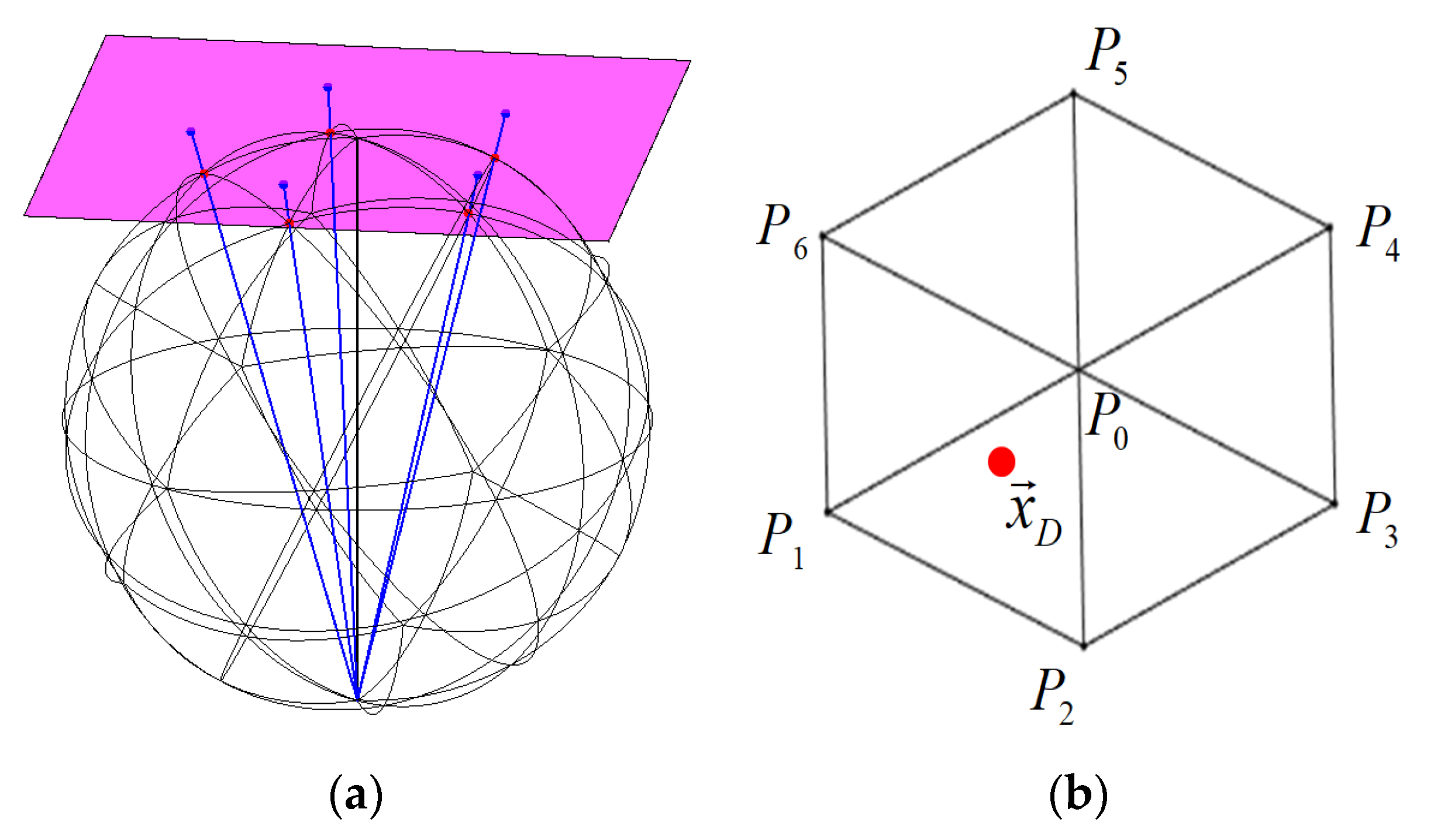
3.2. Interpolation
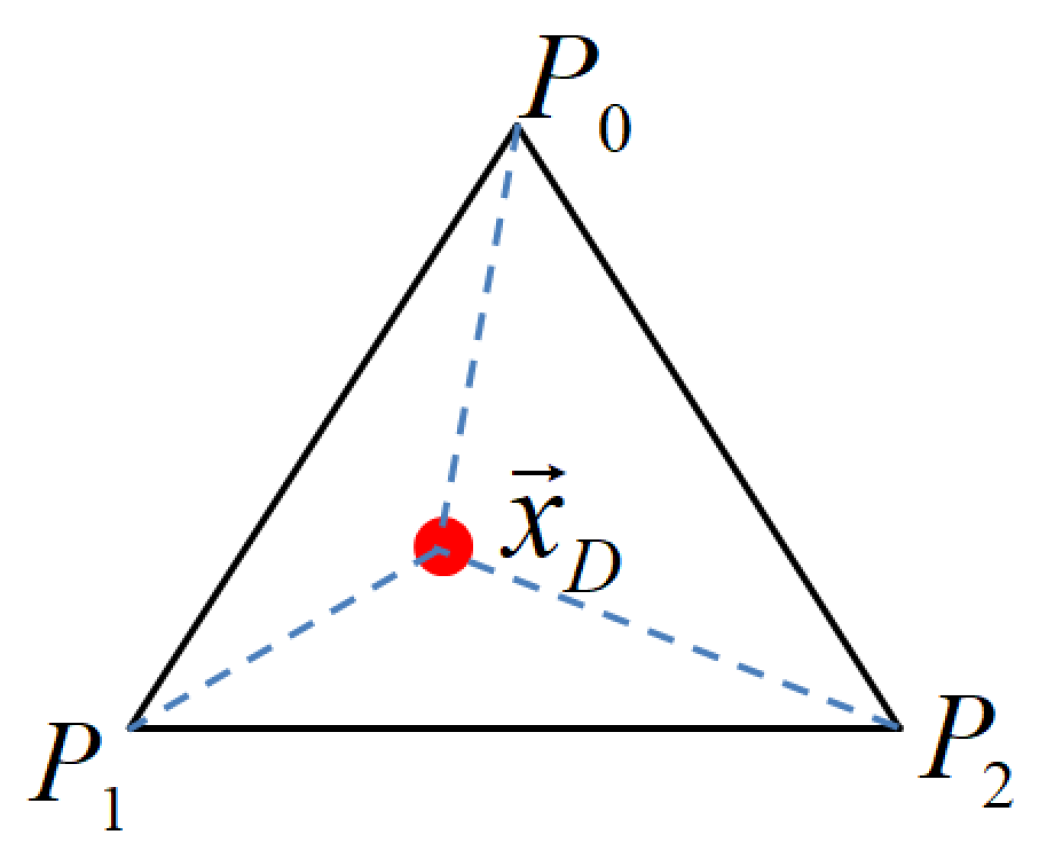
3.2.1. Linear Interpolation
3.2.2. Local Polynomial Fitting by Least-Square Method (Poly-LSQ)
3.2.3. Global RBFs
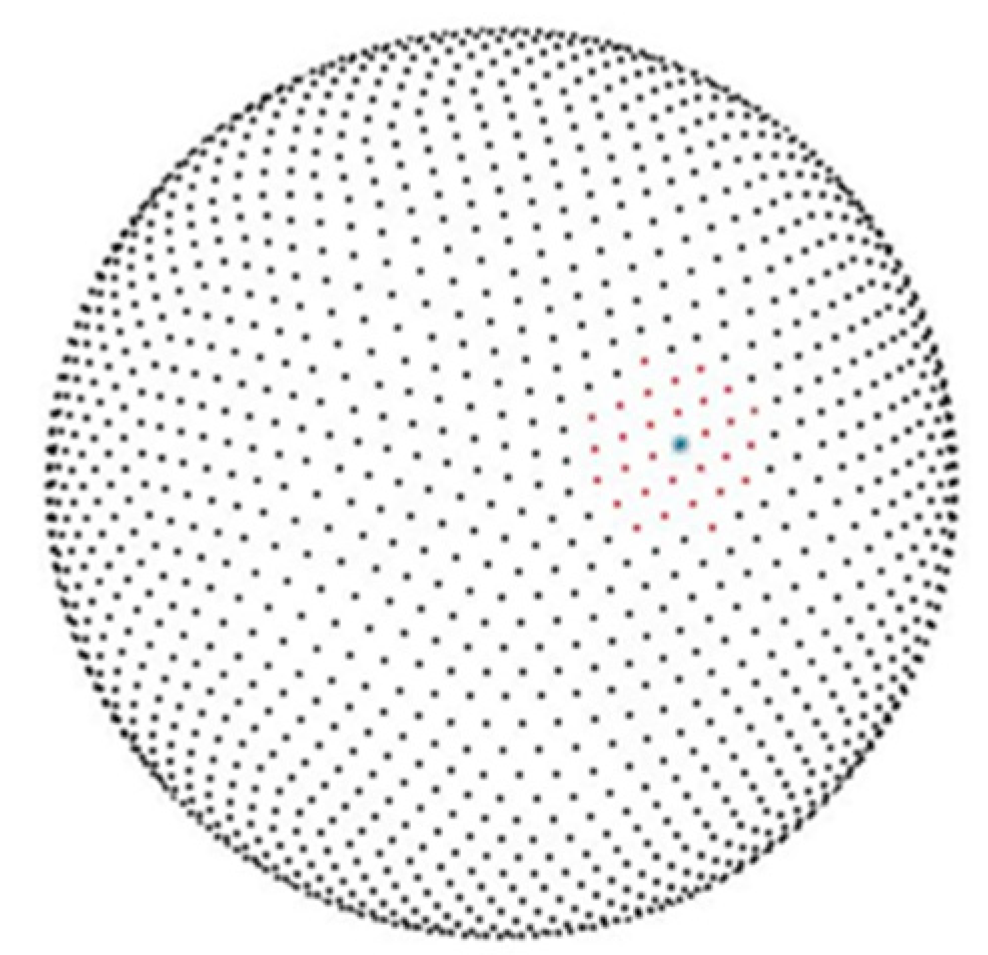
3.2.4. Local RBFs
4. Trajectory Accuracy and Mass Conservation Evaluation
4.1. Trajectory Accuracy
4.2. Mass Conservations
5. Numerical Experiments
6. Conclusions
- (1)
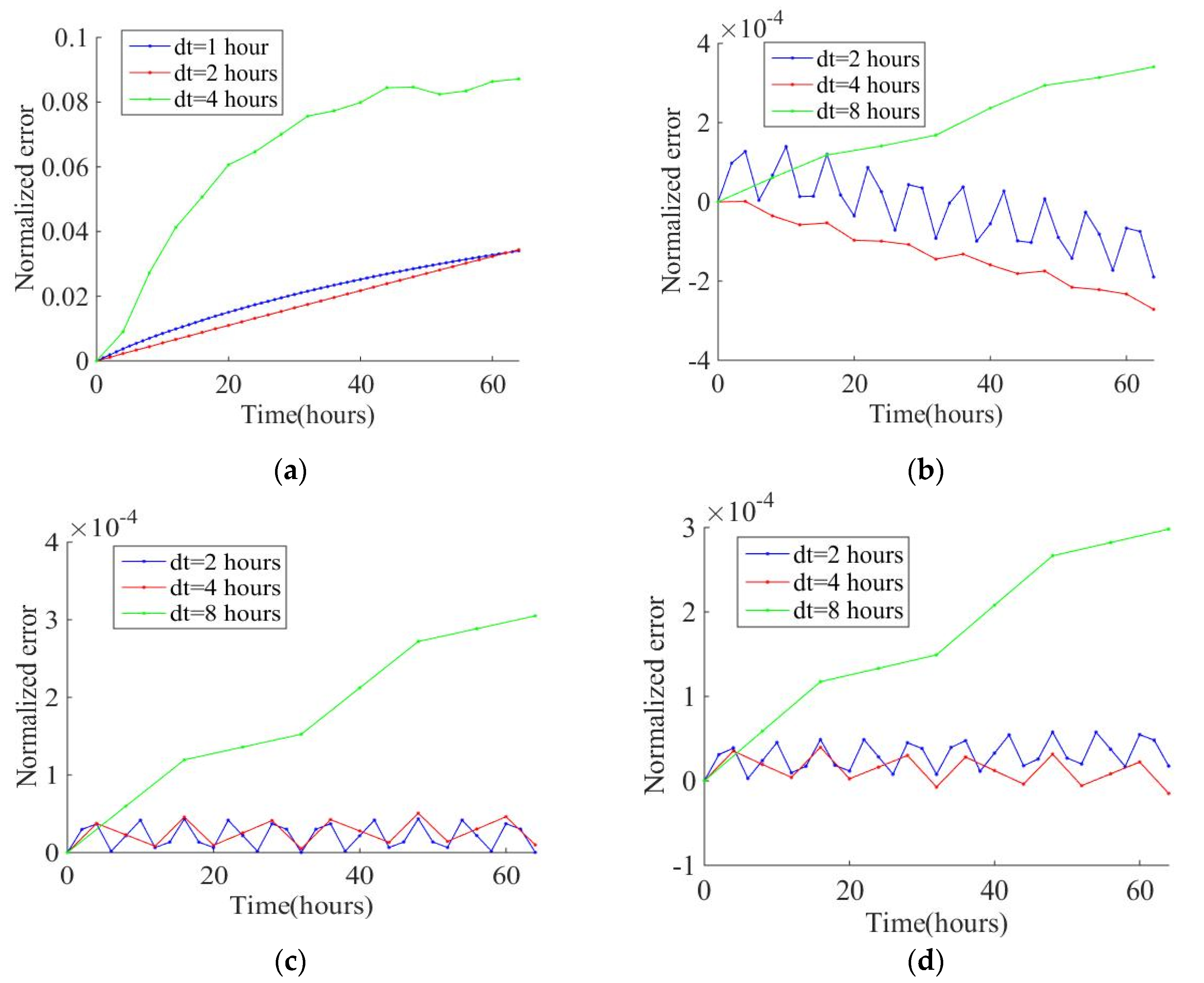
- Although the semi-Lagrangian method is not constrained by the CFL number, the time step for backward integration could not be too large arbitrarily, especially for flows of complex structures;
- (2)
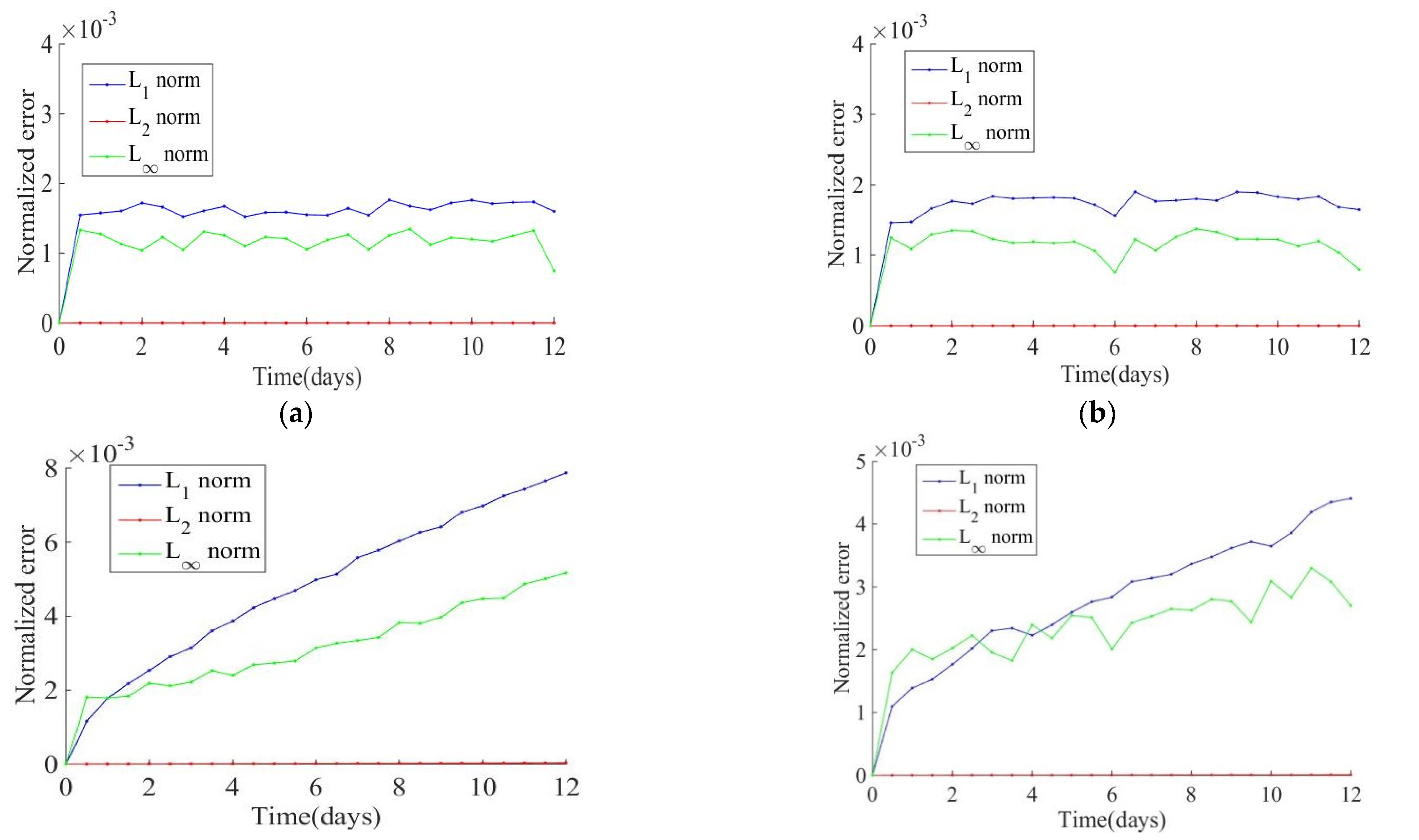
- A high-order explicit integration method could be utilized to solve the characteristic equation in order to obtain more accurate locations of departure points. The SL method does not guarantee mass conservation; however, the mass is conserved well in test cases for numerical experiments when the solution is smooth;
- (3)
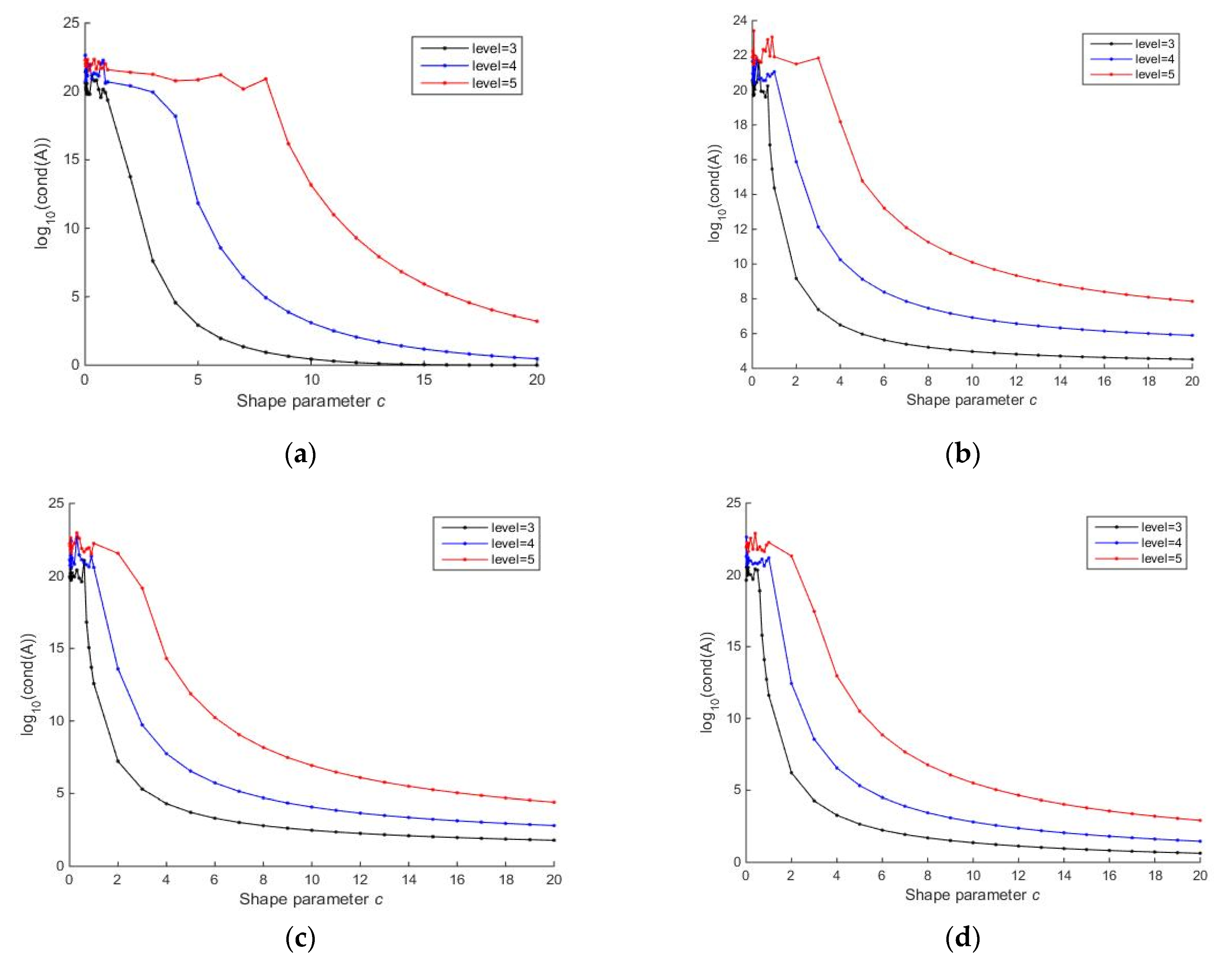
- Among different interpolation methods, results obtained by the linear interpolation method show too much diffusion, especially in the great gradient region of the solution. Compared to linear interpolation, more accurate results could be obtained by the Poly-LSQ method and the global or local RBF interpolation method. However, the value of the shape parameter for the basic function is key to the RBF interpolation. AN inappropriate value would cause a great loss of accuracy in the interpolation results, even numerical instability. It costs a lot of effort to select an optimal value. While this problem does not occur for the linear and Poly-LSQ methods. When the solution is not smooth, it tends to generate small ripples in the steep gradient region of the solution if the Poly-LSQ method, global RBFs, or local RBFs would be utilized. Therefore, the techniques to suppress numerical oscillations should be developed in further research;
- (4)
- Essentially, the proposed SL method is meshless and implemented in 3D Cartesian coordinates; it could be extended to other kinds of grids on the sphere directly.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, M.; Lv, G.; Zhou, C.; Lin, H.; Ma, Z.; Yue, S.; Wen, Y.; Zhang, F.; Wang, J.; Zhu, Z.; et al. Geographic modeling and simulation systems for geographic research in the new era: Some thoughts on their development and construction. Sci. China Earth Sci. 2021, 64, 1207–1223. [Google Scholar] [CrossRef]
- Chen, M.; Voinov, A.; Ames, D.P.; Kettner, A.J.; Goodall, J.L.; Jakeman, A.J.; Barton, M.C.; Harpham, Q.; Cuddy, S.M.; DeLuca, C.; et al. Position paper: Open web-distributed integrated geographic modelling and simulation to enable broader participation and applications. Earth-Sci. Rev. 2020, 207, 103223. [Google Scholar] [CrossRef]
- Lü, G.; Batty, M.; Strobl, J.; Lin, H.; Zhu, A.-X.; Chen, M. Reflections and speculations on the progress in Geographic Information Systems (GIS): A geographic perspective. Int. J. Geogr. Inf. Sci. 2019, 33, 346–367. [Google Scholar] [CrossRef] [Green Version]
- Prusa, J.M. Computation at a coordinate singularity. J. Comput. Phys. 2018, 361, 331–352. [Google Scholar] [CrossRef]
- Tang, J.; Chen, C.; Shen, X.; Xiao, F.; Li, X. A Positivity-preserving Conservative Semi-Lagrangian Multi-moment Global Transport Model on the Cubed Sphere. Adv. Atmos. Sci. 2021, 38, 1460–1473. [Google Scholar] [CrossRef]
- Staniforth, A.; Thuburn, J. Horizontal grids for global weather and climate prediction models: A review. Q. J. R. Meteorol. Soc. 2012, 138, 1–26. [Google Scholar] [CrossRef]
- Chen, M.; Lü, G.N.; Lu, F.Q.; Wan, G. Grid systems for geographic modelling and simulation: A review. Sci. Found. China 2018, 26, 47–68. [Google Scholar]
- Zerroukat, M.; Allen, T. On the monotonic and conservative transport on overset/Yin–Yang grids. J. Comput. Phys. 2015, 302, 285–299. [Google Scholar] [CrossRef]
- Ivan, L.; De Sterck, H.; Susanto, A.; Groth, C. High-order central ENO finite-volume scheme for hyperbolic conservation laws on three-dimensional cubed-sphere grids. J. Comput. Phys. 2015, 282, 157–182. [Google Scholar] [CrossRef]
- Giorgetta, M.A.; Brokopf, R.; Crueger, T.; Esch, M.; Fiedler, S.; Helmert, J.; Hohenegger, C.; Kornblueh, L.; Köhler, M.; Manzini, E.; et al. ICON-A, the Atmosphere Component of the ICON Earth System Model: I. Model Description. J. Adv. Model. Earth Syst. 2018, 10, 1613–1637. [Google Scholar] [CrossRef]
- Logemann, K.; Linardakis, L.; Korn, P.; Schrum, C. Global tide simulations with ICON-O: Testing the model performance on highly irregular meshes. Ocean Dyn. 2021, 71, 43–57. [Google Scholar] [CrossRef]
- Miura, H.; Skamarock, W.C. An Upwind-Biased Transport Scheme Using a Quadratic Reconstruction on Spherical Icosahedral Grids. Mon. Weather Rev. 2013, 141, 832–847. [Google Scholar] [CrossRef] [Green Version]
- Dubey, S.; Dubos, T.; Hourdin, F.; Upadhyaya, H. On the inter-comparison of two tracer transport schemes on icosahedral grids. Appl. Math. Model. 2015, 39, 4828–4847. [Google Scholar] [CrossRef]
- Diamantakis, M. The Semi-Lagrangian Technique in Atmospheric Modelling: Current Status and Future Challenges. In Proceedings of the ECMWF Seminar in Numerical Methods for Atmosphere and Ocean Modelling, Reading, UK, 2–5 September 2013; pp. 183–200. [Google Scholar]
- Harris, L. A New Semi-Lagrangian Finite Volume Advection Scheme Combines the Best of Both Worlds. Adv. Atmos. Sci. 2021, 38, 1608–1609. [Google Scholar] [CrossRef]
- Fletcher, S.J. Semi-Lagrangian Advection Methods and Their Applications in Geoscience; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar]
- Mittal, R.; Upadhyaya, H.C.; Sharma, O.P. On Near-Diffusion-Free Advection over Spherical Geodesic Grids. Mon. Weather Rev. 2007, 135, 4214–4225. [Google Scholar] [CrossRef]
- Subich, C.J. Higher-order finite volume differential operators with selective upwinding on the icosahedral spherical grid. J. Comput. Phys. 2018, 368, 21–46. [Google Scholar] [CrossRef]
- Ritchie, H. Semi-Lagrangian Advection on a Gaussian Grid. Mon. Weather Rev. 1987, 115, 608–619. [Google Scholar] [CrossRef]
- Giraldo, F.X. Trajectory Calculations for Spherical Geodesic Grids in Cartesian Space. Mon. Weather Rev. 1999, 127, 1651–1662. [Google Scholar] [CrossRef]
- Carfora, M.F. Semi-Lagrangian advection on a spherical geodesic grid. Int. J. Numer. Methods Fluids 2007, 55, 127–142. [Google Scholar] [CrossRef]
- Varun, S.; Wright, G.B. Mesh-free Semi-Lagrangian methods for transport on a sphere using radial basis functions. J. Comput. Phys. 2018, 366, 170–190. [Google Scholar]
- Diamantakis, M.; Filip, V. A fast converging and concise algorithm for computing the departure points in Semi-Lagrangian weather and climate models. J. R. Meteorol. Soc. 2022, 148, 670–684. [Google Scholar] [CrossRef]
- Hossain, B.; Hossain, J.; Miah, M.; Alam, S. A comparative study on fourth order and Butcher’s fifth order Runge-Kutta methods with third order initial value problem (IVP). Appl. Comput. Math. 2017, 6, 243–253. [Google Scholar] [CrossRef]
- Tomitaa, H.; Tsugawaa, M.; Satoha, M.; Gotob, K. Shallow Water Model on a Modified Icosahedral Geodesic Grid by Using Spring Dynamics. J. Comput. Phys. 2001, 174, 579–613. [Google Scholar] [CrossRef]
- Lee, J.-L.; MacDonald, A.E. A Finite-Volume Icosahedral Shallow-Water Model on a Local Coordinate. Mon. Weather Rev. 2009, 137, 1422–1437. [Google Scholar] [CrossRef]
- Dubey, S.; Mittal, R.; Lauritzen, P.H. A flux-form conservative semi-Lagrangian multitracer transport scheme (FF-CSLAM) for icosahedral-hexagonal grids. J. Adv. Model. Earth Syst. 2014, 6, 332–356. [Google Scholar] [CrossRef]
- Fasshauer, G.E. Meshfree Approximation Methods with MATLAB; World Scientific Publishing Co Pte. Ltd.: Singapore, 2007. [Google Scholar]
- Flyer, N.; Wright, G.B. Transport schemes on a sphere using radial basis functions. J. Comput. Phys. 2007, 226, 1059–1084. [Google Scholar] [CrossRef] [Green Version]
- Flyer, N.; Lehto, E. Rotational transport on a sphere: Local node refinement with radial basis functions. J. Comput. Phys. 2010, 229, 1954–1969. [Google Scholar] [CrossRef]
- Parand, K.; Hemami, M. Numerical Study of Astrophysics Equations by Meshless Collocation Method Based on Compactly Supported Radial Basis Function. Int. J. Appl. Comput. Math. 2017, 3, 1053–1075. [Google Scholar] [CrossRef] [Green Version]
- Afiatdoust, F.; Esmaeilbeigi, M. Optimal variable shape parameters using genetic algorithm for radial basis function approximation. Ain Shams Eng. J. 2015, 6, 639–647. [Google Scholar] [CrossRef]
- Fasshauer, G.E.; Zhang, J.G. On choosing “optimal” shape parameters for RBF approximation. Numer. Algorithms 2007, 45, 345–368. [Google Scholar] [CrossRef]
- Uddin, M. On the selection of a good value of shape parameter in solving time-dependent partial differential equations using RBF approximation method. Appl. Math. Model. 2014, 38, 135–144. [Google Scholar] [CrossRef]
- Mongillo, M. Illinois Institute of Technology Choosing Basis Functions and Shape Parameters for Radial Basis Function Methods. SIAM Undergrad. Res. Online 2011, 4, 190–209. [Google Scholar] [CrossRef]
- Cavoretto, R.; De Rossi, A.; Mukhametzhanov, M.S.; Sergeyev, Y.D. On the search of the shape parameter in radial basis functions using univariate global optimization methods. J. Glob. Optim. 2021, 79, 305–327. [Google Scholar] [CrossRef]
- Wright, G.B.; Fornberg, B. Stable computations with flat radial basis functions using vector-valued rational approximations. J. Comput. Phys. 2017, 331, 137–156. [Google Scholar] [CrossRef] [Green Version]
- Flyer, N.; Wright, G.B.; Fornberg, B. Radial Basis Function-generated Finite Differences: A Mesh-free Method for Computational Geosciences. In Handbook of Geomathematics; Freeden, W., Nashed, M., Sonar, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Yao, G.; Duo, J.; Chen, C.; Shen, L. Implicit local radial basis function interpolations based on function values. Appl. Math. Comput. 2015, 265, 91–102. [Google Scholar] [CrossRef]
- Ahmad, I.; Khaliq, A. Local RBF method for multi-dimensional partial differential equations. Comput. Math. Appl. 2017, 74, 292–324. [Google Scholar] [CrossRef]
- Sun, J.; Yi, H.-L.; Xie, M.; Tan, H.-P. New implementation of local RBF meshless scheme for radiative heat transfer in participating media. Int. J. Heat Mass Transf. 2016, 95, 440–452. [Google Scholar] [CrossRef]
- Oru, M. Two meshless methods based on local radial basis function and barycentric rational interpolation for solving 2D viscoelastic wave equation. Comput. Math. Appl. 2020, 79, 3272–3288. [Google Scholar]
- Gunderman, D.; Flyer, N.; Fornberg, B. Transport schemes in spherical geometries using spline-based RBF-FD with polynomials. J. Comput. Phys. 2020, 408, 109256. [Google Scholar] [CrossRef]
- Flyer, N.; Fornberg, B.; Bayona, V.; Barnett, G.A. On the role of polynomials in RBF-FD approximations: I. Interpolation and accuracy. J. Comput. Phys. 2016, 321, 21–38. [Google Scholar] [CrossRef] [Green Version]
- McGregor, J.L. Economical Determination of Departure Points for Semi-Lagrangian Models. Mon. Weather Rev. 1993, 121, 221–230. [Google Scholar] [CrossRef]
- Lauritzen, P.H.; Skamarock, W.C.; Prather, M.J.; Taylor, M.A. A standard test case suite for two-dimensional linear transport on the sphere. Geosci. Model Dev. 2012, 5, 887–901. [Google Scholar] [CrossRef] [Green Version]
- Ringler, T.; Thuburn, J.; Klemp, J.; Skamarock, W. A unified approach to energy conservation and potential vorticity dynamics for arbitrarily-structured C-grids. J. Comput. Phys. 2010, 229, 3065–3090. [Google Scholar] [CrossRef]
- Gavete, L.; Alonso, B.; Ureña, F.; Benito, J.J.; Herranz, J. Pseudo-spectral/finite-difference adaptive method for spherical shallow-water equations. Int. J. Comput. Math. 2008, 85, 461–473. [Google Scholar] [CrossRef]
- Williamson, D.L.; Drake, J.B.; Hack, J.J.; Jakob, R.; Swarztrauber, P.N. A standard test set for numerical approximations to the shallow water equations in spherical geometry. J. Comput. Phys. 1992, 102, 211–224. [Google Scholar] [CrossRef]
- Mohammadi, V.; Dehghan, M.; Khodadadian, A.; Wick, T. Numerical investigation on the transport equation in spherical coordinates via generalized moving least squares and moving kriging least squares approximations. Eng. Comput. 2021, 37, 1231–1249. [Google Scholar] [CrossRef]
- Fornberg, B.; Merrill, D. Comparison of finite difference- and pseudospectral methods for convective flow over a sphere. Geophys. Res. Lett. 1997, 24, 3245–3248. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Yu, R.; Li, J. Implementation of a conservative two-step shape-preserving advection scheme on a spherical icosahedral hexagonal geodesic grid. Adv. Atmos. Sci. 2017, 34, 411–427. [Google Scholar] [CrossRef]
- Zhang, Y.; Nair, R.D. A Nonoscillatory Discontinuous Galerkin Transport Scheme on the Cubed Sphere. Mon. Weather Rev. 2012, 140, 3106–3126. [Google Scholar] [CrossRef] [Green Version]
- Dong, L.; Wang, B. Trajectory-Tracking Scheme in Lagrangian Form for Solving Linear Advection Problems: Interface Spatial Discretization. Mon. Weather Rev. 2013, 141, 324–339. [Google Scholar] [CrossRef]
- Nair, R.D.; Jablonowski, C. Moving Vortices on the Sphere: A Test Case for Horizontal Advection Problems. Mon. Weather Rev. 2008, 136, 699–711. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of RBF | Abbreviation | Definition |
|---|---|---|
| Gaussian | GA | |
| Multiquadric | MQ | |
| Inverse multiquadric | IMQ | |
| Inverse quadratic | IQ |
| Refinement Level | Node Number | Time-Step | Midpoint Rule | RK4 | RK5 |
|---|---|---|---|---|---|
| Level 3 | 642 | 2 h | 0.0012 | ||
| 4 h | 0.0049 | ||||
| 8 h | 0.0205 | 1.4 × 10−3 | |||
| Level 4 | 2562 | 2 h | 0.0012 | ||
| 4 h | 0.0049 | ||||
| 8 h | 0.0205 | 1.4 × 10−3 | |||
| Level 5 | 10,242 | 2 h | 0.0012 | ||
| 4 h | 0.0049 | 8.1164 | |||
| 8 h | 0.0205 | 1.4 × 10−3 |
| Method | Basis Function and c | Node Number | Time-Step | Norm | Norm |
|---|---|---|---|---|---|
| SL method (Global RBFs) | GA, c = 1.5 | 642 | 4 h | 0.0443 | 0.0371 |
| GA, c = 6.0 | 2562 | 2 h | 0.0046 | 0.0030 | |
| GA, c = 16.0 | 10,242 | 1 h | 0.0011 | 0.0011 | |
| PS method | - | 9/40 h | 0.2243 | 0.1874 | |
| - | 9/80 h | 0.0558 | 0.0460 | ||
| - | 9/160 h | 0.0556 | 0.0483 | ||
| FD2 method | - | 9/40 h | 1.0790 | 0.6150 | |
| - | 9/80 h | 1.0211 | 0.6056 | ||
| - | 9/160 h | 0.7574 | 0.5983 | ||
| RBF method | GA, c = 3.2 | 642 | 1/20 h | 0.0987 | 0.0471 |
| GA, c = 6.0 | 2562 | 1/80 h | 0.0242 | 0.0061 | |
| GA, c = 16.0 | 10,242 | 1/320 h | 0.0043 | 0.0021 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, F.; Zhang, F.; Wang, T.; Tian, G.; Wu, F. High-Order Semi-Lagrangian Schemes for the Transport Equation on Icosahedron Spherical Grids. Atmosphere 2022, 13, 1807. https://doi.org/10.3390/atmos13111807
Lu F, Zhang F, Wang T, Tian G, Wu F. High-Order Semi-Lagrangian Schemes for the Transport Equation on Icosahedron Spherical Grids. Atmosphere. 2022; 13(11):1807. https://doi.org/10.3390/atmos13111807
Chicago/Turabian StyleLu, Fuqiang, Fengyuan Zhang, Tian Wang, Guozhong Tian, and Feng Wu. 2022. "High-Order Semi-Lagrangian Schemes for the Transport Equation on Icosahedron Spherical Grids" Atmosphere 13, no. 11: 1807. https://doi.org/10.3390/atmos13111807
APA StyleLu, F., Zhang, F., Wang, T., Tian, G., & Wu, F. (2022). High-Order Semi-Lagrangian Schemes for the Transport Equation on Icosahedron Spherical Grids. Atmosphere, 13(11), 1807. https://doi.org/10.3390/atmos13111807